Après le quadricoptère Quad
9, restons dans le monde du multicoptère avec ce Triomini,
un tricoptère qui conserve le même esprit de simplicité
pour être à la portée du plus grand nombre. N'allez
cependant pas croire que ce choix va à l'encontre des performances.
Le Triomini est stable, précis, robuste et dispose d'une charge
utile importante. Il convient donc pour l'apprentissage comme pour les
translations rapides et peut même recevoir un équipement
de vol en immersion avec caméra HD style GoPro. Le pilotage devient
alors très amusant, avec par exemple du slalom entre les arbres,
des courses-poursuites avec les modèles des copains, ou tout
simplement la découverte des environs vus du ciel.
Immersion en tricopter dans un jardin d'enfants (déserté...).
Petite séance de gymkhana avec les arbres et les obstacles, ça procure
des sensations de liberté vraiment extra. L'image dans les lunettes
n'est pas top, on ne voit pas toutes les branches, surtout quand
le temps est couvert, mais l'engin est costaud... Zic : Shaka Ponk - My name is Stain
Le tricoptère vous intéresse mais vous n'avez
pas encore osé franchir le pas ? Le Triomini devrait répondre
à votre demande, il est facile à construire et à
piloter.
L'émetteur donne l'échelle de ce petit tricoptère.
Une simple radio 4 voies sans mixage suffit, c'est la carte électronique
qui gère tout. Le décrochement à l'avant permet
de recevoir une figurine de pilote ou bien une caméra type
GoPro2.
Avec la carte électronique
qui stabilise la machine, le pilotage du Triomini est bien plus
facile que celui d'un hélicoptère classique.
Sur un quadricoptère, la rotation sur l'axe
de lacet - qui permet de tourner sur place par exemple - s'effectue
par variation du régime des moteurs diamétralement opposés.
La réaction est donc douce et assez lente. Sur un tricoptère,
c'est le moteur placé à l'arrière sur un axe rotatif
qui se penche sur les côtés. Le souffle de l'hélice
incliné est donc beaucoup plus efficace pour faire varier la
direction. La portance diminue légèrement mais la carte
électronique gère et augmente le régime moteur
pour compenser et éviter le basculement vers l'arrière.
Il faut donc un peu de mécanique pour réaliser ce support
pivotant et un servo pour le piloter.
Les solutions retenues ici ne nécessitent qu'un minimum d'outillage
; l'axe est un boulon métallique glissé dans deux roulements
à billes. Le système robuste est invisible une fois installé
tout en restant démontable pour une éventuelle maintenance.
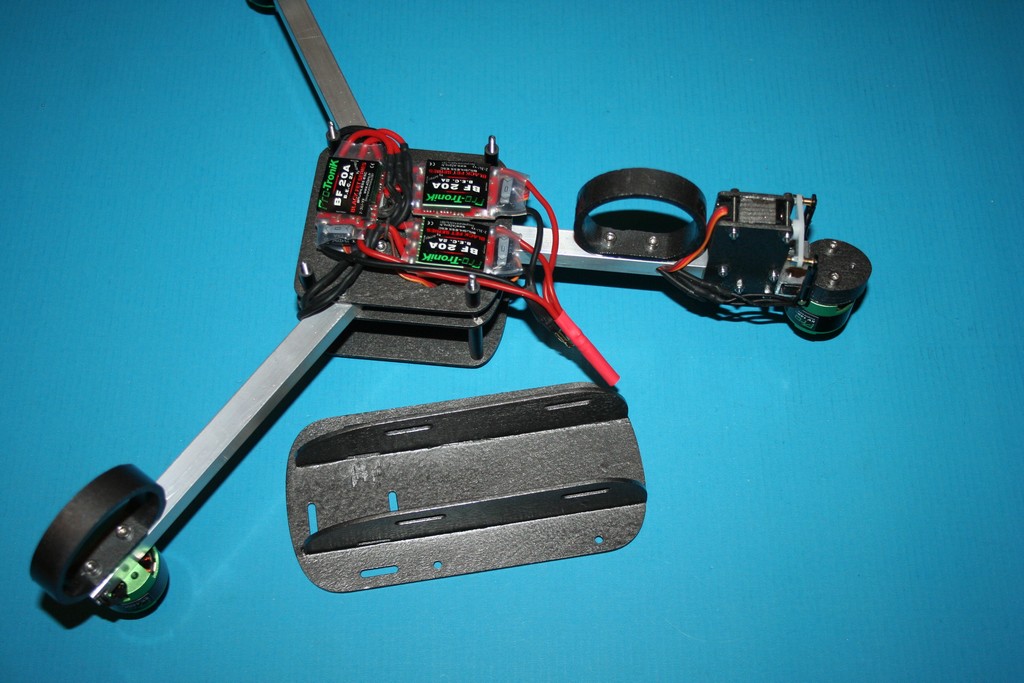
Triomini équipé pour le vol en immersion.
Slalom entre les arbres façon "Guerre des étoiles"...
Sensations de pilotage géniales. Pour ceux qui se posent
la question, seule la partie de l'installation du matériel
a été accélérée. Le reste est
en vitesse réelle... Impressionnant quand on vit ça
dans les lunettes. Zic : Pearl Jam with Neil Joung - Like A Hurricane
Immersion en tricopter dans un jardin d'enfants (déserté...).
Petite séance de gymkhana avec les arbres et les obstacles, ça procure
des sensations de liberté vraiment extra. L'image dans les lunettes
n'est pas top, on ne voit pas toutes les branches, surtout quand
le temps est couvert, mais l'engin est costaud... Zic : Shaka Ponk - My name is Stain
La neige, c'est quand même plus sympa
avec du soleil... Petit vol en immersion entre midi et deux avant
de retourner au boulot...
Caractéristiques
Envergure (disques d'hélices
compris) : 50 cm
Longueur (disques d'hélices compris) : 46,5 cm
Entre-axe moteurs : 17,2 cm
Masse : 700 g
Equipements
Moteurs : 3 x DM 2210 1100 kV Pro-Tronik
Contrôleurs : 3 x BF 20A Pro-Tronik
Hélices : 3 x hélices Gaui 8"x4"
(2 pas à droite, 1 pas à gauche)
Carte de stabilisation : MultiWii MWC Crius SE
Servo : 7470 TG-D Pro-Tronik
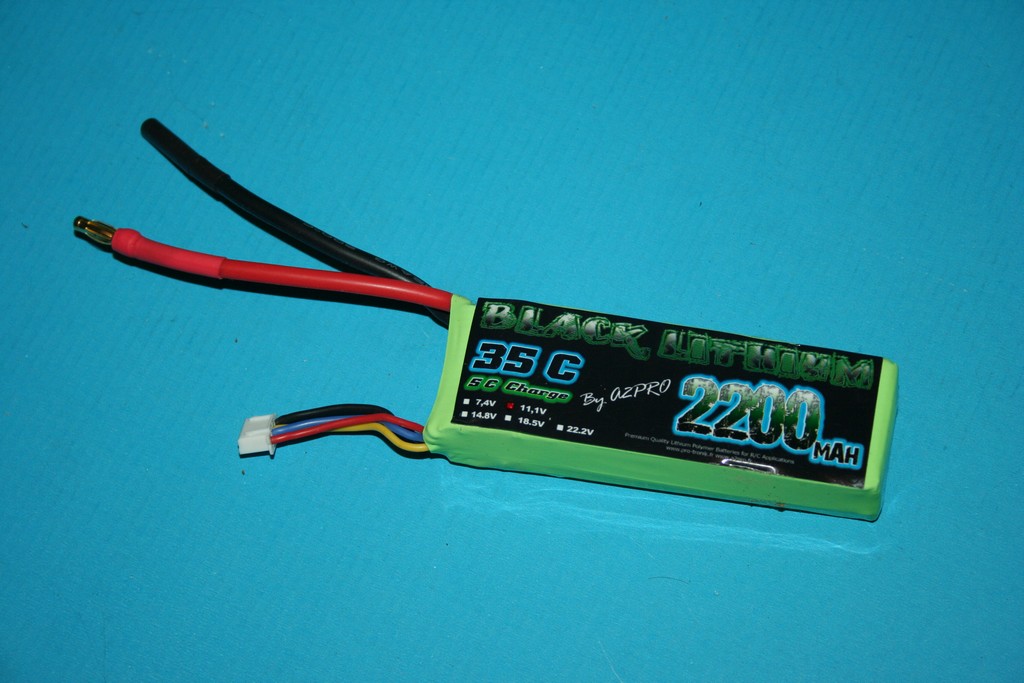
Batterie : 3S 2200 mAh 35C
Radio : 4 voies
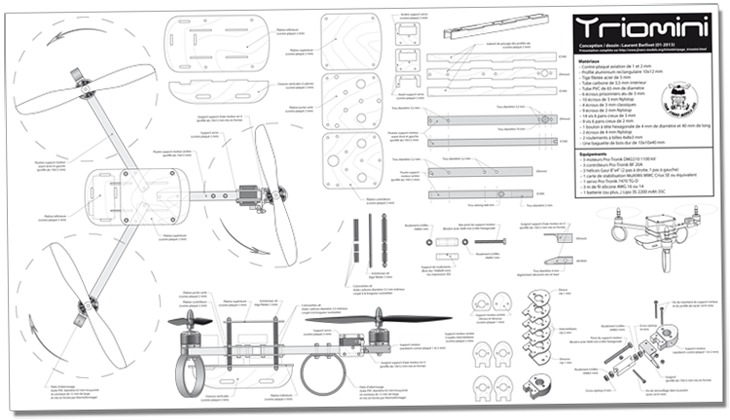
Cliquer
sur l'image pour télécharger le plan échelle
1
(100x56 cm, format PDF 1,33 Mo)
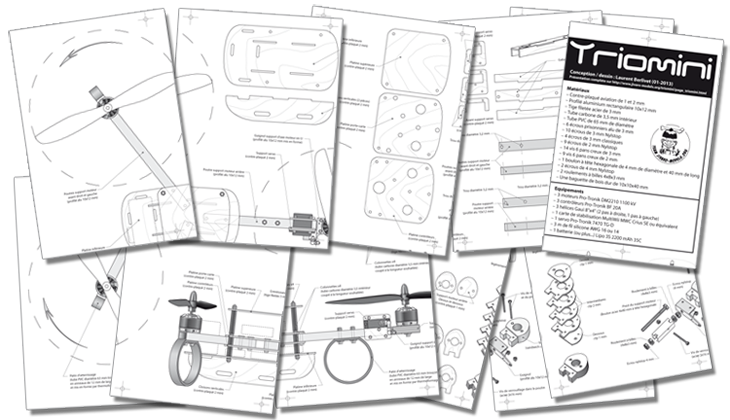
Cliquer
sur l'image pour télécharger le plan échelle
1 à imprimer sur 12 feuilles au format A4
(format PDF 3,56 Mo)
L'outillage
Pour la découpe des pièces en bois,
une scie à chantourner convient tout à fait. Les formes
du châssis n'ont rien de très original puisque la simplicité
de fabrication reste la priorité. Chacun pourra modifier suivant
ses goûts et besoins. Celui qui est proposé peut être
utilisé tel quel, mais un emplacement existe pour y placer une
caméra ainsi qu'un émetteur vidéo sans avoir à
modifier quoi que ce soit.
Une scie à métaux permettra de tronçonner les profilés
en aluminium pour les bras, les tiges filetées, les tubes en
carbone pour les colonnettes et les anneaux en PVC faisant office de
patins d'atterrissage.
Une lime à dents fines est utile pour ébavurer toutes
ces pièces ainsi que quelques morceaux de papier de verre de
grains variés.
Il faut aussi une mini-perceuse et si possible une perceuse à
colonne (pas indispensable) avec un éventail de mèches
de 2 à 8 mm de diamètre.
Un fer à souder permettra de câbler les moteurs et contrôleurs.
Pour finir, un décapeur thermique sera utilisé pour mettre
en forme les anneaux de PVC.
Note : Tous les liens donnés
ici ne le sont qu'à titre indicatif. Libre à vous
de vous procurer les composants chez les fournisseurs cités,
ou d'effectuer vos propres recherches sur le Net. Les sites regorgent
de matériels dont les performances sont régulièrement
améliorées, à vous de choisir ce qui vous conviendra
le mieux, que ce soit au niveau des caractéristiques, de
l'encombrement, du prix, de la provenance, de la disponibilité...
Liste
des matériaux et équipements
A titre indicatif, les matériaux listés
ci-dessous peuvent être commandés sur le site A2Pro
Online ou chez votre détaillant.
Pour les autres, il faut se rendre dans un magasin de bricolage
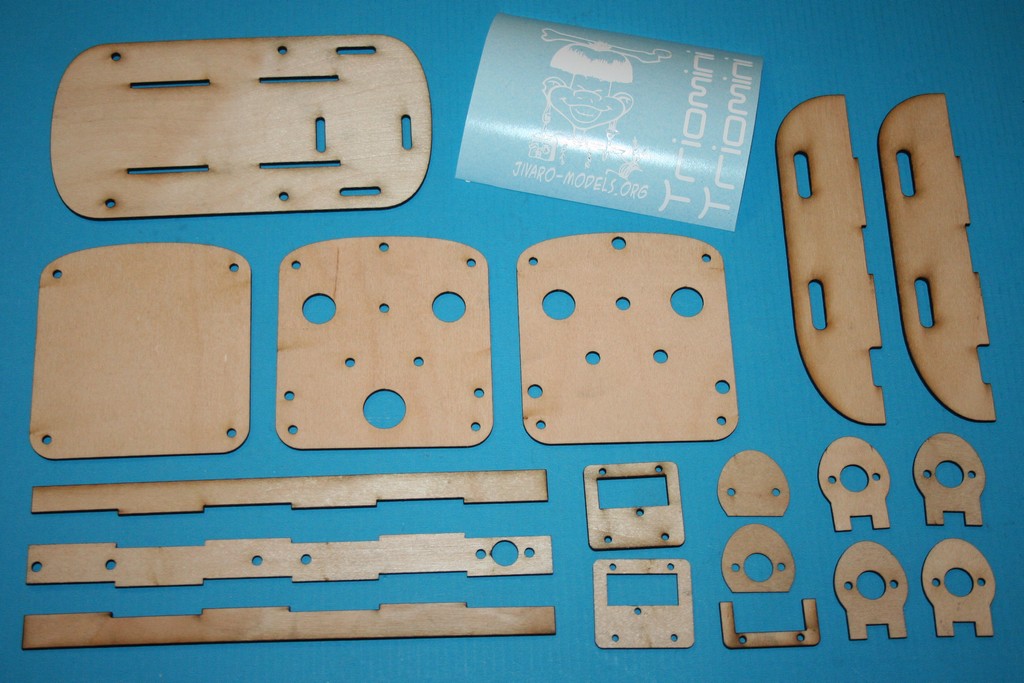
Je dispose de quelques
shortkits (quantité très limitée) du Triomini,
comportant toutes les pièces en contre-plaqué aviation
découpées au laser pour fabriquer le châssis
ainsi que les gabarits pour le perçage des bras en alu. Le
prix est de 25 € hors frais de port.
Contact :laurent@jivaro-models.org
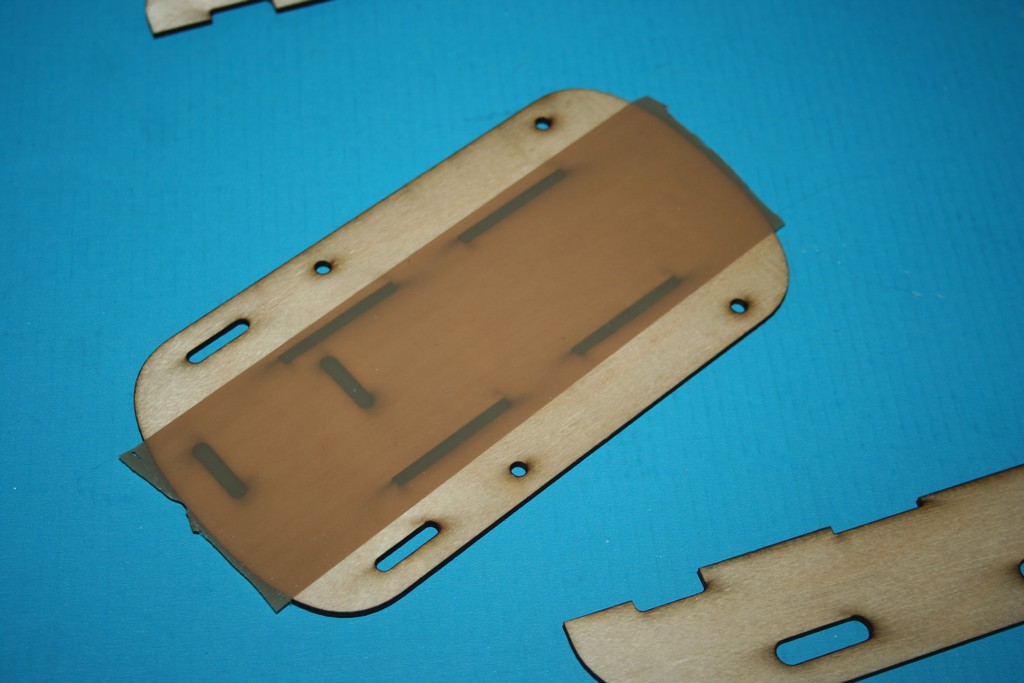
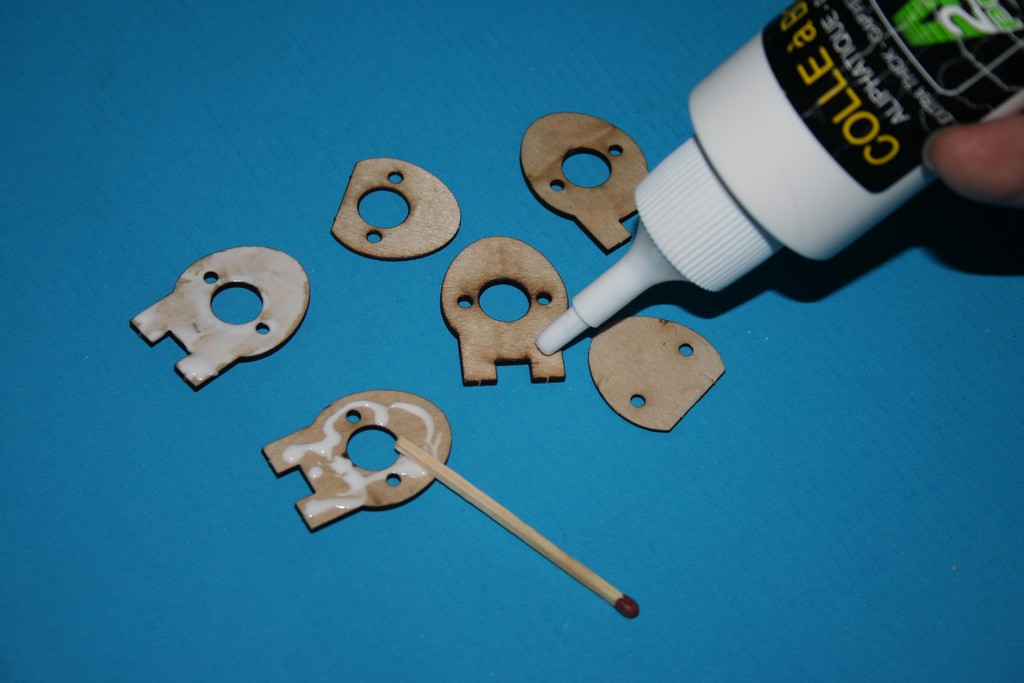
Les contours des pièces en contre-plaqué
de 2 mm se découpent aisément à la scie à
chantourner, tout comme les évidements circulaires. Pour la dernière
version présentée ici, je suis passé par un artisan
équipé d'une machine de découpe laser (25 €
bois compris. Si intéressé, me
contacter pour une prochaine commande groupée). Les découpes
sont alors parfaites et font gagner du temps, notamment les mortaises
de la platine inférieure qui obligent à démonter
et remonter à plusieurs reprises la lame de scie. Elles sont
cependant indispensables pour la rigidité.
L'écartement des deux cloisons verticales est de 35 mm, ce qui
correspond à des batteries de 2 200 à 2 600 mAh. Si vous
prévoyez autre chose, il faudra peut-être les déplacer.
L'autonomie avec ces batteries est d'environ 8 minutes en embarquant
l’équipement vidéo, c'est déjà bien.
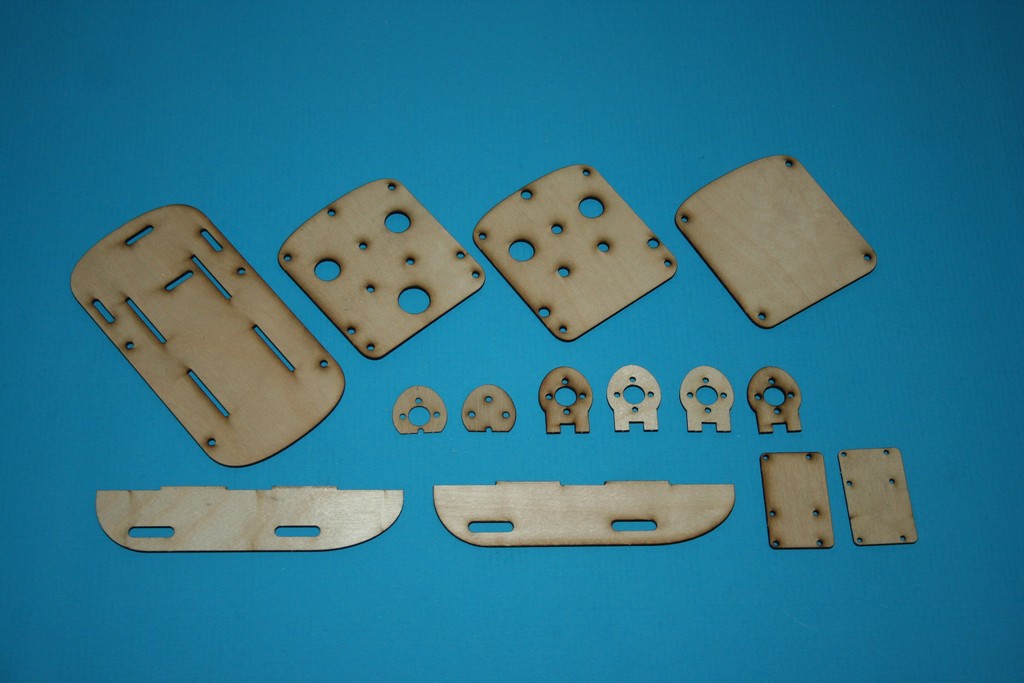
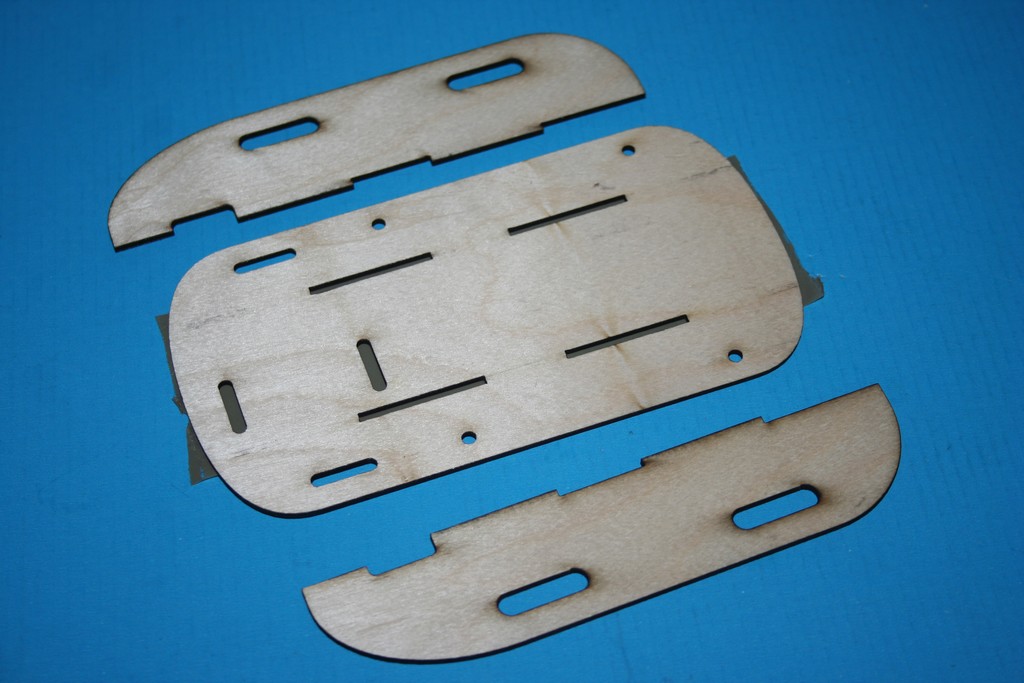
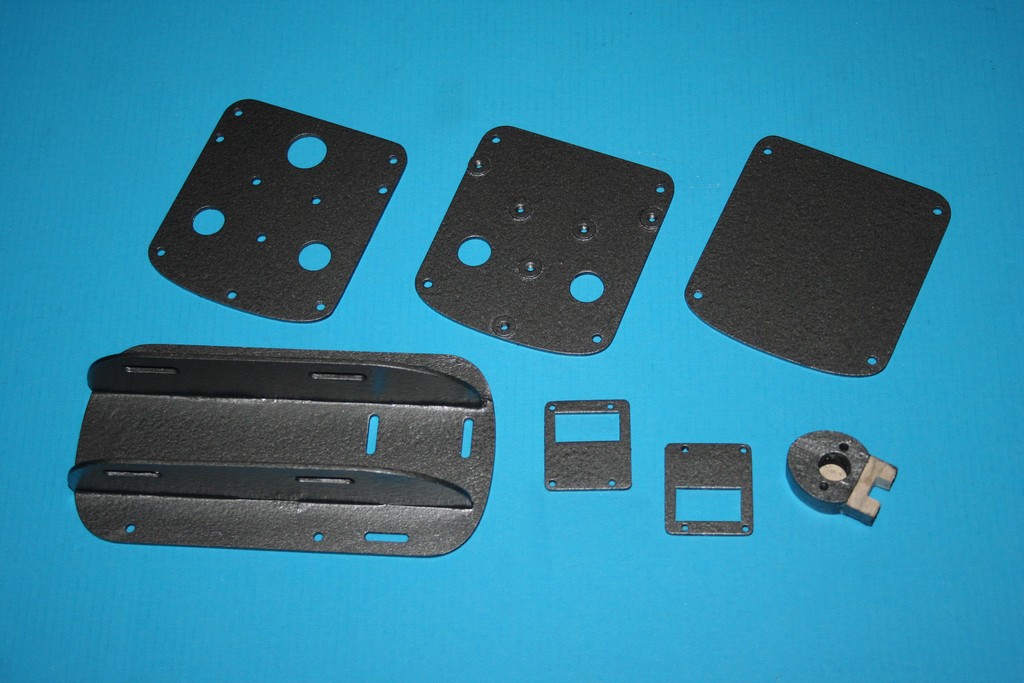
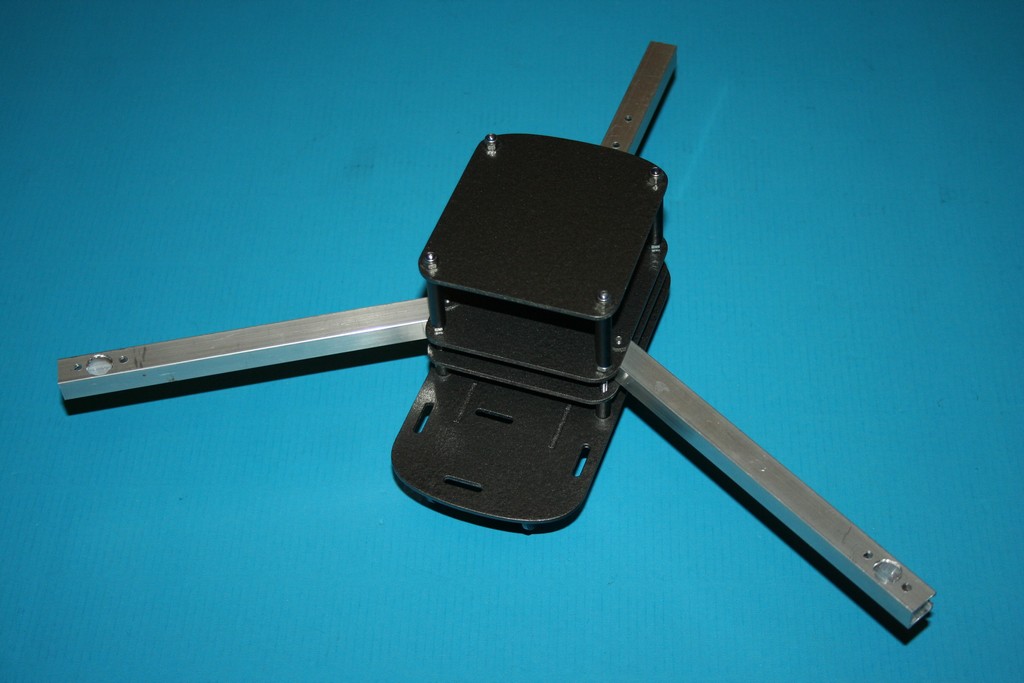
La structure du châssis
est composée de quelques platines découpées
dans du contre-plaqué aviation. Les formes restent assez
simples.
La base est renforcée par deux
raidisseurs qui soutiennent et protègent la batterie. Les
collages se font à l'époxy.
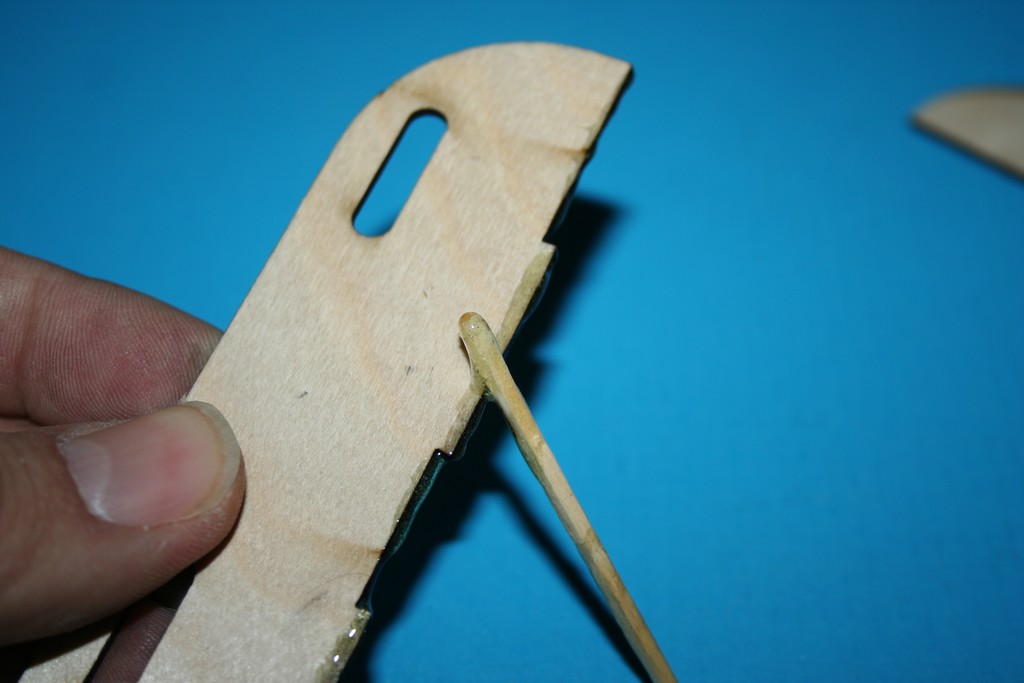
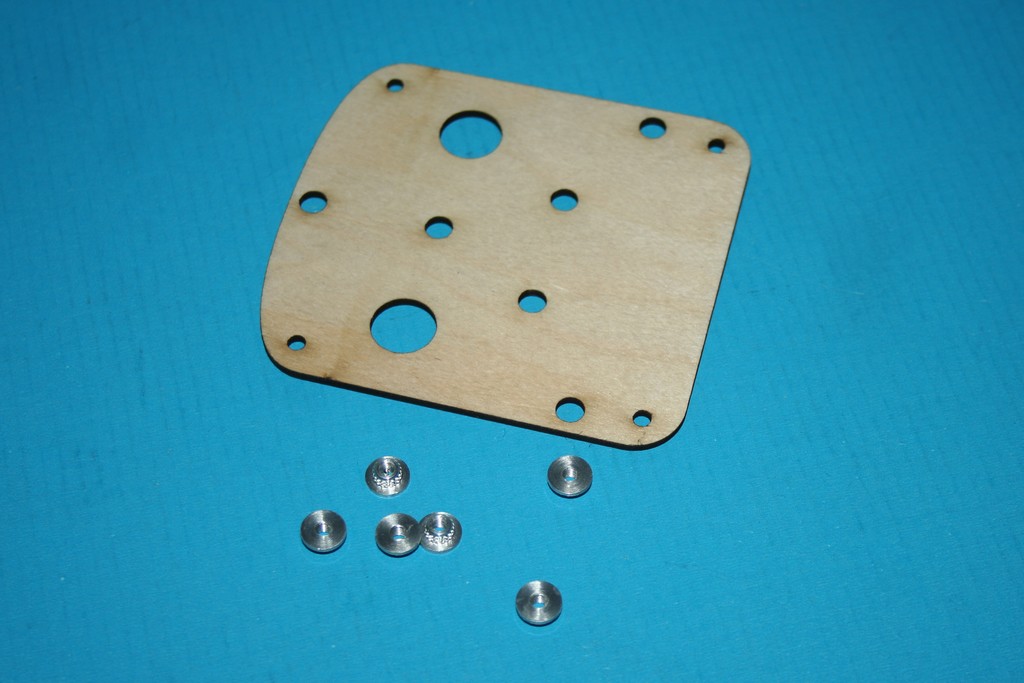
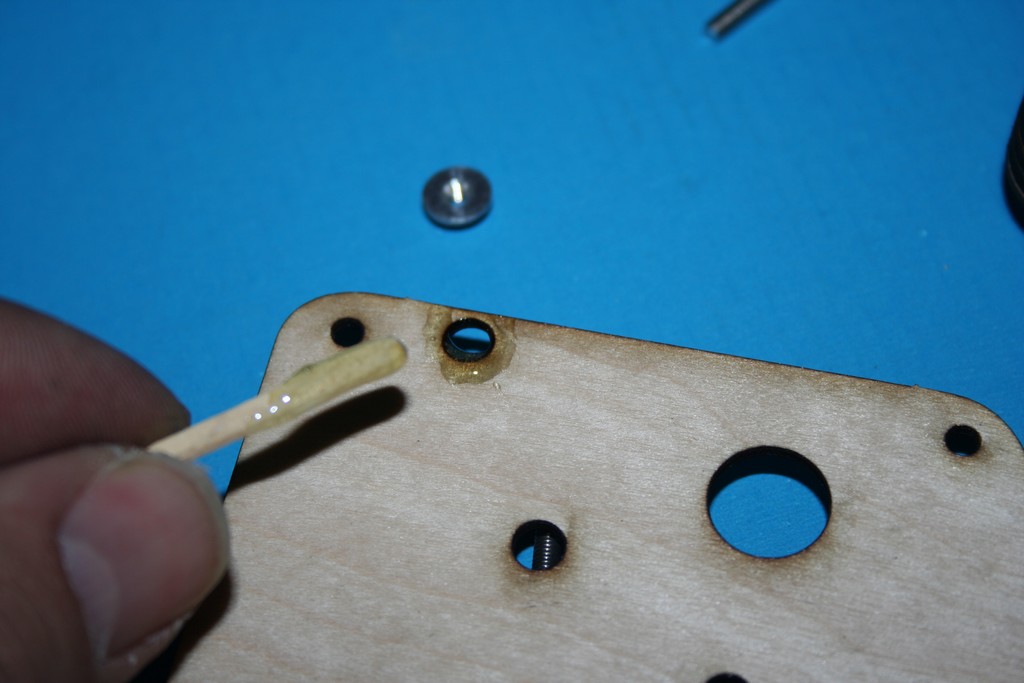
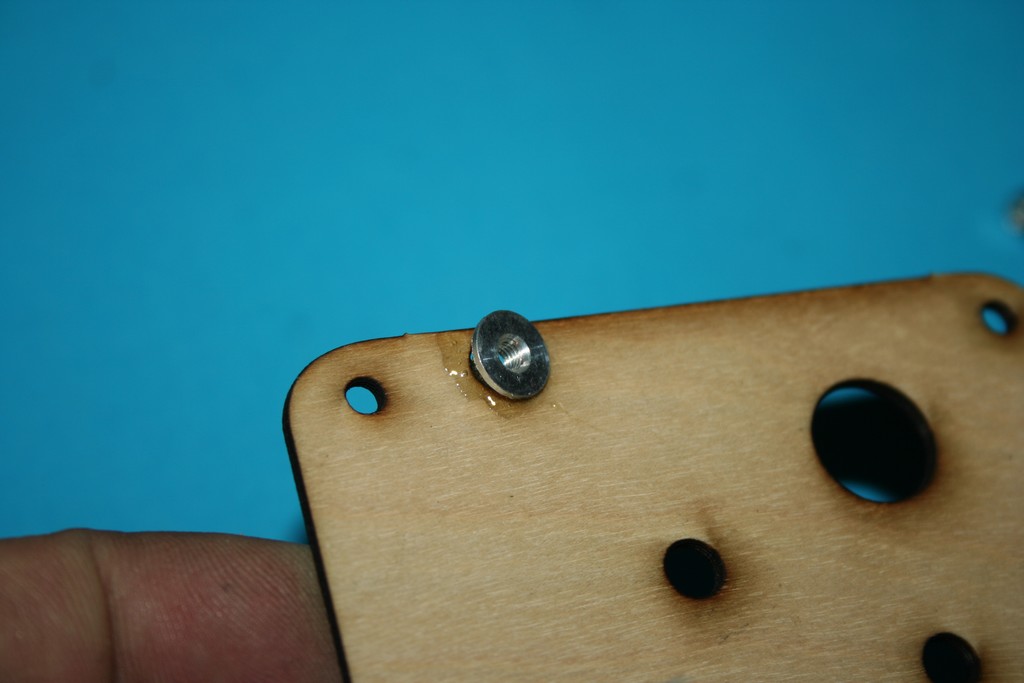
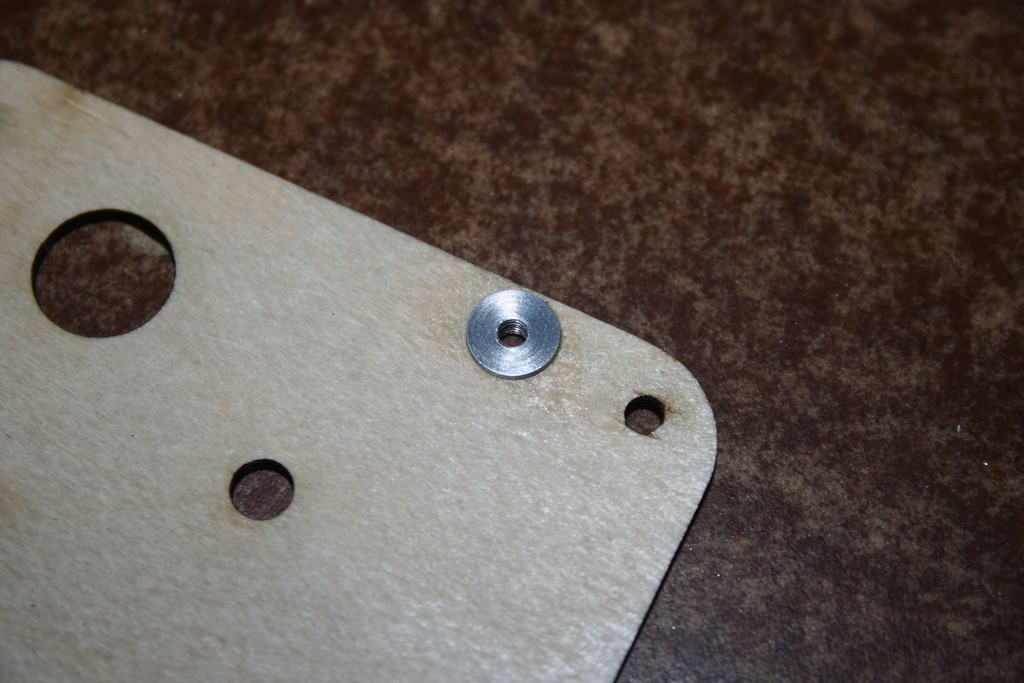
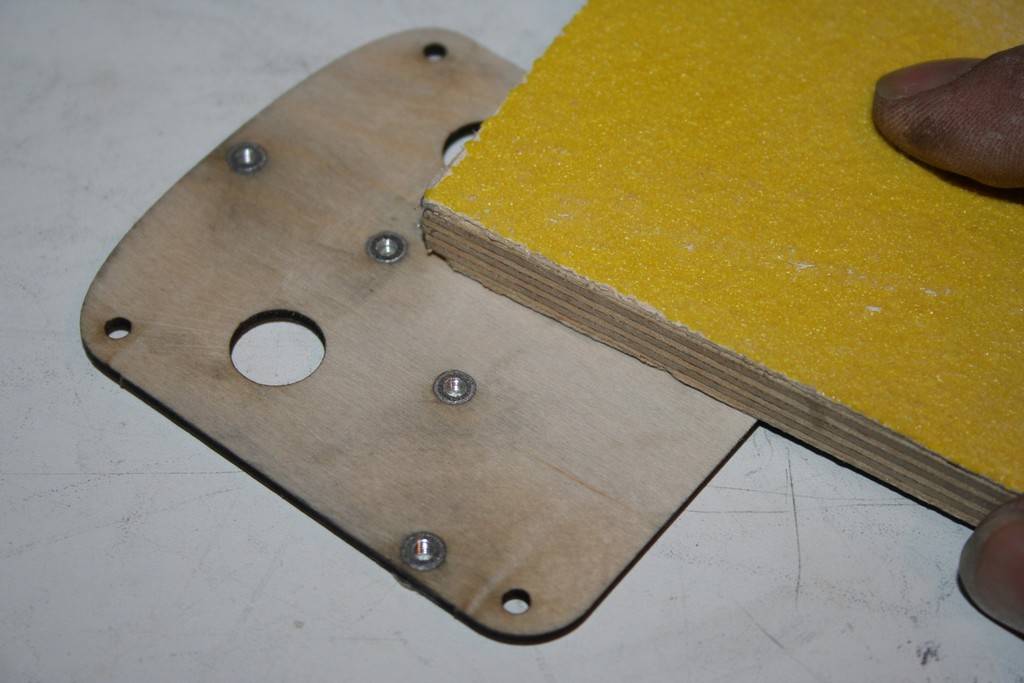
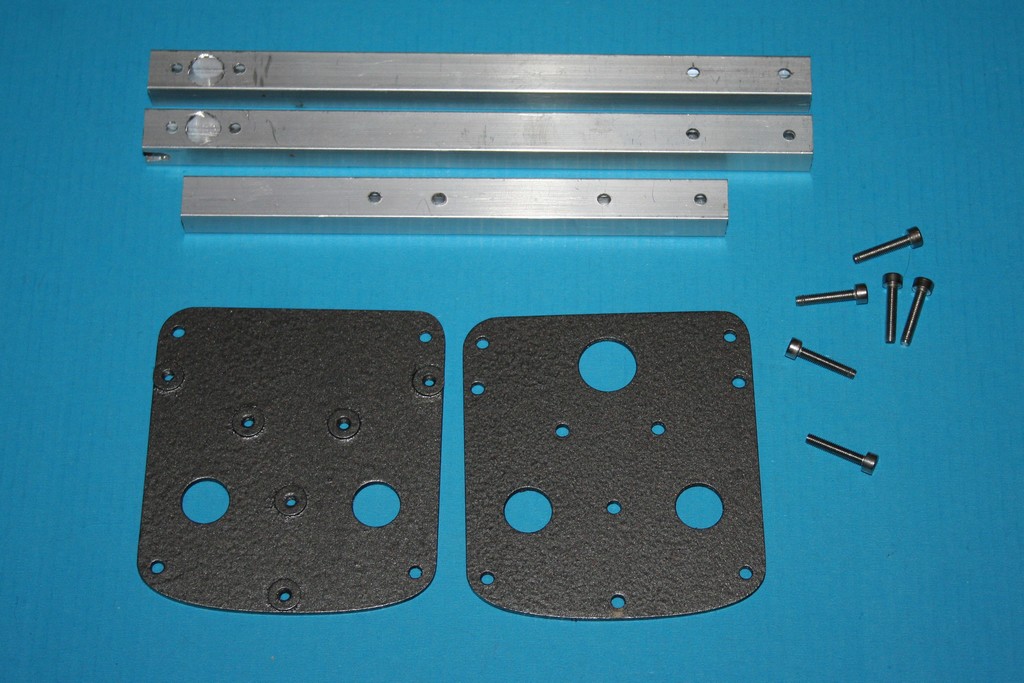
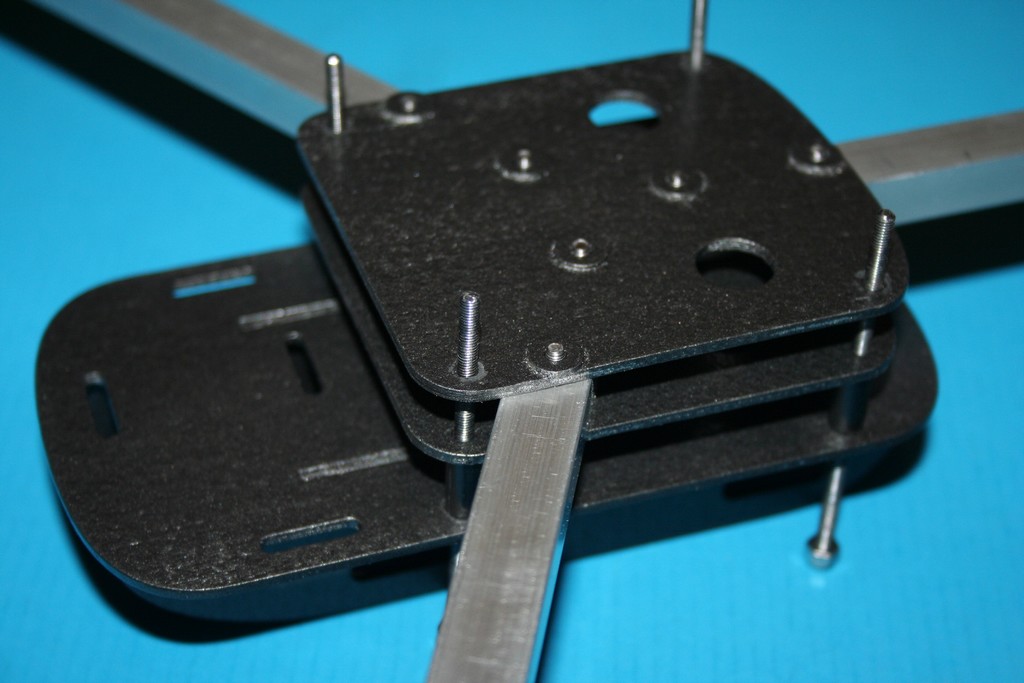
Les inserts filetés en aluminium sont enfoncés
sur la platine centrale d'un petit coup de marteau dans les trous correspondants
pré-encollés avec une goutte d'époxy. L'excédent
de colle est retiré avec un chiffon. En fonction des modèles,
ils peuvent dépasser sur l'autre face. Si c'est le cas, ils seront
alignés avec la surface du bois à l'aide d'une lime.
