Après les hélicos birotors
de poche qu’on a vus fleurir chez tous les fabricants, c’est
maintenant au tour des tricoptères, quadricoptères
et même hexa ou octo d’être à la mode.
Il faut dire que les cartes électroniques équipées
de 3 gyroscopes ont fait des progrès énormes et
qu’on en trouve de toutes sortes sur le web, toutes prêtes
ou à souder soi-même.
Première
séance de vol en immersion dans un parc.
La
cellule de ce quadricoptère est faite de matériaux
courants. Le Quad 9 peut donc être construit par tous.
La configuration choisie est en « X », avec
2 moteurs dirigés vers l'avant.
C’est en revenant d’Inter-Ex
2010 que j’ai eu envie de m’y mettre aussi. J’avais
imaginé que ces multirotors avaient le même comportement
que les petits birotors s'apparentant à des jouets : tellement
autostables qu’il n’est pas nécessaire de savoir
piloter pour les diriger, qu’il faut presque lutter pour
les faire avancer et donc qu'on en a vite fait le tour.
La réalité est toute autre : après avoir
vu la précision du vol, les translations rapides, les figures
de voltige réalisées pa certains modèles,
sans oublier la charge utile qu’il est possible d’embarquer
pour effectuer des prises de vues aériennes en photo et
vidéo, j'étais séduit et il me fallait franchir
le pas...
Caractéristiques
techniques
Quelques
adresses
Nom
: Quad 9
Envergure : 49 cm
Longueur : 49 cm
Poids : 950 g (avec 3S 2 650 mAh)
Moteurs : 4 x RC Timer CF-2822/14 1 200 kv
Hélices : 2 x Gaui 8 pouces, pas à droite
2 x Gaui 8 pouces, pas à gauche
Contrôleurs : 4 x RC Timer 30 A
Module de stabilisation : FeiyuTech FY-90Q
Récepteur : 6 voies
Batterie : Lipo 3S de 1 800 à 3 200 mAh
Le plan du Quad
9 est téléchargeable échelle 1 en cliquant
sur les images ci-dessus. Format 55x110 cm (725 Ko) ou sous
forme de feuilles A4 à assembler (2 Mo).
Internet
est ton ami...
Pour tout hélicoptère, l'un des
principaux problèmes à régler reste celui
de la stabilité. Pour qu'un quadrirotor puisse voir le
jour, il fallait concevoir un module capable de piloter 3 gyros
(roulis, tangage, lacet) et d'agir sur les 4 contrôleurs
associés aux moteurs. La carte KK polonaise est réputée
chez les multicoptéristes et est proposée en kit
à souder soi-même. (C’est à la portée
de toute personne sachant manier un fer à souder, elle
ne comporte que des composants standard. Ca se complique un peu
pour y souder les tout petits gyroscopes livrés séparément.)
Elle est programmée par l’artisan qui la produit,
pour des tricoptères, quadricoptères, ou d'autres
modèles plus complexes. Depuis la rédaction de cet
article, des tas d'autres cartes sont sorties et il n'est plus
nécessaire de les souder soi-même.
N'ayant plus la patience d'attendre que le stock en rupture soit
réapprovisionné chez un importateur français,
j'ai jeté mon dévolu sur le module chinois FY-90Q
de FeiyuTech commandé en Grèce (!), encore peu répandu
(fin 2010) mais néanmoins très efficace, qui regroupe
l’ensemble de l’électronique sous un boîtier
compact et léger. Ce module qui comporte 3 gyroscopes et
3 accéléromètres est gros comme un récepteur
classique et pèse 20 g. Cette électronique détecte
tout changement d'attitude du modèle et transmet les signaux
pour ajuster la vitesse des moteurs afin de maintenir la stabilité
et l'équilibre. Le « cerveau » étant
déniché, il reste à lui confier une cellule
sur mesure.
«
+ » ou « X » ?
Avec l’utilisation d’un FY-90Q,
deux possibilités s’offrent à vous pour la
configuration :
- Soit on réalise un modèle en croix (+), c’est
ce qui se rapproche le plus de la forme d’un avion, avec
un moteur placé vers l'avant, un autre à l'arrière,
et un de chaque côté.
- Soit en X, avec deux moteurs vers l'avant et deux vers l'arrière.
Cette configuration un peu moins facile à visualiser est
généralement utilisée par ceux qui souhaitent
effectuer des prises de vues embarquées : l’avant
est parfaitement dégagé, seules les extrémités
des pales peuvent apparaître de part et d’autre de
l’écran. C'est la solution qui a été
retenue pour notre Quad 9.
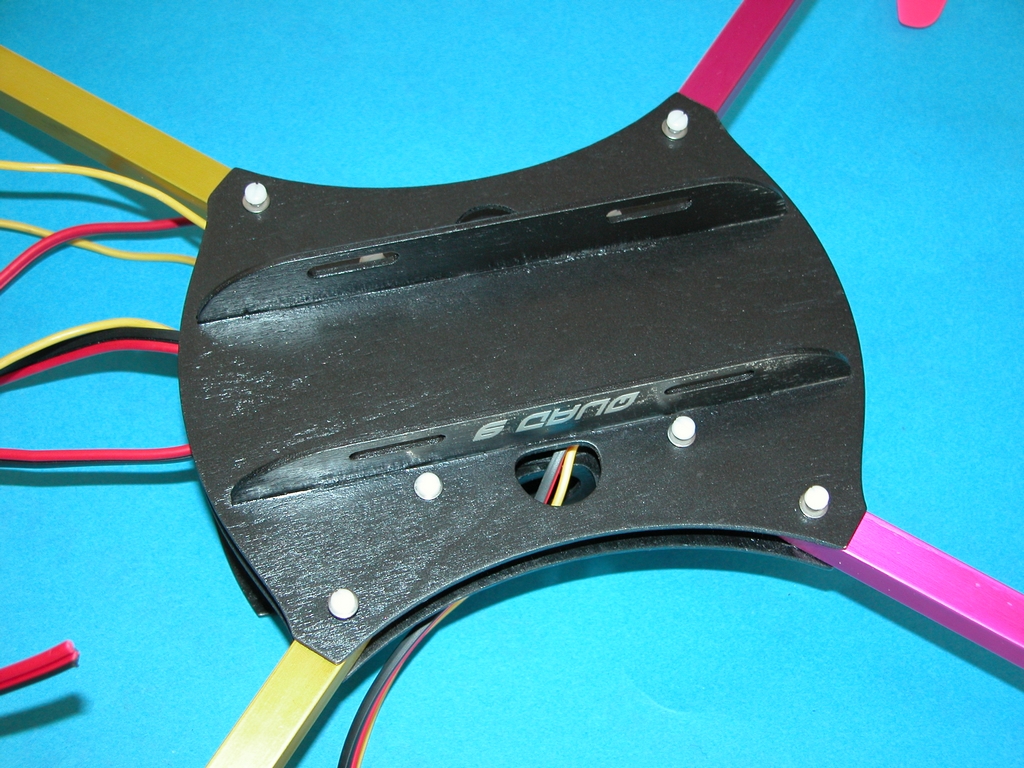
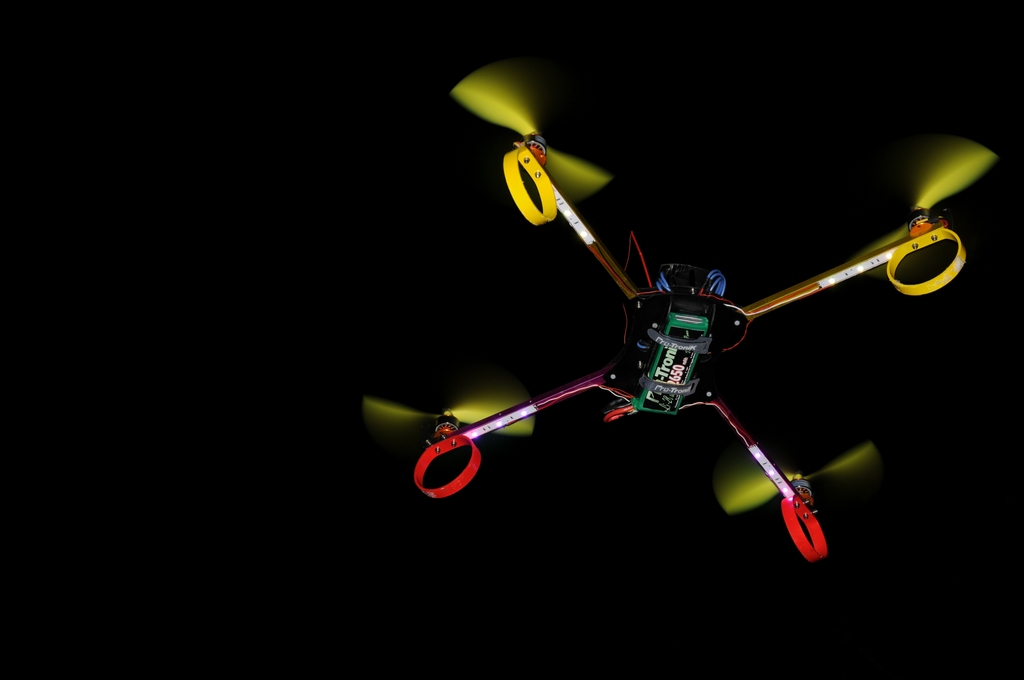
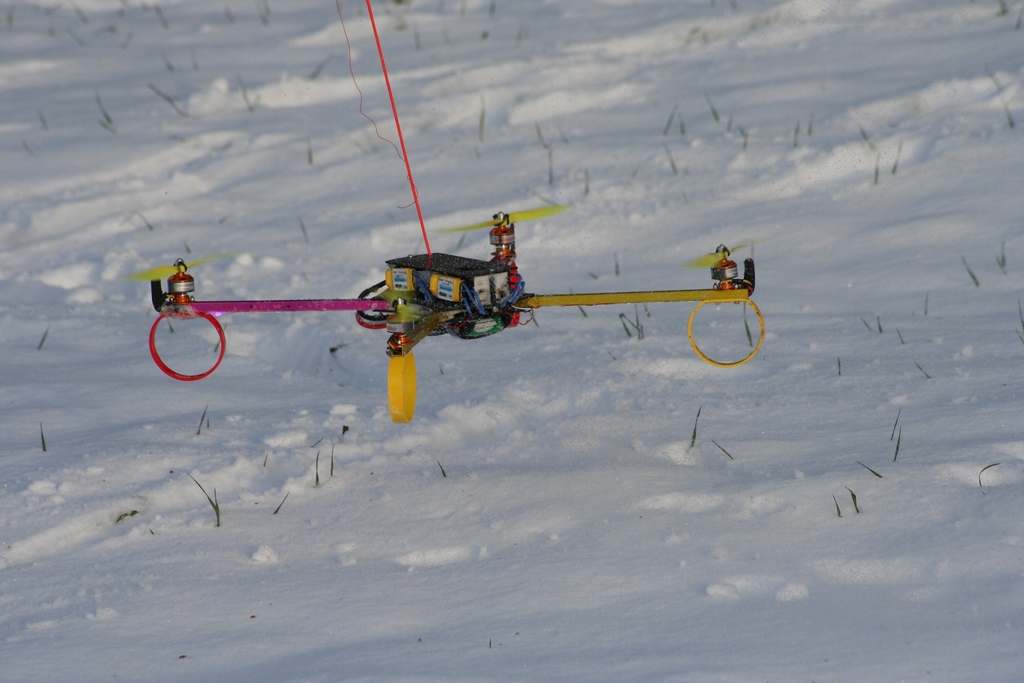
Le Quad 9 vole
en X, c'est-à-dire avec deux bras dirigés
vers l'avant. La couleur des bras et des hélices
permet d'identifier plus facilement l'avant de l'arrière.
Pour le stockage
ou le transport, les bras se replient en retirant 4 vis.
Pratique !
Moteurs,
contrôleurs et hélices
Les 4 moteurs sont fixés sur un châssis
en croix rigide, le pilotage est assuré uniquement par
leur changement de régime. Le couple moteur est annulé
en utilisant des moteurs contrarotatifs. Diamétralement
opposés, deux tournent dans le sens des aiguilles d’une
montre, les deux autres en sens inverse. Il faut donc utiliser
des hélices à pas inverse sur deux d'entre eux.
Heureusement, les fabricants se sont déjà occupés
de fournir des lots de 4 hélices, avec 2 de chaque. Les
plus courantes sont les Gaui 8 pouces que je commande chez Arrena.
Par la même occasion, de leds de couleurs vendues en rouleau
permettront le vol de nuit.
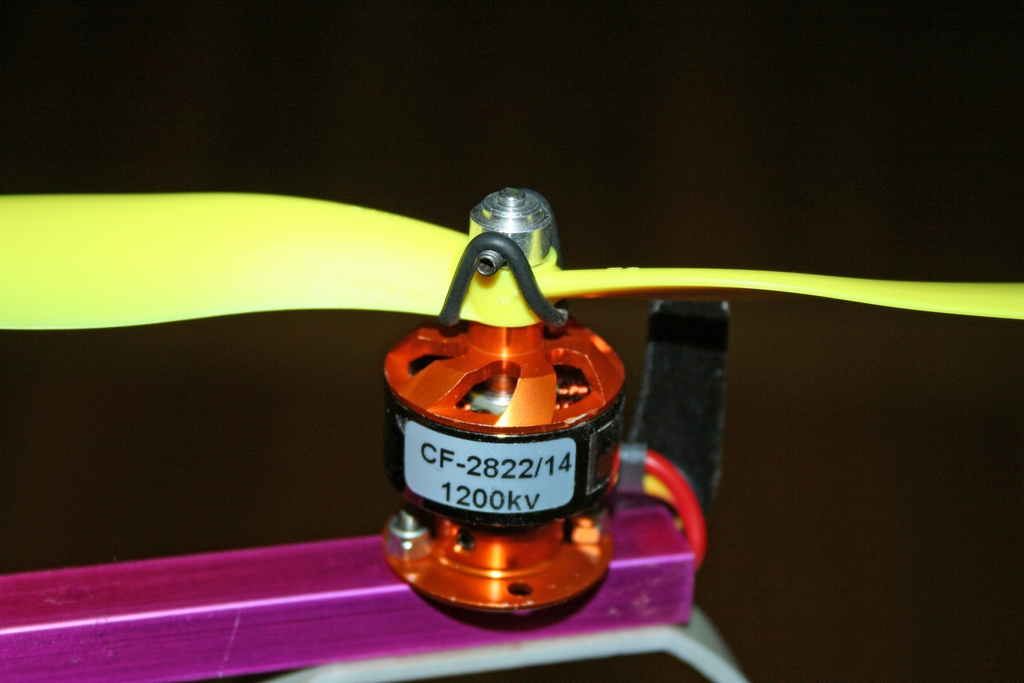
Pour la motorisation, j'ai choisi le très répandu
RC Timer CF-2822/14 1 200 kv qui pèse 48 g et le contrôleur
20 A de la même marque. Des moteurs de masse équivalente
avec un kv de 1 100 à 1 400 conviendront également.