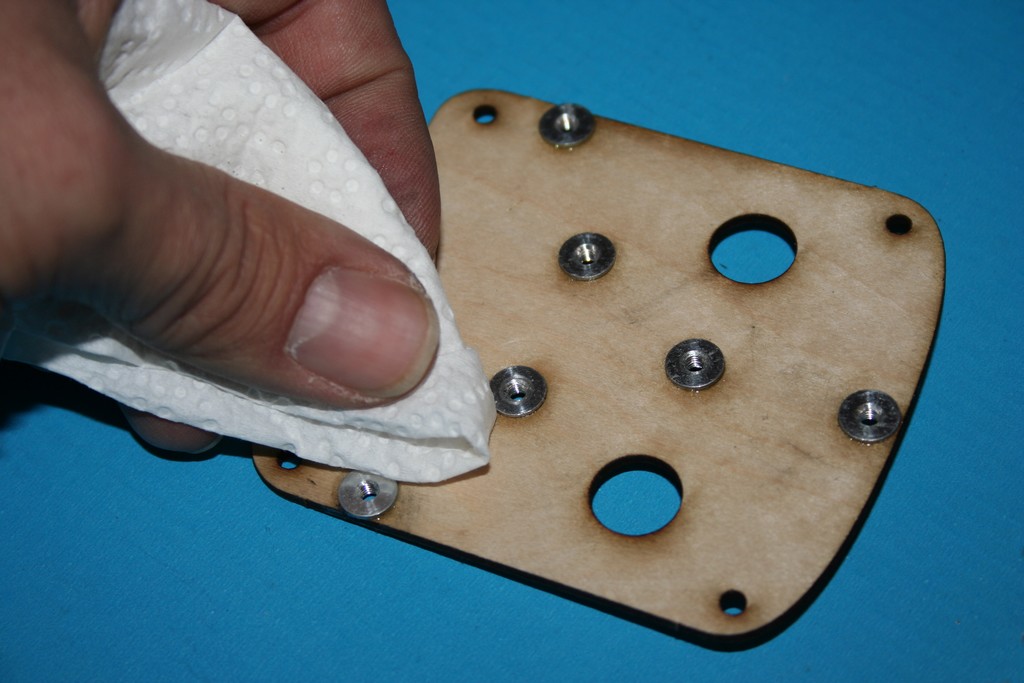
Mise en place à l'époxy
des écrous prisonniers en alu rentrés en force dans
les trous de la platine. L'excédent de colle est essuyé
avant séchage.
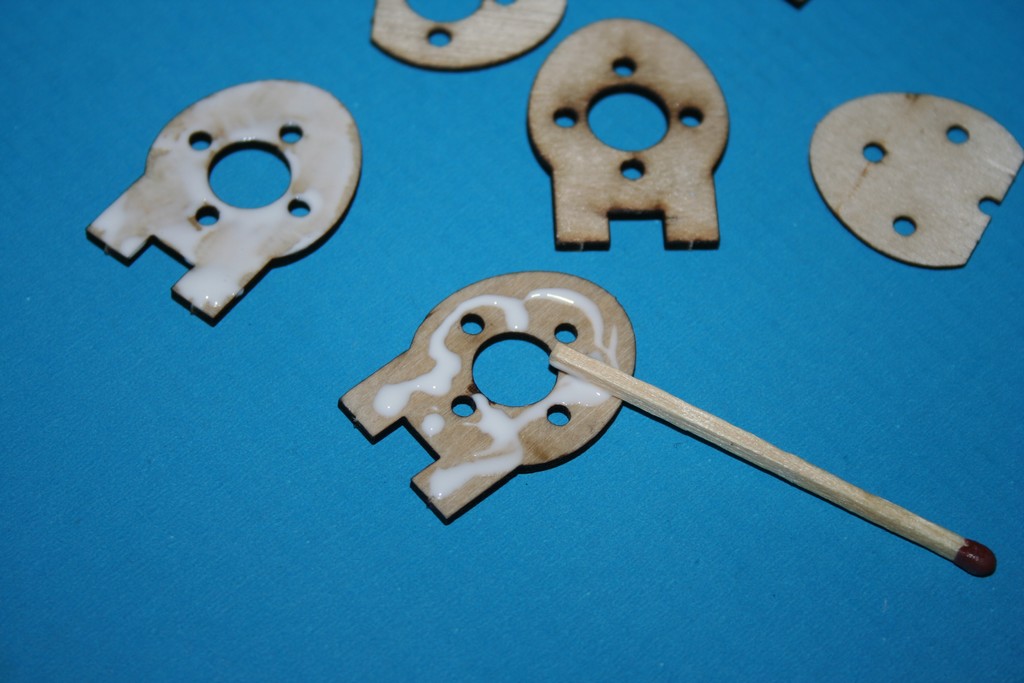
Le support du moteur arrière est composé
d'un empilement de couches de contre-plaqué qu'on colle en les
maintenant sous presse.
Après séchage, l'ensemble des pièces en bois reçoit
deux couches de bouche-pores suivies d'un ponçage au papier de
verre fin. Le tout peut alors être peint. J'ai utilisé
de la peinture martelée en bombe qui couvre rapidement et qui
masque totalement l'aspect du bois.
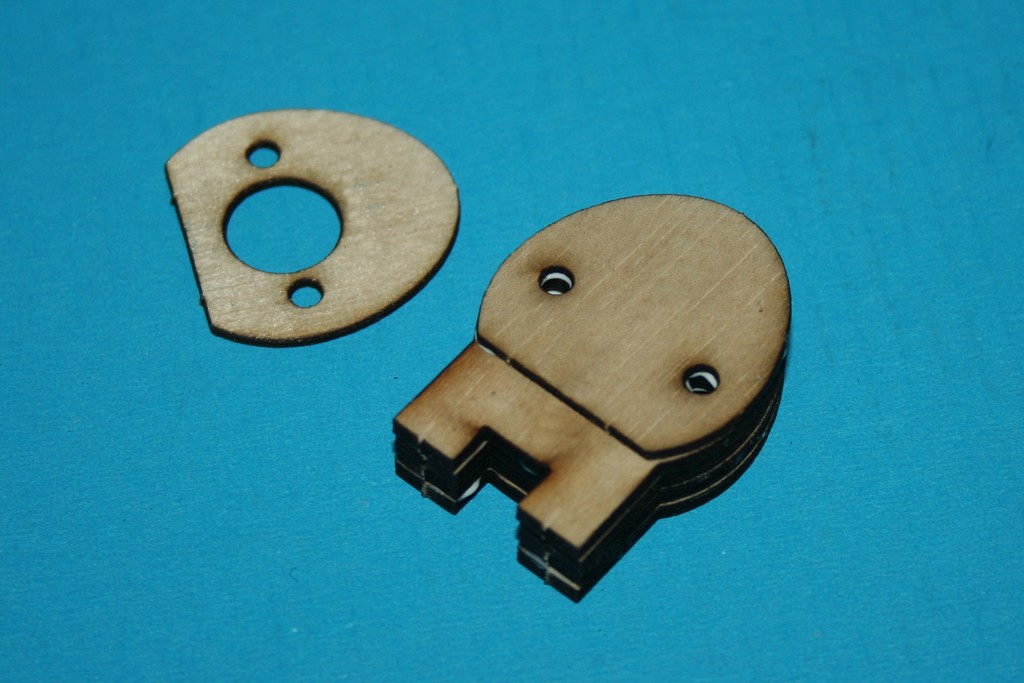
Le support du moteur arrière
est composé d'un assemblage de pièces en contre-plaqué
collées les unes sur les autres. Le dessus et le dessous du support moteur
sont plus fins et plus étroits. Le décrochement
servira à glisser le U qui permet l'articulation.
Pour masquer les fibres,
le bois est protégé par quelques couches de bouche-pores
poncées finement après séchage.
La peinture martelée en bombe,
gris foncé, masque totalement l'aspect du matériau.
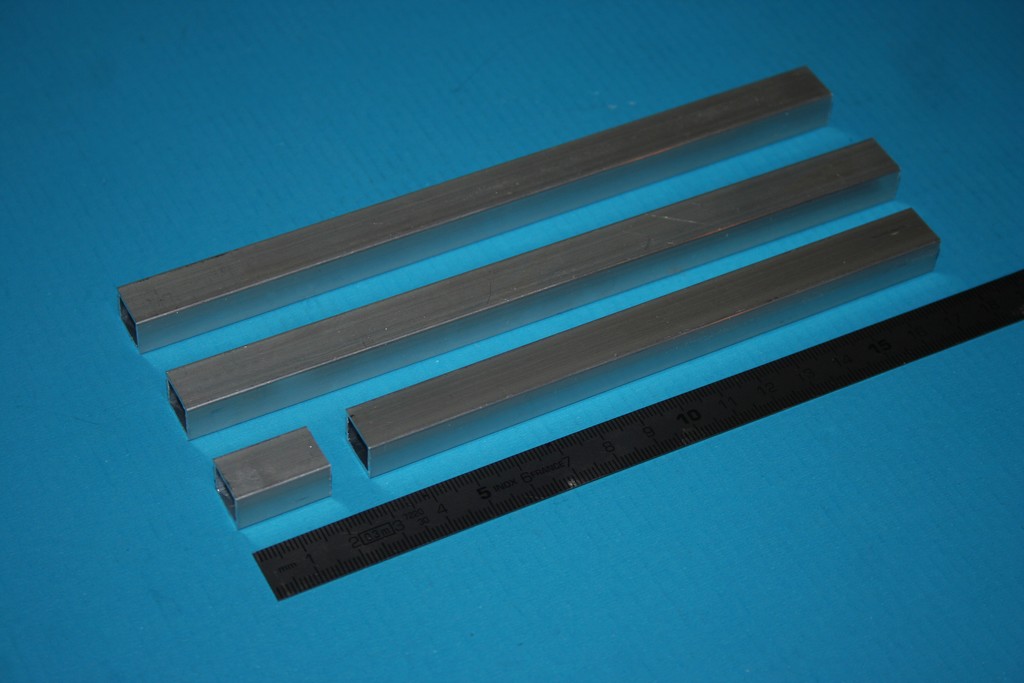
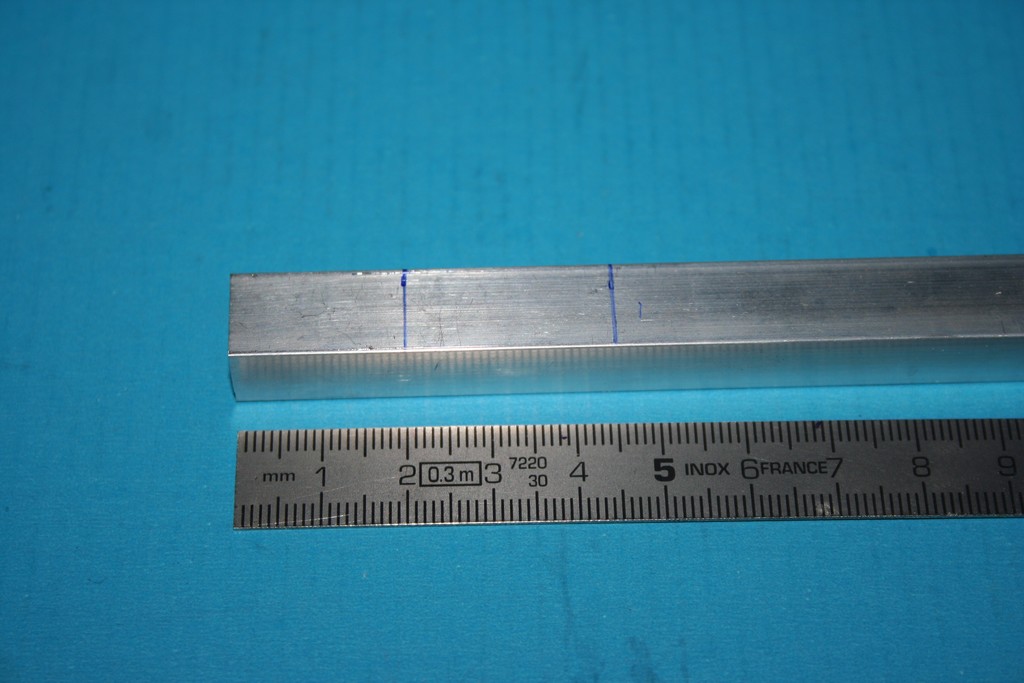
Les bras sont issus de profilés alu 10x12 mm
tronçonnés à la longueur souhaitée. Un gabarit
de perçage à assembler est dessiné sur le plan
et s'avère bien pratique, y compris pour percer les anneaux du
train d'atterrissage. La longueur de ces bras a été déterminée
par le diamètre des hélices, qui passent tout près
du châssis, pour que l'engin soit le plus compact possible. Ceux
qui craignent un manque de stabilité peuvent toujours les allonger
de quelques centimètres. Avec la carte Crius, je n'en ai vraiment
pas ressenti le besoin.
Les poutres sont tronçonnées dans un
profilé aluminium 10x12 qu'on trouve dans les grandes surfaces
pour le bricolage.
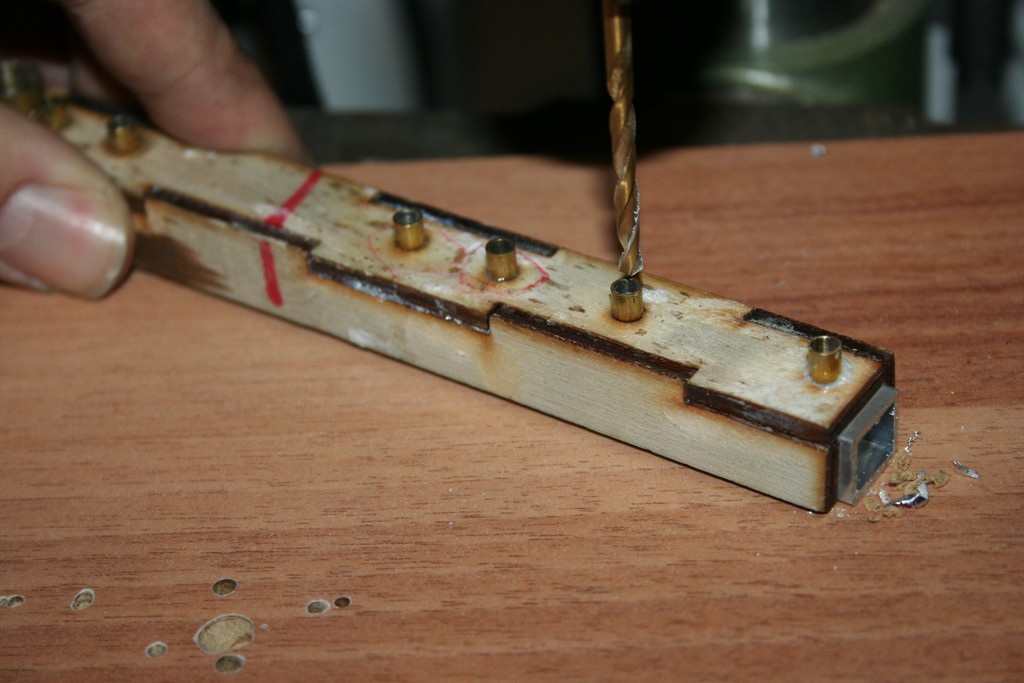
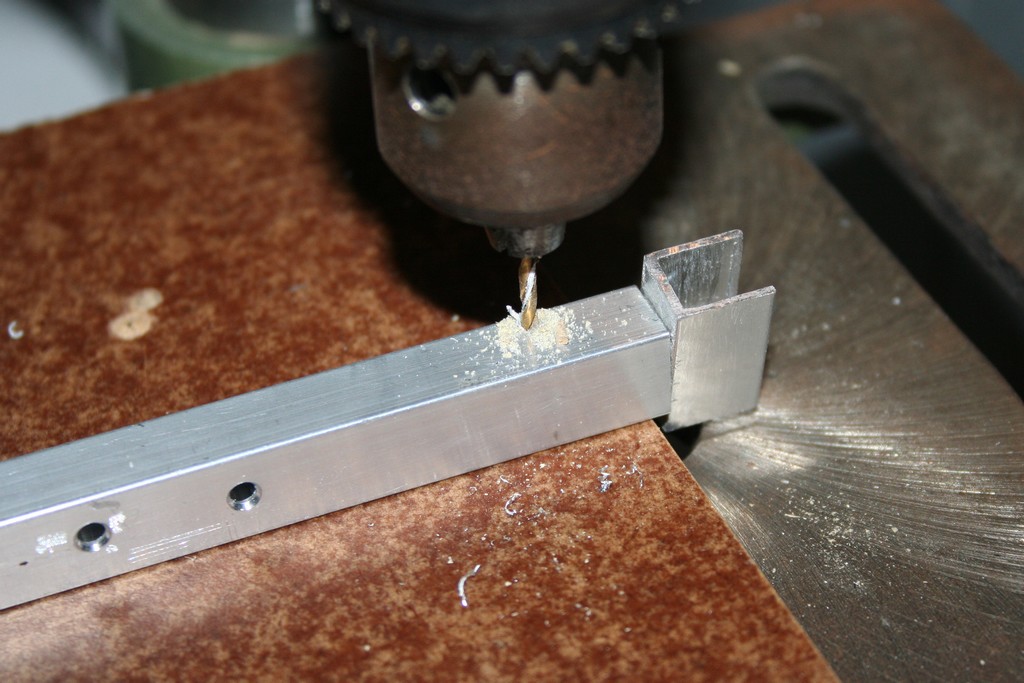
Un gabarit de perçage à assembler est
dessiné sur le plan. Il fait gagner du temps pour perforer
les tubes et les patins sans se tromper.
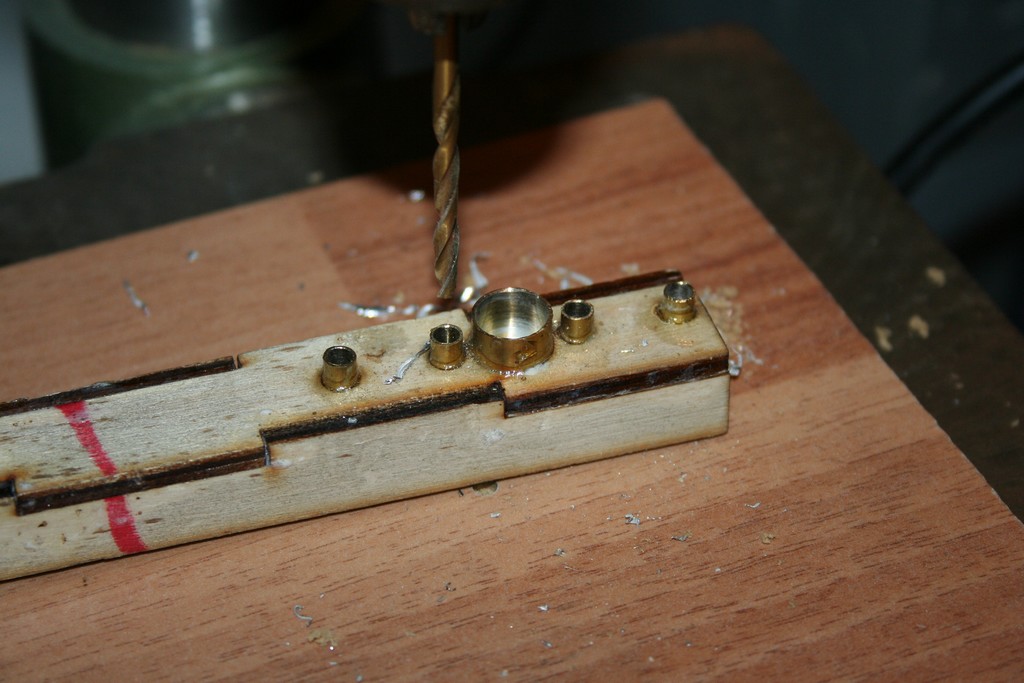
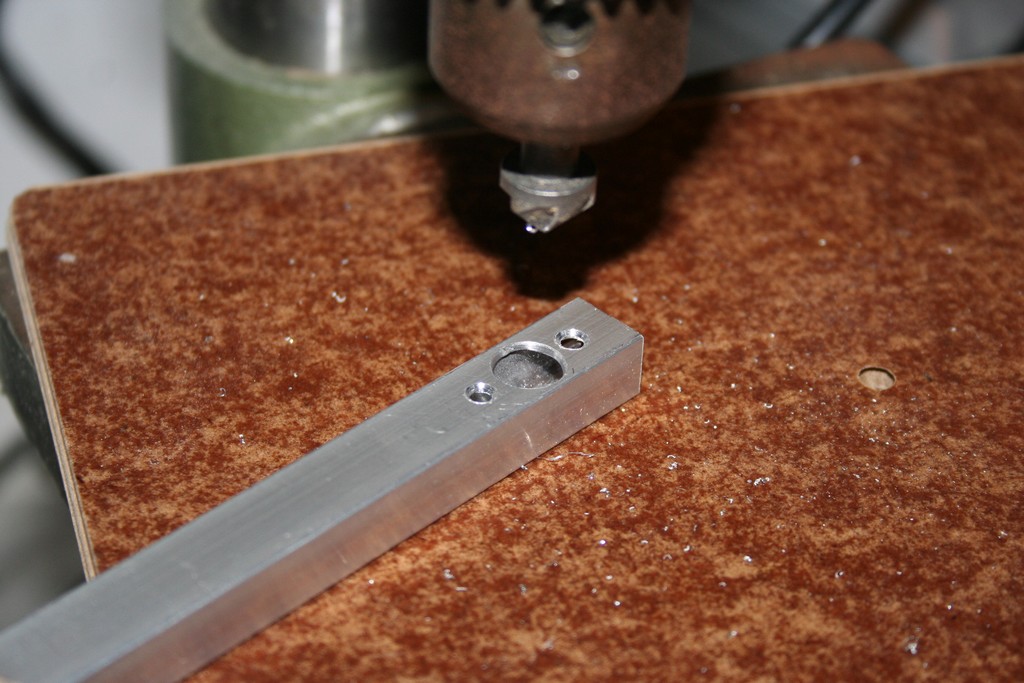
Les trous sont percés de préférence
à la perceuse à colonne puis fraisés afin d’obtenir
des bords parfaitement lisses. Le gros trou se trouve sur le moteur,
au niveau du roulement et de l'axe pour éviter tout frottement
si ces derniers venaient à dépasser.
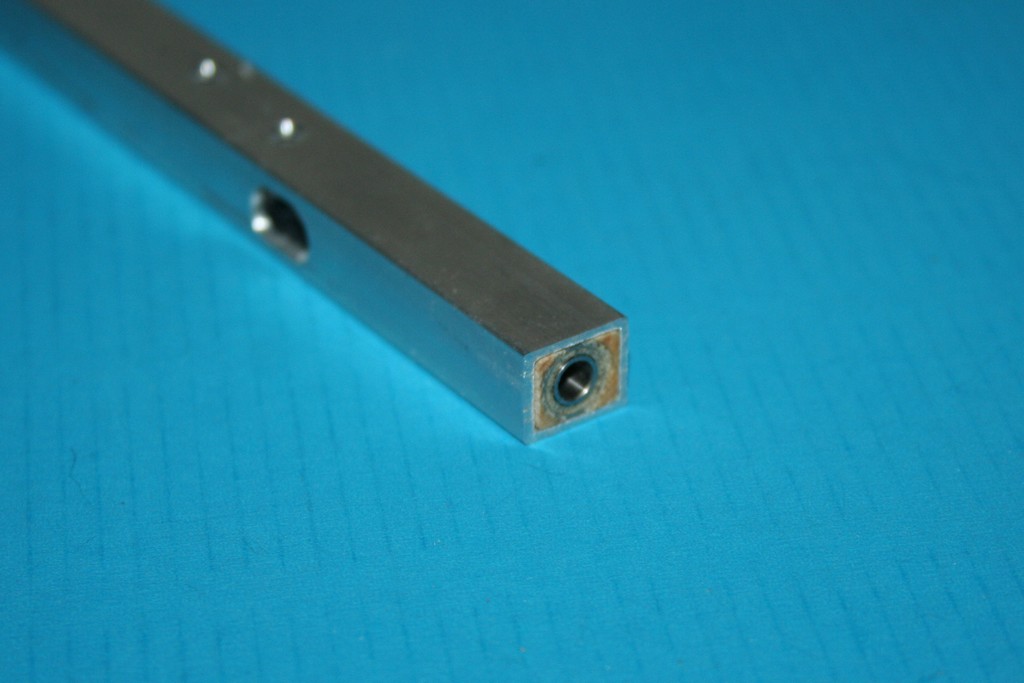
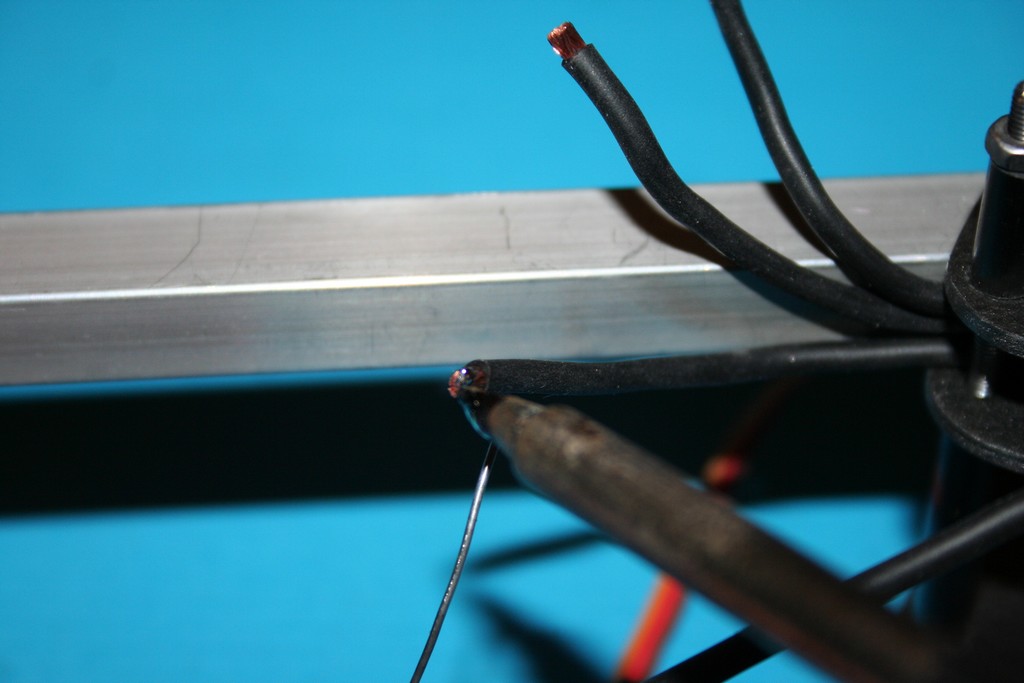
Les extrémités
des tubes sont évidées pour faire passer les fils
sur le côté, afin de ne pas les sectionner lorsqu'un
des bras vient frapper contre un obstacle. Un trou oblong est percé sur
un des flancs de la poutre arrière pour laisser passer
les fils électriques du moteur et du servo.
L'aluminium brut n'est pas très joli, le meilleur
traitement de surface est l'anodisation, qui peut se faire "à
la maison" avec un peu de précautions. La
méthode est détaillée sur cette page.
Il existe cependant une alternative plus simple en utilisant de la peinture
mais l'adhérence n'est pas fameuse sur ce matériau. Seule
la Tamiya PS transparente donne un résultat acceptable. Elle
reste très légèrement souple. Posée en couches
fines, l'aspect visuel obtenu est très proche de l'anodisation.
Pour relier les différentes platines, on utilise de la tige filetée
de 3 mm et des écrous. Des colonnettes en tube carbone tronçonné
permettent de masquer le filetage en donnant un aspect plus high tech,
et maintiennent l'espacement entre les platines.