Ne pas oublier de commander 4 prop-savers par la même occasion.
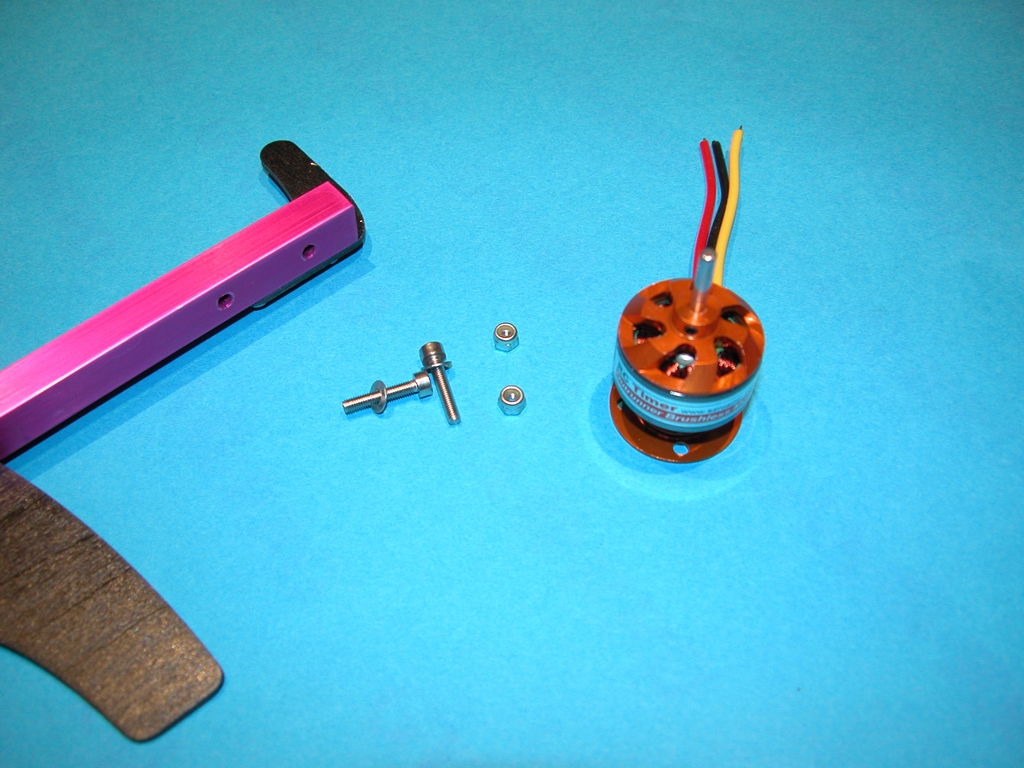
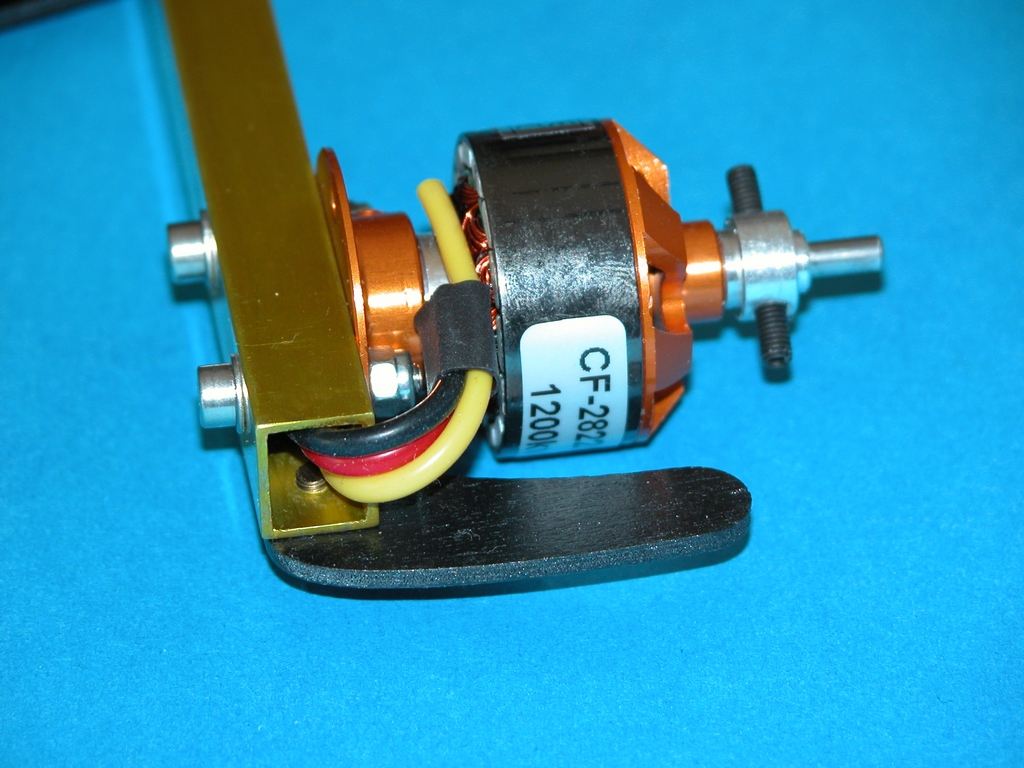
Le moteur RC Timer CF-2822/14 de
1200 kv est robuste et bon marché, et bien assez puissant
pour notre modèle. Il entraîne une excellente
hélice Gaui 8"x4". Le moyeu doit être
élargi pour s'adapter au porte hélice. Ces hélices
encaissent très bien les chocs, on en casse très
peu malgré des retours au sol imprévus qui peuvent
être violents.
Châssis
central
Même si quelques kits commencent à
apparaître, j'ai préféré réaliser
une cellule avec des matériaux faciles à trouver
dans le commerce et pouvant être travaillés avec
les outils de l'atelier. La base du châssis est en contre-plaqué
aviation de 2 mm. Deux platines enserrent les 4 bras en profilé
aluminium de 10 x 12 mm de section. En dessous, deux montants
verticaux permettent de fixer l'accu et de le protéger
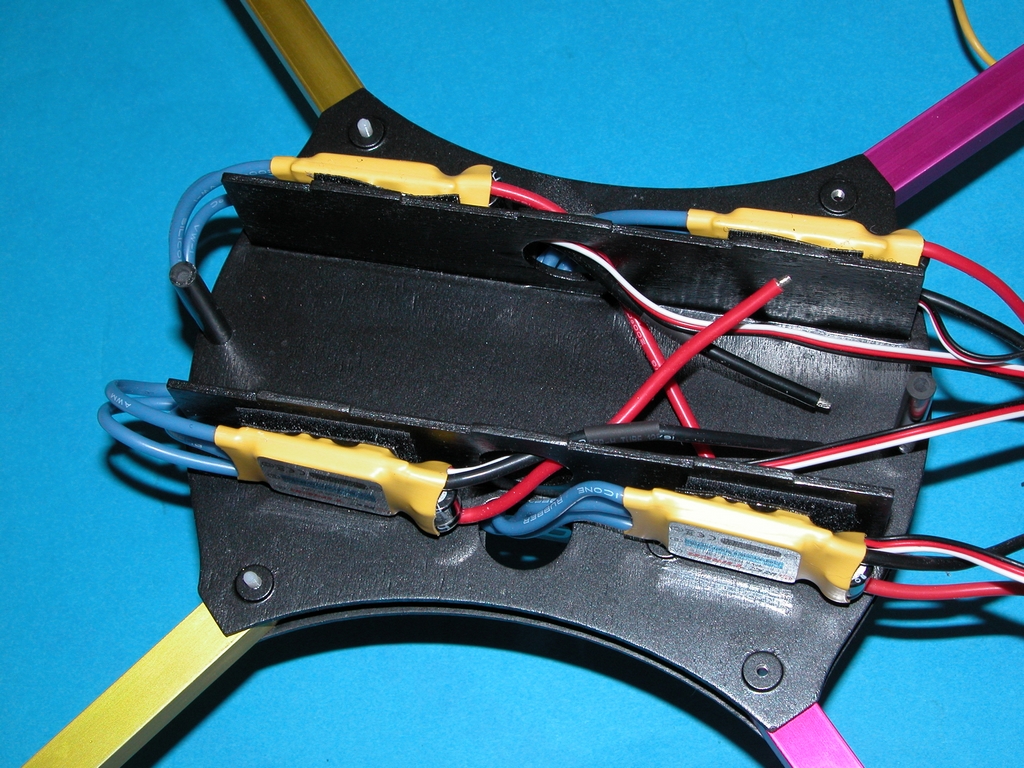
des retours au sol accidentels. Au-dessus, deux autres montants
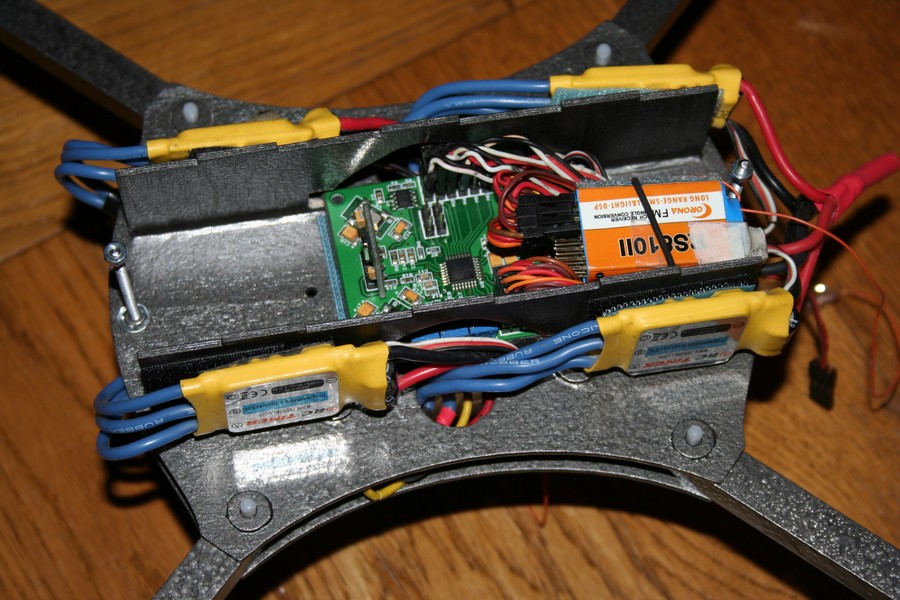
reçoivent les 4 contrôleurs. Entre ces montants,
le récepteur et le module FY-90Q sont parfaitement protégés.
L'ensemble est recouvert par une autre platine.
La platine centrale reçoit des inserts en aluminium, au
niveau de chaque vis. Il dépassent légèrement
de la platine, il est donc nécessaire de les limer jusqu'à
ce qu'ils soient affleurants.
Tous les collages sont effectués à l'époxy
2 composants.
Après collage des morceaux, l'ensemble est recouvert de
peinture en bombe noire.
Bras
supports-moteurs
Les bras en aluminium proviennent du supermarché
de bricolage. Leur section peut être de 10 x 10 ou mieux,
de 10 x 12 mm afin de faire courir le câblage électrique
à l'intérieur, c'est beaucoup plus joli que de le
voir pendre à l'extérieur, et les contrôleurs
placés au centre évitent de trop éloigner
les masses. Une barre de 120 cm suffit pour réaliser les
4 bras de 30 cm. Ceux qui souhaitent un modèle plus compact,
donc plus vif, pourront se contenter d'une barre de 100 cm coupée
en 4.
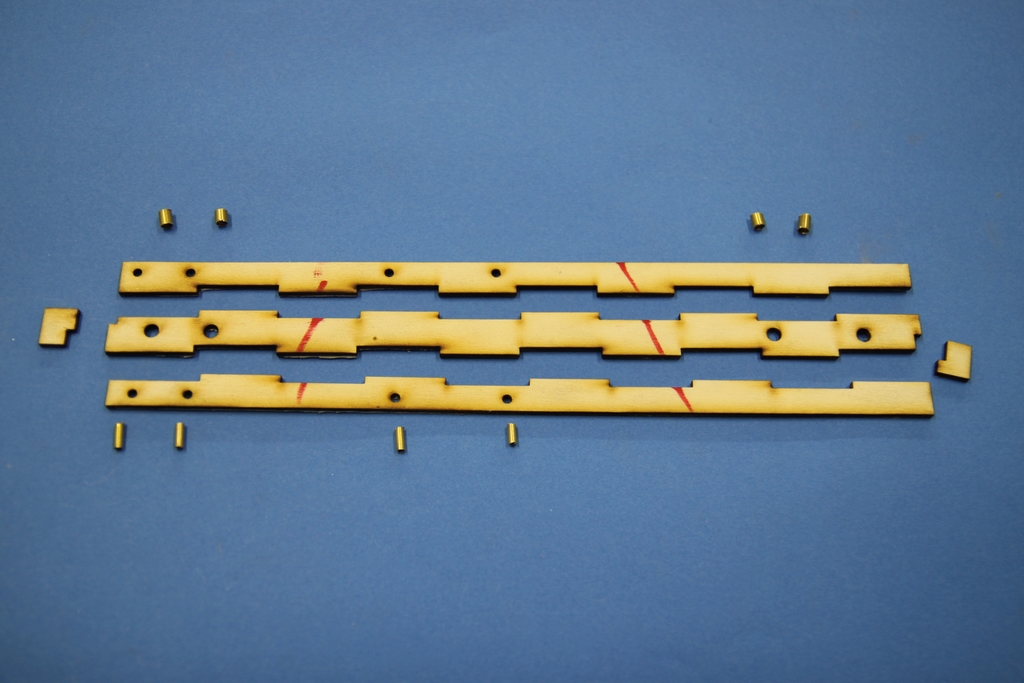
Ces morceaux de bois servent à
confectionner un gabarit de perçage pour les bras en
aluminium. Pas indispensable mais bien pratique pour travailler
régulièrement, et puis ça dépanne
les copains. Le gabarit forme une boîte dans laquelle
on glisse les profilés un à un. Les trous sont
manchonnés par des tubes en laiton.
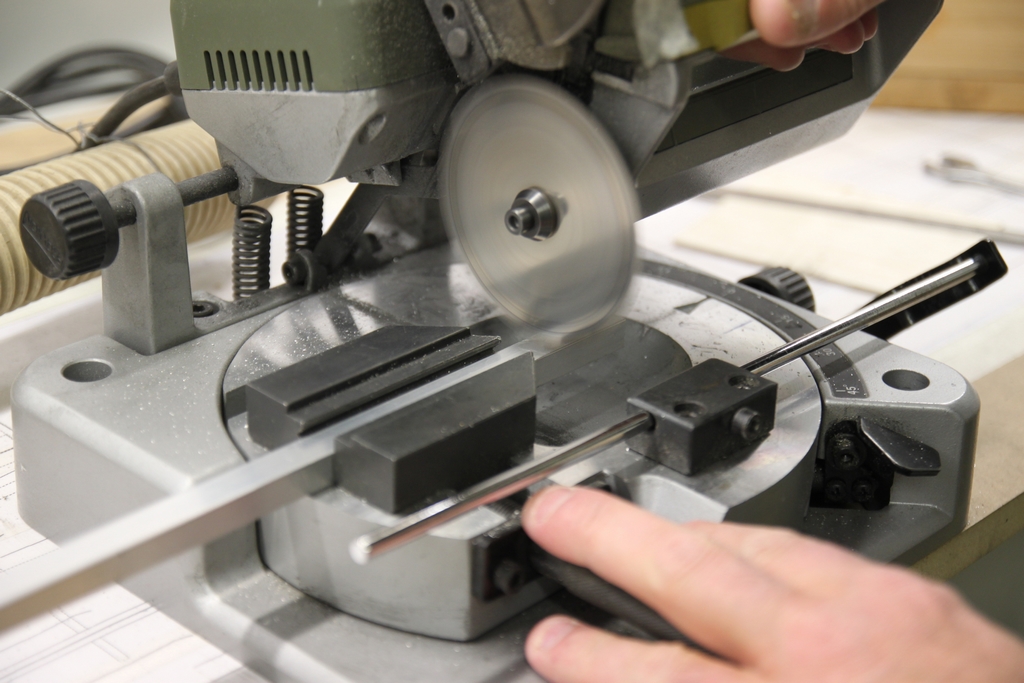
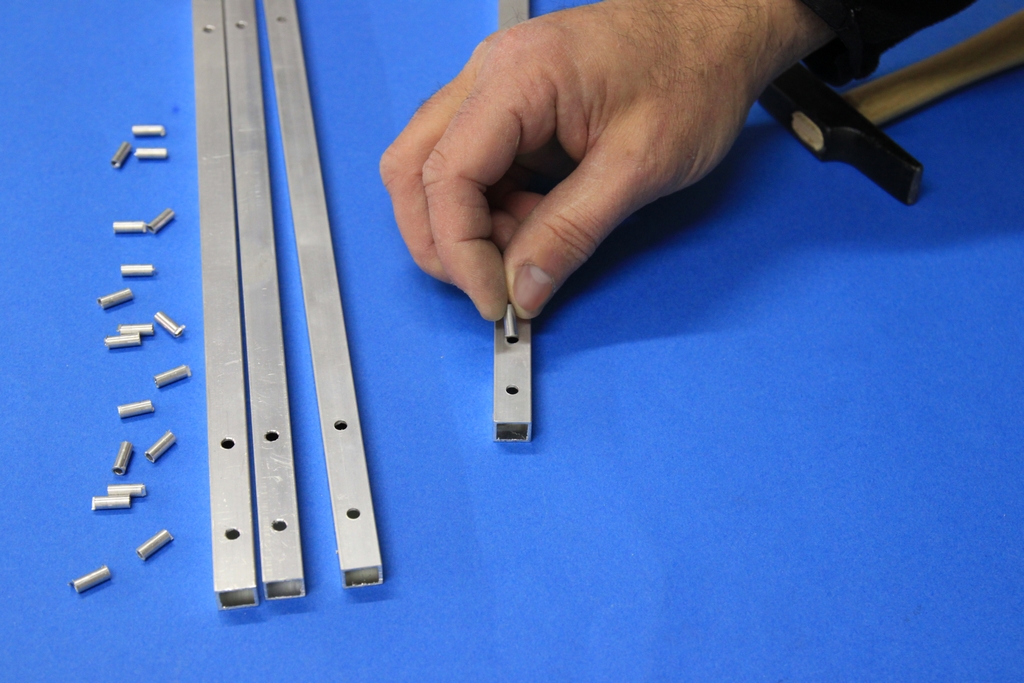
Tronçonnage des profilés rectangulaires
en aluminium qui constituent les bras.
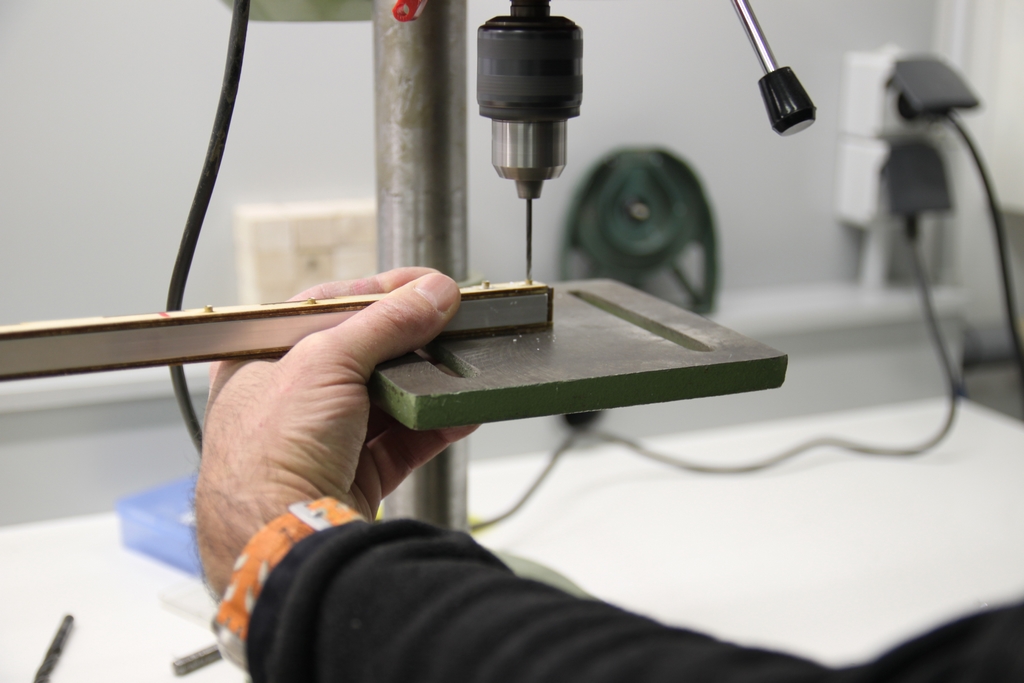
Les trous sont percés bien verticalement
avec une perceuse à colonne.
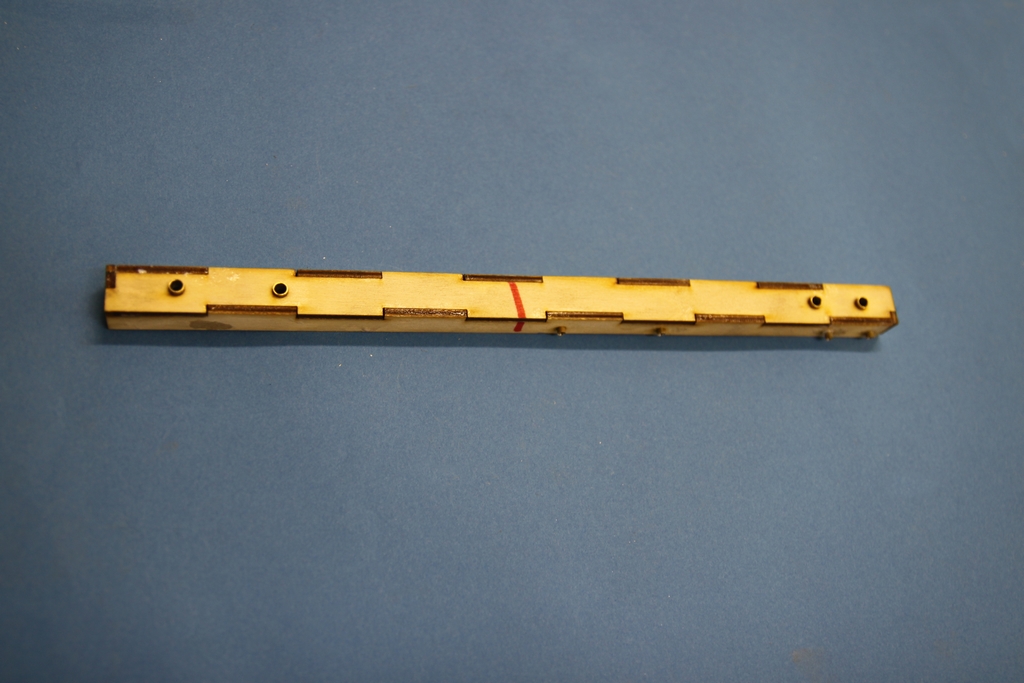
Une fois les 4 tronçons découpés
et ébavurés, il faut les percer de part en part
afin d'y fixer les moteurs d'un côté et le châssis
de l'autre. Pour effectuer des perçages identiques, une
« boîte » servant de gabarit a été
confectionnée en contre-plaqué. Les quelques instants
passés à la fabriquer permettent d'obtenir un résultat
identique sur chaque bras, et elle rendra éventuellement
services aux copains qui ne manqueront pas de vous emboîter
le pas. Sur cette boîte, les trous sont manchonnés
avec des petits morceaux de tube laiton afin que la mèche
de la perceuse ne vienne pas prématurément ovaliser
les trous. Utiliser de préférence une perceuse à
colonne pour effectuer des trous de 4 mm bien axés.
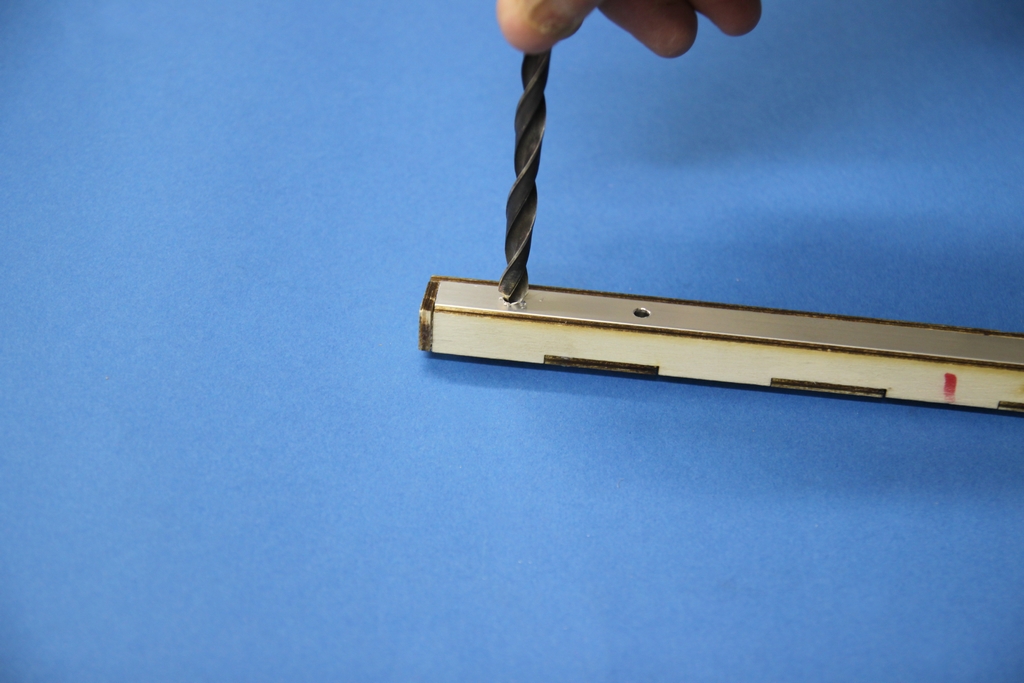
Les trous sont ébavurés
et légèrement chanfreinés à l'aide
d'une grosse mèche. Pour
éviter d'endommager le câblage qui passe à
l'intérieur, les trous sont manchonnés avec
des morceaux de tube aluminium.