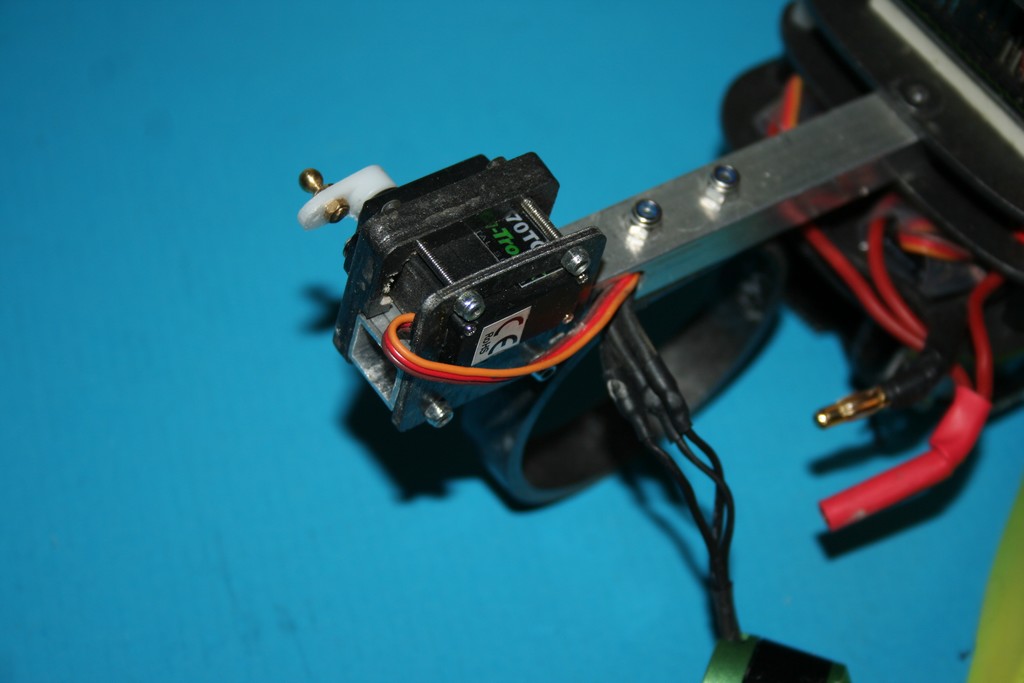
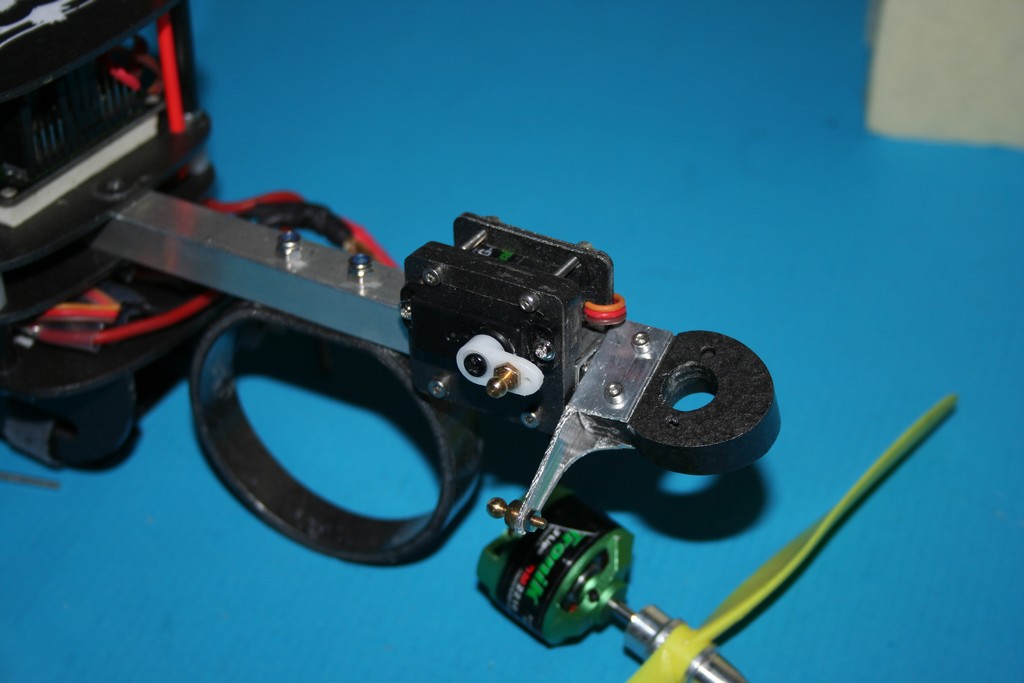
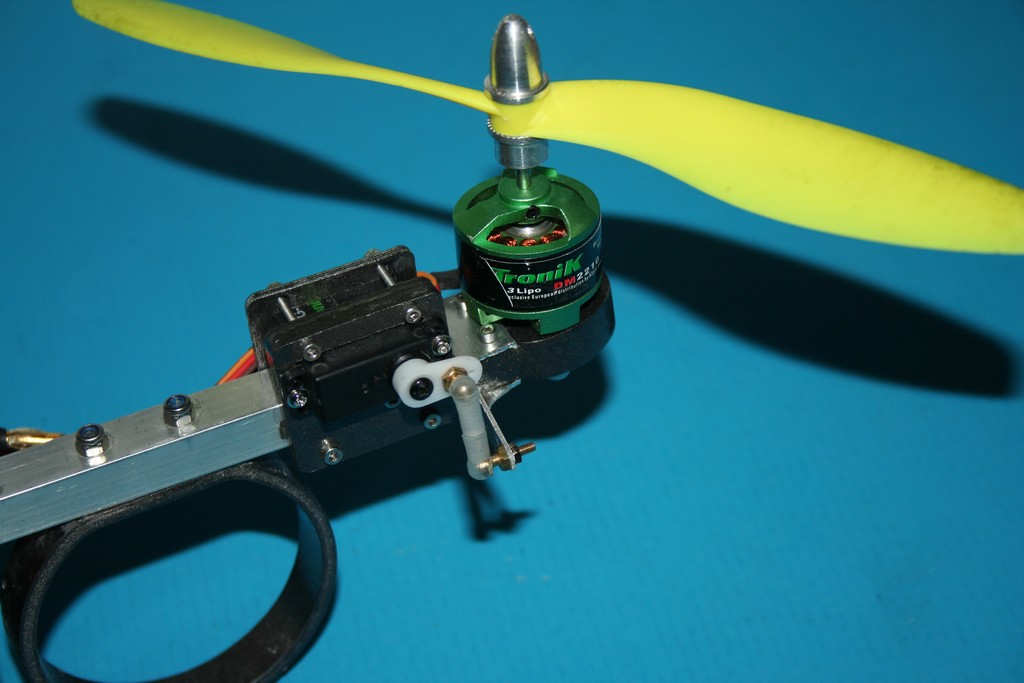
A l'arrière, le servo fixé sur la poutre
incline le moteur de quelques degrés vers la droite ou la gauche
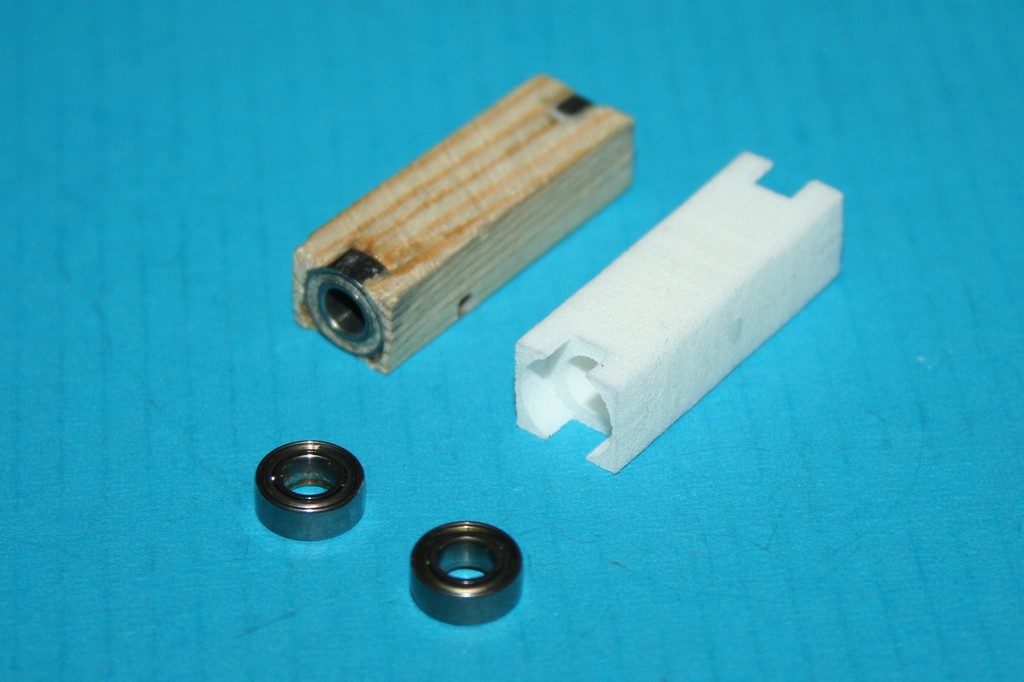
pour commander le lacet.
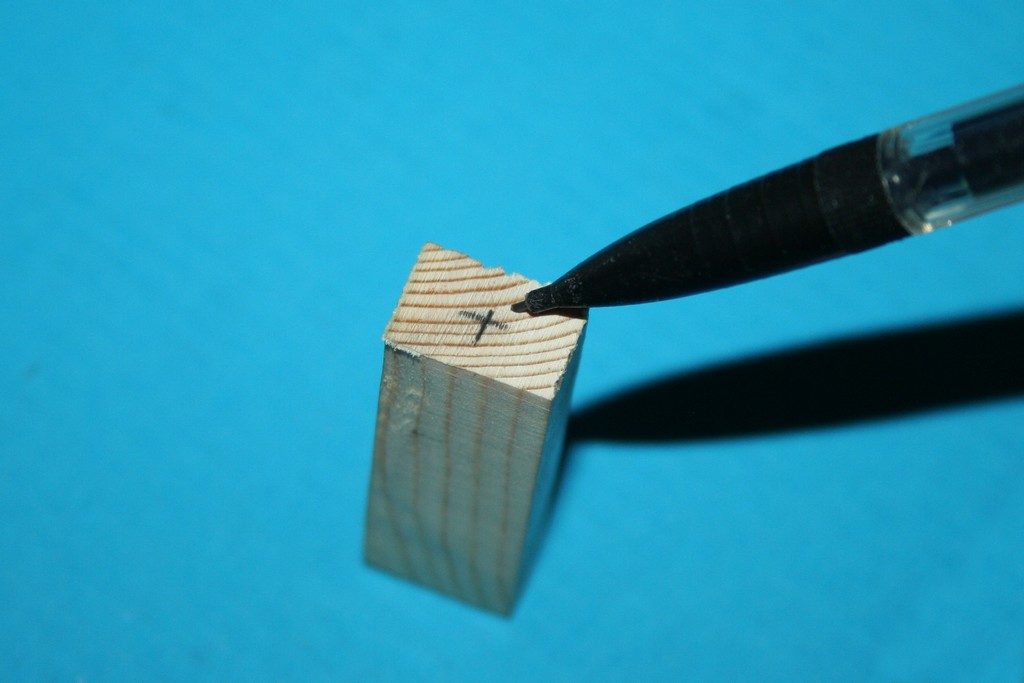
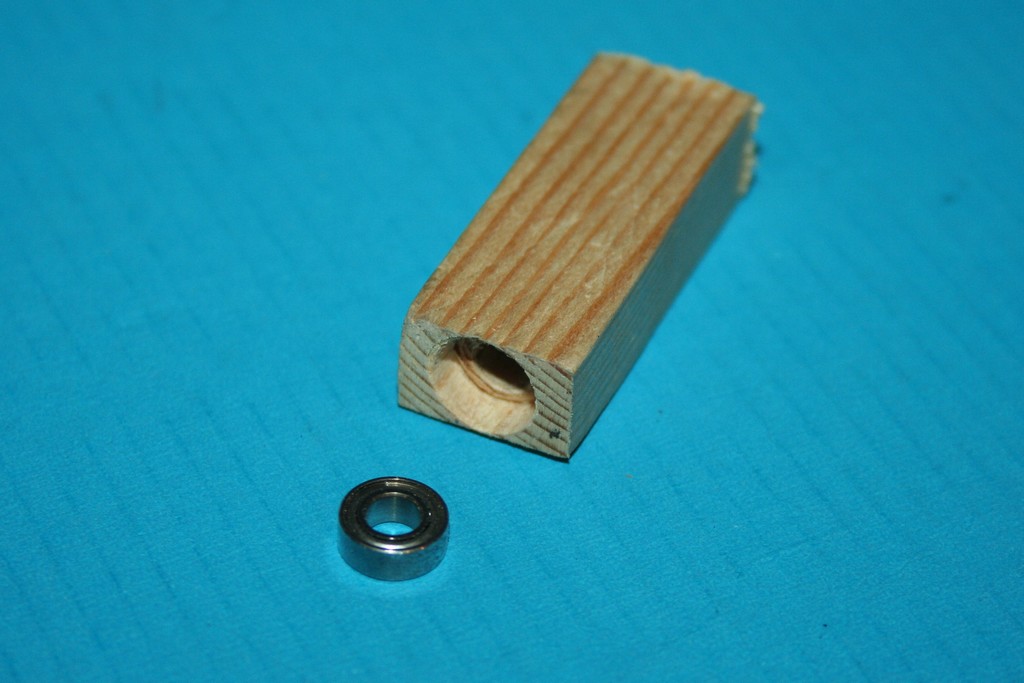
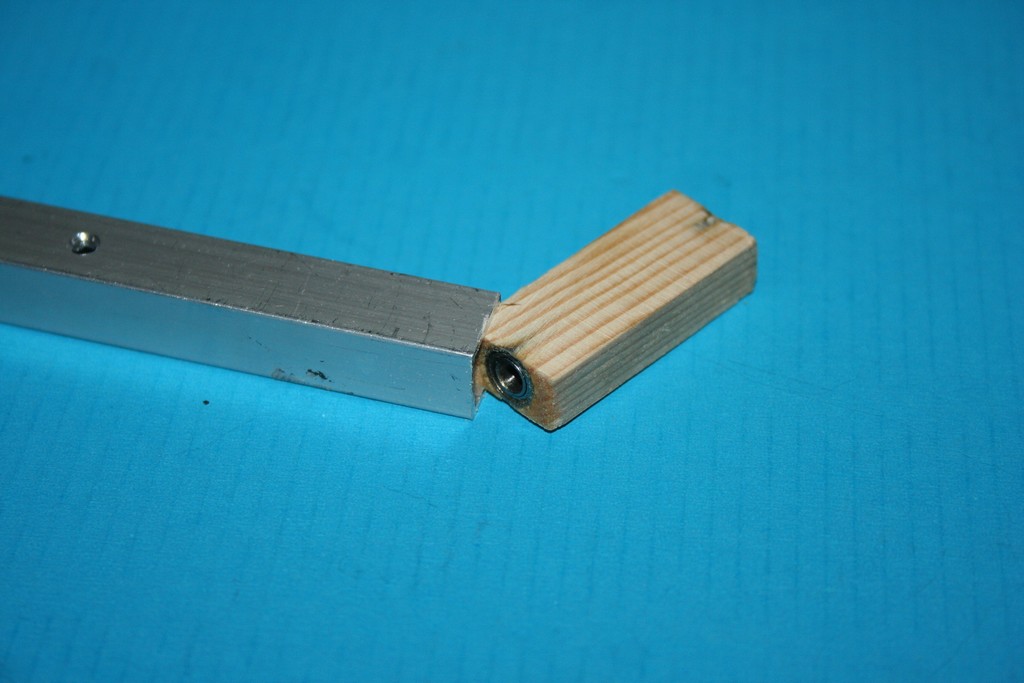
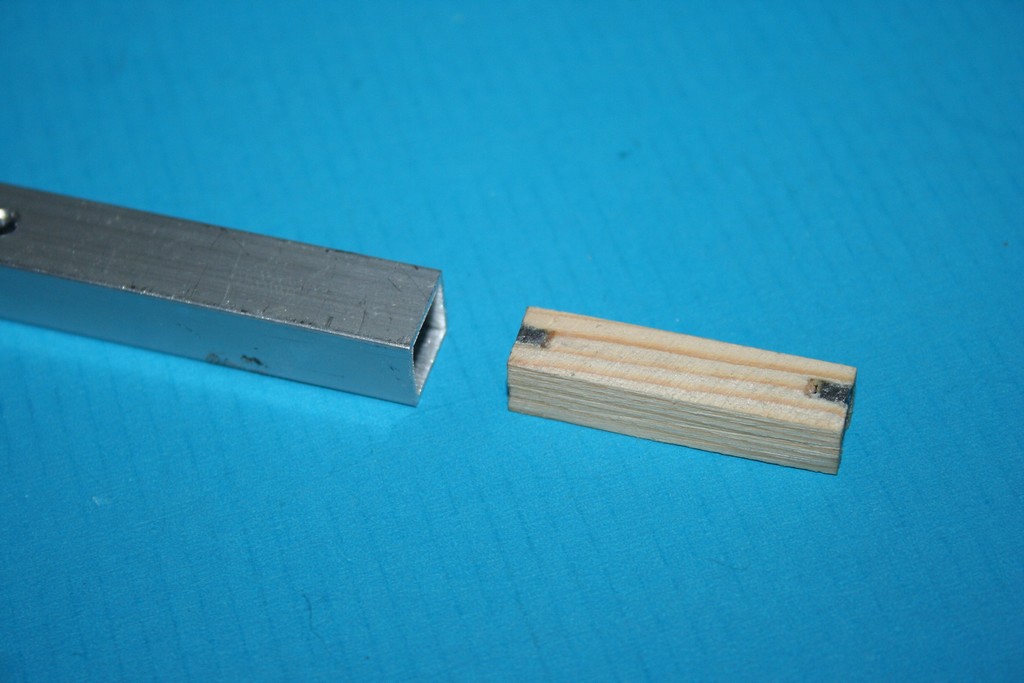
Une pièce rectangulaire est coupée dans une baguette de
bois dur, un peu plus grande que l'intérieur du profilé
alu. Elle est percée de part en part avec une mèche de
diamètre 5 mm, bien centrée, pour que le boulon qui sert
d'axe tourne librement dedans. A chaque extrémité de ce
tasseau, un épaulement de 4 mm de profondeur est réalisé
avec une mèche de 8 mm de diamètre pour y glisser les
roulements qui entrent en force. Elle est ensuite reponcée pour
un ajustage serré à l'intérieur du profilé
alu. Pour le plaisir (et quelques euros…), j'ai également
réalisé cette pièce en impression 3D qui ne demande
pas d'ajustage.
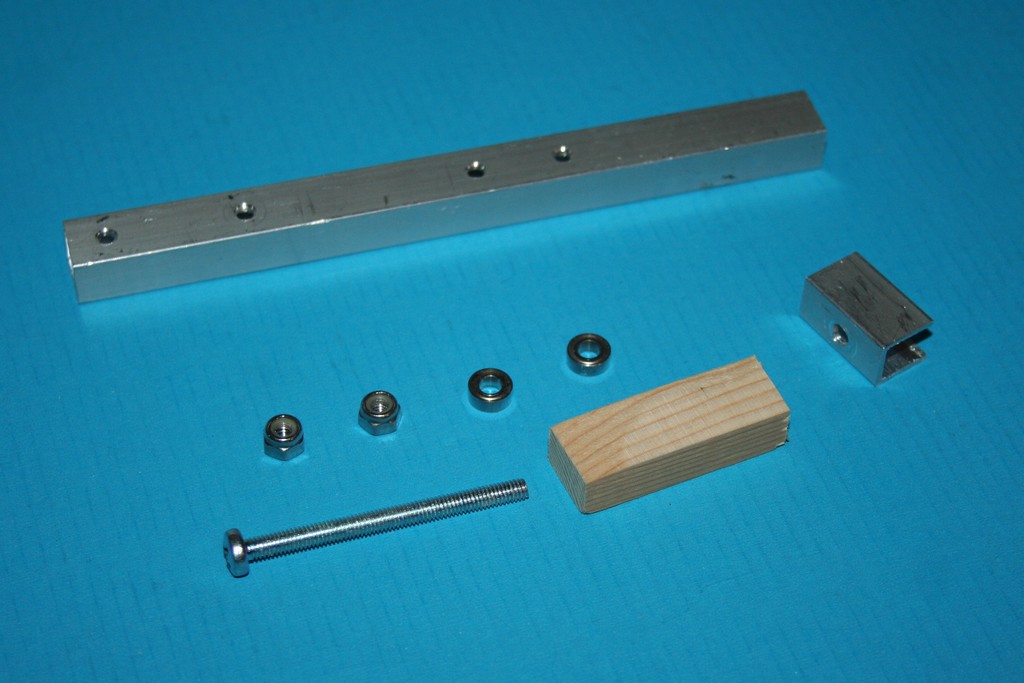
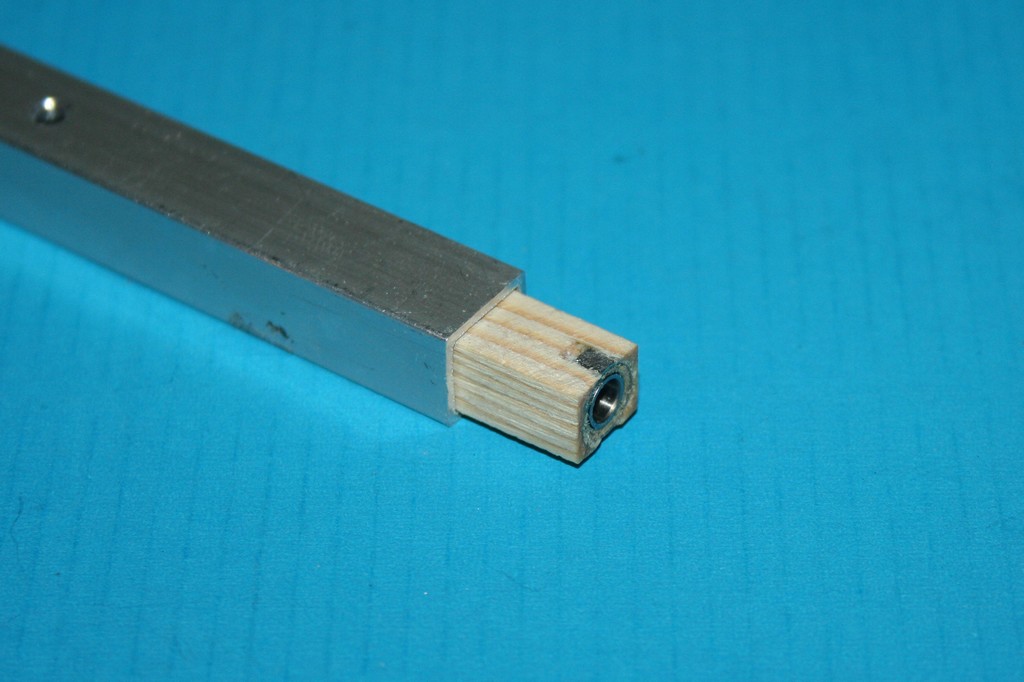
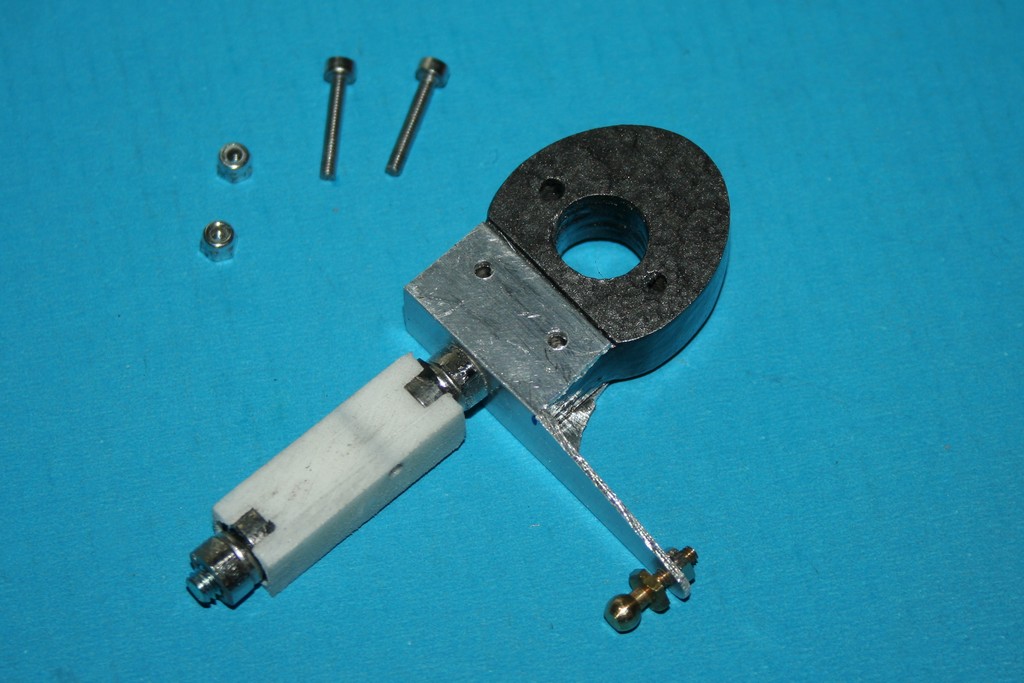
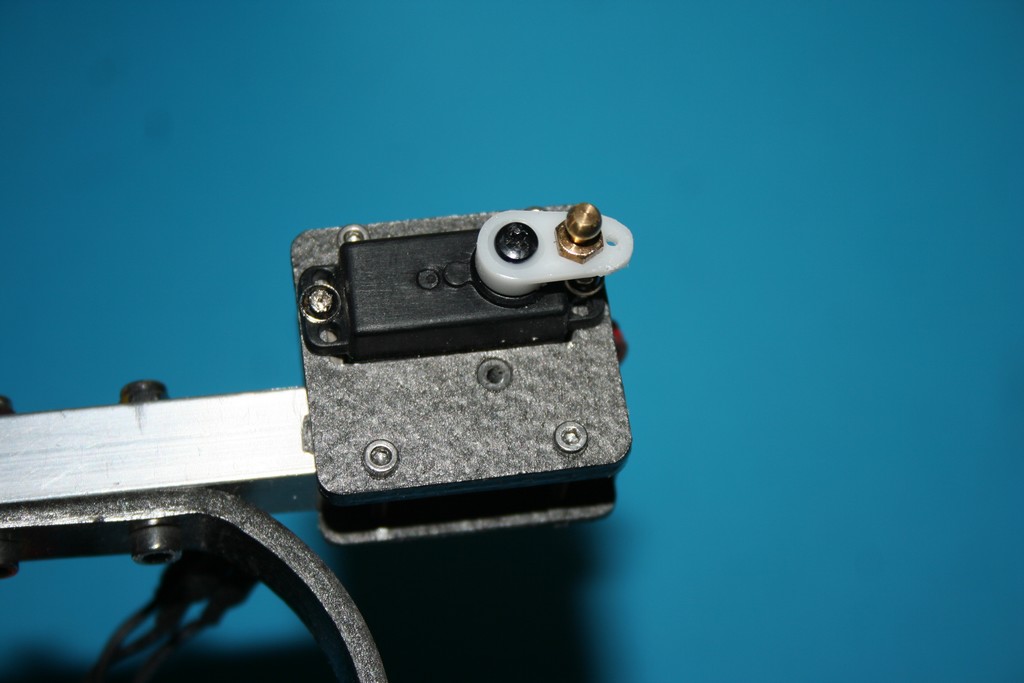
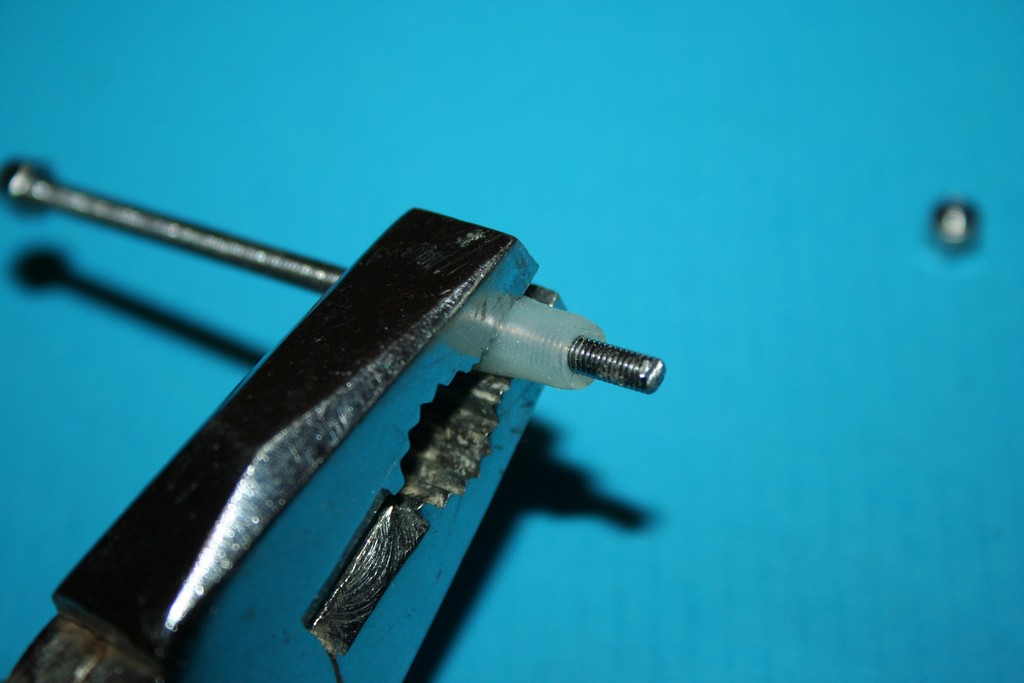
L'axe qui permet au support de pivoter
est un boulon de 4 mm, maintenu par deux roulements à billes
4x8x3 mm (4 mm de diamètre interne, 8 mm extérieur
et 3 mm d'épaisseur. Un bloc de bois dur maintient l'ensemble.
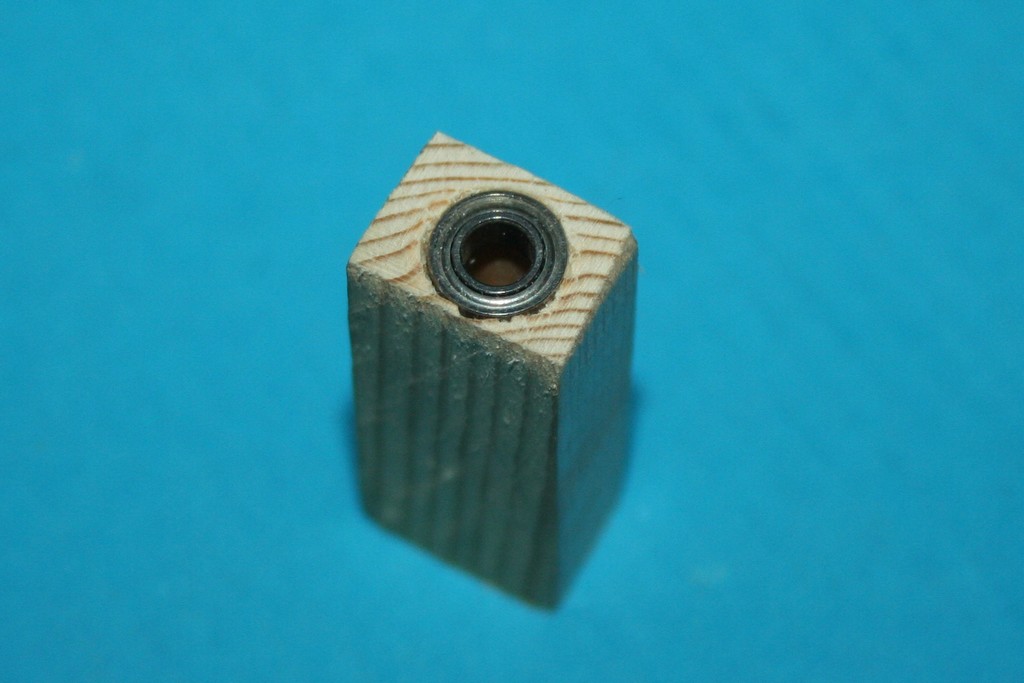
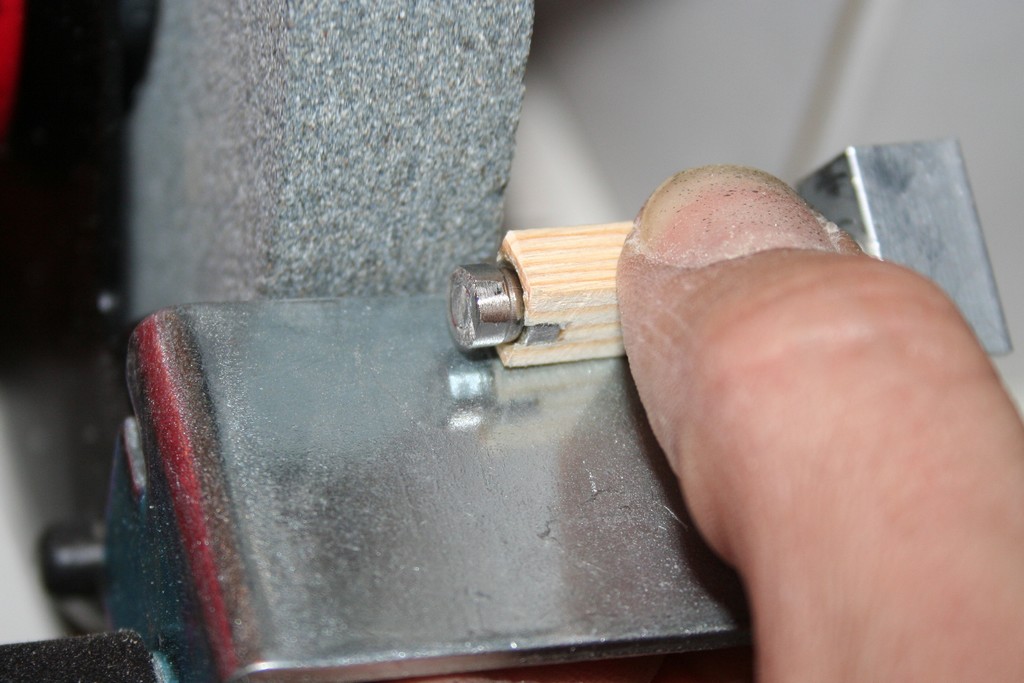
Le bloc de bois dur est percé
de part en part avec une mèche de 5 mm pour que le boulon
y tourne librement. A chaque extrémité, un épaulement
diamètre 8 mm est percé sur 3 mm de profondeur pour
recevoir les roulements.
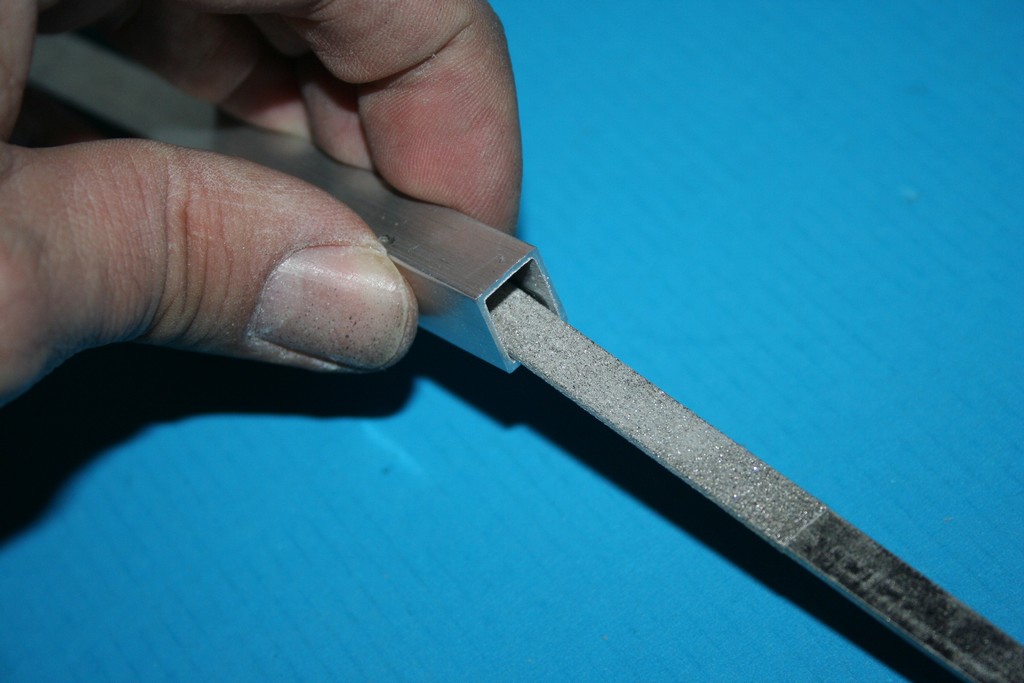
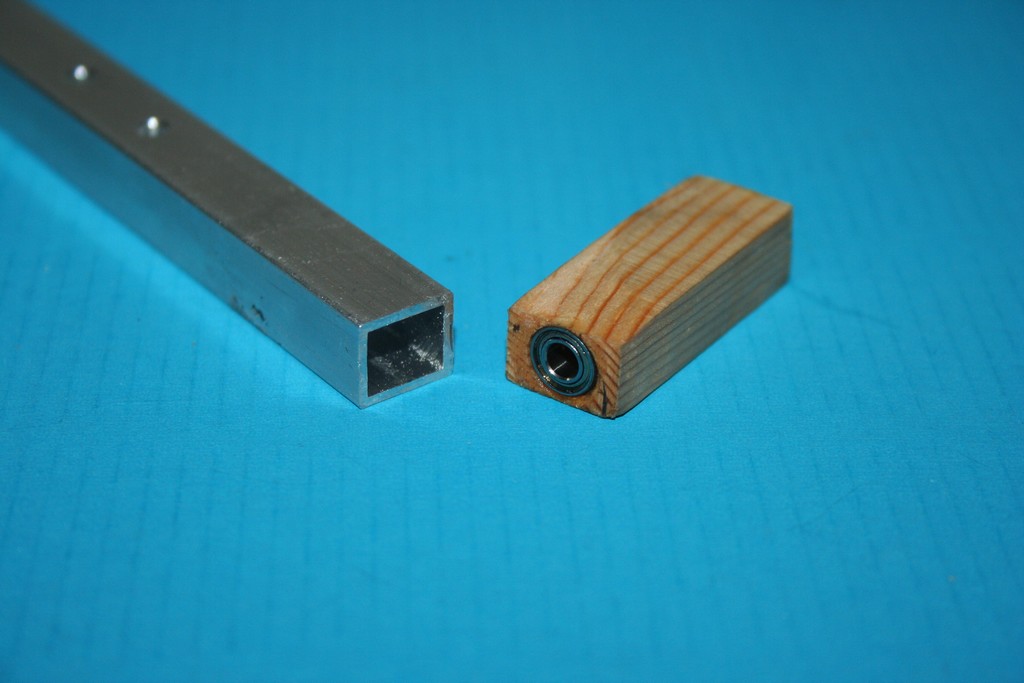
La baguette est recalibrée par
ponçage pour obtenir un ajustage serré à l'intérieur
du profilé alu. Bien ébavurer les bords, surtout à
l'intérieur.
Le porte-roulements blanc visible ici
a été dessiné avec le programme de modélisation
volumique Sketchup et imprimé en 3D par frittage de poudre
mais n’apporte rien par rapport à la version en bois.