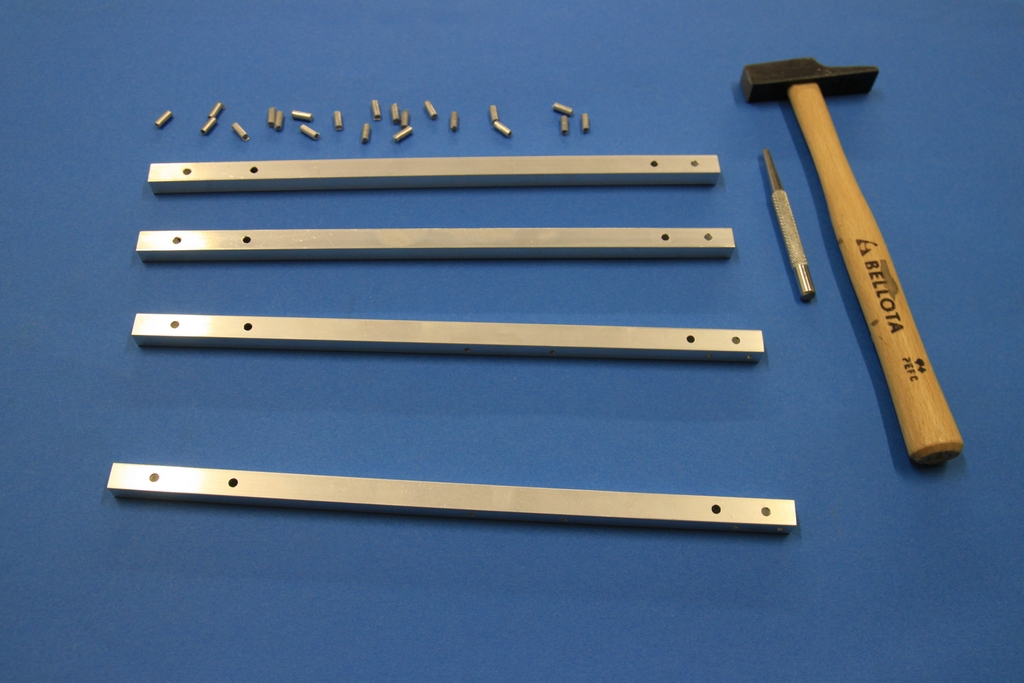
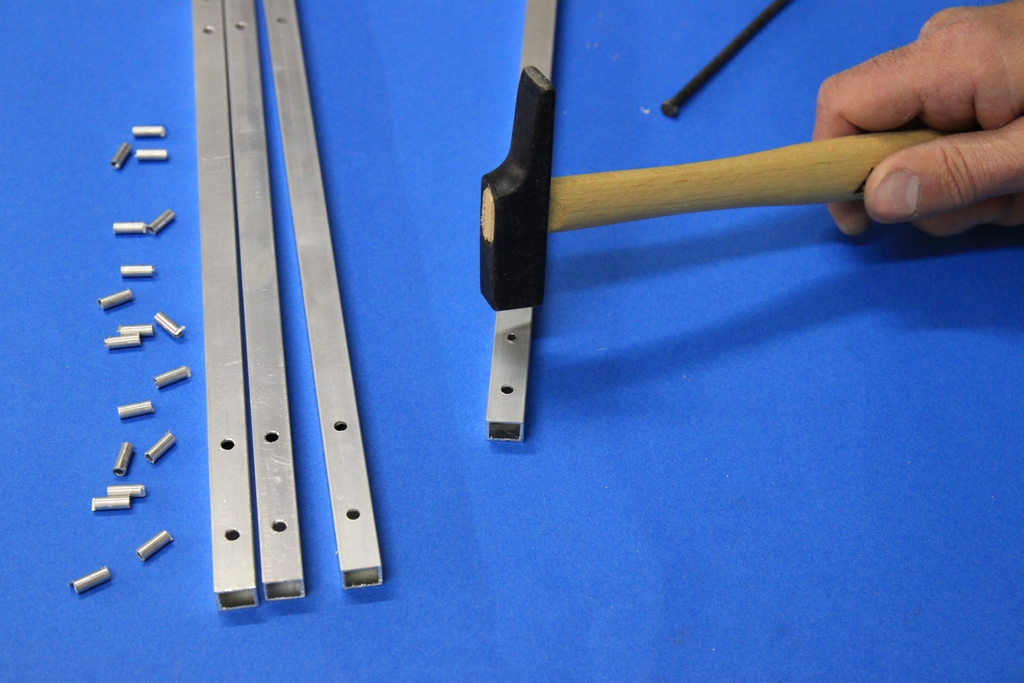
Un petit coup de marteau suffit pour les mettre
en place.
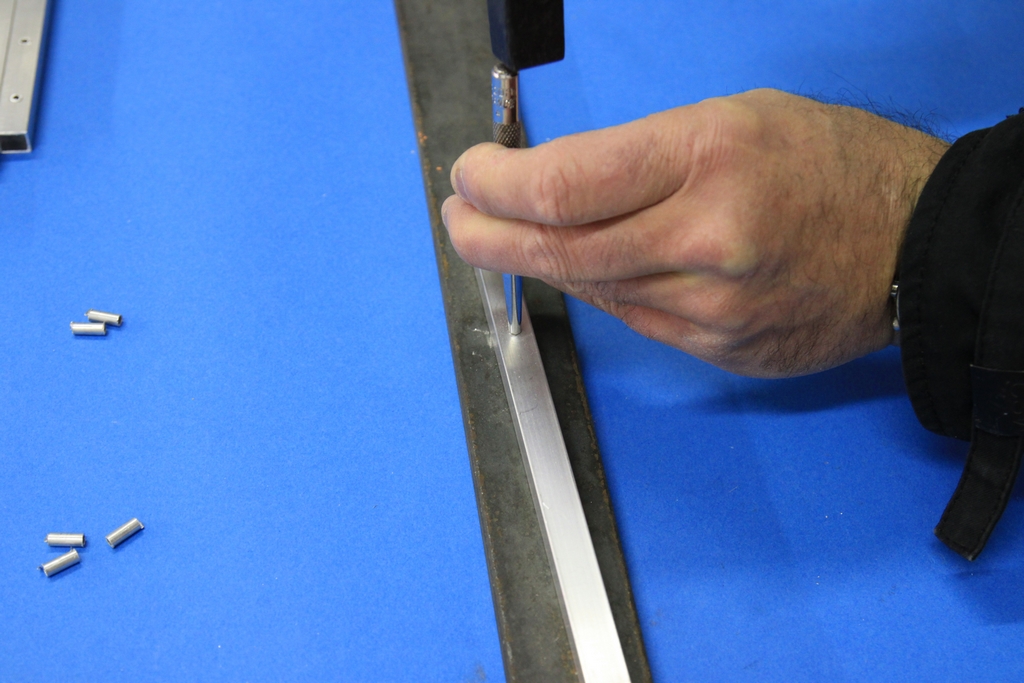
Un coup de poinçon permet d'élargir
le bord et de les sertir en place.
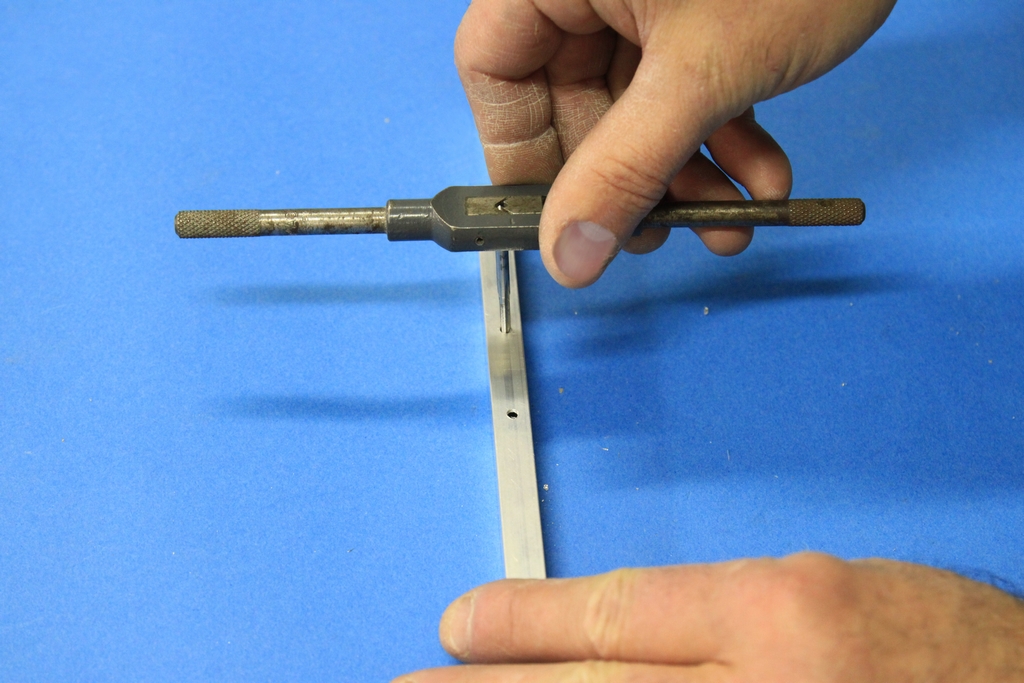
Côté extérieur, les trous
recevant les équerres de protection des fils doivent
être taraudés.
L'aluminium se peint mal. Il est préférable
de l'anodiser, l'opération n'est pas très compliquée.
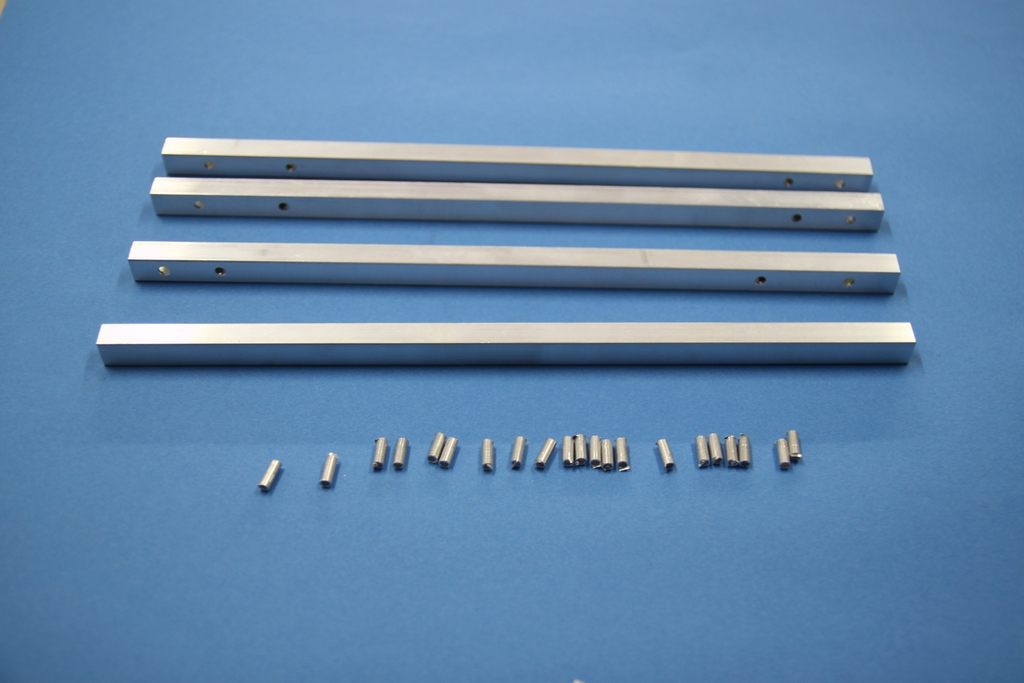
Pour éviter l'écrasement mais
surtout pour ne pas endommager les câbles passant à
l'intérieur, ces barres sont manchonnées au niveau
de chaque trou à l'aide d'un morceau de tube alu de 4 mm.
Le tube est coupé en tronçons de 10 mm qui sont
ensuite rentrés en tapant délicatement avec un marteau.
Une fois en place, les bords sont écartés avec un
poinçon.
Pour ne pas
endommager les fils électriques du moteur lors d'un
choc latéral, une encoche en demi-rond en bout de
tube permet de les faire passer.
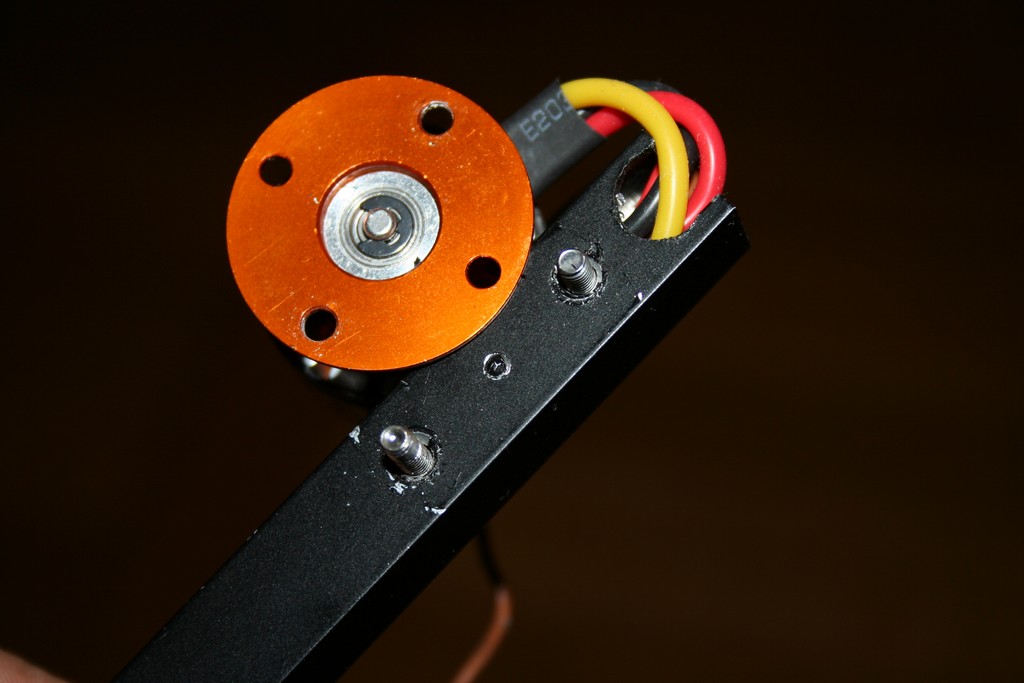
Sur certains
moteurs, l'axe dépasse très légèrement
au niveau du pied, venant appuyer sur le bras du quad, ce
qui dégrade les performances voire rend le vol stabilisé
impossible. Afin d'éviter ce genre de mésaventure,
un trou supplémentaire est percé à
ce niveau.
Alternative à
l'anodisation
Les bras en aluminium brut ne sont
pas très jolis si on les laisse tels quels.
Le meilleur traitement de surface pour l'alu reste l'anodisation,
qui peut être faite "à la maison" avec
un peu de précaution. Il existe cependant une alternative
plus simple en utilisant de la peinture. Mais celle-ci accroche
très mal sur ce matériau.
Seule la Tamiya PS transparente donne de bons résultats
(merci Olivier pour l'excellent tuyau...). Elle reste très
légèrement souple. Posée en couches fines,
le résultat obtenu est très proche de l'anodisation,
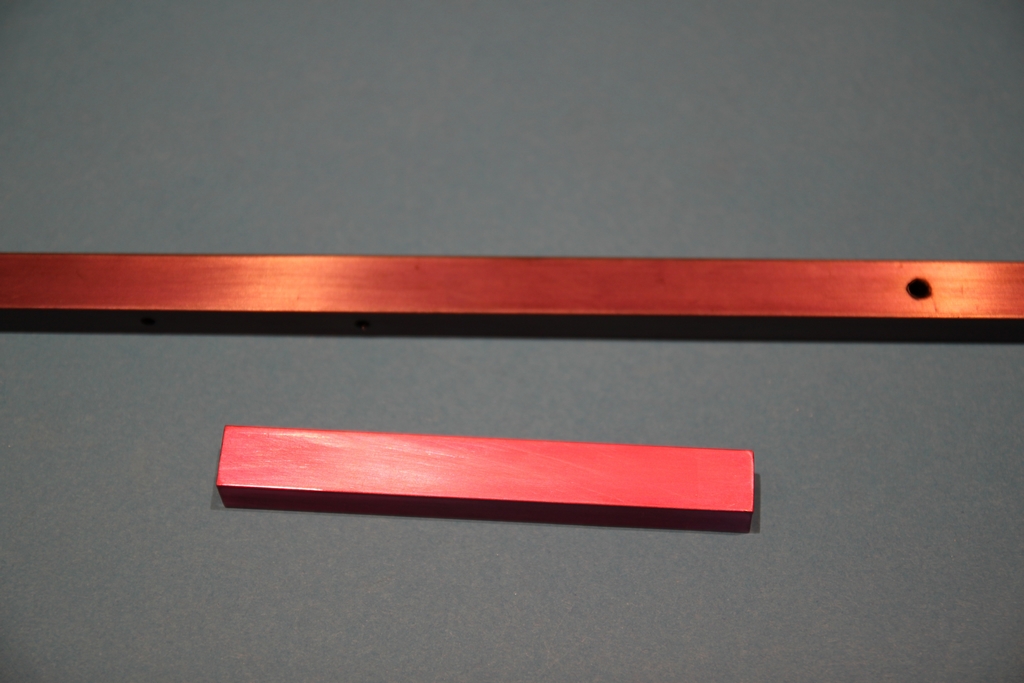
comme on peut le voir ici.
La couleur du bras ou du patin (sous couche blanche posée
avant sur l'anneau en PVC) est très proche de celle
du moteur. Pourtant, les deux premiers sont peints avec de
l'orange transparent alors que la cage du moteur est anodisée.
Anodisation
L'aluminium brut n'est pas très joli.
Tout change lorsqu'il est anodisé. Ce traitement de
surface permet de le décorer et rend sa surface très
dure, ce qui le protège de la corrosion.
Les pièces en aluminium sont dans un premier temps
nettoyées, par ponçage à l'eau au papier
émeri très fin. On utilise des gants en latex
pour éviter de les marquer avec les doigts.
Elles sont ensuite suspendues par un fil d'aluminium dans
un bain composé de 2/3 d'eau et de 1/3 d'acide sulfurique.
Ce fil est raccordé à la borne positive d'une
alimentation stabilisée. Une chute d'aluminium ou de
graphite est raccordée sur la borne négative
et trempe aussi dans le bain, sans toutefois toucher la pièce
à anodiser, ce qui créerait un court-circuit.
A la mise sous tension, de fines bulles se produisent, beaucoup
plus sur l'anode que sur notre pièce, c'est normal.
Laisser mijoter durant 30 à 60 minutes. Pendant ce
temps, préparer la teinture avec de l'encre mélangée
à de l'eau. Des cartouches d'encre d'écolier
conviennent très bien et offrent une grande variété
de couleurs. Des colorants alimentaires peuvent également
convenir. Débrancher l'alimentation, sortir les pièces
délicatement et les rincer à l'eau froide, toujours
sans les toucher avec les doigts. Mettre les pièces
dans un bac métallique et verser la teinture. Les pièces
doivent être complètement recouvertes. Commence
alors la « cuisson » sur le gaz. L'eau doit à
peine frémir. Les pièces sont régulièrement
retournées pour bien prendre la couleur. Après
quelques minutes, elles sont rincées à l'eau
et sont prêtes à l'emploi.
Il est préférable de réaliser quelques
essais avant pour être sûr que le résultat
correspond bien aux envies. Durant toutes ces étapes,
travailler dans un local aéré et rester très
prudent avec l'acide.
Le câblage électrique est glissé
dans les bras, puis les moteurs sont soudés d'un côté.
De l'autre, prévoir un peu de marge pour permettre aux
bras de se replier. Assembler les platines par vissage en emprisonnant
les bras. Les vis au niveau des axes (voir plan) peuvent être
en acier, les autres en nylon pour faire office de fusible en
cas de choc. Souder les contrôleurs et les paramétrer
l'un après l'autre, tous de la même manière,
en ajustant les fins de courses et en supprimant le frein.
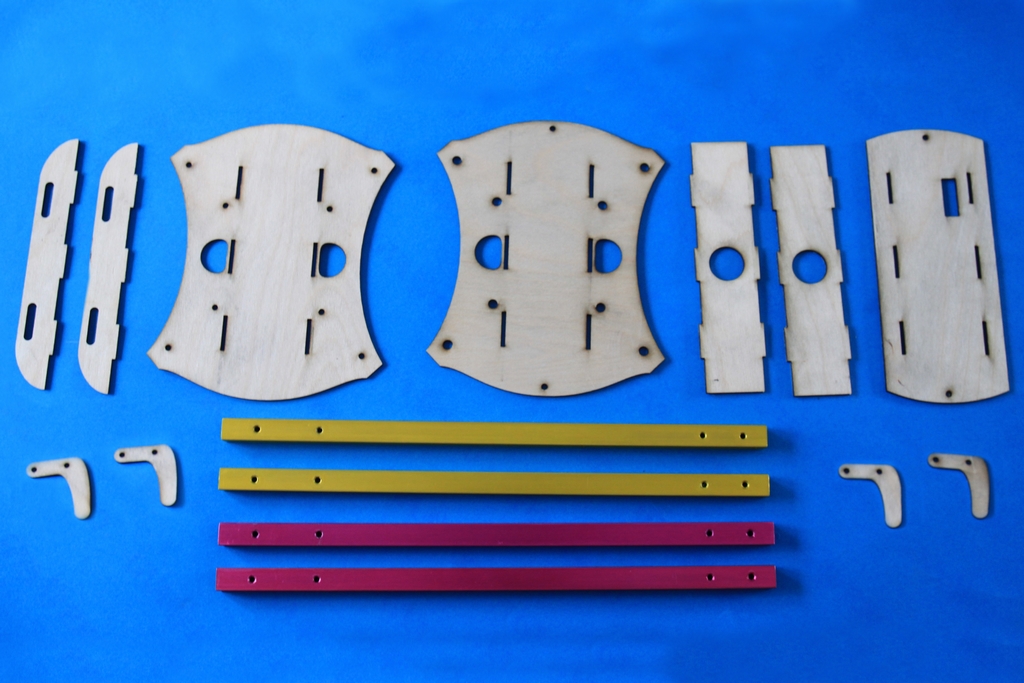
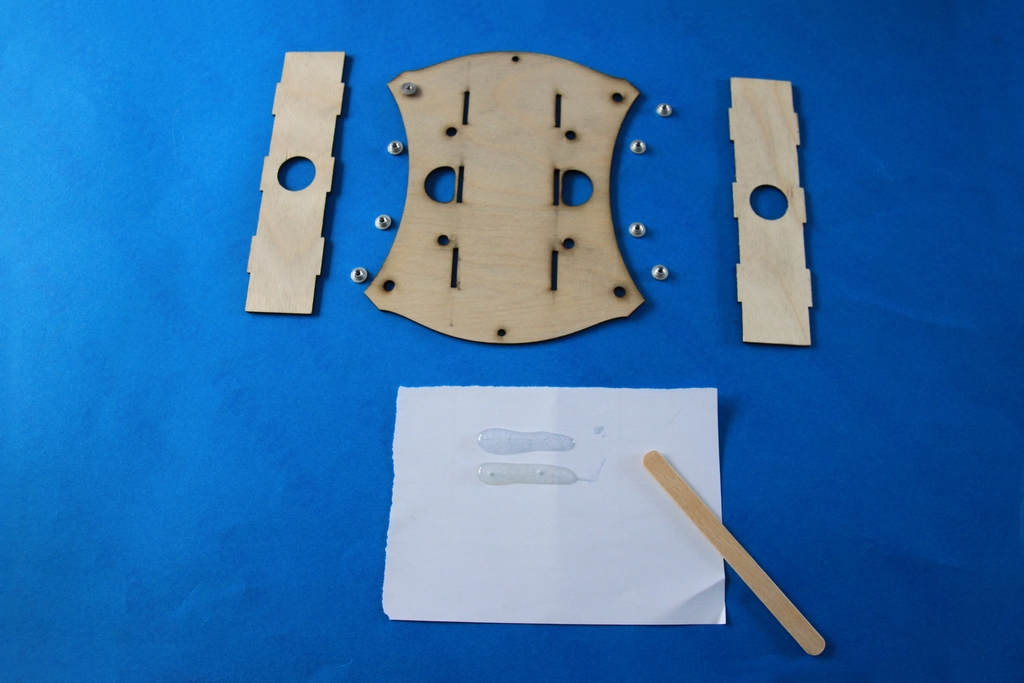
Tous les éléments
composant le châssis sont prêts pour l'assemblage
:
du contre-plaqué et des profilés en aluminium.
Les morceaux de bois sont collés à
l'époxy. La platine centrale reçoit des inserts
métalliques.
La platine inférieure est renforcée
par deux cloisons qui serviront à maintenir la batterie.
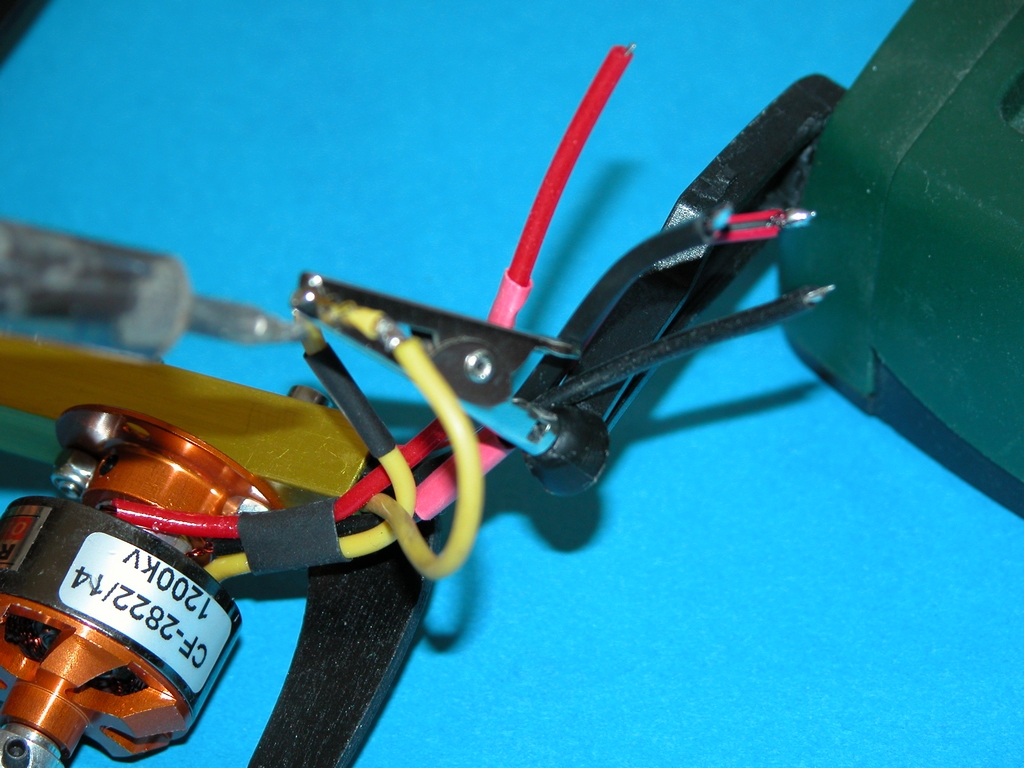
Le câblage électrique
passe dans les profilés en aluminium. Il faut effectuer
de nombreuses soudures.
L'équerre en contre-plaqué
évite d'endommager les fils électriques en
cas de choc latéral mais on peut faire autrement
en découpant un passage en bout de tube. Voir
ici.