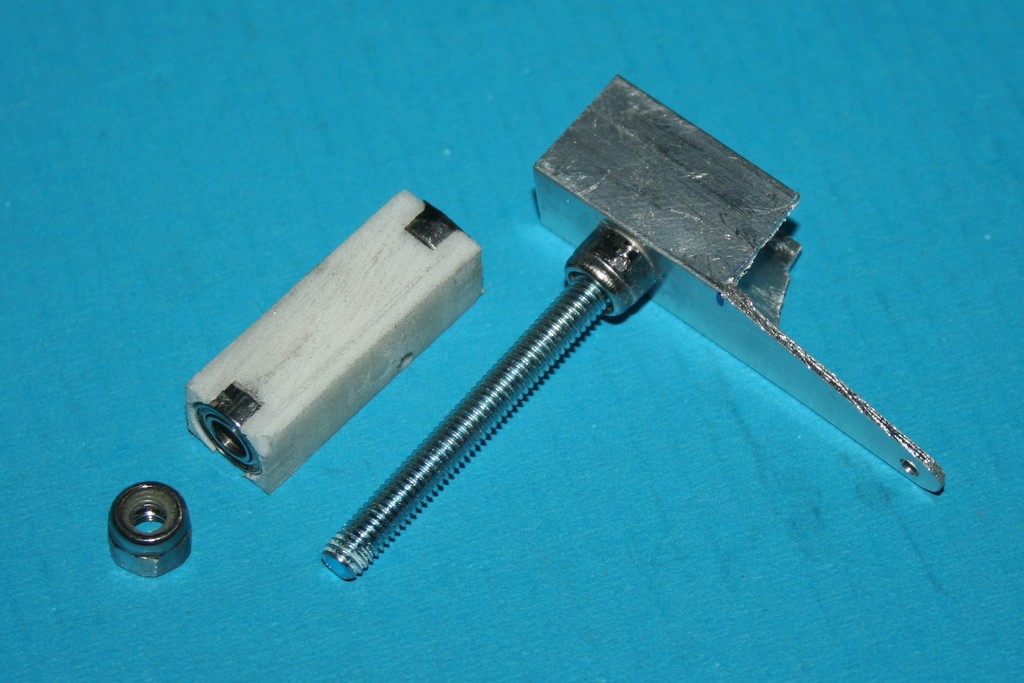
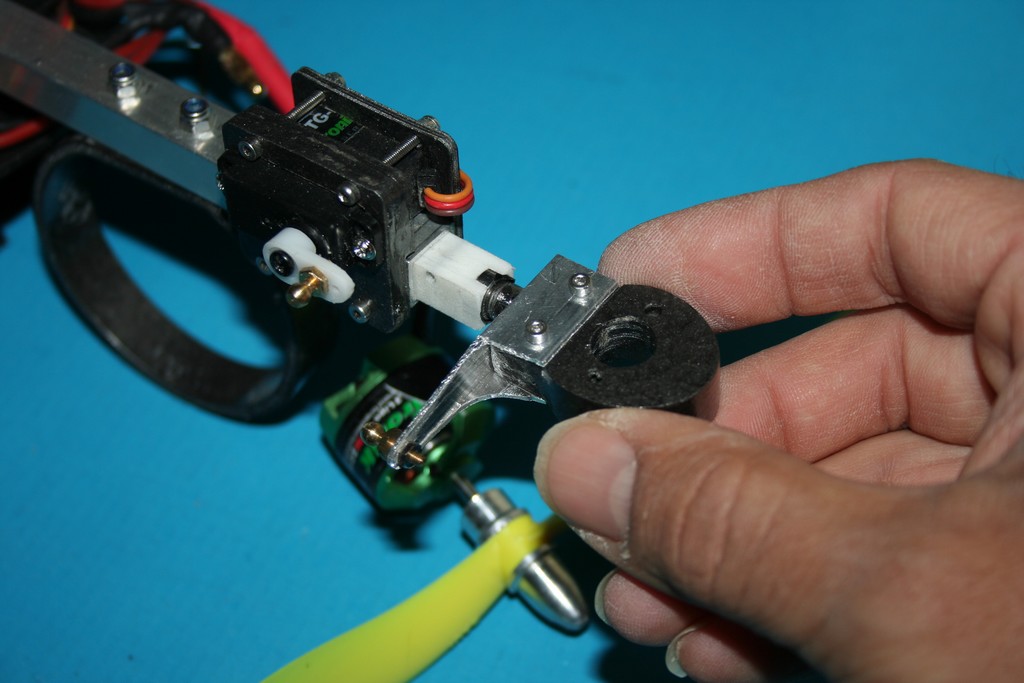
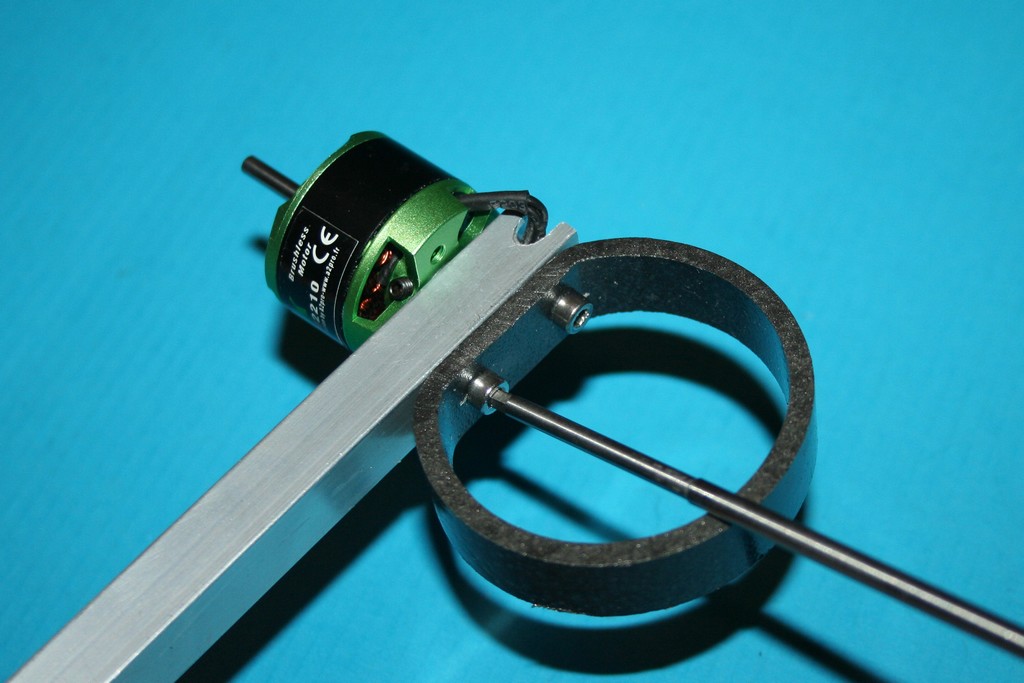
Le moteur est monté sur un sandwich de rondelles
en contre-plaqué 1 et 2 mm, formant une épaisseur totale
de 10 mm. Côté axe, l'épaisseur n'est que de 8 mm,
ce qui correspond à l’écartement du profilé
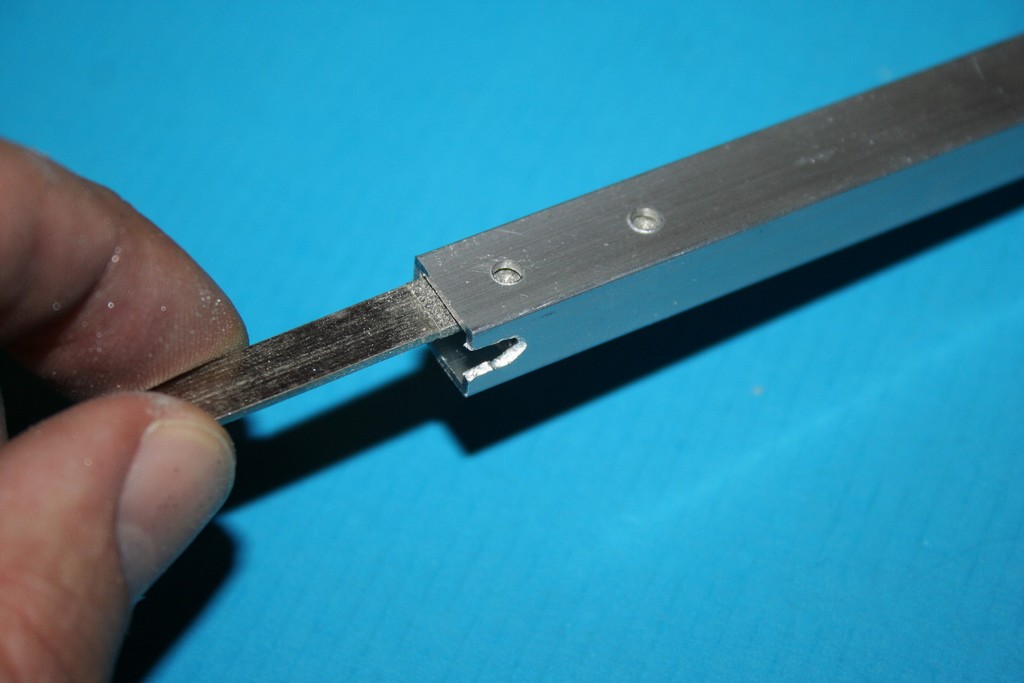
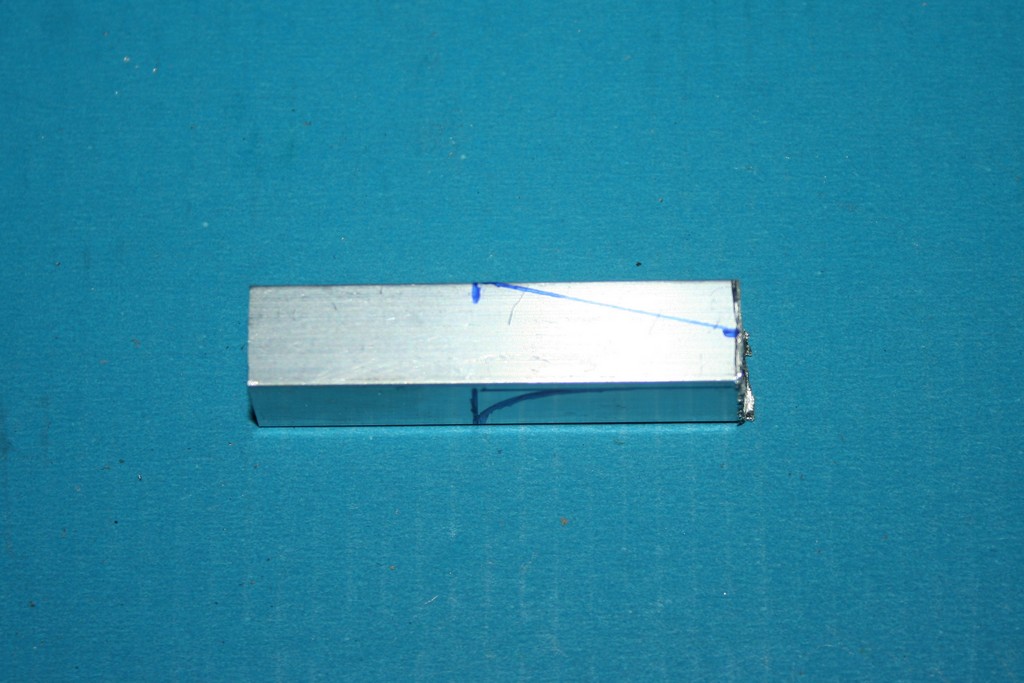
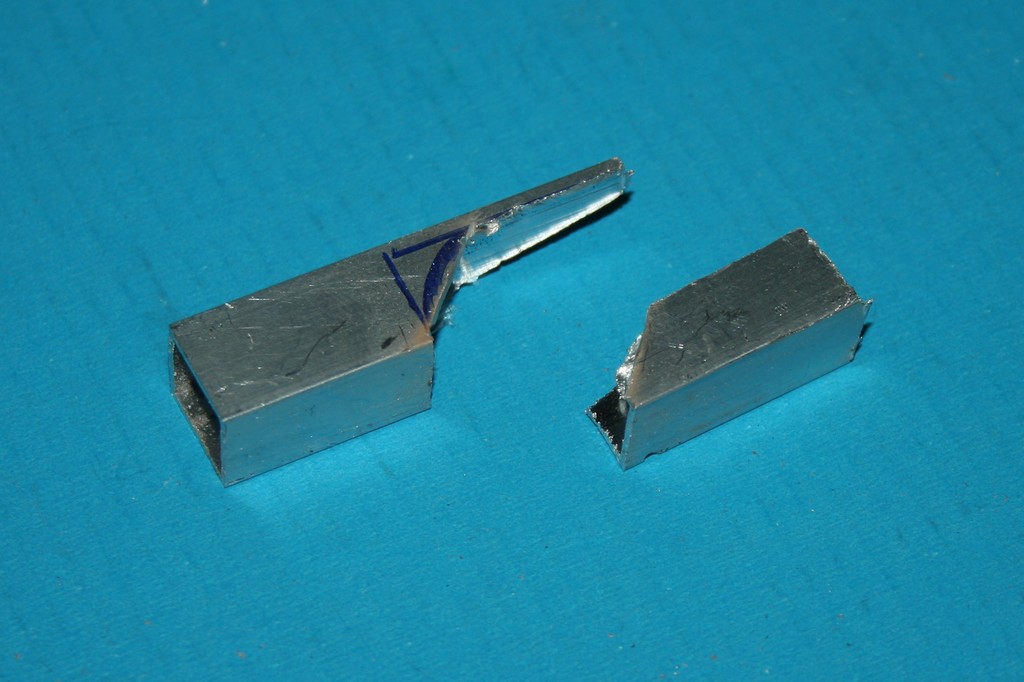
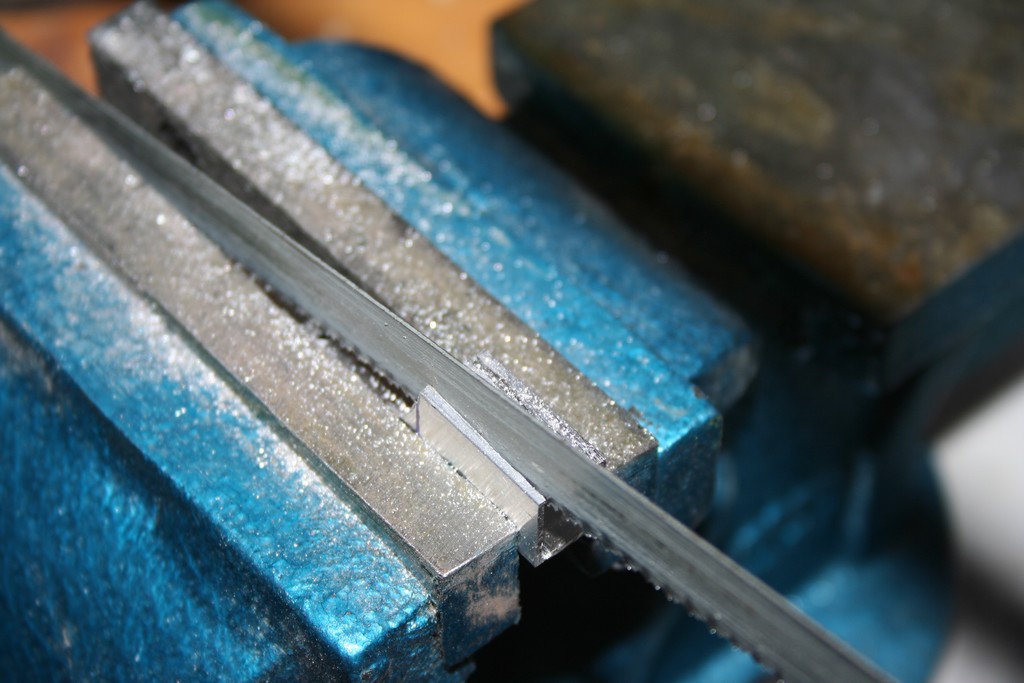
alu fendu pour obtenir un « U ». Ce profilé coupé
à la scie à métaux et lissé à la
lime est taillé en biseau d'un côté afin de former
le guignol.
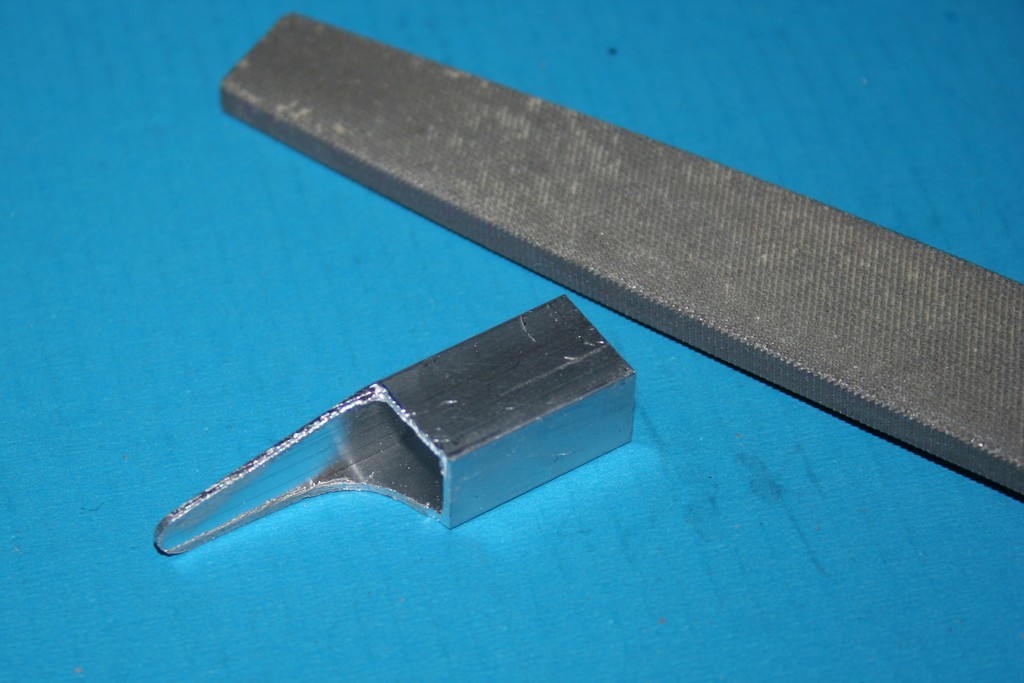
Un tronçon de profilé sera
utilisé pour pincer le support moteur. Sa forme est particulière
puisqu'une de ses extrémités est façonnée
pour former le guignol.
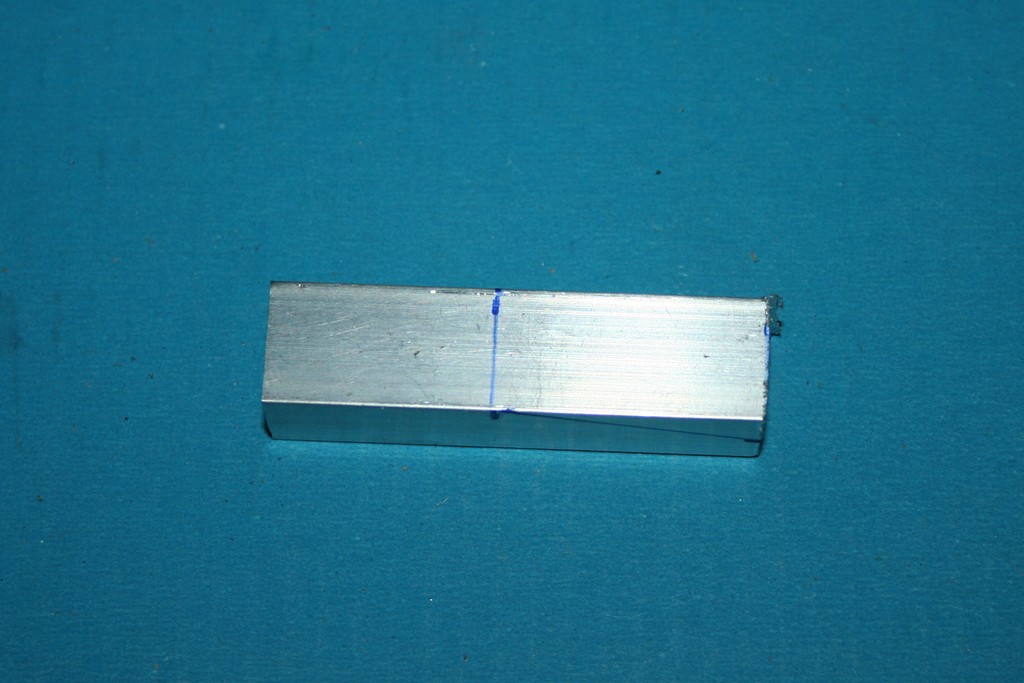
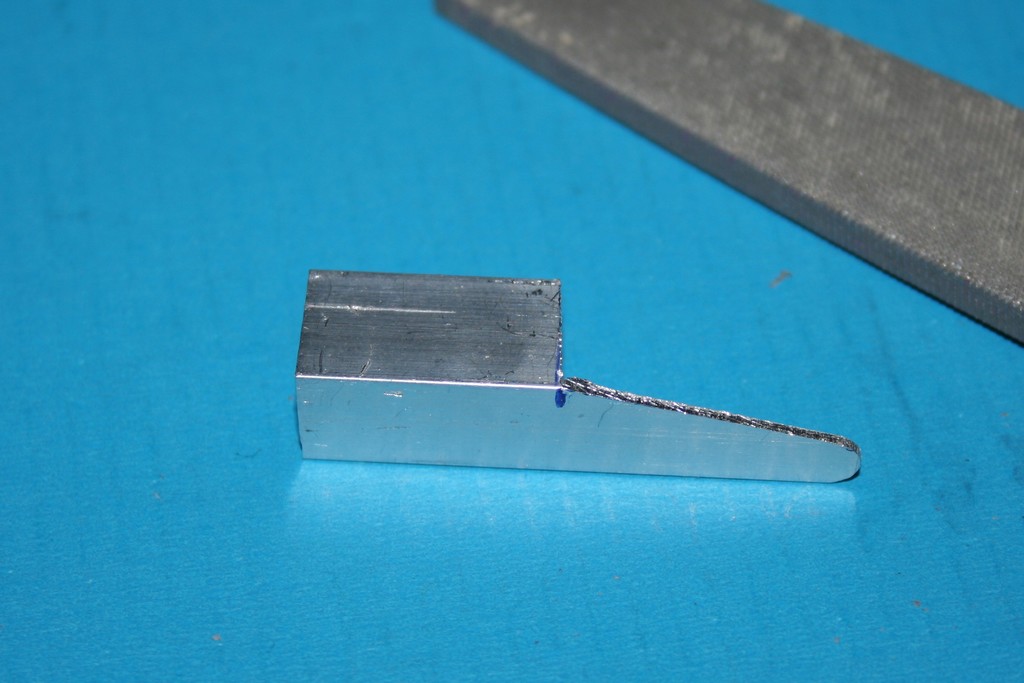
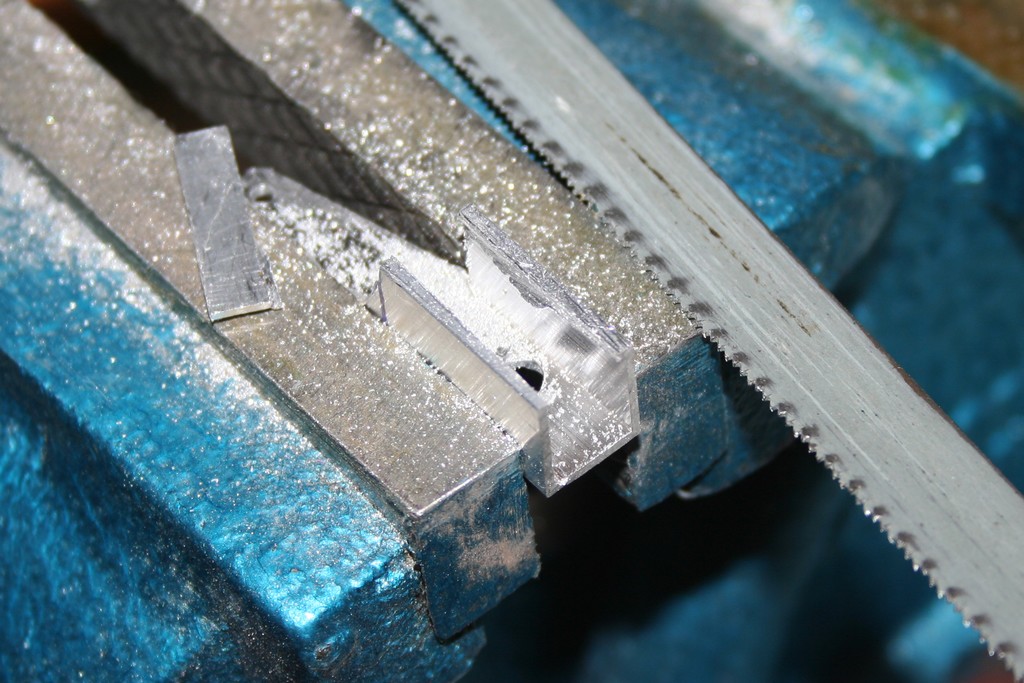
Quelques perçages et découpes
sont nécessaires pour lui donner sa forme définitive.
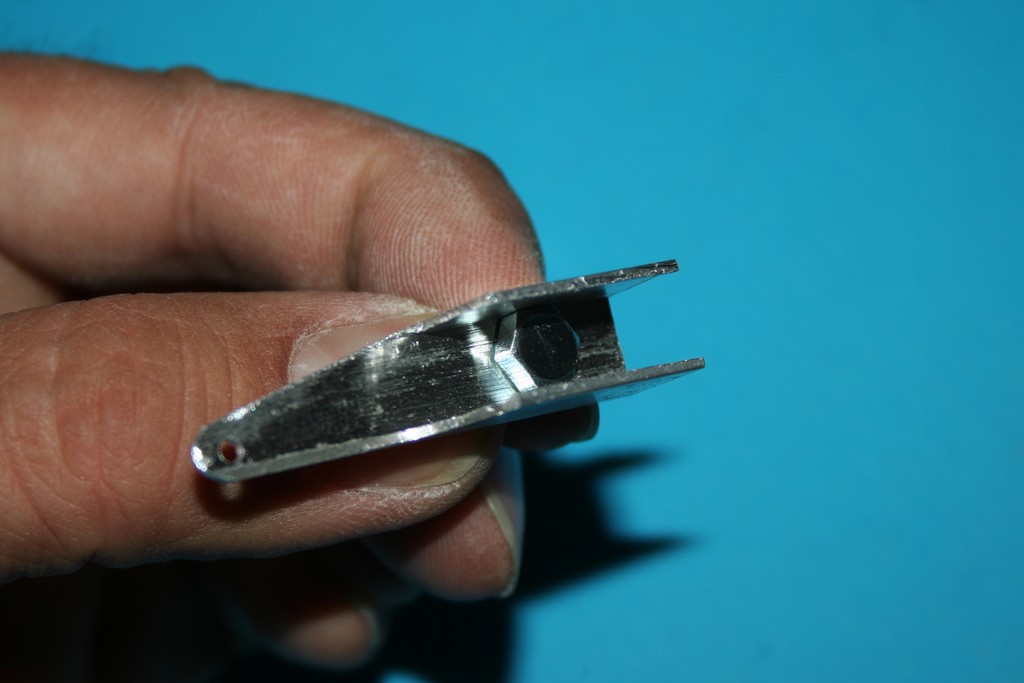
Le trou pour l'axe d'articulation est légèrement décentré.
La tête de vis 6 pans viendra ainsi en butée à
l'intérieur.
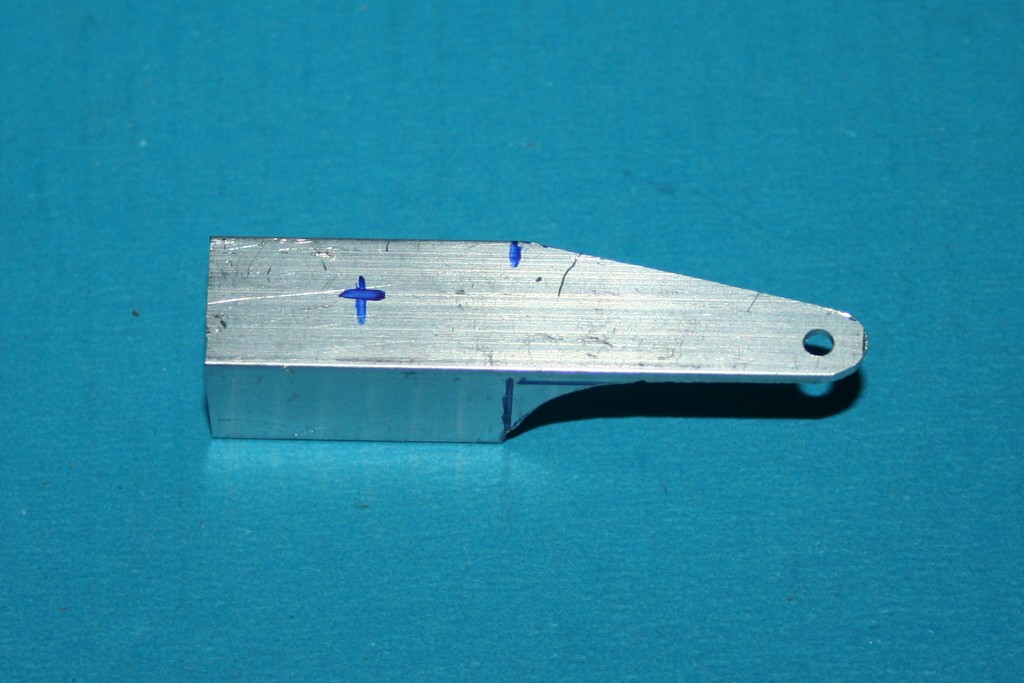
Les angles de l'écrou
nylstop peuvent être arrondis pour afin de ne pas frotter
à l'intérieur du tube. Un trou est percé à
travers le tout, à environ 1 mm de la surface supérieure
afin que la vis servant de goupille et verrouillant l’ensemble
ne vienne pas frotter sur l’axe.
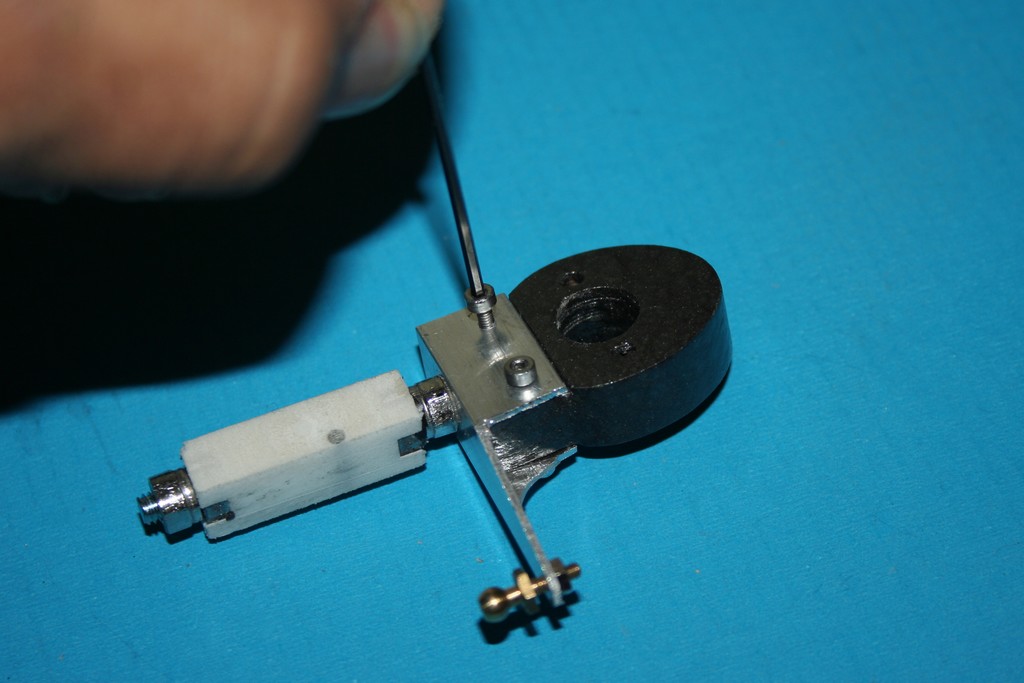
Le trou pour passer l'axe est très légèrement
décentré, de façon à ce que la tête
hexagonale du boulon qui sert d'axe vienne en appui à l'intérieur
sans pouvoir tourner. L'entretoise sur roulements est emprisonnée
entre deux écrous nylstop. Ce montage est glissé dans
le tube puis un trou de 2 mm est percé dans le haut, de part
en part, afin de glisser un boulon de 2 mm qui le verrouille en place
comme une goupille, et qu'il suffit de retirer pour une éventuelle
maintenance.
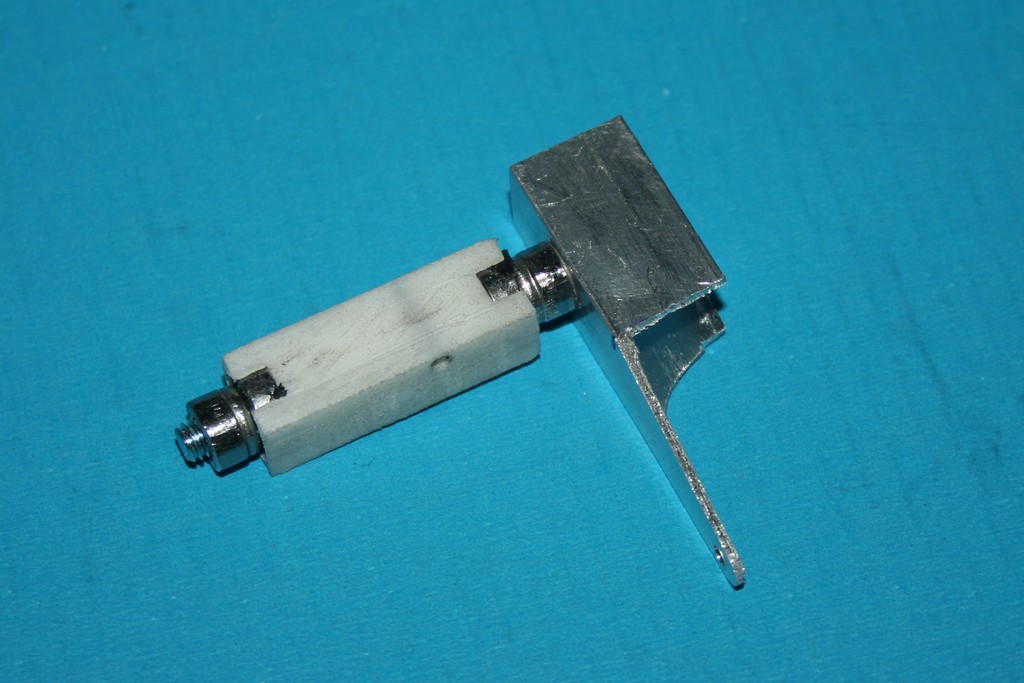
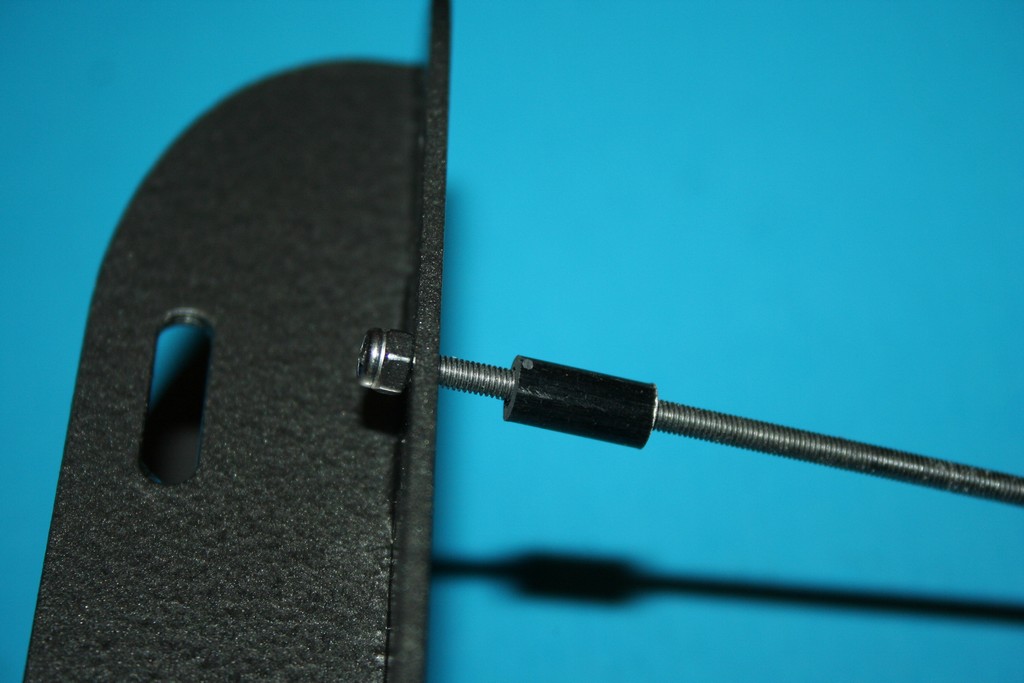
L’axe est un boulon de 4 mm à
tête hexagonale qui emprisonnera le support en alu et le porte-roulements.
Il est glissé dans le U en alu. Une de ses faces vient en
appui à l'intérieur du U, ce qui l’empêche
de tourner librement. Il est ensuite bloqué au moyen d'un
écrou nylstop. Le support de roulements est ensuite glissé
et bloqué avec un autre écrou nylstop. Il ne faut
pas trop serrer le dernier écrou afin que l’ensemble
puisse tourner sans forcer.
Le support moteur en contre-plaqué
entre en force dans le U en alu. Ensuite, deux trous de 2 mm sont
percés de part en part pour y glisser les deux boulons de
2 mm qui solidarisent l'ensemble.