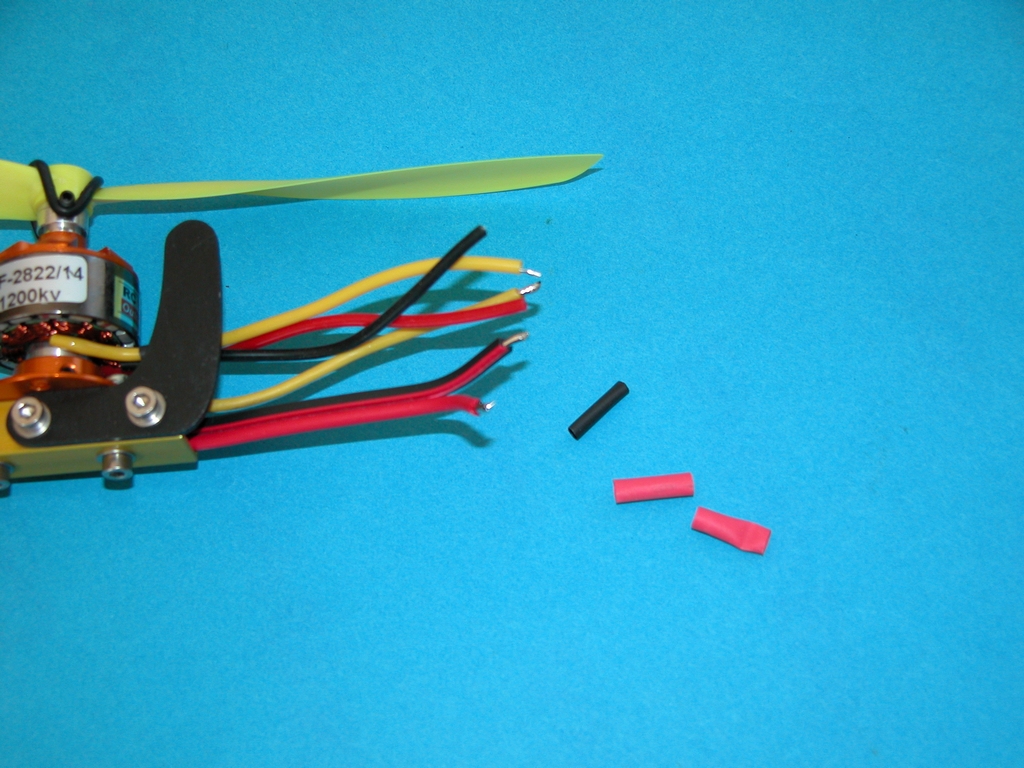
Avant de rétracter
la gaine thermo sur les fils, il faudra s'assurer du sens
de rotation de chaque moteur.
Il
est préférable d'utiliser des vis en nylon
sur le châssis. Elles feront fusible en cas de crash
et pourront être facilement remplacées..
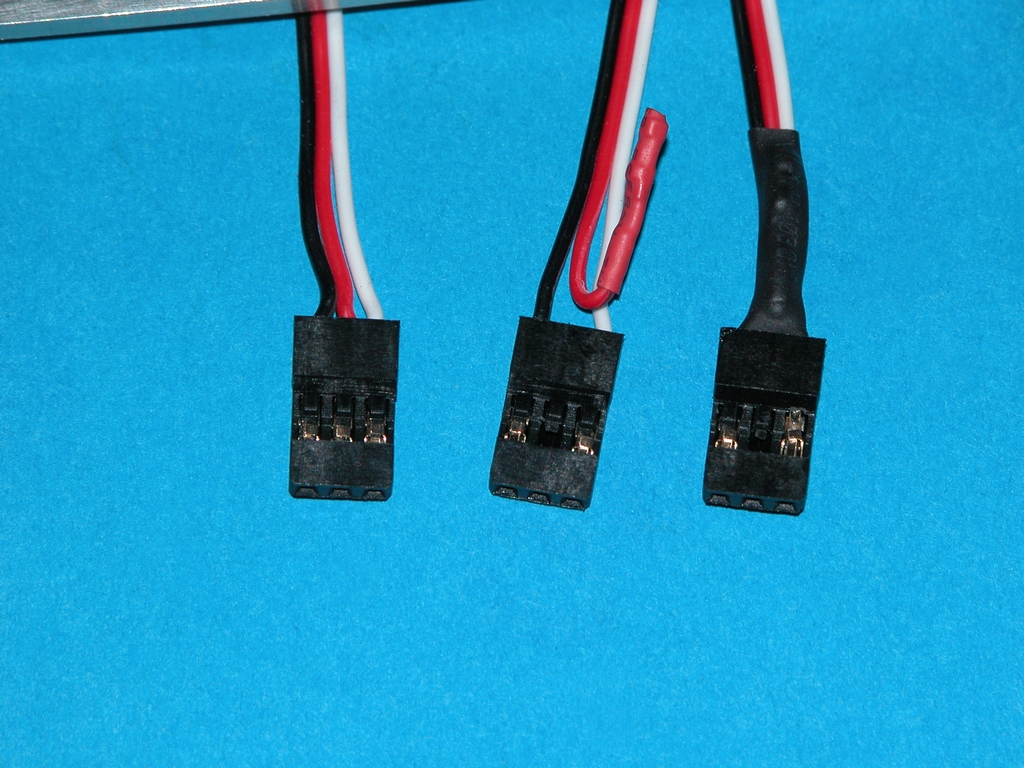
Un seul BEC doit être conservé,
les trois autres seront désactivés en retirant proprement
le fil rouge des prises allant au récepteur.
Les 4 fils rouges des contrôleurs seront regroupés,
les 4 fils noirs également, chacun recevant la prise adaptée
à l'accu de propulsion.
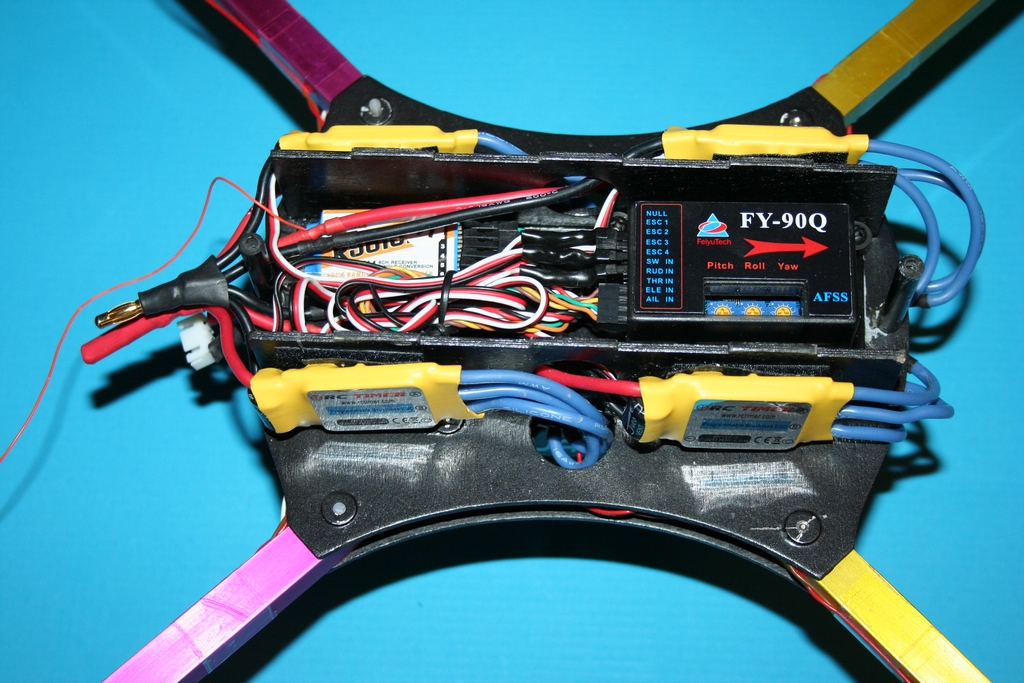
Le module de stabilisation FY-90Q est placé avec la flèche
rouge dirigée vers l'avant. Une platine suspendue est livrée
avec, elle absorbe très efficacement les vibrations. Ne
pas oublier le petit switch livré qui permet de piloter
notre Quad monté en « X ». Suivre les indications
de la notice pour raccorder les contrôleurs et les câbles
allant au récepteur. Ce dernier doit comporter au moins
5 voies. Il est placé à l'arrière de la platine,
l'antenne guidée dans une gaine afin qu'elle ne se prenne
jamais dans une hélice.
La batterie vient se glisser dans son logement, sous la cellule.
Elle est immobilisée avec du velcro.
Sur 3 des contrôleurs,
il faut enlever le système BEC en retirant le fil
rouge. Ne pas couper le fil pour que le contrôleur
puisse être utilisé sur un autre modèle.
Les contrôleurs sont maintenus sur les platines verticales
avec du velcro adhésif.
Le module de
stabilisation FeiyuTech FY-90Q est très efficace,
compact et léger. Il est livré avec sa platine
suspendue.
Le module est
monté souple sur sa platine,
suivi du récepteur 6 voies. Les fils sont regroupés
pour plus de clarté.
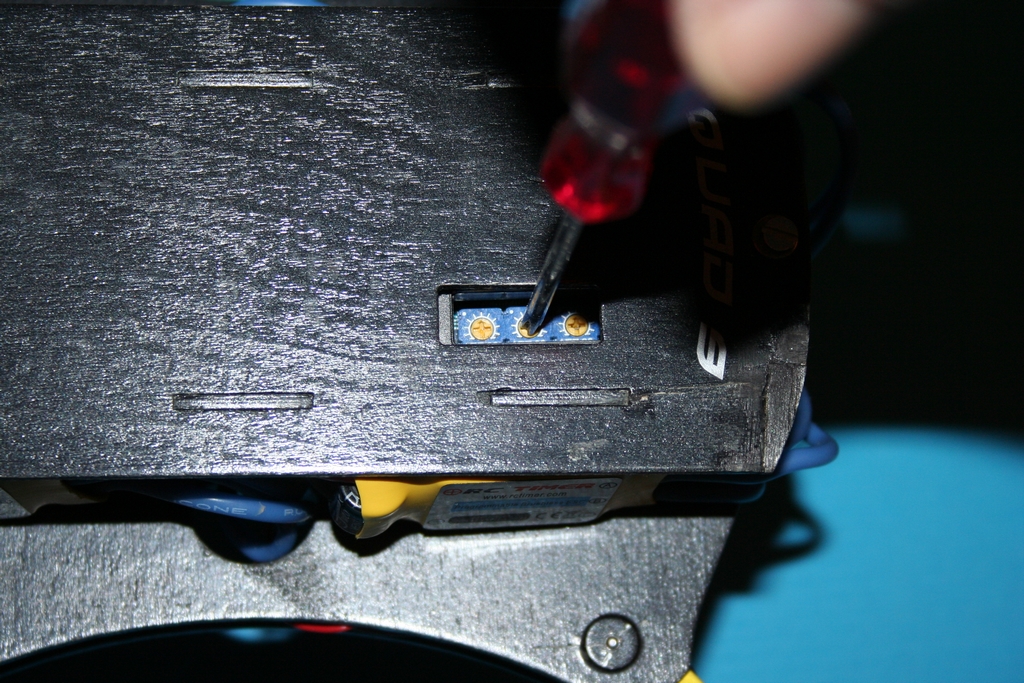
La platine supérieure
comporte une lumière qui permet d'accéder
aux potentiomètres du module de stabilisation.
La batterie doit rester bien en
place. Elle est maintenue par des bandes de velcro.
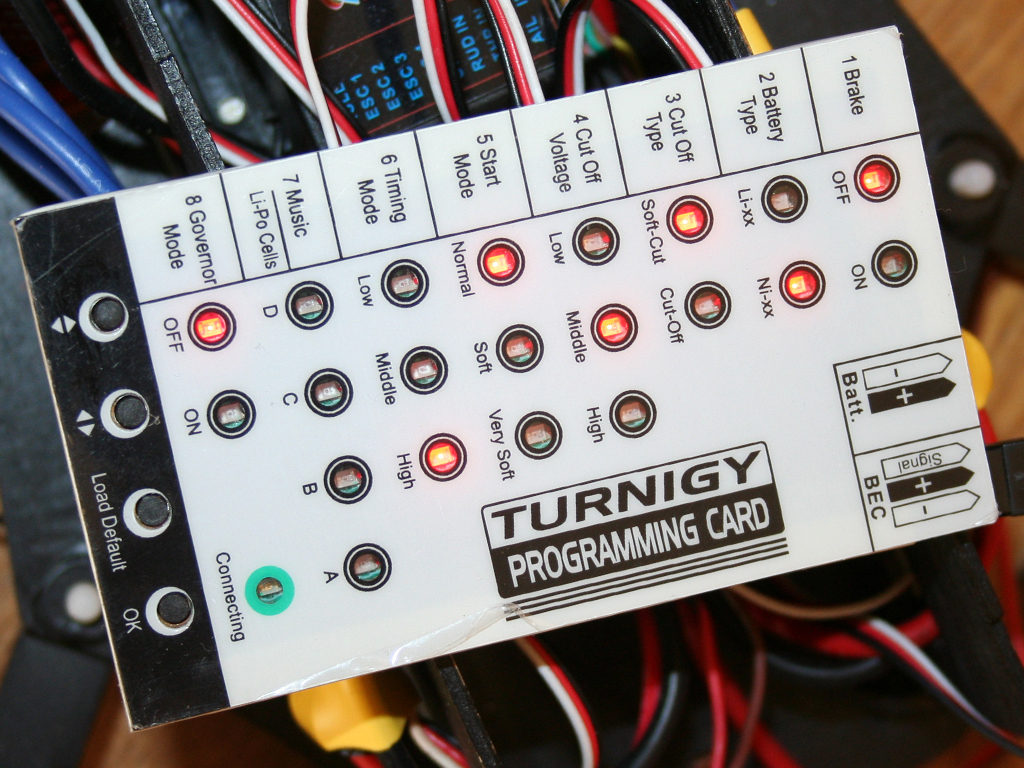
Une carte de programmation est utile pour configurer les 4
contrôleurs de façon identique. Je règle
le type de batterie sur "Ni-xx" malgré l'utilisation
de Lipo. La coupure en fin de décharge est ainsi moins
brutale, le Quad se pose sur baisse de régime si on
oublie d'atterrir plus tôt.