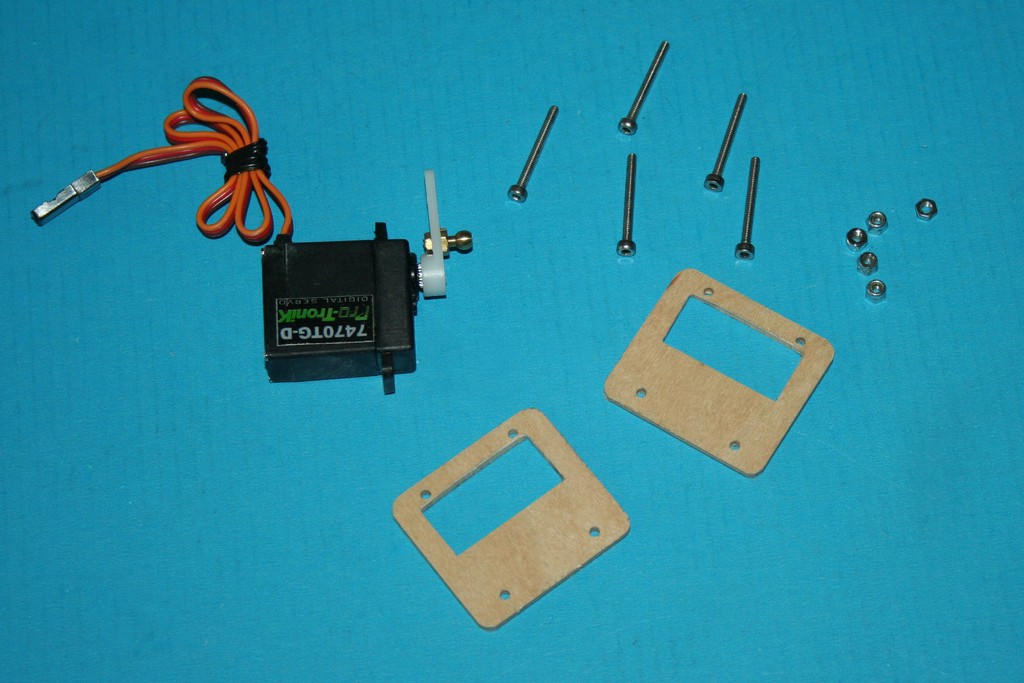
Support
de servo
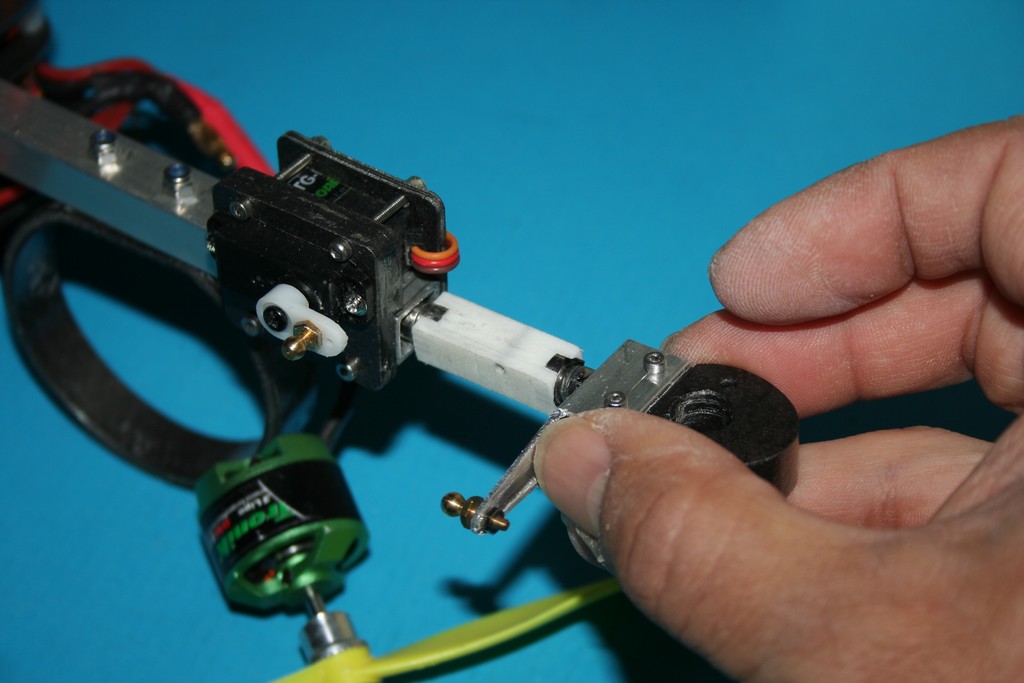
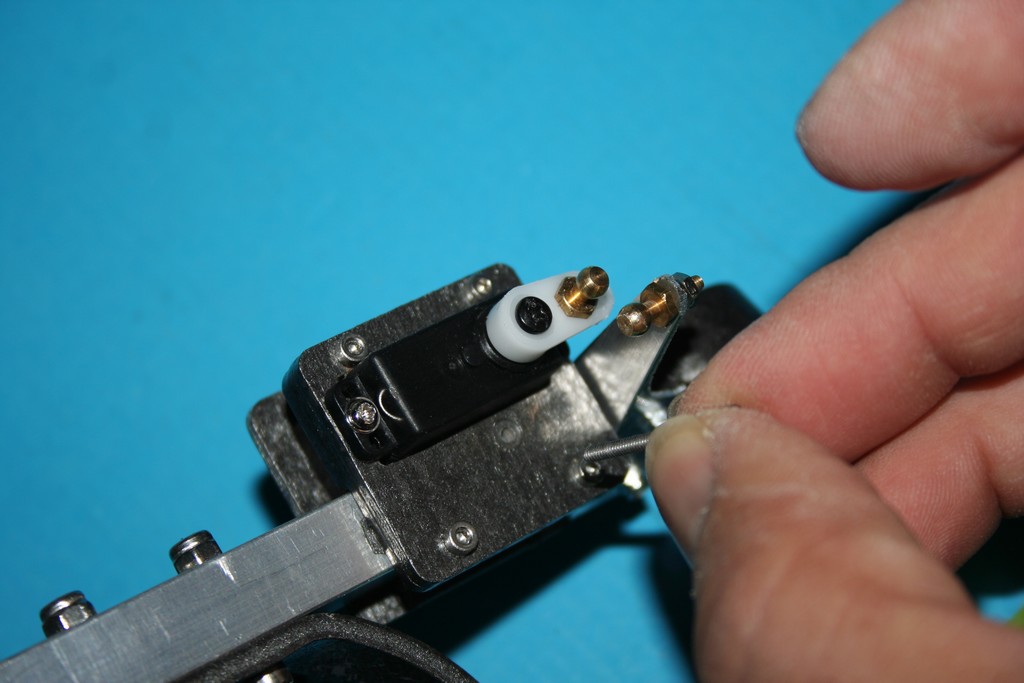
Le servo est monté sur deux cadres en contre-plaqué.
Le palonnier est très court car il faut peu de débattements.
Il est raccordé au guignol avec deux chapes à boules raccourcies
en longueur, réunies par un morceau de tige filetée.
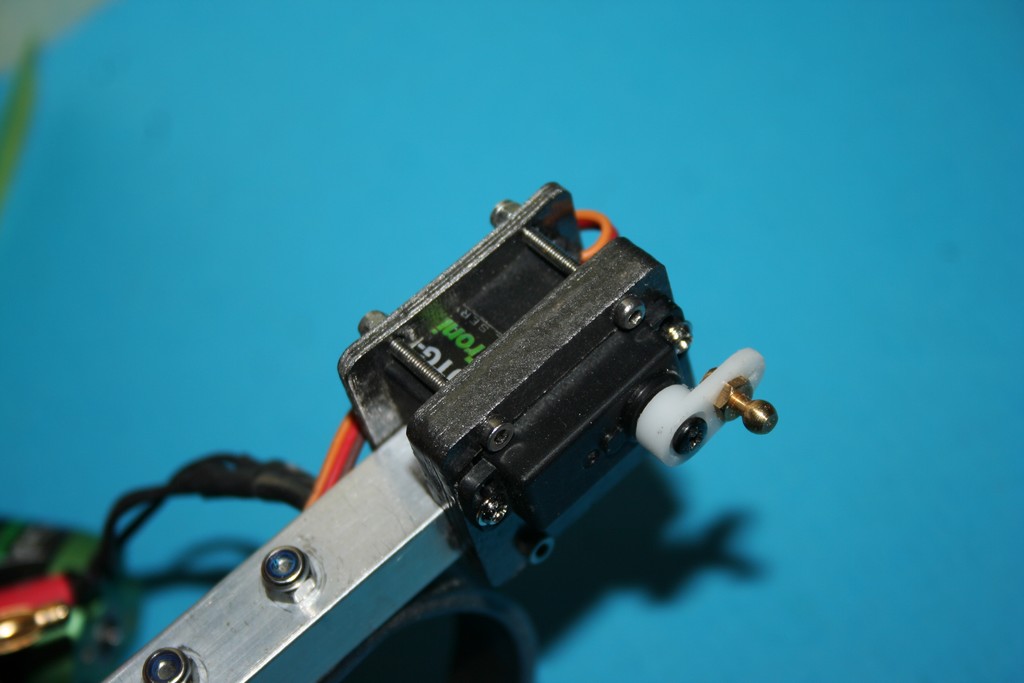
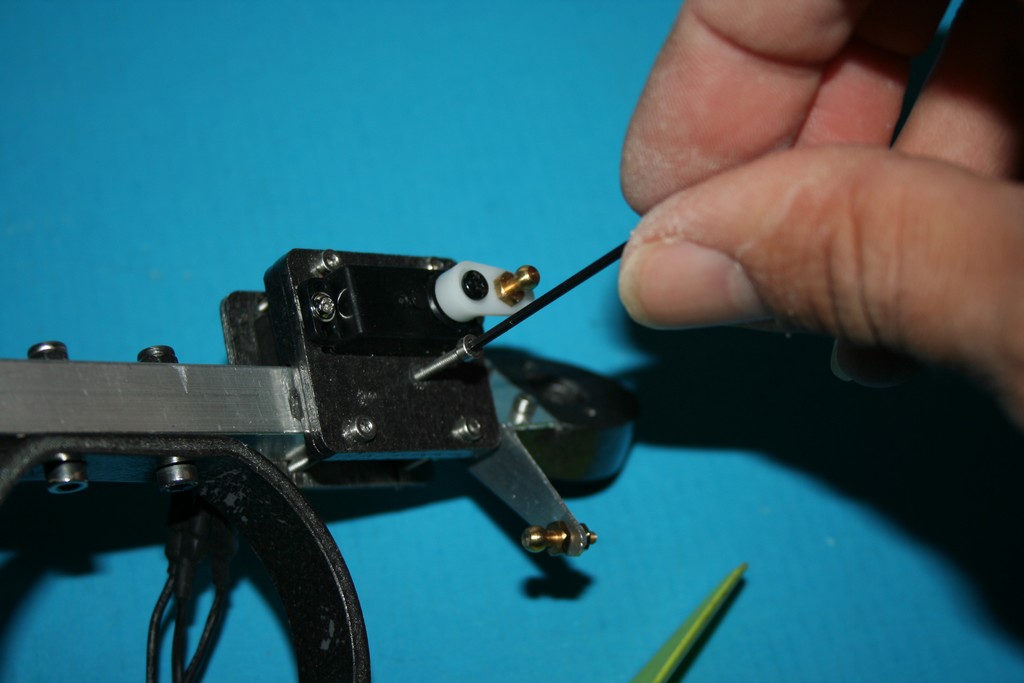
Le servo est glissé entre les deux
cloisons verticales qui emprisonnent également la poutre.
Les fils sont passés à l’intérieur, avec
ceux du moteur, en laissant un peu de mou.
Le support moteur est glissé à
l’intérieur du bras, en s’assurant que le trou
pour la goupille est placé dans le bon sens.
Le verrouillage du support moteur empêche
aussi le glissement du servo, grâce au boulon de 2 mm qui
passe à travers le tout.
La commande très courte est réalisée
avec deux chapes à boules recoupées dans la longueur.
Elles sont réunies par un petit morceau de tige filetée.
Train
d'atterrissage
Les patins son issus d'un tube de canalisation de
63 mm de diamètre, en PVC. Ils sont solides, sont fixés
par les mêmes vis qui tiennent les moteurs et ne se plantent pas
dans le sol.
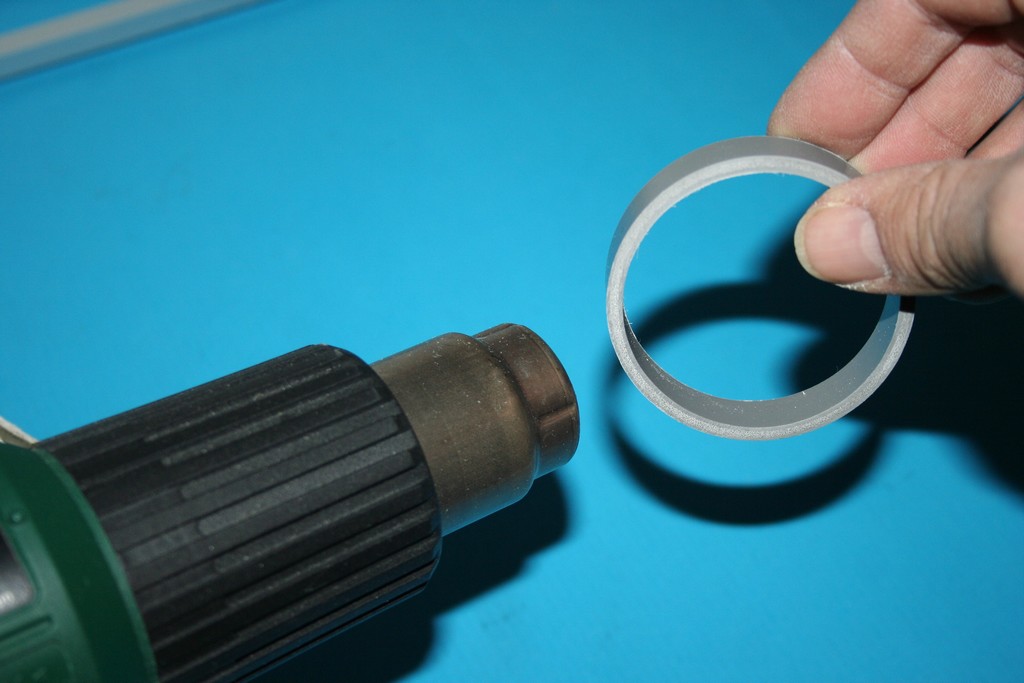
Les patins sont issus d’un tube de canalisation
en PVC, tronçonné en anneaux de 12 mm de large.
Pour faire disparaître les dents de scie, la
tranche est poncée bien d’équerre.
On chauffe - à peine - au
décapeur thermique un des côté pour assouplir
le matériau.
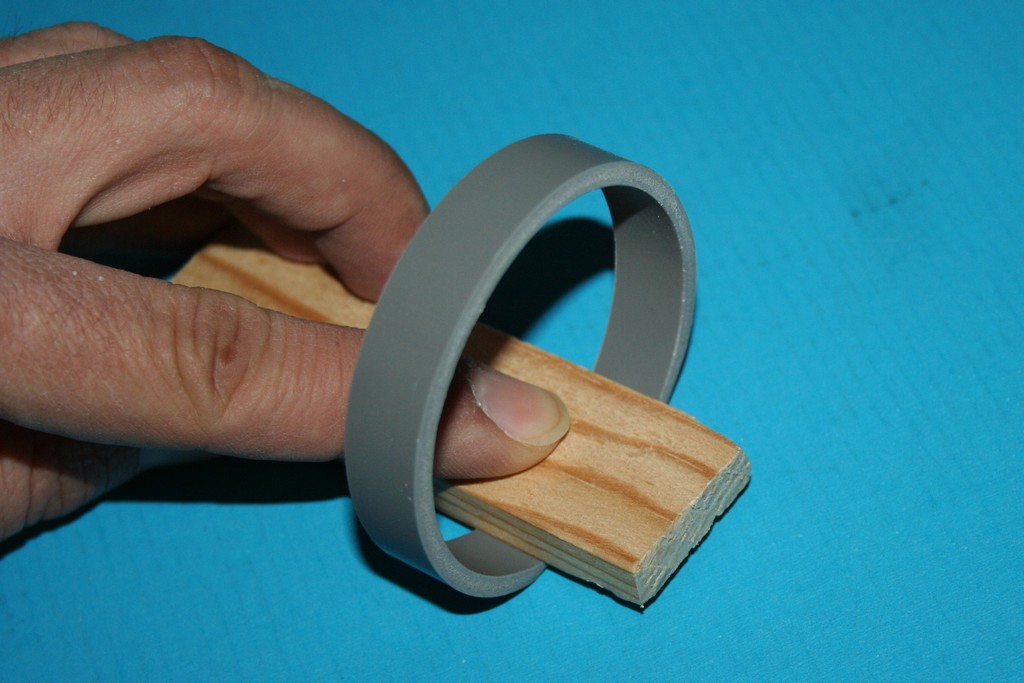
Dès que l’anneau
se déforme, on le plaque à l’aide d’un
morceau de bois sur le chantier et on laisse refroidir.
L’assise plate viendra se
plaquer sous les poutres. Pour le perçage, on utilise le
gabarit en bois réalisé précédemment.
Des rondelles de 12 mm de large sont tronçonnées
dans le tube puis chauffées très brièvement d'un
côté. Quelques secondes suffisent pour les assouplir sans
dégrader les qualités du plastique. Lorsqu'on a l'impression
visuellement que le plastique se dilate, on arrête de chauffer.
Il suffit alors d'aplanir le cercle à l'aide d'un petit tasseau
de bois et de laisser refroidir.
Par temps froid ou lors de violents retours au sol, on arrive à
les casser. Ils font alors fusibles sans endommager le châssis.
On les remplace en quelques instants après avoir desserré
les 2 vis de fixation, si on a pris soir d'en réaliser comme
pièces de rechange dès le départ.
Assemblage
du châssis
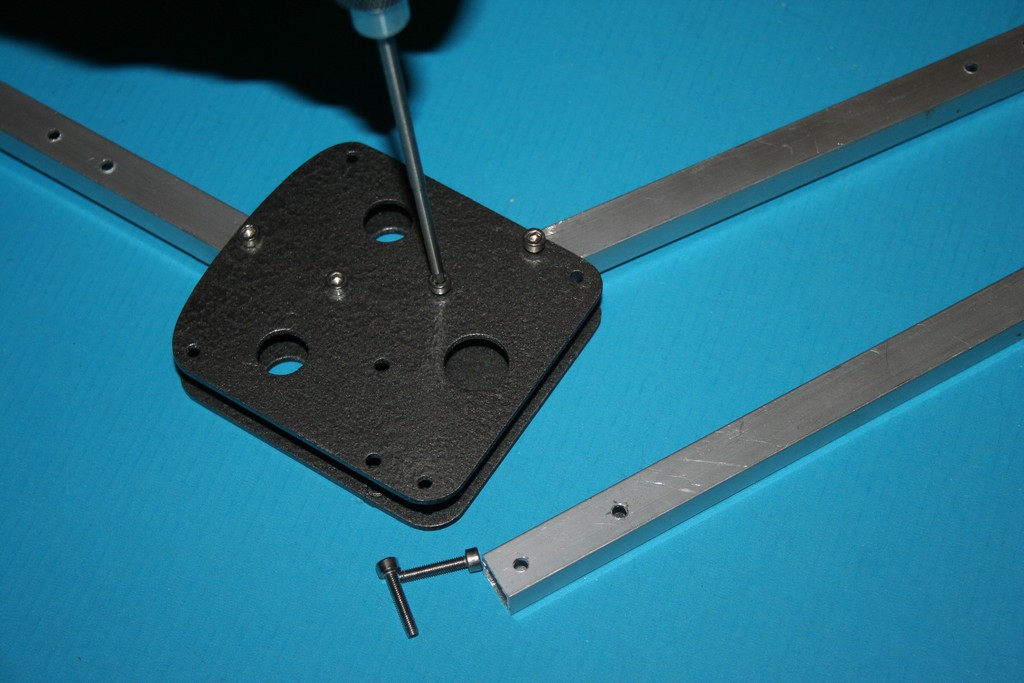
Les bras
sont pincés entre les deux platines centrales, avec des
boulons de 3 mm qui se vissent dans les inserts filetés. Ce trident forme la partie la plus robuste
du châssis. Les deux bras les plus longs sont placés
vers l’avant.
Cet ensemble de tiges filetées
et de tubes en carbone sert à réunir les différentes
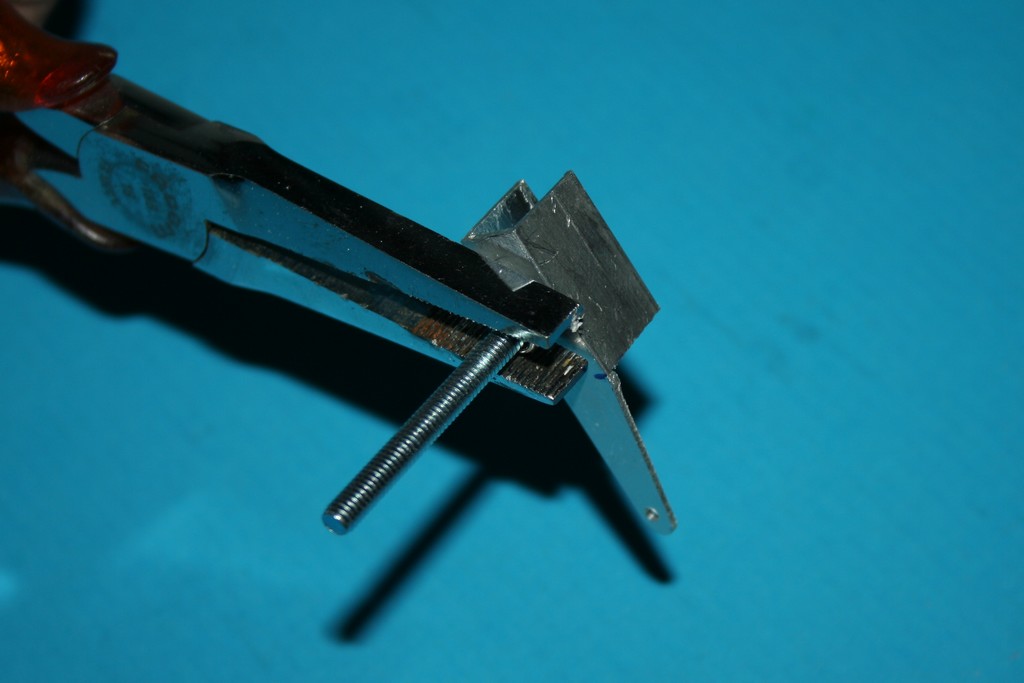
platines en contre-plaqué.
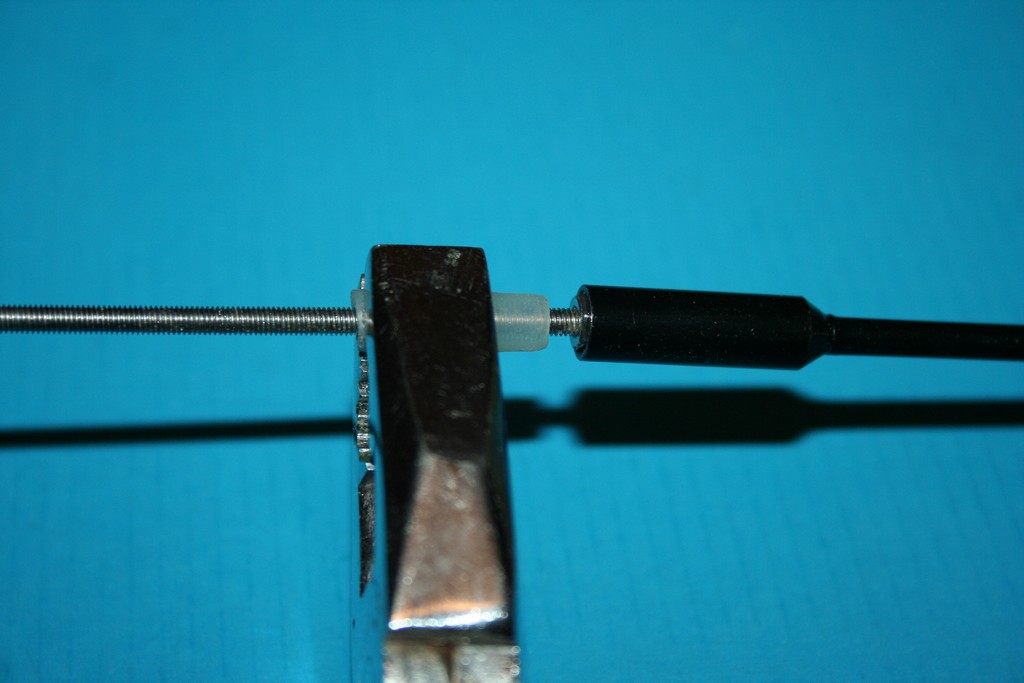
Dans le but de ne pas endommager le filetage
en serrant avec la pince, un morceau de durit est glissé
entre la pince et la tige filetée lors du montage.
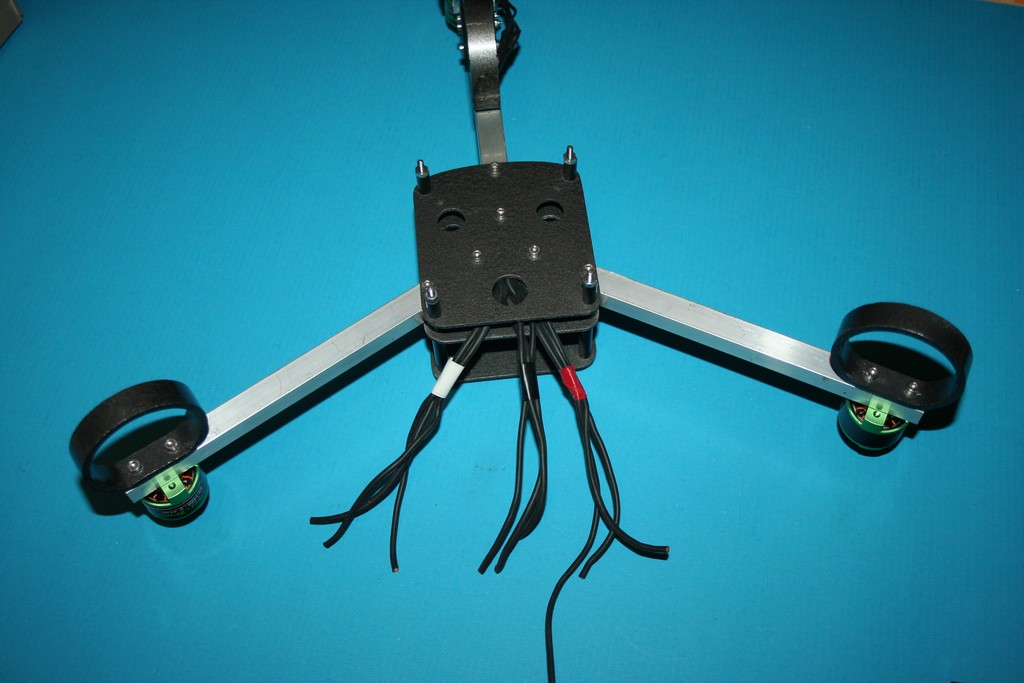
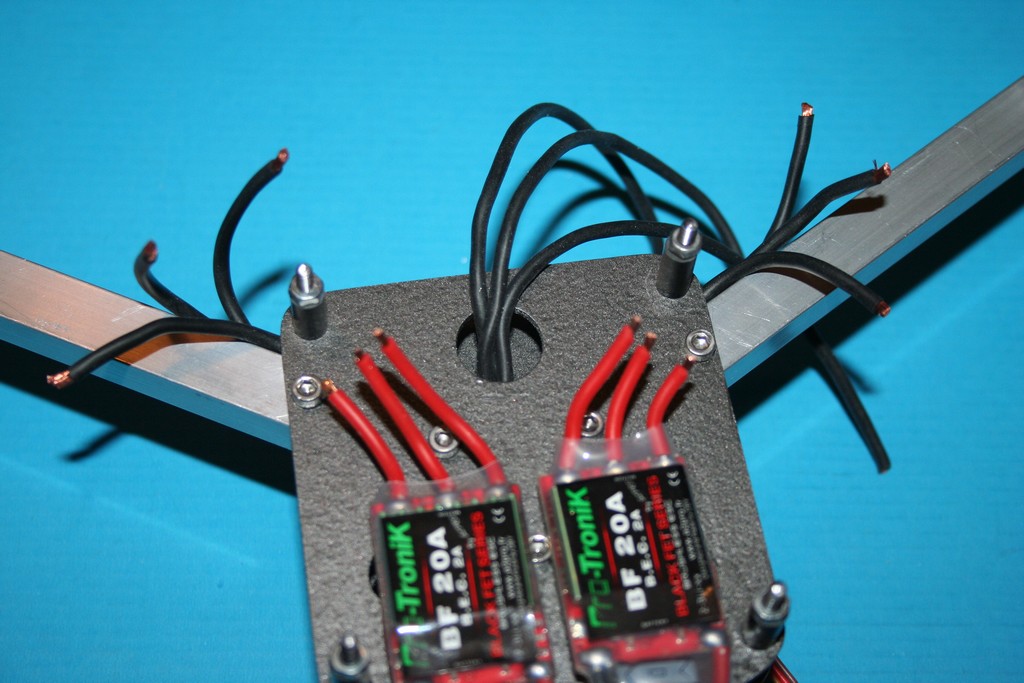
Equipements
Les câbles
électriques des moteurs sont glissés dans les bras
jusqu’au centre du châssis. Ils doivent être
identifiés avant de commencer les soudures.
A l’avant, les
patins sont maintenus avec les mêmes vis que les moteurs.
Pour l’arrière, ce sont deux vis indépendantes.
Attention à ne pas abîmer le câblage lors du
passage des vis de fixation des moteurs. Si les profilés
ont été manchonnés, il n'y aura pas de problème.
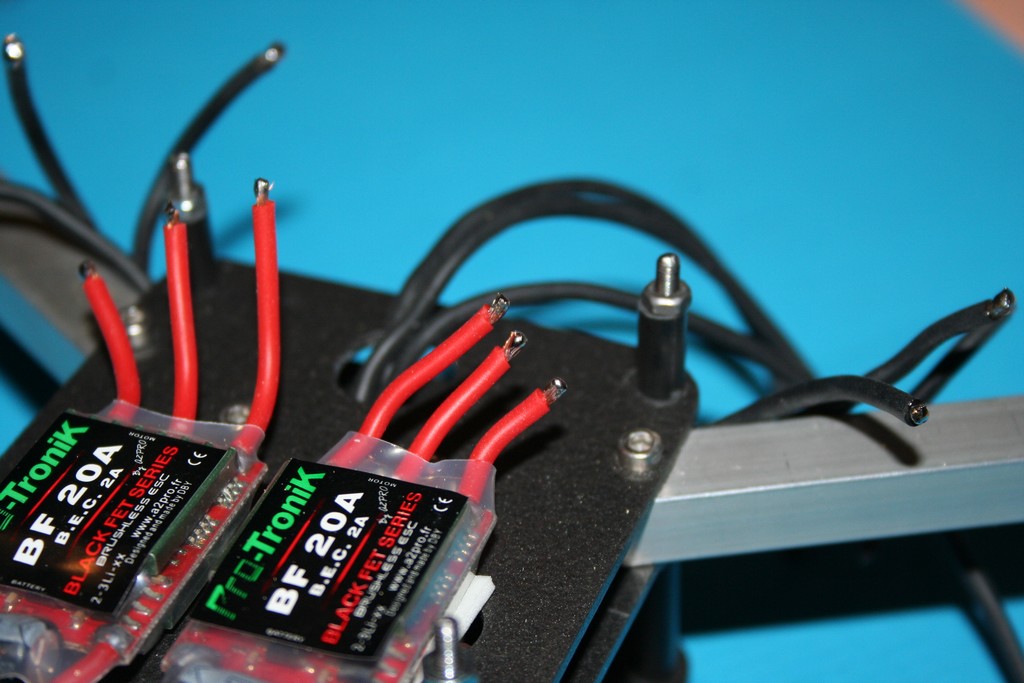
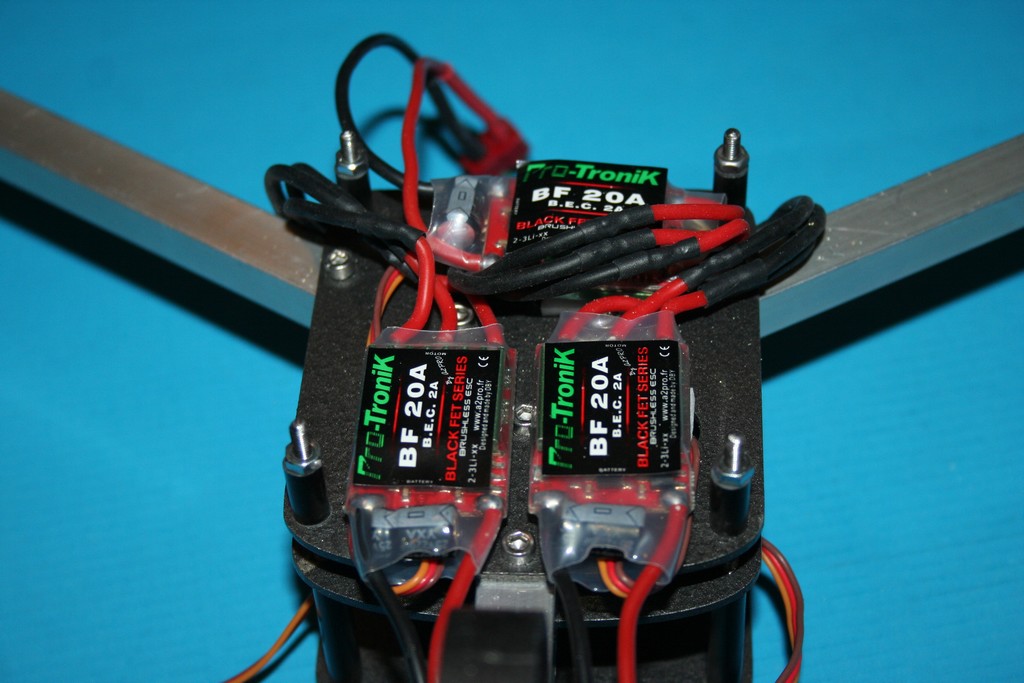
Il faut 3 moteurs et 3 contrôleurs identiques.
J'ai utilisé des brushless Pro-Tronik DM2210. Avec un kV de 1100,
la réponse sur le manche de gaz est très souple, la puissance
suffisante pour embarquer l'équipement FPV. Ceux qui préféreraient
avoir davantage de vivacité pour les accélérations
peuvent installer des 1400 kV. Le supplément de puissance se
ressent immédiatement mais l'action au manche devient sensible
et il faut être doux près du sol avec un filet de gaz quand
le tricoptère n'est pas chargé car il ne demande alors
qu'à bondir. Les voltigeurs apprécieront plutôt
cette version, ceux qui embarquent un équipement lourd pour le
vol en immersion également.
Les contrôleurs 20 A sont amplement suffisants, des 12 A conviendraient
également.
Le servo doit être assez puissant car l'axe de lacet est très
sollicité. J'ai utilisé un Pro-Tronik 7470 TG-D à
pignons métal et titane de 16 g, il n'a pratiquement aucun jeu.
Les hélices sont des Gaui 8»x4» très efficaces
et résistantes. Elles encaissent très bien les petits
chocs et la casse est très rare.
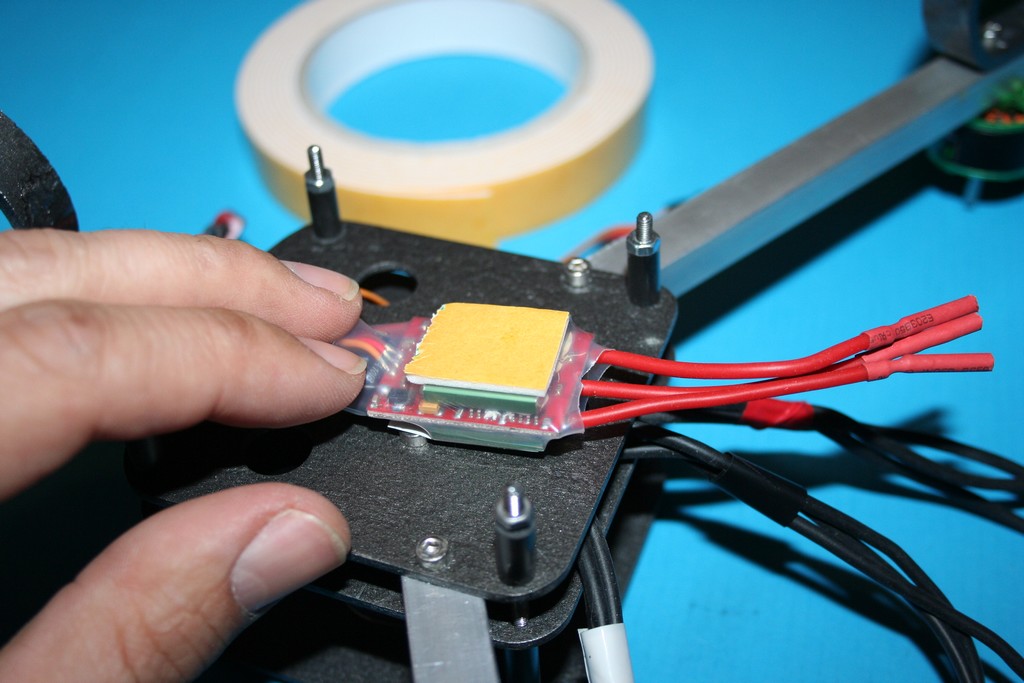
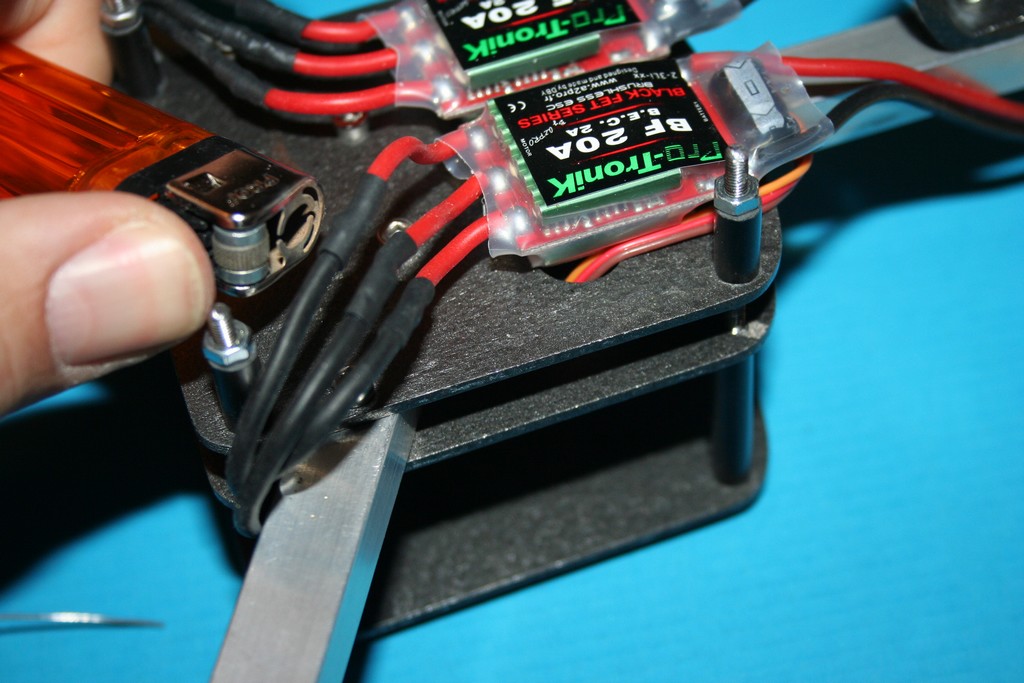
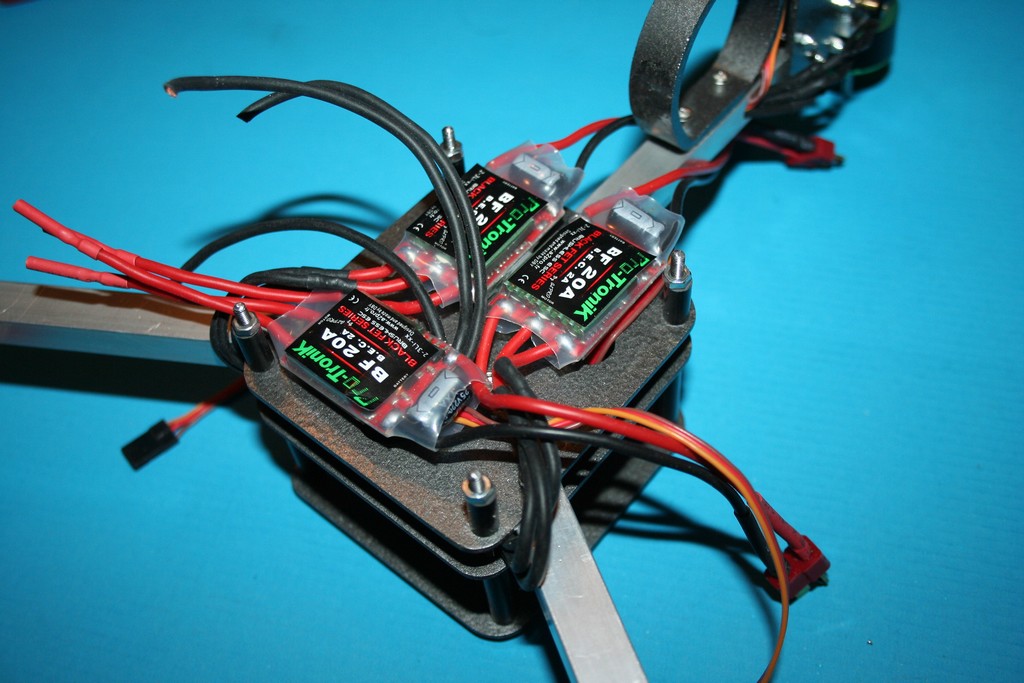
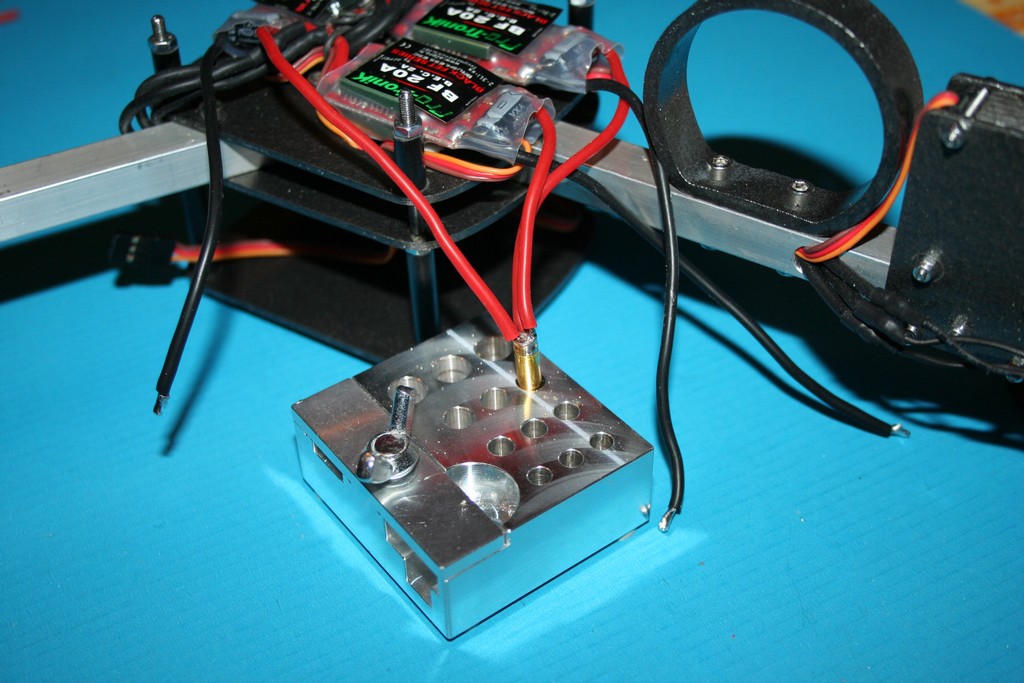
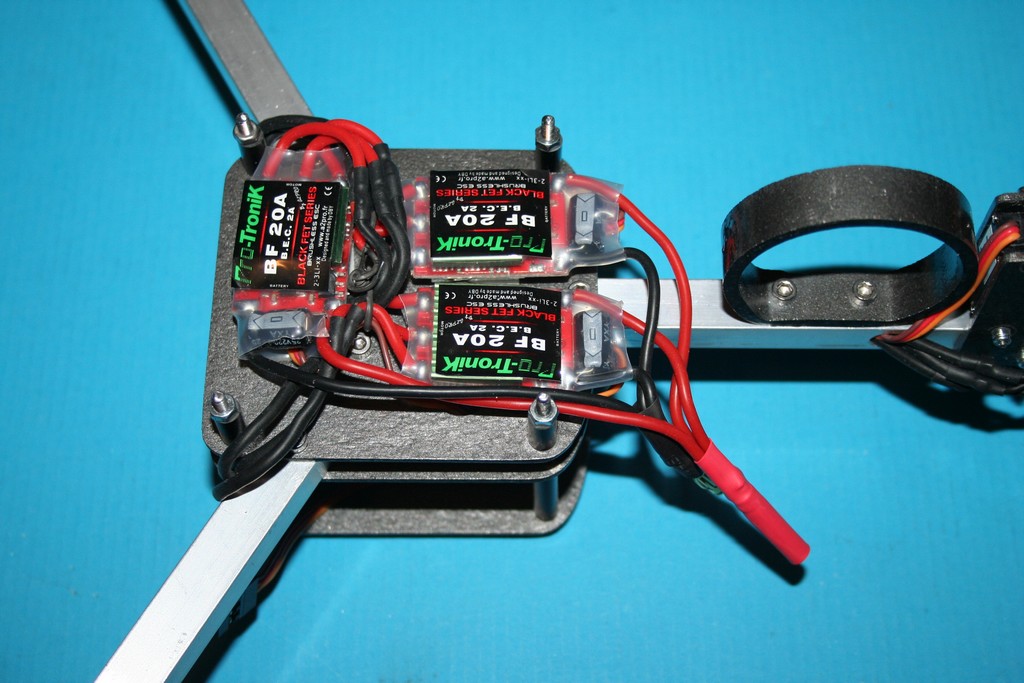
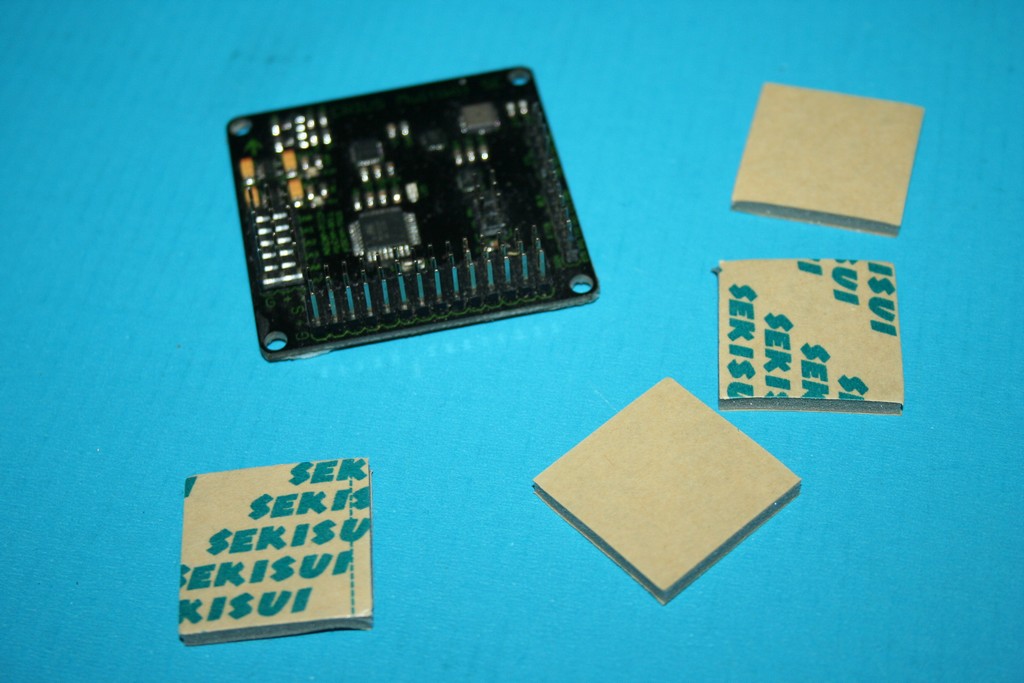
Les contrôleurs sont collés
avec de la mousse adhésive double-face sous la platine.
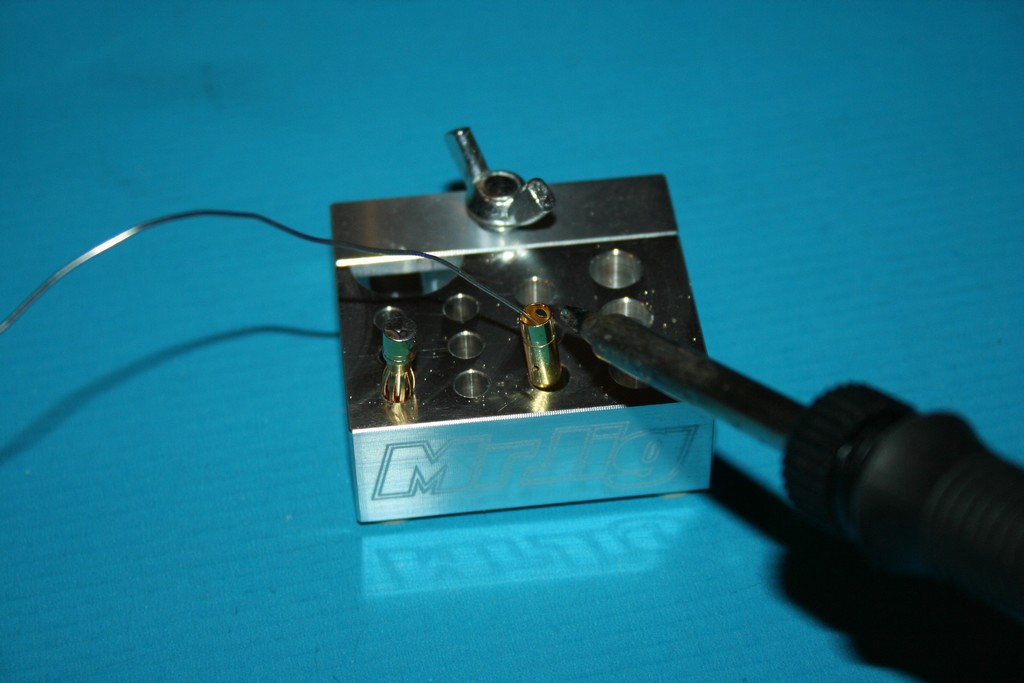
Les soudures se font progressivement, en restant bien attentif
afin de ne pas mélanger les câbles. Les contrôleurs
pour les moteurs à l'avant sont placés sur l'arrière
de la platine, celui du moteur arrière venant bien sûr
se monter à l'avant.
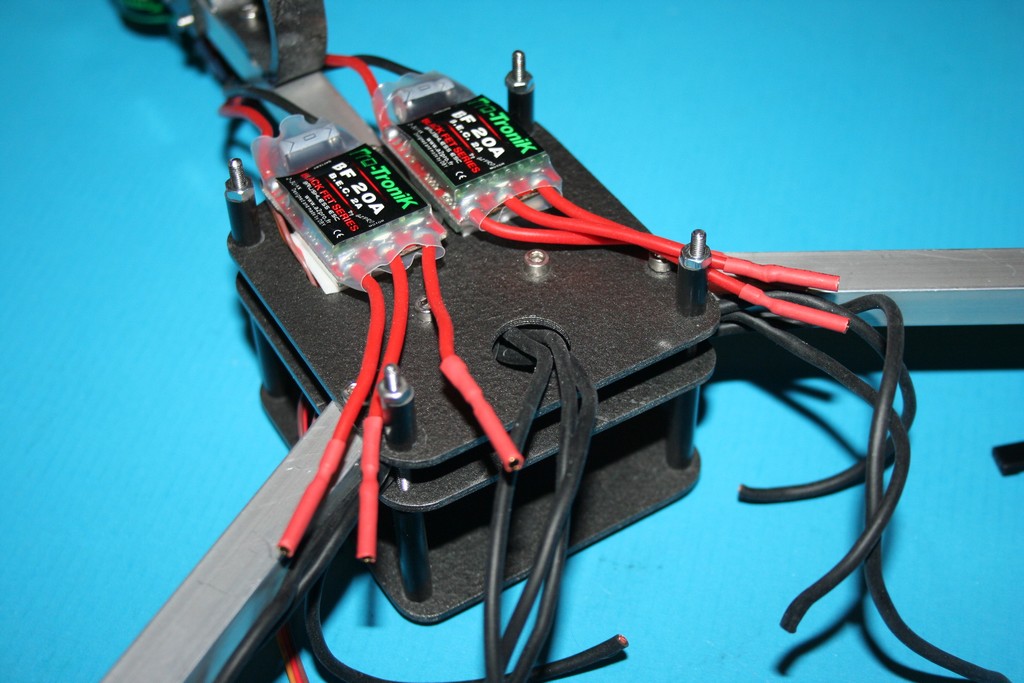
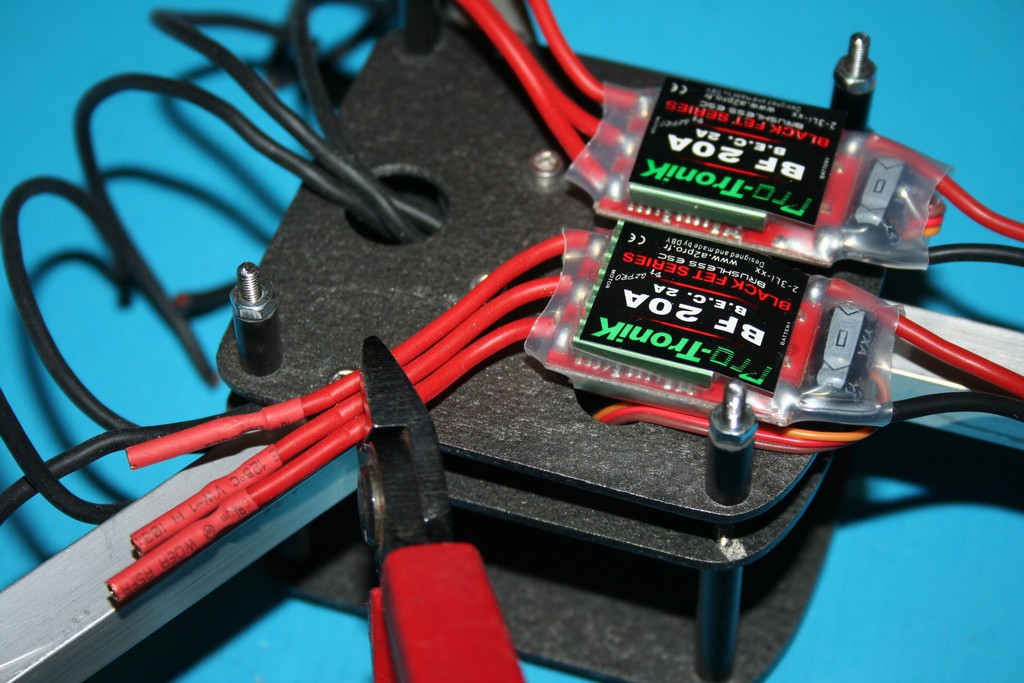
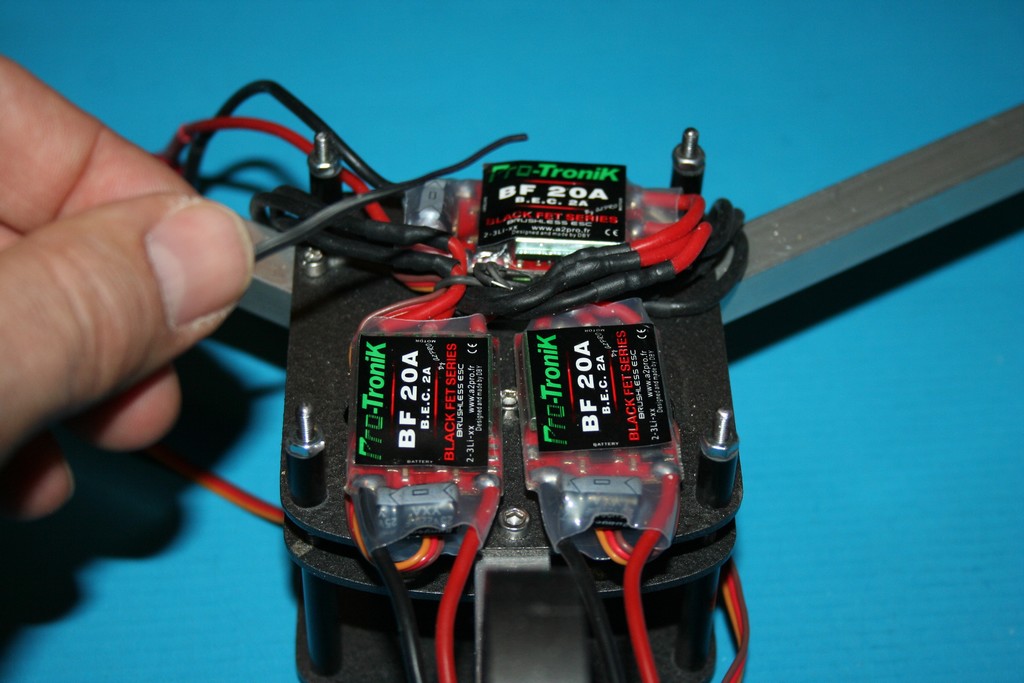
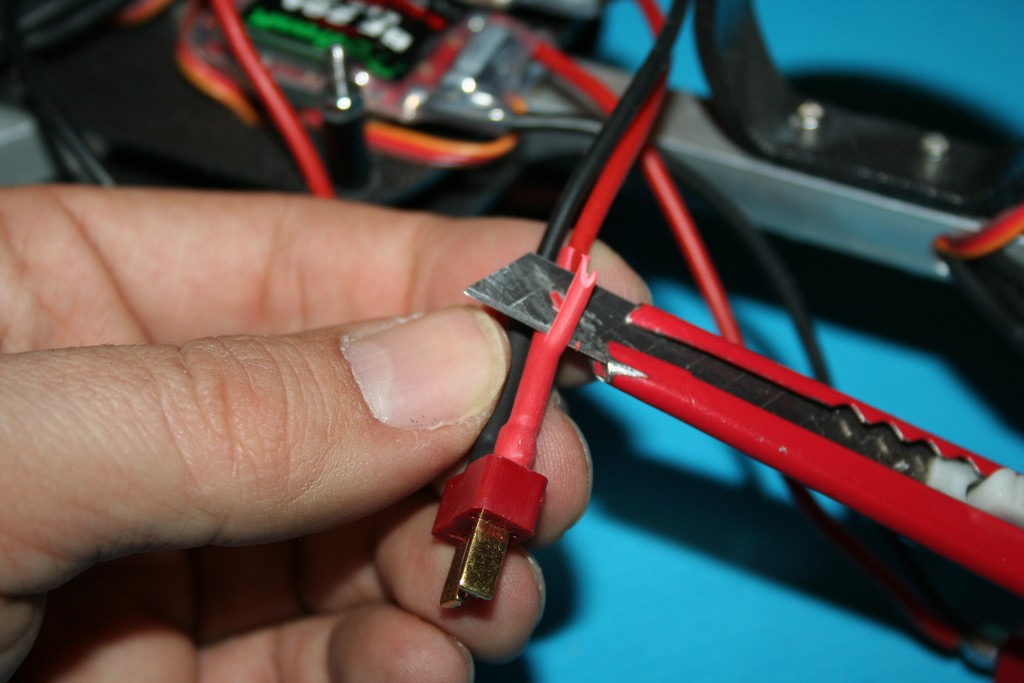
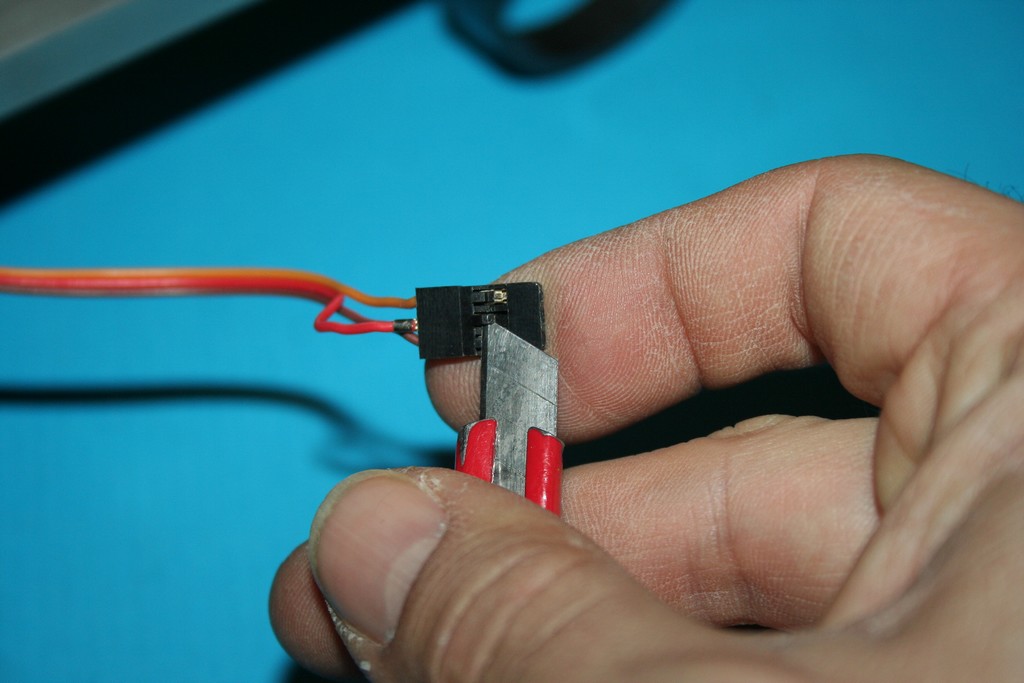
Les câbles sont recoupés
au plus juste, raboutés et isolés avec de la gaine
thermorétractable. Des colonnettes sont intercalées
sur les tiges filetées pour que la platine portant la batterie
ne viennent pas les écraser.
Des serres-câbles permettent de
faire un peu de rangement dans tous ces fils. C'est ensuite au tour
des fils noirs et rouges allant à la batterie. Ils doivent
être regroupés par couleur sur une même prise.
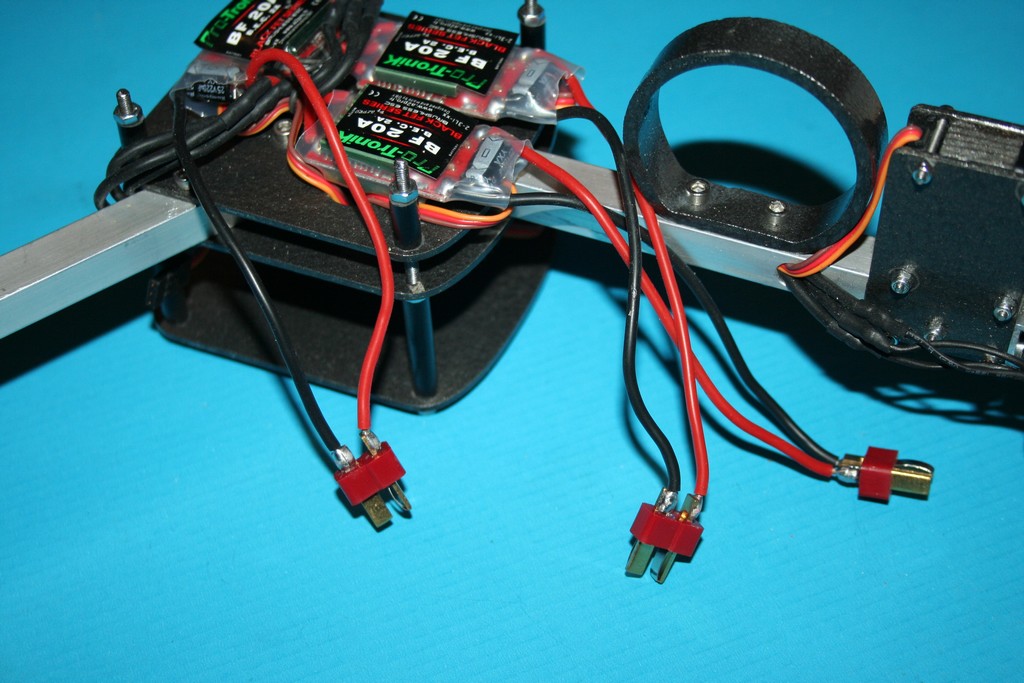
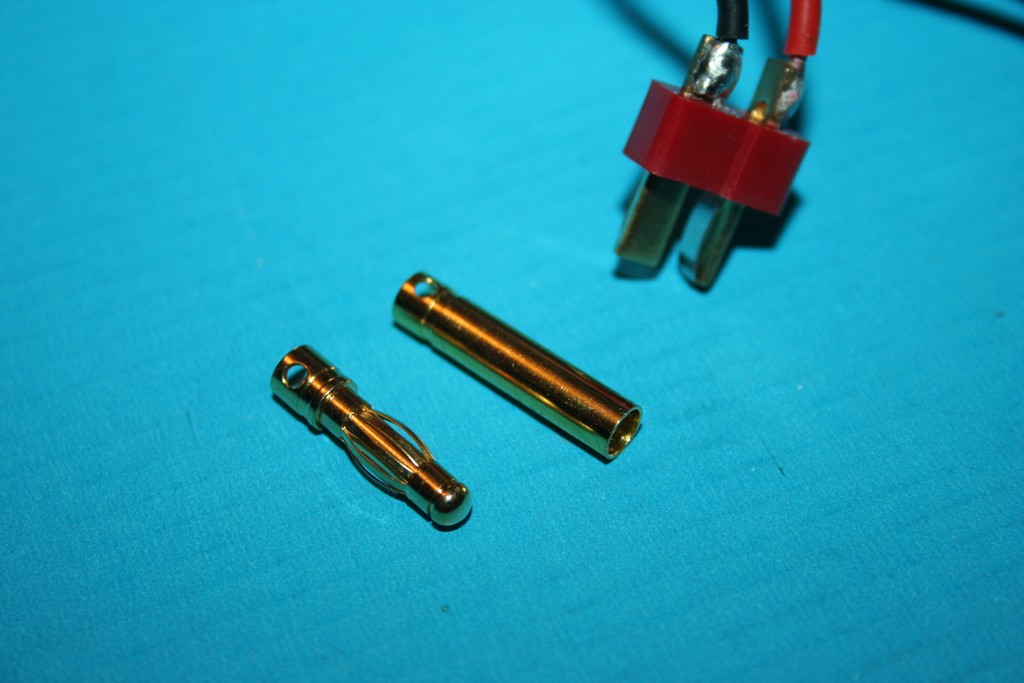
Les 3 fils noirs sont regroupés
sur une prise, les 3 rouges sur une autre, avec un détrompeur
en rapport avec celui de la batterie.
Lorsque tout est propre, il suffit d'ajouter
le fond du châssis, en prenant garde à ne pas pincer
les câbles.
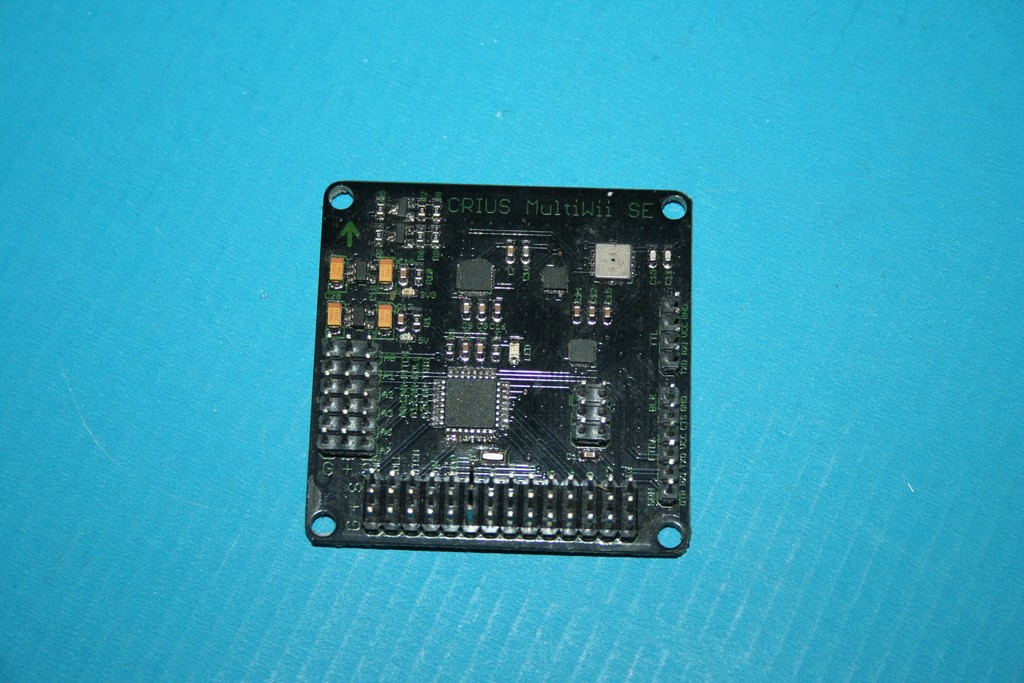
Carte
électronique
De nombreux modèles existent dans le commerce
et il doit en sortir de nouveaux tous les jours, ou presque... Chacun
fera donc selon ses besoins et son budget. Celle qui a été
choisie est une Crius Multiwii SE qui vaut moins de 50 € en France.
Elle dispose d'un microcontrôleur 6 axes gyroscope/accéléromètre
et d'un tas de fonctions additionnelles. Elle assiste donc le pilote
à maintenir la stabilité de la machine. Le paramétrage
s'effectue sur l'ordinateur à l'aide des programmes MutliWii
Arduino et MultiWii Confing. L'étendue des réglages est
très vaste et en constante évolution grâce au logiciel
Opensource et une communauté qui le complète sans cesse.
Elle gère tous les types de multicoptères, et la dernière
version s’adapte aussi sur les avions.
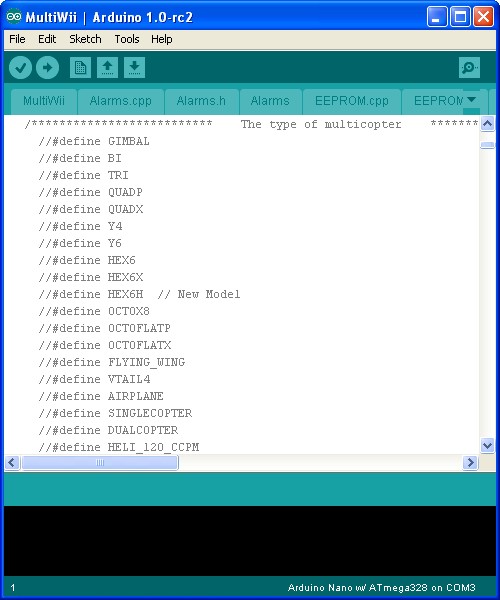
Tout se règle par la programmation, en anglais. Le code est heureusement
très détaillé, ligne par ligne, et les réglages
sont compréhensibles et très nombreux, si bien qu'il n'y
a pratiquement pas besoin d'intervenir sur l'émetteur. On réglera
par exemple le failsafe en conservant juste un filet de gaz pour que
le modèle ne retombe pas en chute libre en cas de perte de réception
radio. On programmera aussi l'arrêt complet des moteurs après
un temps déterminé, dans le but d’éviter
aux contrôleurs de griller si le tricoptère se retrouvait
coincé quelque part après une perte radio ou encore de
partir à perte de vue... Les trims et les courbes d'exponentiel
se gèrent également depuis la carte. Il existe des tutoriaux
sur le Net qui permettent de se plonger dans le bain. Ca peut sembler
compliqué au premier abord mais on comprend vite la logique.