Pour les premiers vols, des patins en contre-plaqué
ont été utilisés mais ils ont vite montré
leurs points faibles : aucune souplesse pour absorber les retours
au sol un peu brutaux. De plus, ils avaient tendance à
s'enfoncer dès que la surface était un peu trop
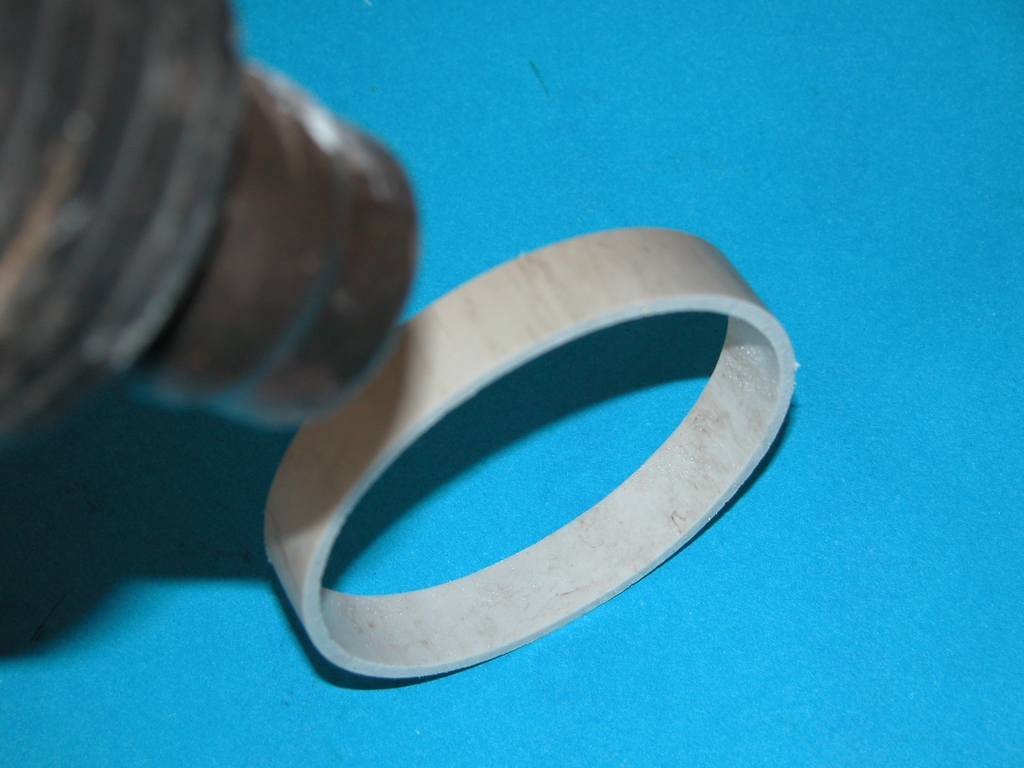
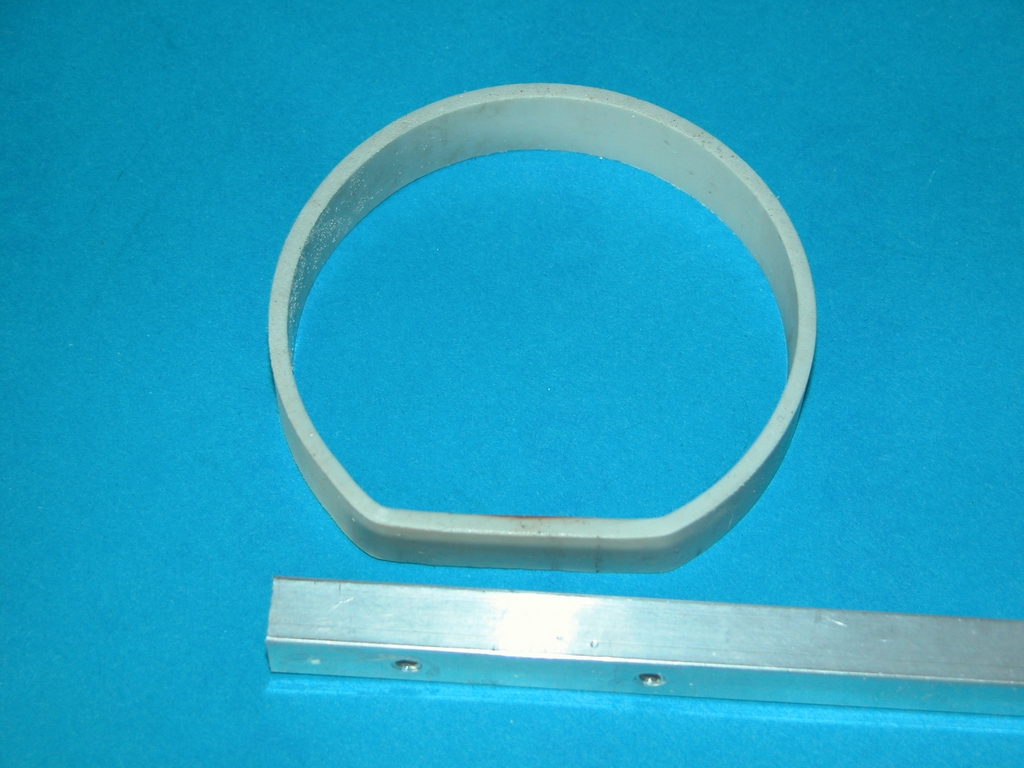
tendre. La solution idéale consiste à utiliser du
tuyau de gouttière en PVC. Coupés de la même
largeur que les bras, ces anneaux encaissent très bien
les chocs et facilitent également la visualisation.
Les patins-amortisseurs
sont réalisés en tuyau PVC. Tronçonnés
à la bonne largeur, ils sont chauffés au décapeur
pour être déformés.
Une cale en
bois permet d'aplatir une partie de la circonférence
en attendant le refroidissement.
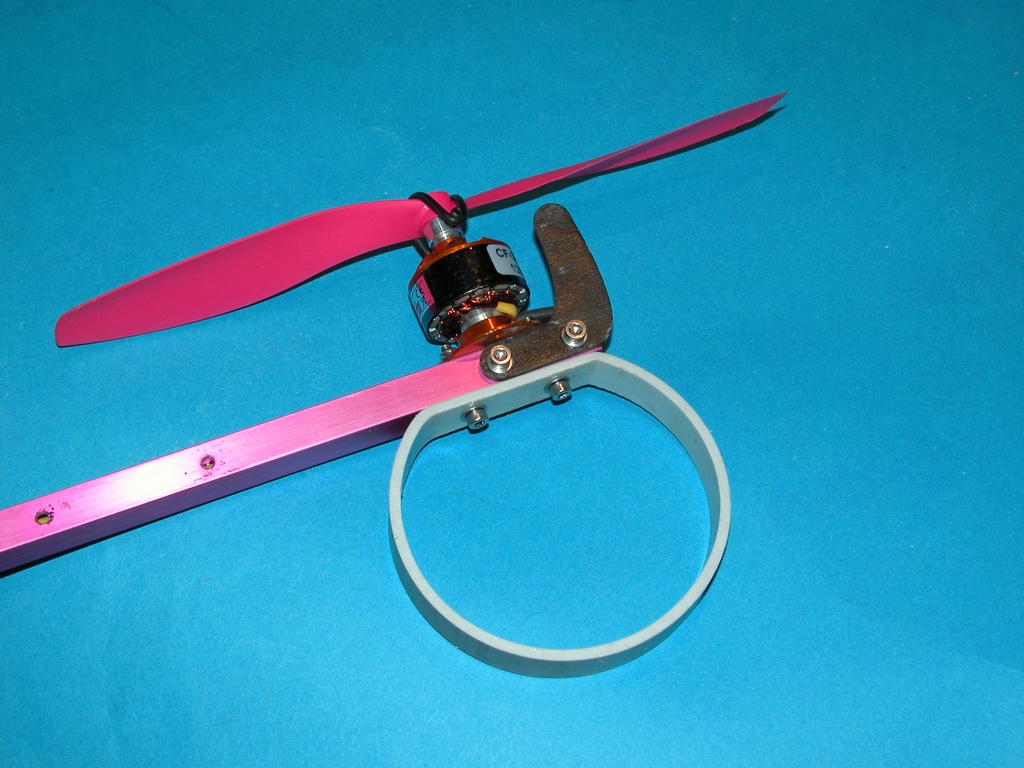
Après peinture, ces patins
sont fixés sur les bras avec les mêmes vis qui
servent à maintenir les moteurs.
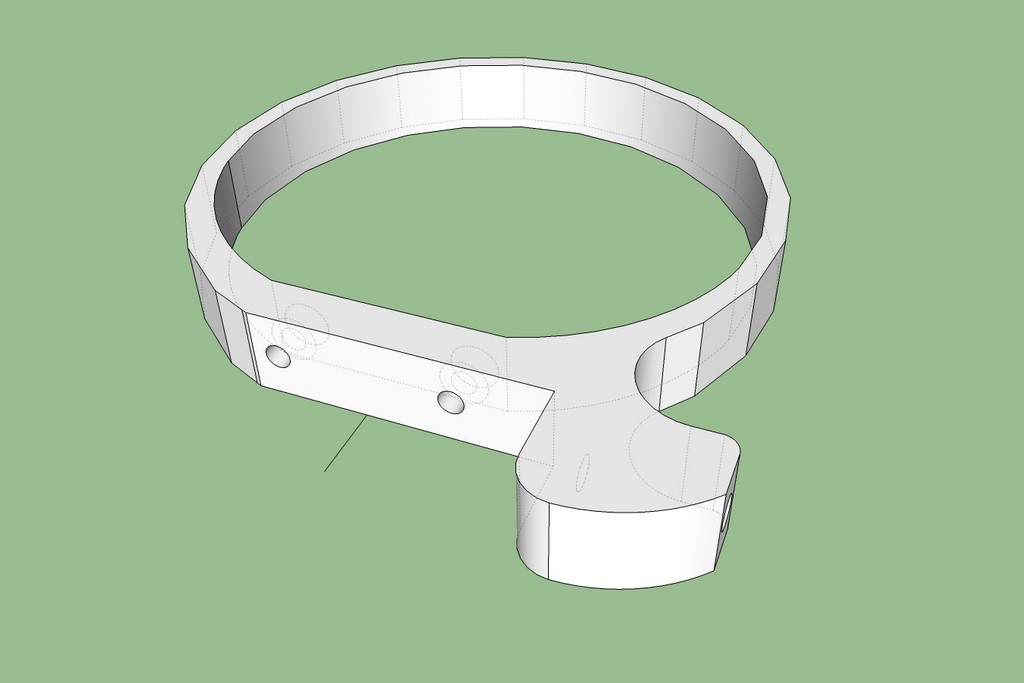
D'autres patins pour
le Quad 9 ont été dessinés avec le programme
3D Sketchup puis réalisés en impression
3D par Sculptéo. Les emplacements des vis de fixation
sont prévues lors de la conception. Le patin est serré
en place sous un des bras du Quad 9 avec les deux vis qui
maintiennent également le moteur. Le patin imprimé
par Sculpteo est plus élégant que le morceau
de gouttière pliée…
Le Quad 9 avec ses nouveaux
patins d’atterrissage hi-tech. La relative souplesse
du matériau amortit les retours au sol. Un renfort
dans l'extrémité du patin permet de glisser
un tube carbone terminé par une balle de ping-pong
qui facilite la visualisation de l’engin.
Une
autre alternative soufflée par Klaudius, c'est le
pied réalisé avec un stabilisateur de pot
de fleur en plastique à mémoire de forme,
incassable... Disponible en grandes surfaces spécialisées
dans le jardinage, pour un coût imbattable de 2,80
€ !
Il est fixé par 4 colliers Rislan qui feront fusible
si nécessaire.
A noter que le quadcopter semble plus stable puisque plus
rien ne perturbe les flux des hélices.
En cas d'atterrissage brutal, les bras du Quad 9 sont aussi
moins sollicités.
Réglages
L'émetteur s'utilise tout simplement
dans la configuration « avion », sans le moindre mixage.
S'assurer que les 4 moteurs sont parfaitement synchronisés
sans mettre les hélices. Ils doivent tous bipper au même
moment et avoir des courses identiques. Il faut aussi s'assurer
qu’ils tournent dans le sens désiré.
Si une voie est libre sur le récepteur, on peut y brancher
un servo qui permettra visuellement de constater l’absence
de parasites aux différents régimes. Le récepteur
est effectivement entouré de contrôleurs qui pourraient
perturber la réception. Aucun problème avec nos
Corona 6 voies.
Si tout est correct, les hélices peuvent être mises
en place. Une excellente astuce transmise par l’ami Ricou
pour préserver les hélices sans prendre le risque
d’en perdre une en vol consiste à monter le prop-saver
au-dessus.
Placer le Quad dans un endroit bien dégagé pour
que les hélices n’avalent pas le moindre objet qui
pourraient s’envoler, le souffle des quatre moteurs est
puissant. Se positionner derrière l’hélico
et augmenter doucement le régime moteur, sans chercher
à décoller. Pousser la commande de lacet, le Quad
doit commencer à tourner sur lui-même, avec l’avant
suivant le même sens que le manche. Si ça n’est
pas le cas, il faut inverser le sens de la voie à l’émission.
Agir ensuite sur l’axe de tangage. Là, il faut mettre
encore un peu plus de puissance. Si l’arrière se
soulève en poussant sur le manche de profondeur, tout va
bien. Sinon inverser la commande à l’émission.