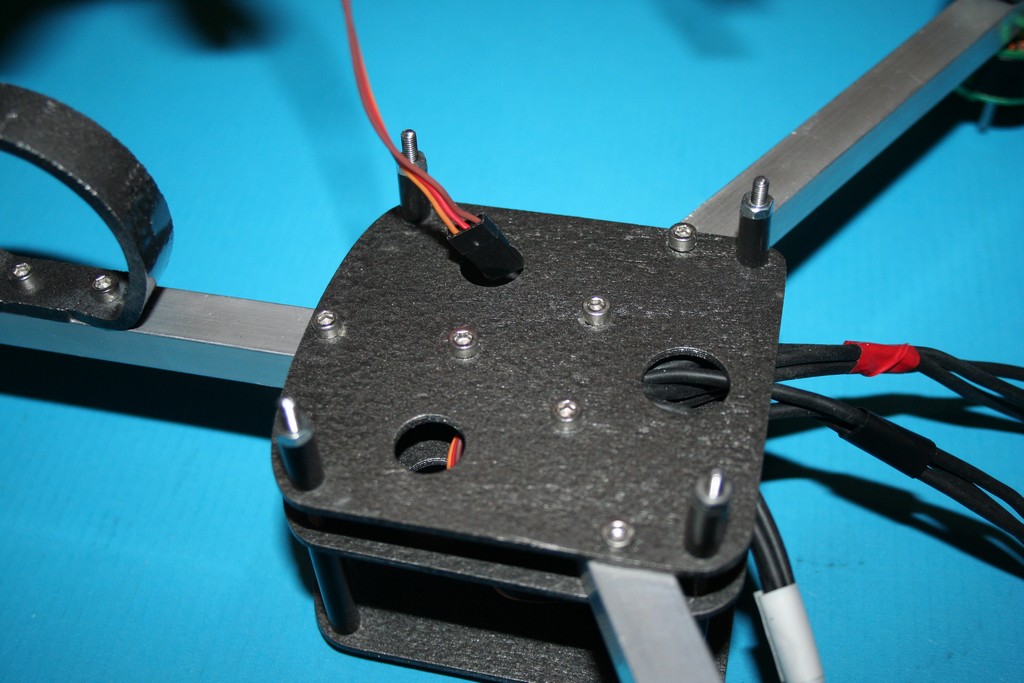
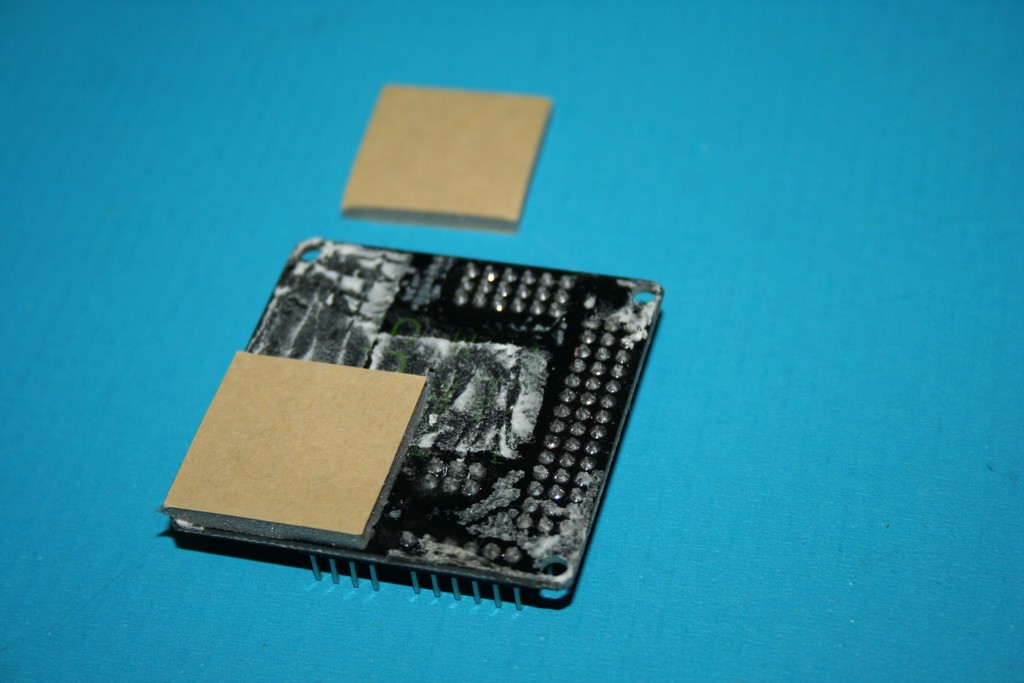
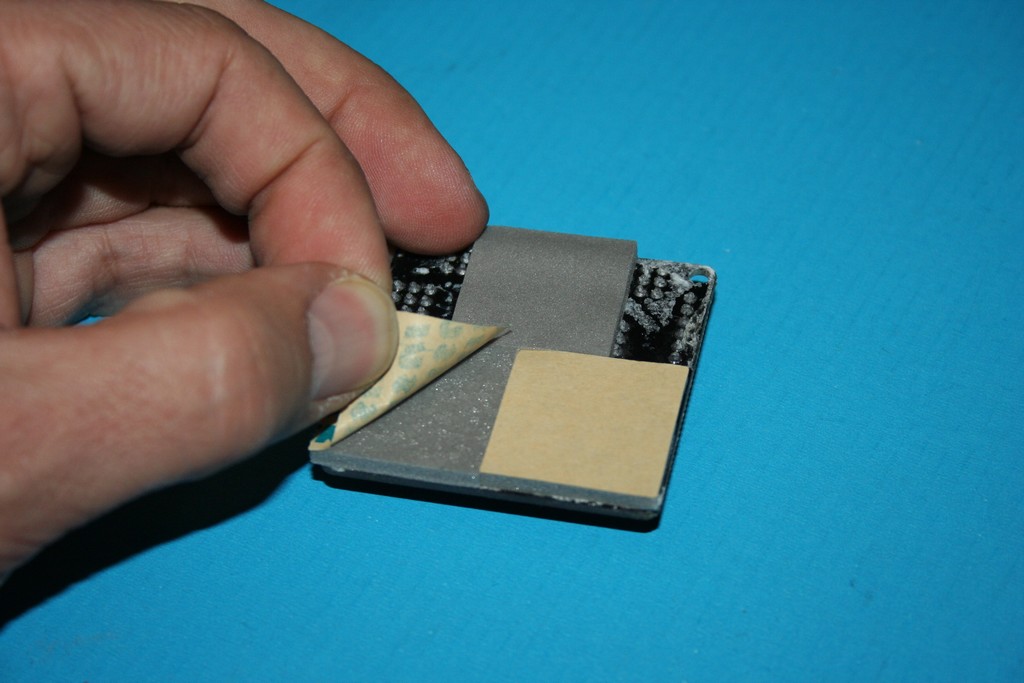
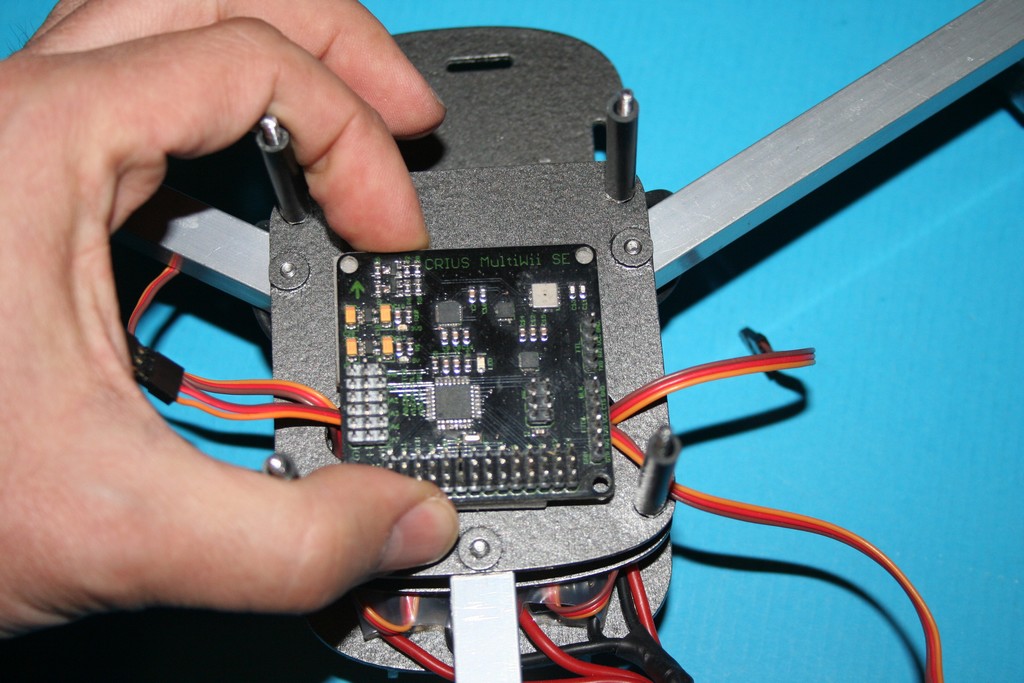
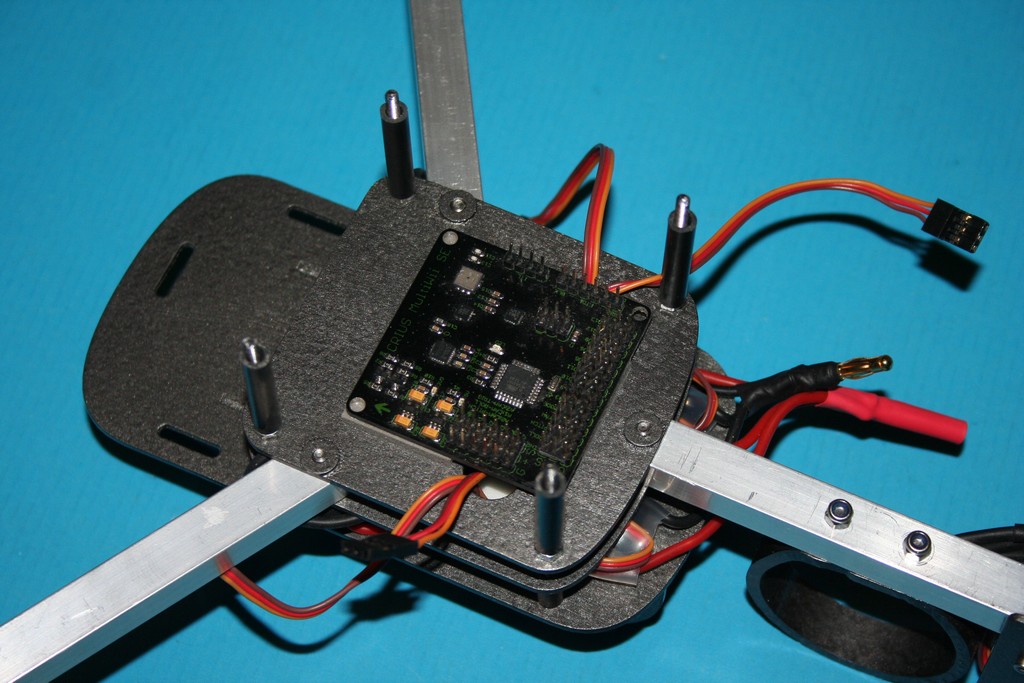
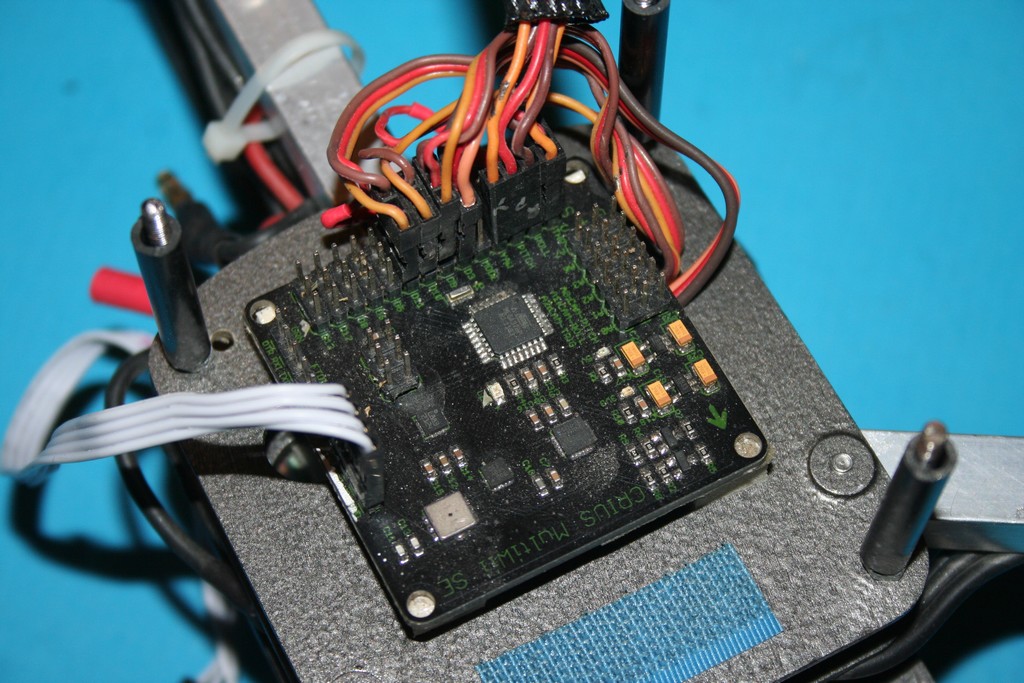
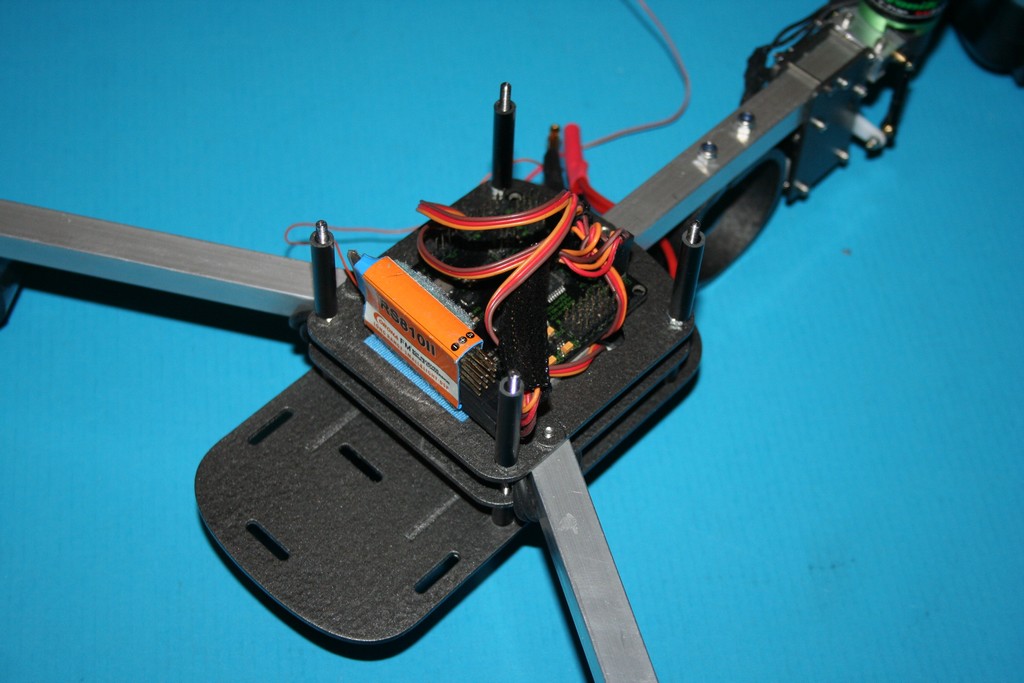
La carte de stabilisation est collée
à la mousse adhésive double-face, bien au centre du
châssis, en s’assurant que la petite flèche qui
y est imprimée soit bien dirigée vers l’avant.
Ceux qui n'ont pas envie de se jeter dans la programmation
trouveront des cartes plug&play, peut-être plus complètes
mais moins évolutives. La carte Crius intègre par exemple
la gestion d'un GPS optionnel pour que la machine revienne elle-même
à son point de départ, ou la gestion de deux servos pour
piloter un « gimbal » qui stabilisera une caméra
malgré l'inclinaison ou les oscillations du multicoptère.
Les vidéos à la façon « documentaire télévisé
» seront alors à votre portée. A noter qu'un tel
système est adaptable à l'avant de notre Triomini en glissant
les deux servos sous la platine inférieure.
Les câbles électriques AWG 16 ou 14 (1,3
à 2 mm²) passent dans les profilés en aluminium.
Ils sont ainsi parfaitement protégés et c'est beaucoup
plus propre. Si les trous au passage des vis ont été manchonnés,
c'est encore plus facile. Ces câbles sont soudés du côté
des moteurs, puis du côté des contrôleurs, en prenant
soin de ne pas les mélanger au moment de les raccorder. Avec
les contrôleurs BF-20A, il n'est pas utile de se soucier du sens
de rotation des moteurs lors du branchement puisque ce paramétrage
est accessible avec la carte de programmation. Les 3 contrôleurs
sont donc réglés de façon strictement identique
mais un seul BEC sera conservé sur l'un d'entre eux. Les fils
rouges seront donc retirés des prises allant à la carte.
Les fils d'alimentation du moteur arrière débouchent sur
le flanc du tube avec ceux du servo.
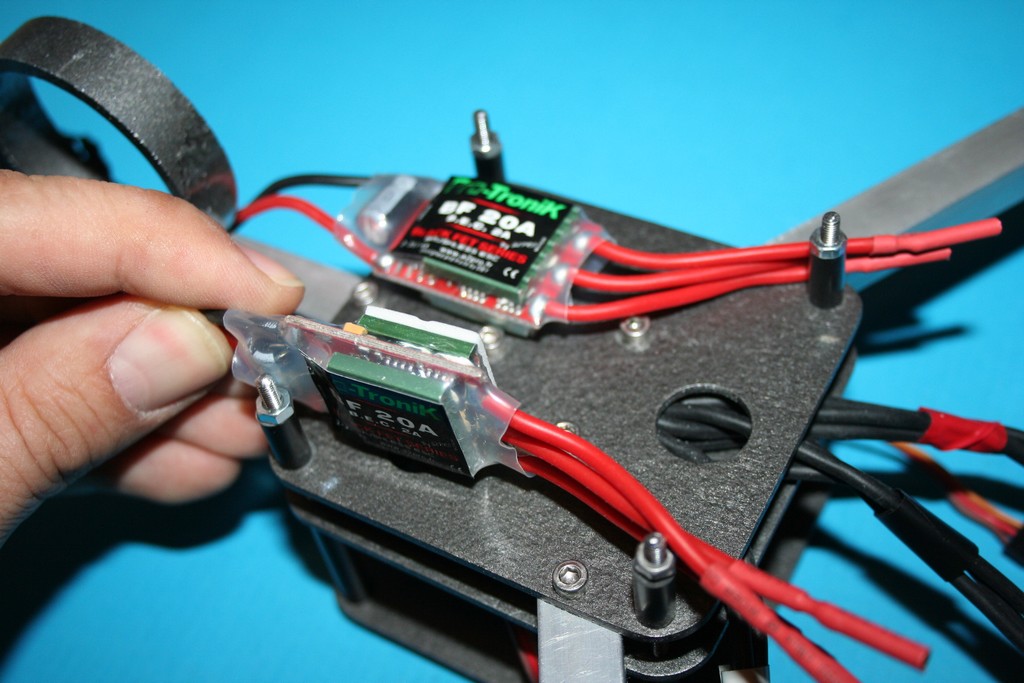
Les contrôleurs sont réunis entre les deux platines inférieures,
immobilisés avec des morceaux de mousse adhésive double
face. Les fils d'alimentation des contrôleurs sont regroupés,
positifs d'une part et négatifs de l'autre. La longueur doit
être suffisante pour pouvoir raccorder la batterie.
La carte de programmation permet de régler
les contrôleurs et notamment le sens de rotation des moteurs.
La batterie conseillée, 3 éléments
de 2200 mAh permet de voler une dizaine de minutes à vide
et environ 8 minutes avec le matériel d'immersion.
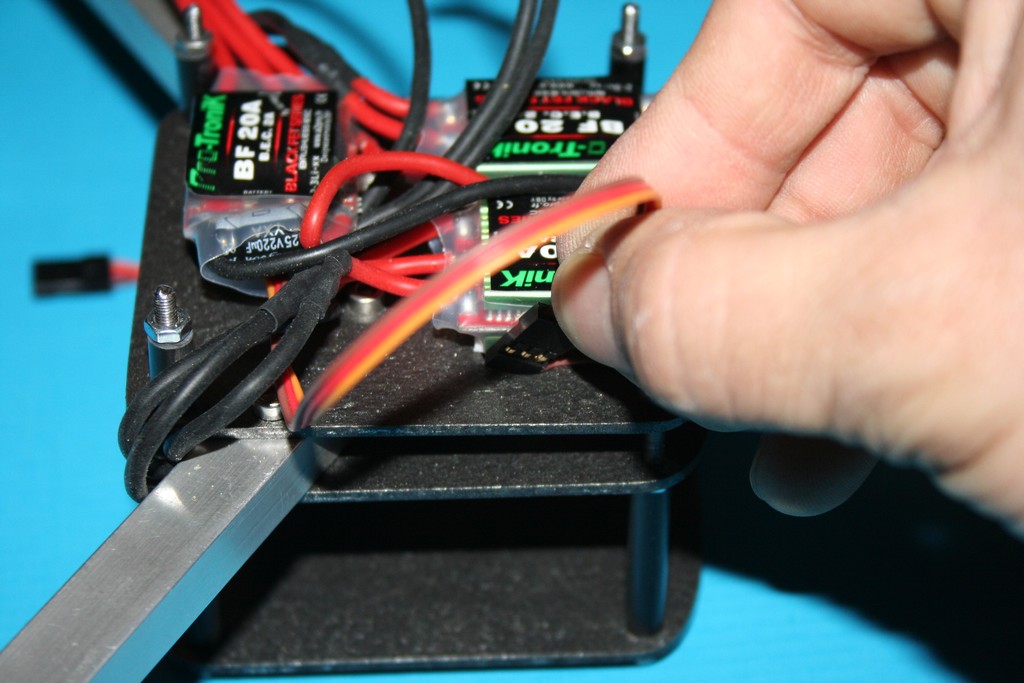
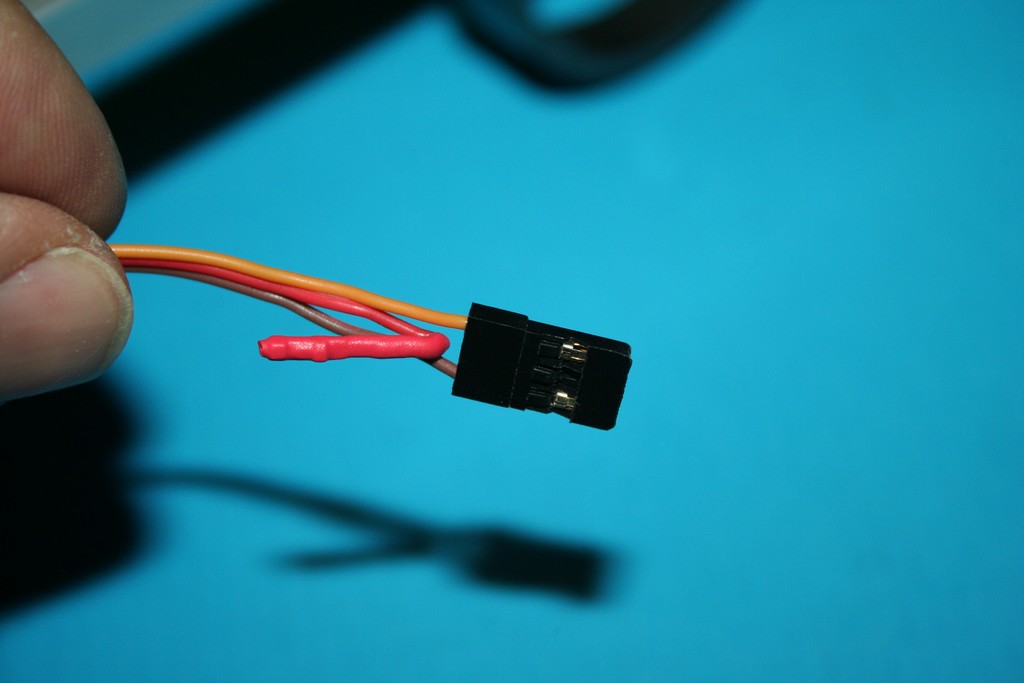
Après paramétrage des trois
contrôleurs, le BEC d'un seul est conservé pour alimenter
la radio. Le fil rouge est donc retiré des connecteurs sur
les deux autres contrôleurs.
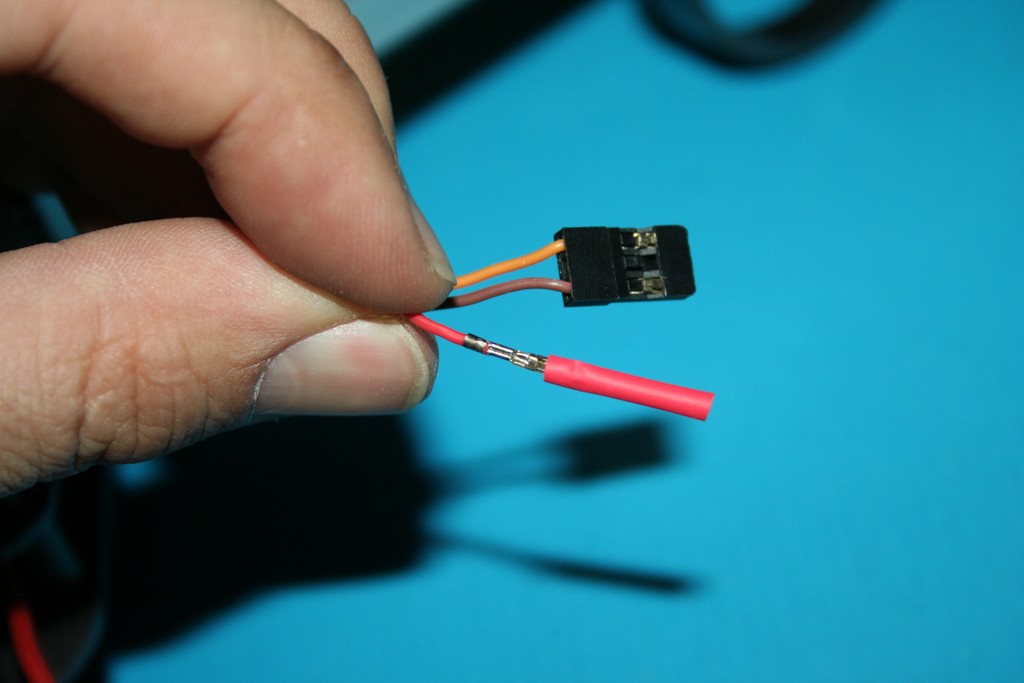
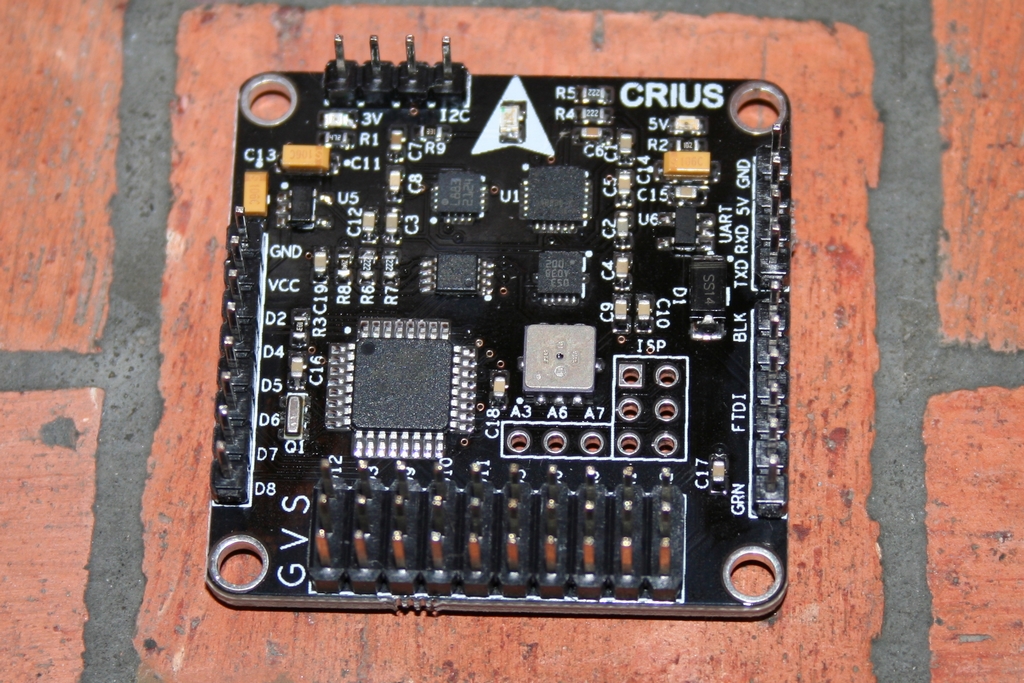
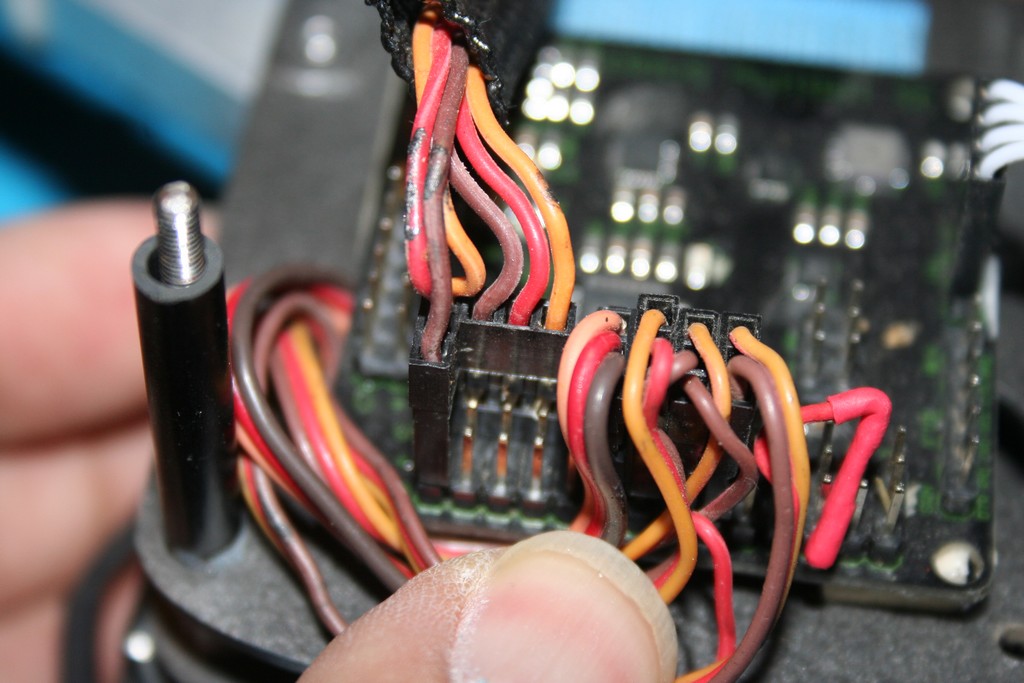
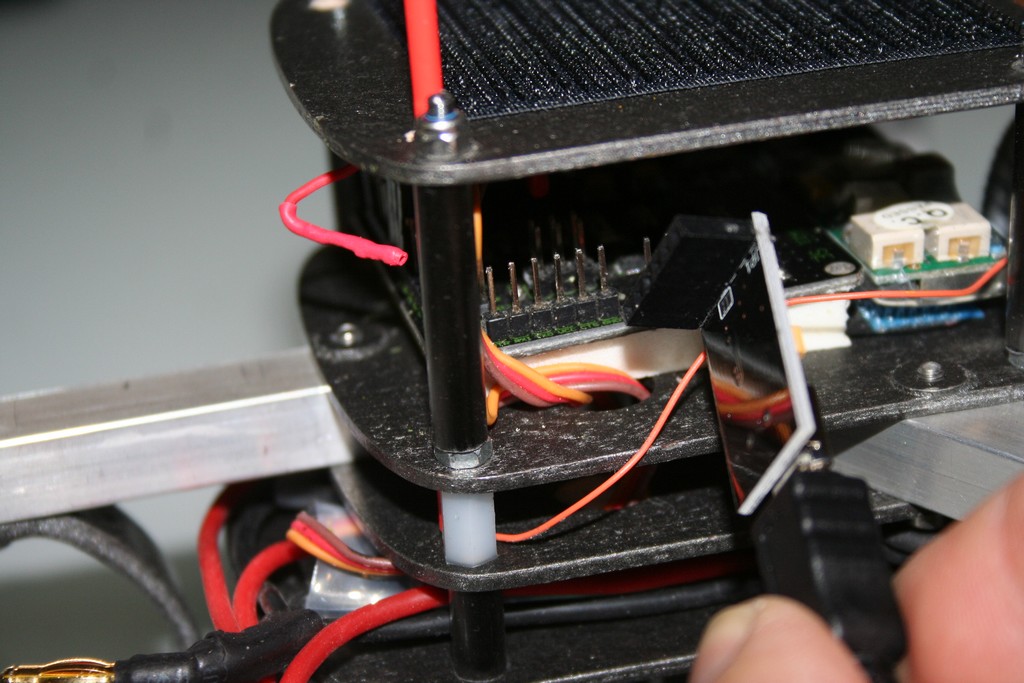
Il existe différente type de cartes.
La Crius photographiée ci-dessus n'est pas la même
que celle installée mais les connections restent identiques.
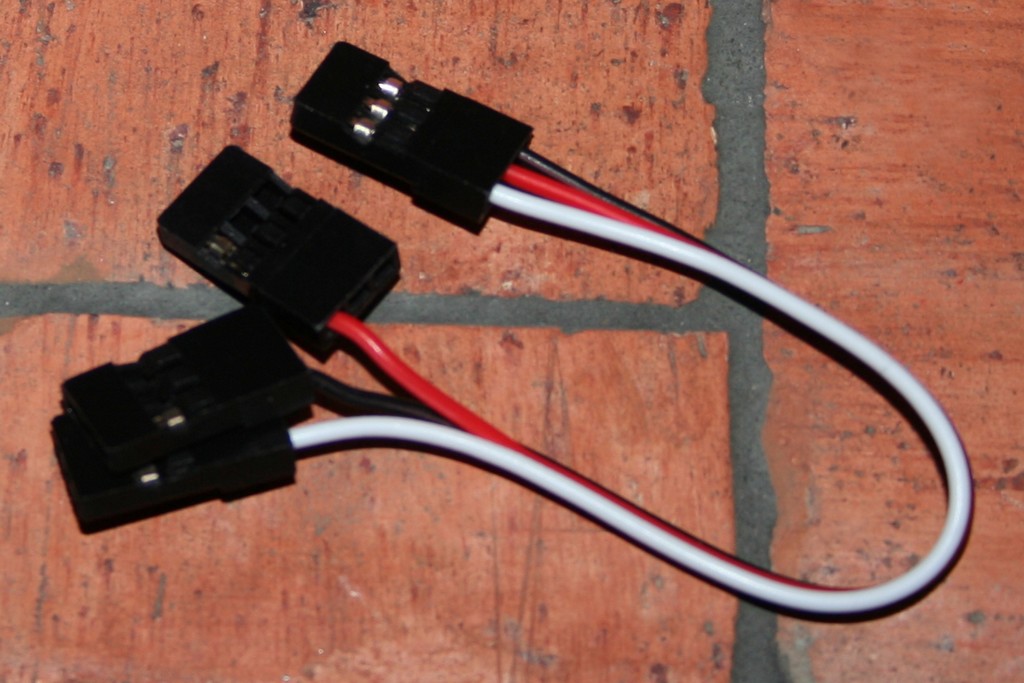
A gauche, la rallonge avec une prise d'un côté et 3
de l'autre, qui relie le récepteur à la carte.
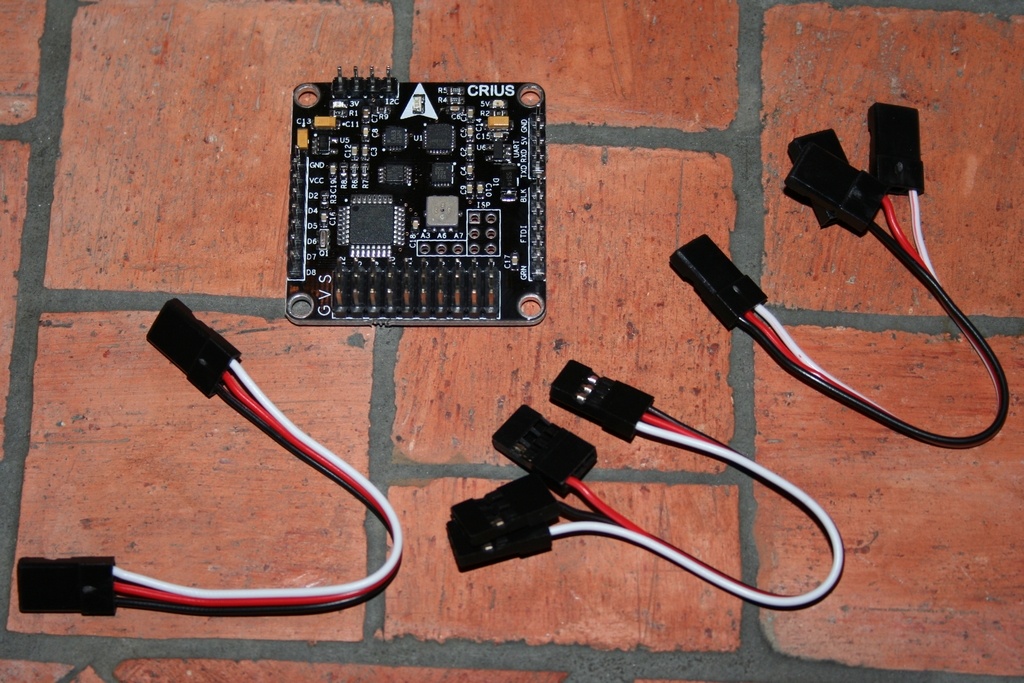
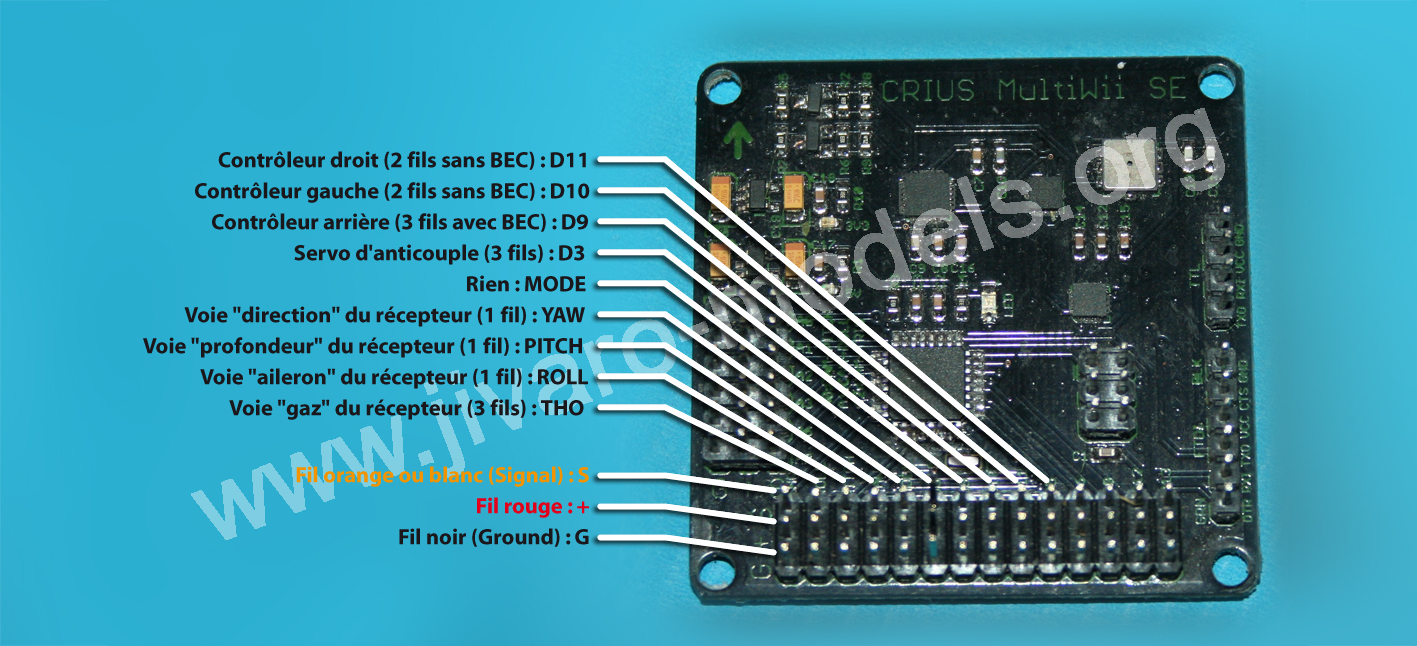
Raccordement de la carte aux 4
voies du récepteur, au servo d'anticouple et aux 3 contrôleurs.
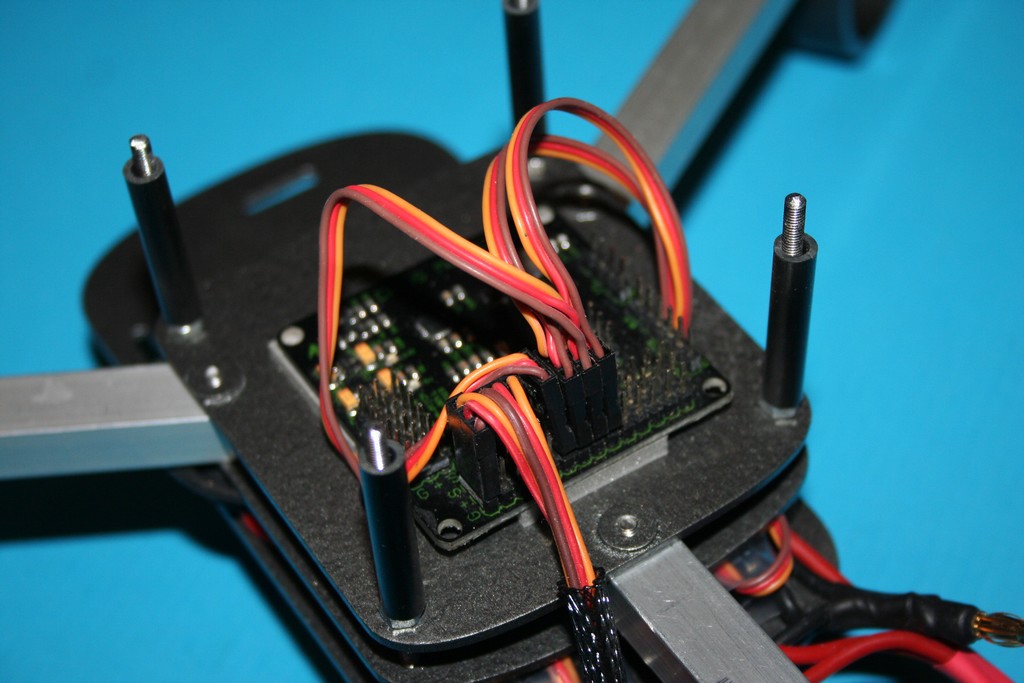
Le servo et les contrôleurs sont
branchés sur la carte électronique tandis que d’autres
cordons relient cette dernière au récepteur. La prise
spéciale avec 3 sorties qui va au récepteur est placée
à 90° par rapport aux autres. Sur la carte, elle n'est
branchée que sur le signal des voies de Roll (roulis), Pitch
(profondeur) et Yaw (lacet).
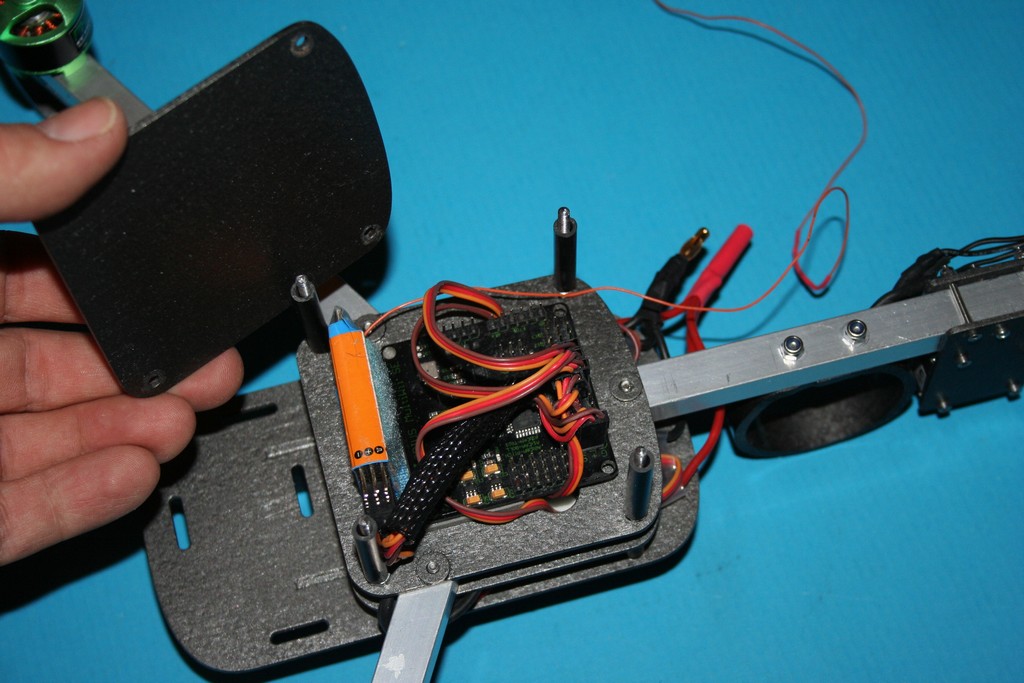
Le récepteur est glissé
à l'avant, ou sous la dernière platine s'il est trop
volumineux.
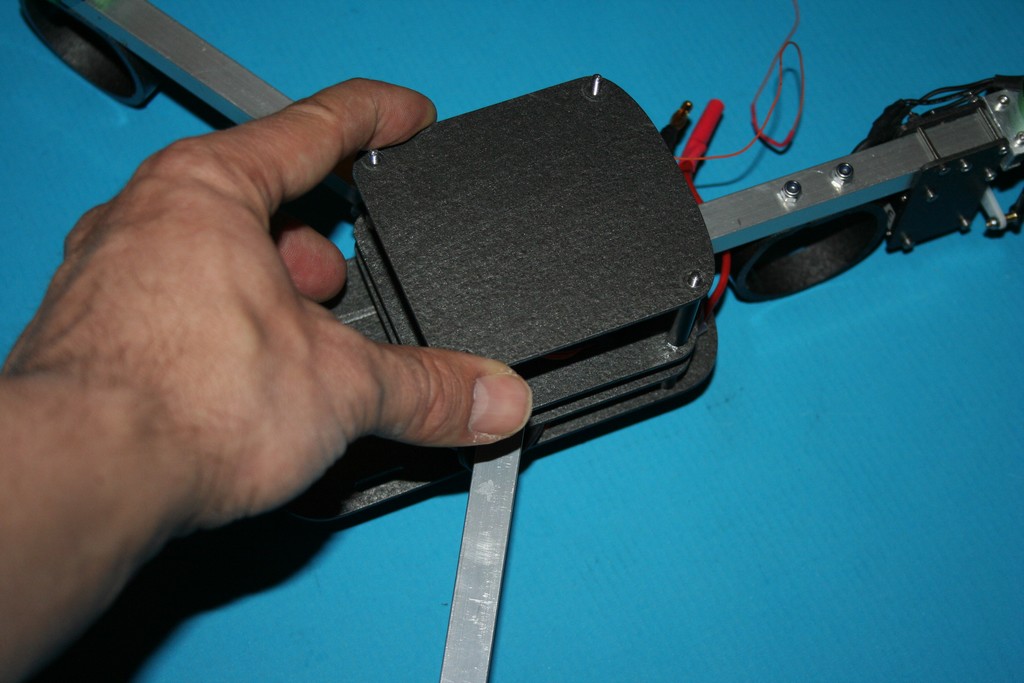
Lorsque tout est connecté correctement, le couvercle en contre-plaqué
vient protéger le tout. Il est maintenu fermé avec
4 écrous.
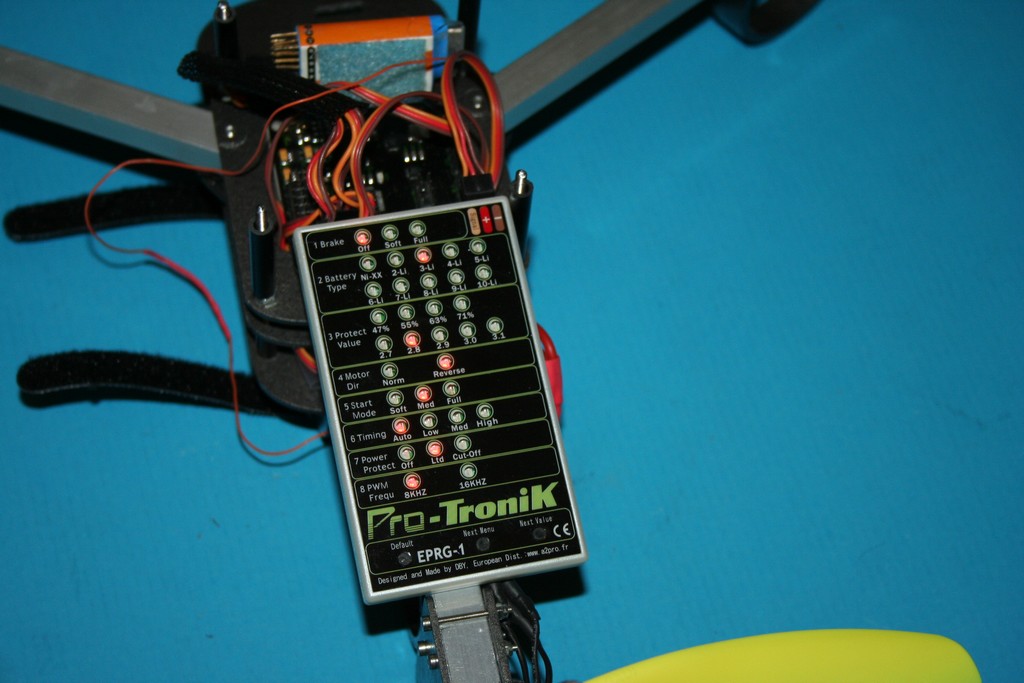
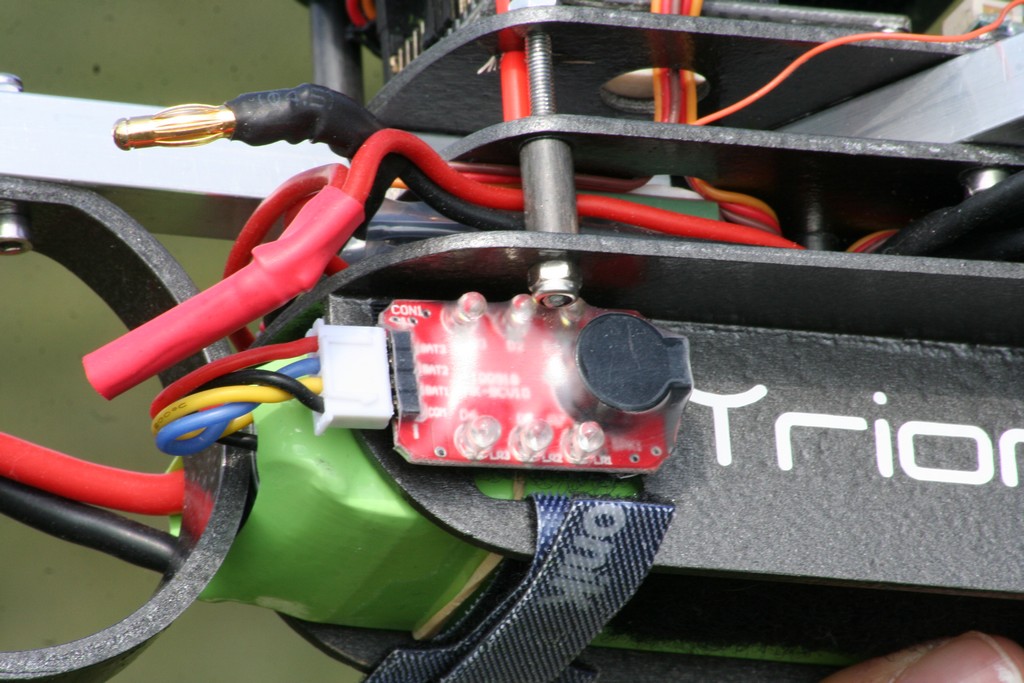
Un petit module électronique est ajouté
sur la prise d'équilibrage. Il indique visuellement l'état
de la batterie avec des leds vertes et rouges et possède un buzzer
très audible, bien pratique pour éviter de trop décharger
la batterie. En fait, quand la puissance faiblit, le Triomini n'arrive
plus à tenir en l'air. On n'insiste pas et on se pose dans la
foulée.
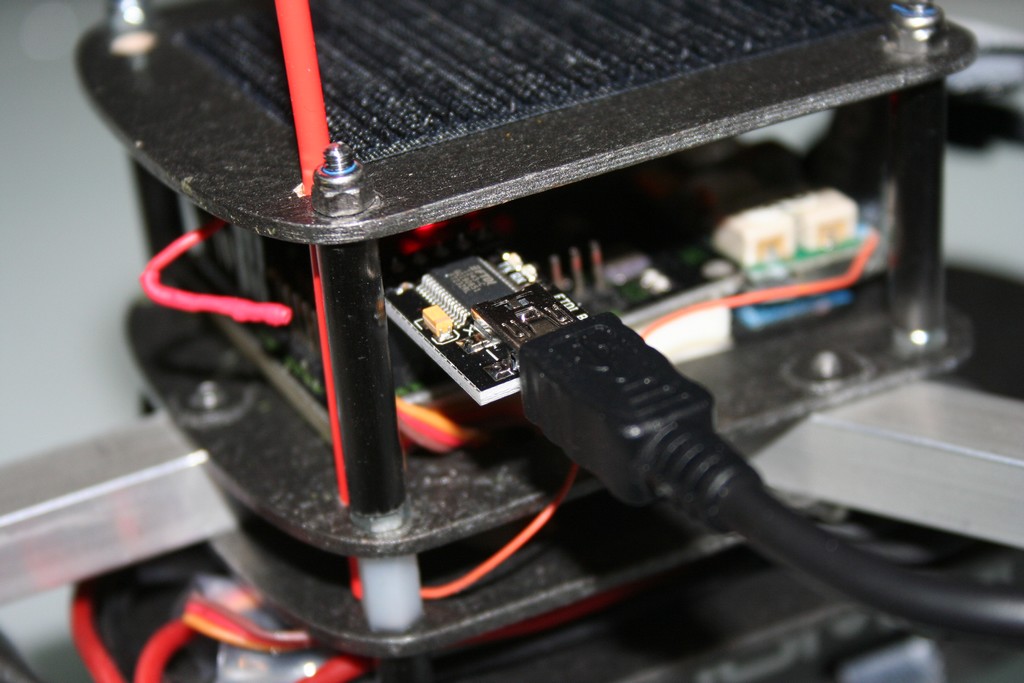
Programmation
L’interface
FTDI (qui
peut être commandée ici) permet de relier la
carte de stabilisation au PC avec un cordon USB afin de régler
les différents paramètres en quelques clics. Il n’est pas nécessaire
de retirer le couvercle supérieur pour connecter la carte.
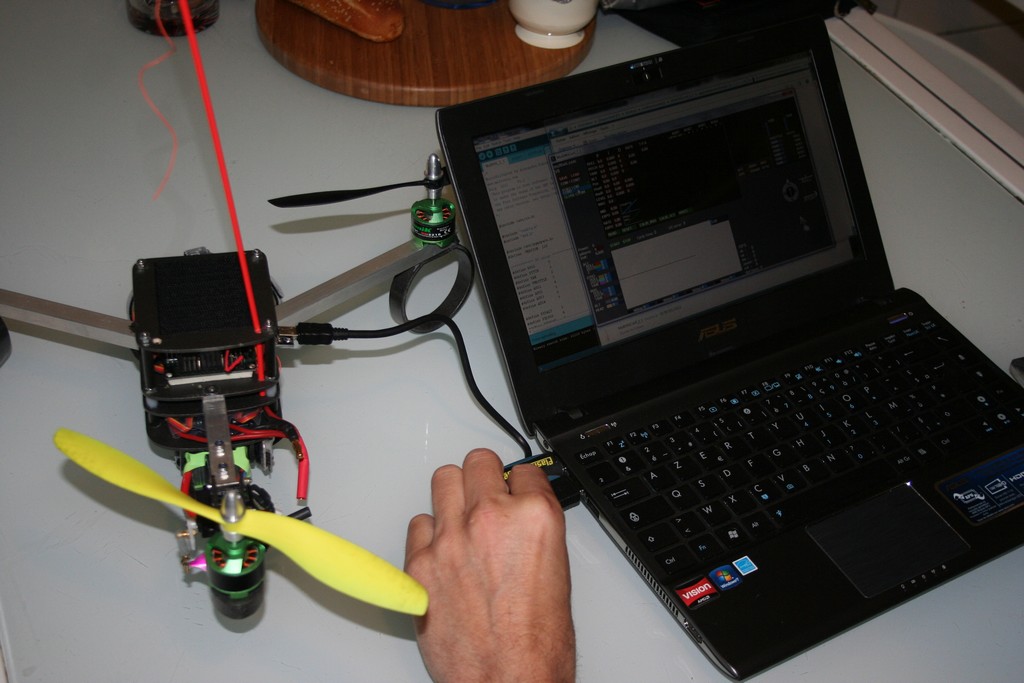
La programmation
de la carte s’effectue avec les programmes Arduino et MultiWiiConf
téléchargeables sur le site www.multiwii.com
Toutes
les infos concernant les dernières versions des programmes,
leur utilisation, et les questions que se posent les utilisateurs
sont sur le site www.multiwii.com
et son forum associé.
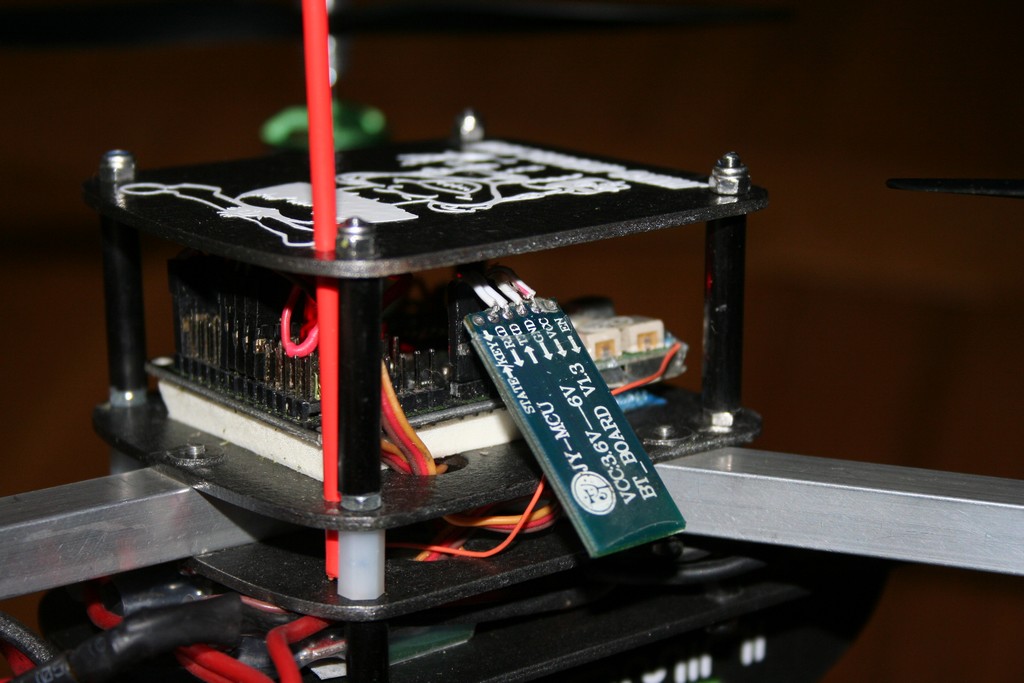
Sur le terrain, on peut également
intervenir sur différents paramètres de réglages
en ajoutant le module bluetooth JY-MCU Arduino qui communique avec
le téléphone portable.
L’application qui permet de paramétrer la carte avec
le téléphone s’appelle MultiWii Configurator
et tourne avec Android.
Pour ceux qui seraient paumés dans les réglages,
ne manquez pas d'aller faire un saut sur la
légion des quadri.
Un excellent tuto vidéo de
la Bledoff QuadriSchool qui détaille le fonctionnement
et les réglages des PID.
En
vol
La batterie est glissée dans son logement,
les sangles en Velcro sont serrées pour l'empêcher de bouger.
Le tricoptère est posé sur le sol bien à l'horizontale
puis la batterie est raccordée sur la prise allant aux contrôleurs.
On ne touche à rien pendant quelques secondes, le temps que tout
s'initialise.
Le premier décollage permettra de définir les réglages.
Avec la carte Crius, la mise des gaz en poussant le manche n'est possible
qu'après avoir mis le contact, qu’on obtient en poussant
le manche de direction en butée. Les moteurs se mettent alors
à tourner au ralenti. On met donc les gaz progressivement en
observant ce qui se passe et en essayant de maintenir la machine à
une trentaine de centimètres de hauteur afin de moins ressentir
les tourbillons en effet de sol. Si elle demande à partir franchement
d'un côté, il faut trimer. Les réglages ne se font
pas sur l'émetteur mais encore une fois directement depuis la
carte. Pour cela, on se pose, on baisse complètement le manche
de gaz afin de pouvoir arrêter totalement la rotation des hélices
en poussant le manche de direction en butée dans l'autre sens.
Les moteurs sont à l'arrêt tant que la procédure
de départ n'a pas été refaite. Pour entrer dans
la programmation, on repousse le manche de gaz à fond –
les moteurs ne peuvent pas démarrer dans cette configuration
– puis on pousse le manche correspondant à l'opposé
de l'axe qui posait problème. Par exemple, si le tricoptère
avait tendance à avancer tout seul, on amène le manche
de profondeur plusieurs fois en marche arrière, chaque action
correspondant à peu près à un cran de trim. La
procédure est élémentaire, il suffit de la répéter
jusqu'à ce que la machine soit parfaitement réglée
puisque après on n'a plus à y revenir. Les curseurs sur
la radio restent au neutre.
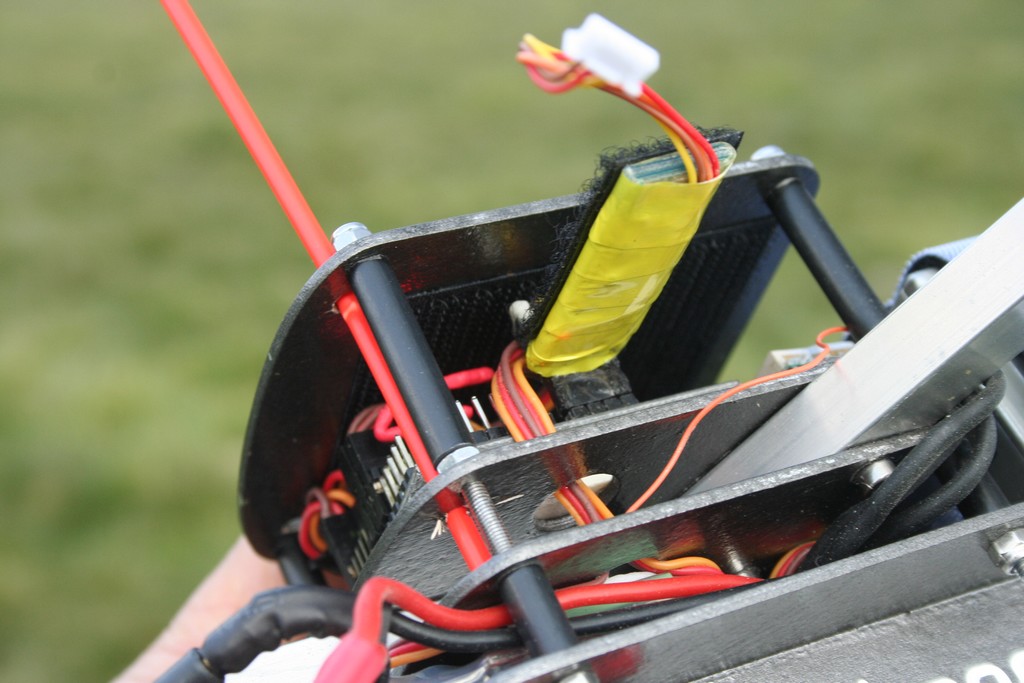
Le câblage électrique passe
par la lumière pratiquée à l'extrémité
du profilé. Ainsi, il n'est pas endommagé en cas de
choc.
Deux anneaux de Velcro maintiennent la batterie entre
les cloisons.
Ce petit module comporte un buzzer puissant
et des leds qui informent sur l’état de décharge
de la batterie.
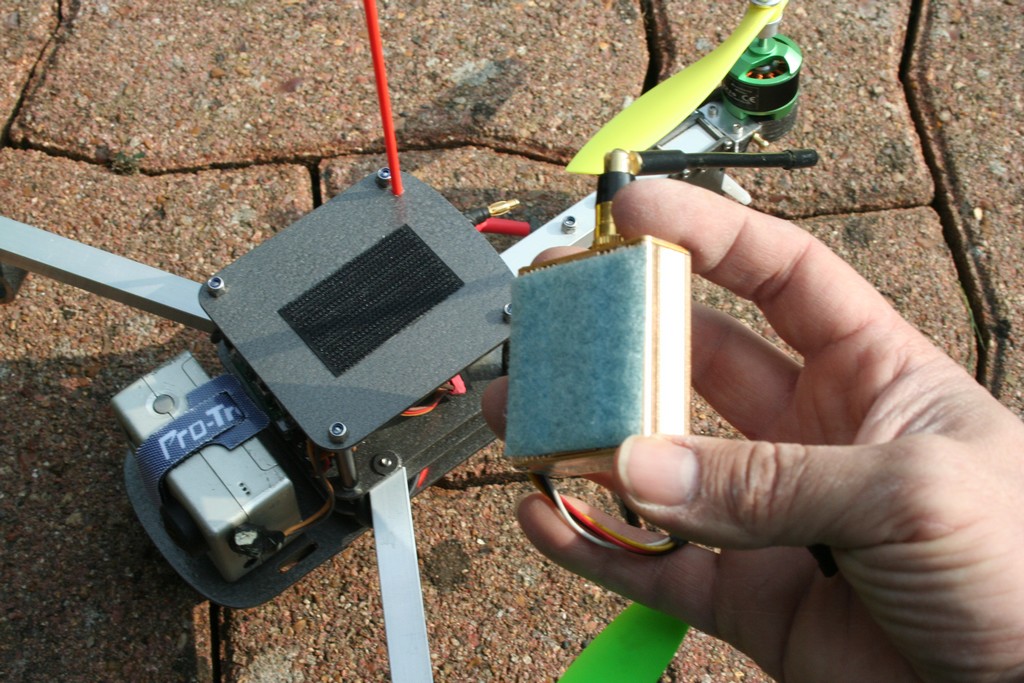
La caméra GoPro
trouve sa place à l’avant du châssis, elle
est bien protégée même lorsque la machine
se retrouve au sol dans une position imprévue.
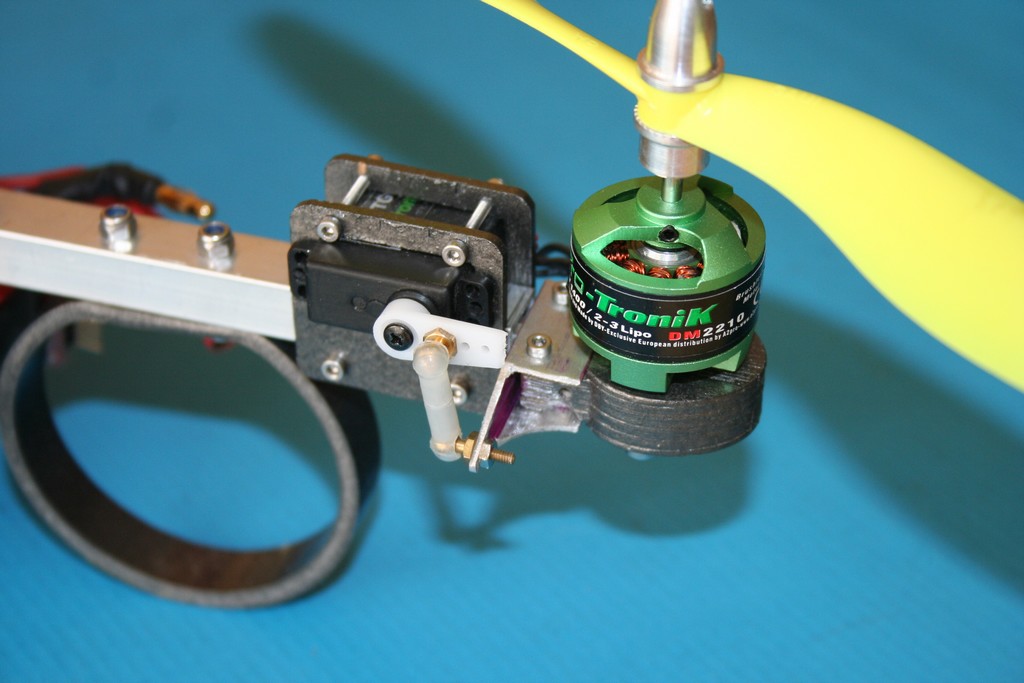
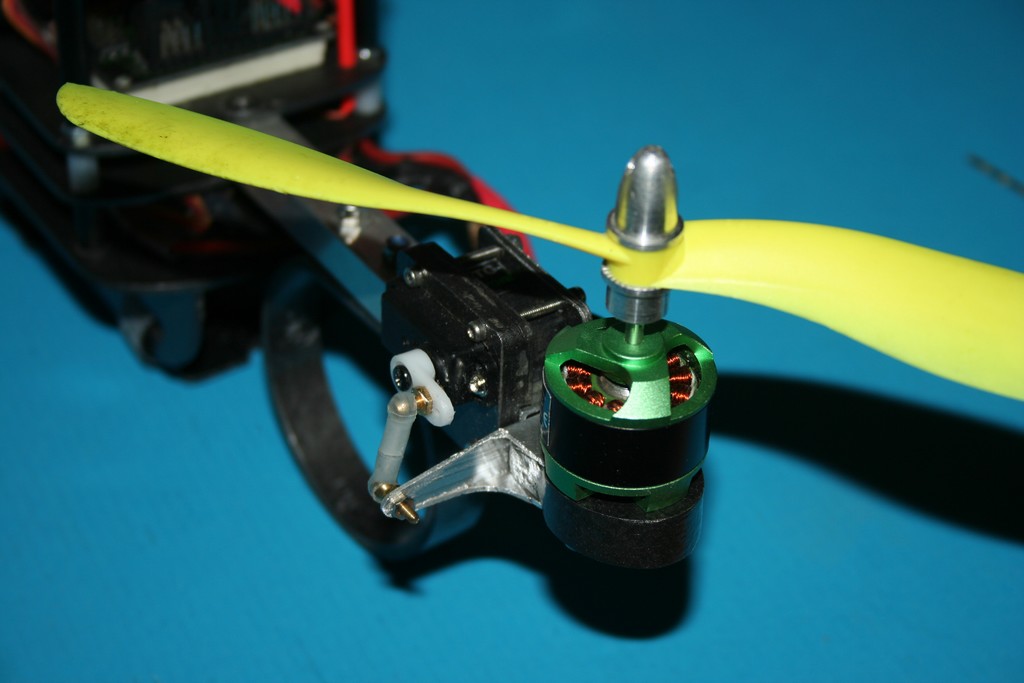
En vol stabilisé, le rotor arrière est
incliné de quelques degrés sur la droite. C’est
logique puisqu’il faut contrer le couple.
Ensuite, il n'y a plus qu'à se faire plaisir. La carte stabilise
le Triomini à l'horizontale. S'il est bien réglé,
on peut lâcher les commandes pendant plusieurs secondes. La puissance
disponible est assez importante, je n'ai jamais réussi à
mettre plein pot, la machine part déjà comme une balle
vers le ciel ! Pour obtenir des trajectoires propres, il est préférable
de piloter 3 axes, sans hésiter à mettre beaucoup de lacet
dans les virages. Mais on peut aussi voler constamment avec l'arrière
de l'appareil dirigé vers le pilote tant qu'on ne l'a pas bien
en main.
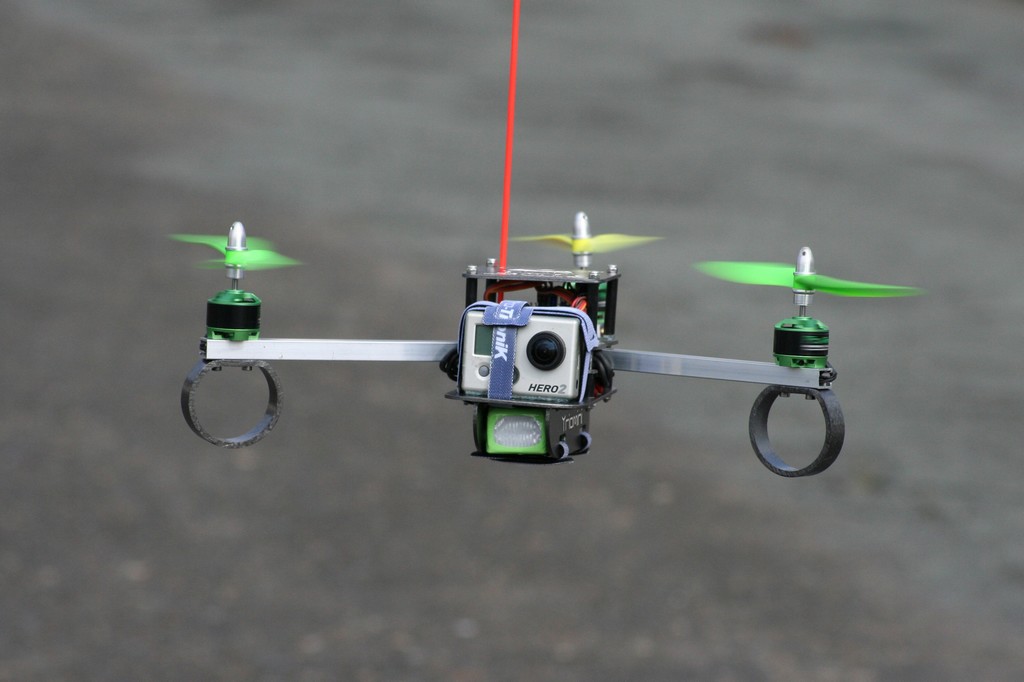
La couleur différente des hélices
aide à identifier l’arrière. La visualisation
est le problème avec ce type de machine quand on s’éloigne
un peu trop en vol à vue.
Le principal problème qu'on peut rencontrer,
c'est la visualisation de cet étrange trident. L'hélice
de couleur différente placée à l'arrière
aide beaucoup.
Le retour au sol s'effectue en jouant sur les gaz. Lors d'une approche
trop rapide, le tricoptère peut rebondir à cause de l'effet
de sol. C'est sans conséquence, sauf s'il arrive à se
retourner. Là, il faut couper la rotation des moteurs avec le
manche de direction.
Un réglage de la carte avec MultiWiiConf permet d'accéder
au paramètre « Angle ». Avec ce réglage, la
carte stabilise la machine tant qu'elle est peu inclinée. A partir
d'un certain angle, elle libère la stabilisation ce qui permet
d’accélérer franchement et même de voltiger.
Flips avant, arrière, latéraux... sont alors à
la portée des acrobates mais il faut quand même avoir une
bonne vue, de l’eau sous la quille… et de bons réflexes
!
Je préfère le vol plus « calme » en immersion,
confortablement installé, avec les lunettes sur le nez qui donnent
l'impression d'être assis dans la machine.
Le
vol en immersion
L’ajout d’une caméra ne change
rien au niveau des réactions de l’appareil, il faut juste
un peu de puissance supplémentaire donc l’autonomie diminue.
Je vole la plupart du temps avec une caméra GoPro branchée
sur un émetteur vidéo Sunsky. La Mobius la remplace sans
problème...
En parallèle, un petit OSD informe directement dans les lunettes
de l’état de décharge de la batterie. Quand elle
descend vers 9,5 V, il est temps de prévoir l’atterrissage.
Le supplément de poids de cet équipement est d’environ
200 g mais on peut trouver beaucoup plus léger.
Si les hélices ont été équilibrées,
les vibrations sont très faible. Il est quand même préférable
de glisser un petit morceau de mousse sous la caméra qui l’incline
de quelques degrés vers le bas. Les hélices sont moins
visibles et le travail du capteur de la caméra effectue ses réglages
d'après la zone sombre du sol et non pas sur le ciel.
L’émetteur vidéo vient se placer
sur le couvercle du châssis. Il est alimenté par la
batterie de propulsion.
L’image filmée par la GoPro s’affiche
directement dans les lunettes. Le petit OSD qu’on devine à
côté de la carte renseigne sur l’état
de la batterie.
En configuration « lourde » avec l’équipement
de FPV, le Triomini pèse 910 g. La masse supplémentaire
n’est pas un handicap, la puissance disponible permet encore
de bien s’amuser.
En immersion, les sensations changent du tout au tout.
Alors qu’on cherche en général à s'éloigner
des obstacles, à voler loin des copains pour éviter les
collisions… là, c’est tout l’inverse et chaque
élément du décor se met alors à faire partie
du jeu. On s’amuse à passer sous les barrières,
à tourner autour des poteaux, et si on croise un autre modèle,
on pivote aussitôt pour le poursuivre et ne plus le lâcher.
C’est vraiment un plaisir intense, et même après
le retour au sol, on a vraiment le sentiment d’avoir réellement
quitté le plancher des vaches.
Sur certaines vidéos, on devine une infime partie de l’émotion
extraordinaire ressentie lorsqu'on pilote en immersion. Quand on est
aux commandes, le slalom entre les arbres rappelle les poursuites infernales
en pleine forêt d’un épisode de la « Guerre
des étoiles »...
A
vous de jouer !
Les composants suggérés dans cette présentation
sont donnés à titre indicatif et vous pouvez tout à
fait les changer par d’autres équivalents. Pour la carte
électronique, nul doute que le modèle choisi aura encore
évolué dans peu de temps. Il en existe de toutes sortes
et à pratiquement tous les prix, mais les moins chères
ne sont pas forcément les plus mauvaises, et inversement. Je
remercie au passage les développeurs du système MultiWii
qui ont mis leur génie créatif à la disposition
de tous.
Pour ceux qui trouveraient un manque d’originalité ou d’esthétique
au Triomini, ils sont libres de redisigner le modèle, d’agrandir
les bras, de revoir leur disposition. La seule contrainte est de placer
la carte au centre du triangle formé par les moteurs, et de s’assurer
que le centrage se trouve à peu près au même endroit.
Le Triomini est très réactif
et léger aux commandes. Il pèse 700 g avec une batterie
de 2200 mAh qui permet 10 minutes de vol.
En vol stabilisé
sans vent, il est possible de lâcher les manches de l’émetteur
pendant quelques secondes.
L’accélération
peut être très importante dès que l’on
pousse sur le manche de profondeur et qu’on augmente la
puissance.
Le Triomini est très
compact. Les bras sont réduits au plus court sans que les
hélices ne viennent frapper le châssis. Pour un modèle
moins réactif, il est possible de les allonger.
C'est
incompréhensible mais j'ai dû faire une faute de frappe
en rédigeant l'article, et le plus grave, c'est que je l'ai
recopiée dans la fiche technique et sur le plan. Pourtant,
les relectures ont été nombreuses. Mes plus plates
excuses à ceux qui cherchaient le moteur portant la référence
DM2014 1100 kV qui est en fait le
DM 2210 1100 kV
Faut-il
rajouter un récepteur ou bien c'est la carte Multiwii qui
s'en charge ?
Comme
on le voit sur plusieurs photos, dont au moins une est légendée,
il faut bien un récepteur pour équiper ce modèle.
Le tube rouge bien visible sur toutes les photos du modèle,
qui permet de passer l'antenne du récepteur en 41 MHz, ne
laisse planer aucun doute.
Pour l'utilisation faite ici, un simple 4 voies suffit.
Je
ne trouve pas de carte de stabilisation. Connaissez vous un revendeur
de carte de stabilisation ?
Celle
qui a été utilisée sur le modèle présentée
est une
MultiWii MWC Crius SE achetée
en Chine. On la trouve en France chez FPV4Ever
qui propose également de nombreux autres modèles.
J'ai
commencé la construction du Triomini mais je ne trouve pas
les écrous épaulés M3 en alu ?
Les
écrous
prisonniers M3 en alu que j'ai utilisés viennent
de chez A2Pro, comme une bonne partie des autres composants du Triomini.
Vous pouvez demander à votre détaillant de les commander
s'il ne les a pas en stock, ou commander directement sur la boutique
en ligne A2Pro / Promodel. (Voir la liste des liens ci-dessus.)
Où
commander la pièce qui supporte les roulements en impression
3D ?
J'ai
dessiné la pièce et l'ai faite imprimer chez Sculpteo.
Ma pièce présente un tout petit peut de jeu autour
des roulements. Je la redessinerai pour que tout s'ajuste parfaitement.
Chacun est libre de la dessiner et de la faire fabriquer grâce
au service d'impression à la demande proposé par Sculpteo.
Des pièces pour d'autres modèles ont déjà
été réalisées et présentées
sur cette
page.
Je
désirerai avoir plus de détails sur les cartes de
stabilisation Cirius MultiWii : facilité d'emploi, programmation,
qualité de la stabilisation par rapport à des produits
beaucoup plus onéreux comme les NAZA.
Je
suis loin de connaître toutes les subtilités des
produits que j'utilise, et forcément incapable de les comparer
à d'autres que je n'utilise pas. Le plus simple est de
faire appel à la communauté. L'expérience
de chacun permet d'aider les autres. Pour cela, voici quelques
forums français.
Le
matériel que j'utilise est en partie détaillé
sur cette page "vol
en immersion". La caméra utilisée
maintenant est une GoPro2 reliée directement par une prise
Jack sur l'émetteur vidéo. La vidéo est enregistrée
sur la carte mémoire et l'image est diffusée en même
temps dans les lunettes. Attention, il existe une règlementation
sur les systèmes d'émission/réception vidéo.
Renseignez-vous sur ce qui est autorisé en France (ou dans
votre pays).
Jusqu'à
quel distance peut voler le Triomini ?
En
vol à vue, ce sont les yeux du pilote qui gèrent la
distance. En effet, le modèle est petit et la visualisation
de la configuration peu ordinaire font qu'on ne s'éloigne
jamais très loin. J'estime ne pas avoir volé sur un
rayon dépassant 100 m pour rester prudent.
En vol en immersion, on peut aller plus loin (il existe une règlementation
française à ce sujet). Mais le Triomini n'est certainement
pas la meilleure machine pour effectuer du vol de distance (long
range). Il existe d'autres modèles capables d'emporter des
batteries de capacité plus importantes. Cependant, en parcourant
une ligne droite de 4 minutes et autant pour rentrer, ce que permet
la batterie de 2200 mAh, on pourrait déjà aller bien
loin, sans doute trop pour la portée radio et celle de la
vidéo...
Le vol que je préfère avec cette machine est le vol
de proximité en jouant avec les obstacles, comme on peut
le voir sur les vidéos en haut de page.
Pouvez-vous
me renseigner sur l’artisan qui a découpé au
laser les pièces en contre-plaqué.
L'artisan
qui m'a fait la découpe ne souhaite pas commercialiser ce
genre de pièces au coup par coup, il m'a expliqué
que ça n'est pas assez rentable. (Sélection et mise
en place du matériau, réglages de la machine puis
préparation du paquet, envoi à la Poste... Trop d'étapes
chronophages qui ne lui permettent pas de gagner sa vie. Il ne souhaite
pas non plus faire de stock pour un produit qu'il ne va pas promouvoir.
Bref, il m'a fait comprendre qu'il fallait passer des commandes
groupées comme je l'avais fait pour mon proto. J'avais fait
découper des pièces pour d'autres modèles très
différents en même temps.)
Si
je reçois plusieurs demandes, j'essaierai peut-être
de passer une commande groupée (j'ai quelques autres pièces
à faire découper) et je me chargerai de les expédier.