Enfin, régler le roulis. En poussant le manche d’ailerons
dans un sens, le côté opposé de l’hélico
doit se soulever.
Lorsque tout fonctionne correctement, il est recommandé
d’ajouter 50% d’expo en tangage et en roulis. Le lacet
peut conserver sa valeur d’origine.
En plaçant le prop-saver
au-dessus de l'hélice, celle-ci ne risque pas de s'envoler
lors d'une violente remise de gaz par exemple. Le joint torique
remplit parfaitement son rôle d'amortisseur. Si l'hélice
touche un obstacle, elle ne casse pas, pouvant même
restée bloquée alors que le moteur tourne encore.
Dans ce cas, il n'y a que l'élastique à changer.
Vol de nuit
Des
bandes de leds de couleurs ont été ajoutées
aux extrémités des bras pour voler la
nuit.
Grâce aux nombreuses couleurs disponibles, le
Quad 9 est parfaitement identifiable dans le noir.
De
nuit, le vol est féérique. Ici, le modèle
est éclairé par le flash. Le reste du
temps, on le pilote en suivant les leds.
Ces
volutes ont été tracées par un
Quad 9, avec un temps de pause sur l'appareil photo
de 15 secondes et un coup de flash pour éclairer
le pilote...
Pour d'autres infos
sur le vol de nuit et plus particulièrement
sur les leds RGB (Red-Green-Blue) qui permettent en
réalité d'afficher 7 couleurs différentes,
rendez-vous sur la page ci-contre.
Ces quelques leds
ajoutées sont utiles de jour pour bien visualiser
le Quad 9 et rendent sa position parfaitement identifiable
par nuit noire, même en s'éloignant beaucoup
puisqu'elles éclairent vraiment fort.
Pour un supplément
de poids négligeable et une douzaine de soudures,
ce serait dommage de s'en passer.
On
vole ?
Prévoir un terrain dégagé
et si possible une journée sans vent pour le premier vol.
Se placer derrière l’hélico et pousser très
progressivement le manche de gaz. Attention, la puissance est
très importante, inutile de catapulter le modèle
en plein ciel. Les premiers sauts se feront à quelques
centimètres, juste histoire de sentir les réactions.
Par la suite, on mettra un peu plus de puissance, jusqu’à
ce que l’effet de sol et les remous ne viennent plus perturber
la machine, soit à une cinquantaine de centimètres
du sol.
Stationnaire : Le FY-90 montre alors son efficacité, on
entend la variation de régime des moteurs pour conserver
l’assiette. Les corrections se font en donnant de tout petits
ordres. La puissance gère l'altitude, il faut réduire
progressivement pour éviter une descente brutale. Le stationnaire
est un peu plus délicat en pilotage de face ou de côté.
Il faut juste se concentrer pour toujours identifier l’avant
de la machine. C'est une bonne école pour aborder par la
suite un hélicoptère plus classique.
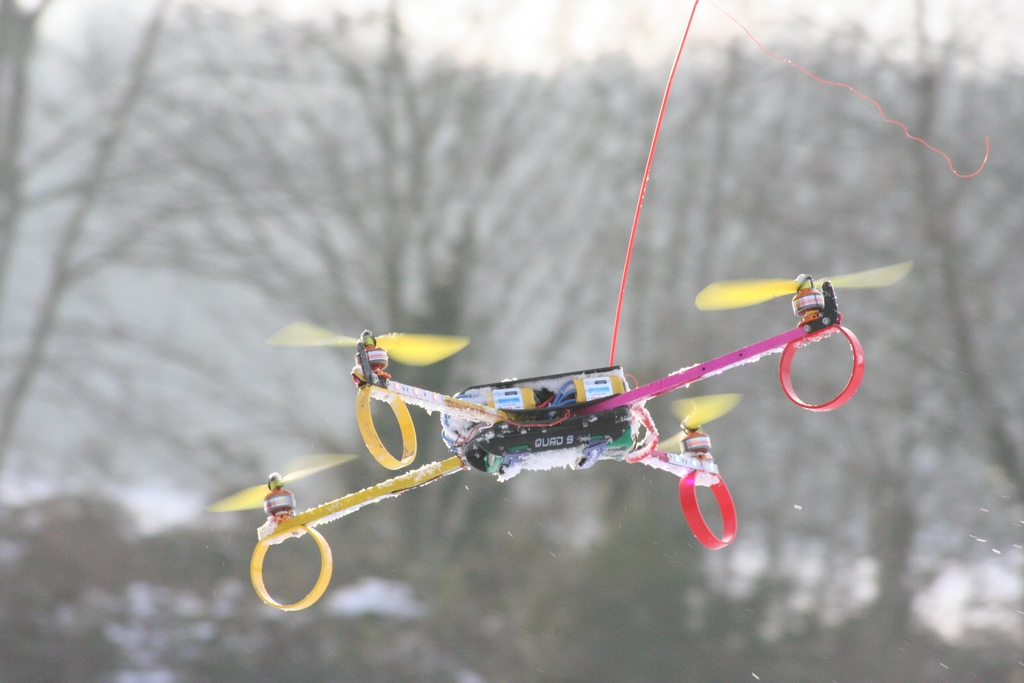
Les patins sont
efficaces, même dans la neige poudreuse.
Départ
en translation. L'avant s'abaisse et le Quad peut voler
assez vite. Le pilotage est facile grâce au stabilisateur
électronique. On prend du plaisir dès les
premières secondes de vol.
Translation : Si tout va bien et que les corrections
aux manches se font convenablement, il est possible de partir
en translation douce. Le pilotage s’apparente alors à
celui d’un planeur : il faut bien utiliser la «dérive»
et piloter 3 axes pour conserver l’avant de l’hélico
vers l’intérieur du virage. Le pilote « avion
» ne sera pas dépaysé dans cette configuration
puisque toutes les commandes fonctionnent de la même façon.
En cas de problème, le plus simple est d'effectuer une
rotation pour remettre l'arrière vers soi.
Vitesse : En insistant sur le manche de profondeur, l'avant s'incline
et le Quad prend de la vitesse. Il faut compenser la perte de
portance en augmentant la puissance. Le bruit lors des passages
avec les 4 hélices à grand régime est prenant.
Je n'ai cependant jamais réussi à mettre plein pot
tellement la puissance est importante.
Atterrissage : Pas de problème particulier pour revenir
au sol. Les perturbations dues à l'air brassé obligent
à remettre un peu de puissance à quelques dizaines
de centimètres du sol. Les patins sont très efficaces
et absorbent la masse du modèle au cas où on réduit
la puissance un peu trop vite.
Le premier septuacoptère
top secret ! Plus sérieusement (si on peut dire), le
Quad 9 est en fait ici en train de porter un tricoptère,
juste pour le fun...
En intérieur : Le bruit des contrôleurs
qui sifflent est impressionnant... Une pièce de 10 m²
suffit pour effectuer du vol stationnaire et quelques rotations
horizontales. Comme indiqué, il faut être à
une certaine hauteur pour éviter les remous. Dans un gymnase,
on est beaucoup plus à l'aise. Mais le vent généré
par les 4 hélices peut alors perturber les autres modèles
indoor. Une idée intéressante serait d'organiser
un parcours réservé à ce genre de machine,
avec des obstacles à franchir.
Avec des 2 650 mAh, on vole entre 8 et 12 minutes, largement de
quoi se faire plaisir. On pourrait facilement emporter le double
d'accus, la puissance disponible le permet.
Evolutions
Les « doudous » et autres peluches
prennent place à bord pour un baptême de l'air pour
le plus grand plaisir des enfants. Le plus gros embarqué
pour le moment est un singe de plus de 500 g, soigneusement ficelé
pour ne pas qu'il finisse en tranches dans les hélices.
Si le modèle devient plus sensible au vent, le comportement
général n'a pas changé. Il faut juste mettre
davantage de puissance pour tenir en l'air, ce qui réduit
l'autonomie.
Pour le plus grand bonheur des enfants,
les « doudous » effectuent une promenade aérienne...
Le Quad 9 vole encore convenablement avec 500 g de plus.
Ici, c'est une
demi-bouteille d'eau (750 g) qui prend son envol, simplement
posée sur le châssis au niveau du centre de
gravité.
Pour rendre le modèle plus vif, le plus
simple est d'agir sur les gyros en tournant les potentiomètres.
Il est également possible de recouper la longueur des bras
de 5 à 10 cm mais ça oblige à reprendre une
partie des soudures. C'est sans doute le choix que je ferai le
jour où je me sentirai capable de tenter les figures de
voltige. Boucles et tonneaux sont réalisables. Je me contente
de grimpées et descentes rapides en tire-bouchon...
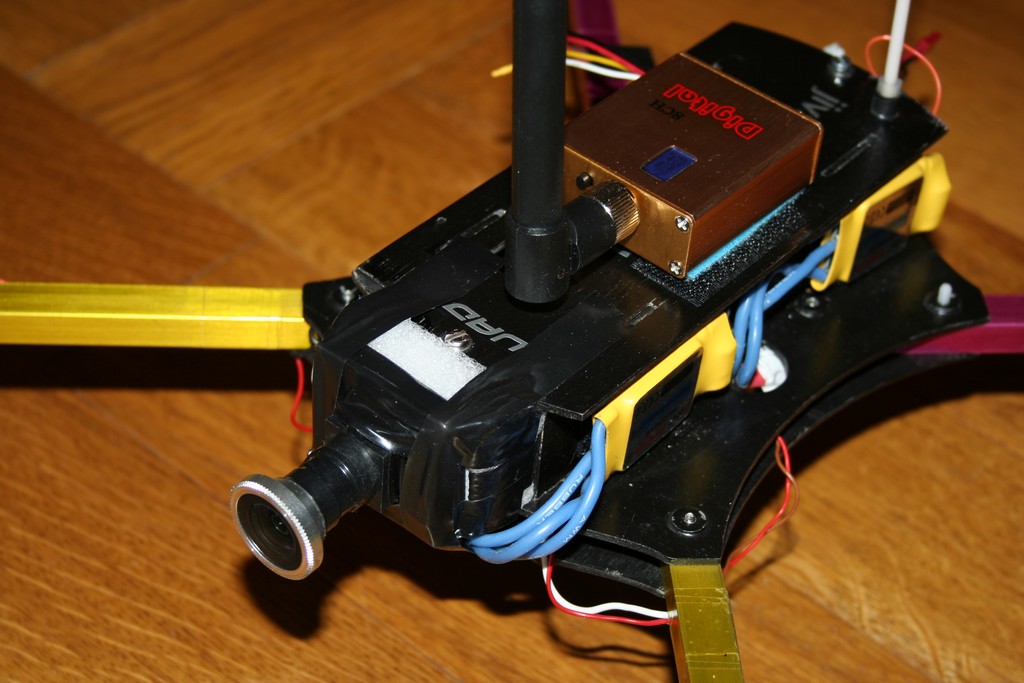
La petite caméra Key Chain a trouvé sa place sur
la platine supérieure et effectue des vidéos correctes.
Du
côté du vol en immersion
Vu la charge utile et la stabilité du FY-90, le vol
en immersion avec le Quad 9 est tout à fait possible.
Voir sur
cette page tous les détails sur le matériel
bon marché qui a été choisi pour effectuer
les premiers pas.
Premiers
essais d'immersion (FPV) sur le Quad 9.
La caméra est fixée pointée vers
l'avant, sur un support en EPP qui absorbe les éventuelles
vibrations. La batterie destinée à l'alimentation
vidéo est glissée à l'arrière.
Le modèle
est suffisamment stable et précis pour se sentir
en sécurité dès les premières
secondes. Le pilotage est même bien plus facile
puisqu'on a l'impression d'être assis à
bord du modèle, ou d'être devant sa télé
en jouant à un jeu vidéo...
750 cl d'eau posés
sur le châssis. Ca vole encore...
Essai de vol en immersion
en forêt.
Cross country dans
un parc.
Quad 9 en immersion
par quatre chemins... FPV
Un autre
châssis a été réalisé
par la suite, intégrant la caméra GoPro
et le matériel pour l'immersion. Il faut simplement
déplacer la batterie principale pour s'assurer
que le centre de gravité est toujours situé
au centre de la croix formé par les bras.
Autre
carte
Il existe un tas d'alternative au FY-90 et à
son successeur le FY-91 car de nombreuses cartes électroniques
ont fait leur apparition un peu partout. Un certain nombre d'entre
elles n'est pas équipée d'accéléromètres
et ne fournit donc pas d'autostabilisation.
Avec la carte Hobby King (Multi-Rotor
Control Board V2.1 - Atmega168PA), le quad reste dans la position
où on l'a laissé. C'est-à-dire qu'en l'inclinant,
il conserve la position jusqu'à ce qu'on le remette à
plat, alors que le FY en position classique (non acrobatique),
il a tendance à vouloir se remettre à l'horizontale.
Objectif
atteint
Ce Quad 9 ne révolutionnera pas le monde
des quadrimoteurs mais il incitera sans doute quelques-uns d'entre
vous à franchir le pas. L'anodisation des bras n'est pas
indispensable, c'est une expérience intéressante
et elle donne tout de suite un côté « pro »
à la machine. Libre à vous de le customiser suivant
vos envies. Pour ma part, je vous laisse, j'ai un Tricoptère
en chantier, mais c'est une autre histoire...
En cas de retour au sol, la casse
est spectaculaire mais bien souvent sans gravité. Des
vis nylon cassées qu'il faut remplacer (en prévoir
une dizaine dans un sachet) et très rarement une hélice.
Il existe un post sur le
forum modelisme.com
consacré au Quad 9, à consulter avant de me
poser des questions qui ont déjà eu leur réponse.
Un grand nombre de modéliste a construit le Quad
9 en y apportant parfois quelques adaptations intéressantes,
en utilisant d'autres matériels que ce qui est présenté
ici. Je suis comme vous, je manque de temps et je n'ai pas
réponse à tout... Prenez donc le temps de
lire ce qui a été écrit.