 |
|
||||||||||||||||||||||||||||||||||||||||||||||||||
 |
Flap-Flap (V2)
Servos, carbone et battements d’ailes
Présentation : Thierry Joubert
( English version here ![]() )
)
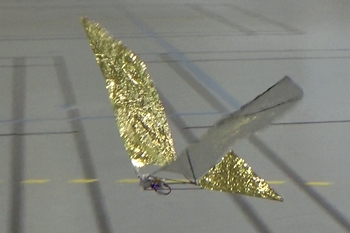
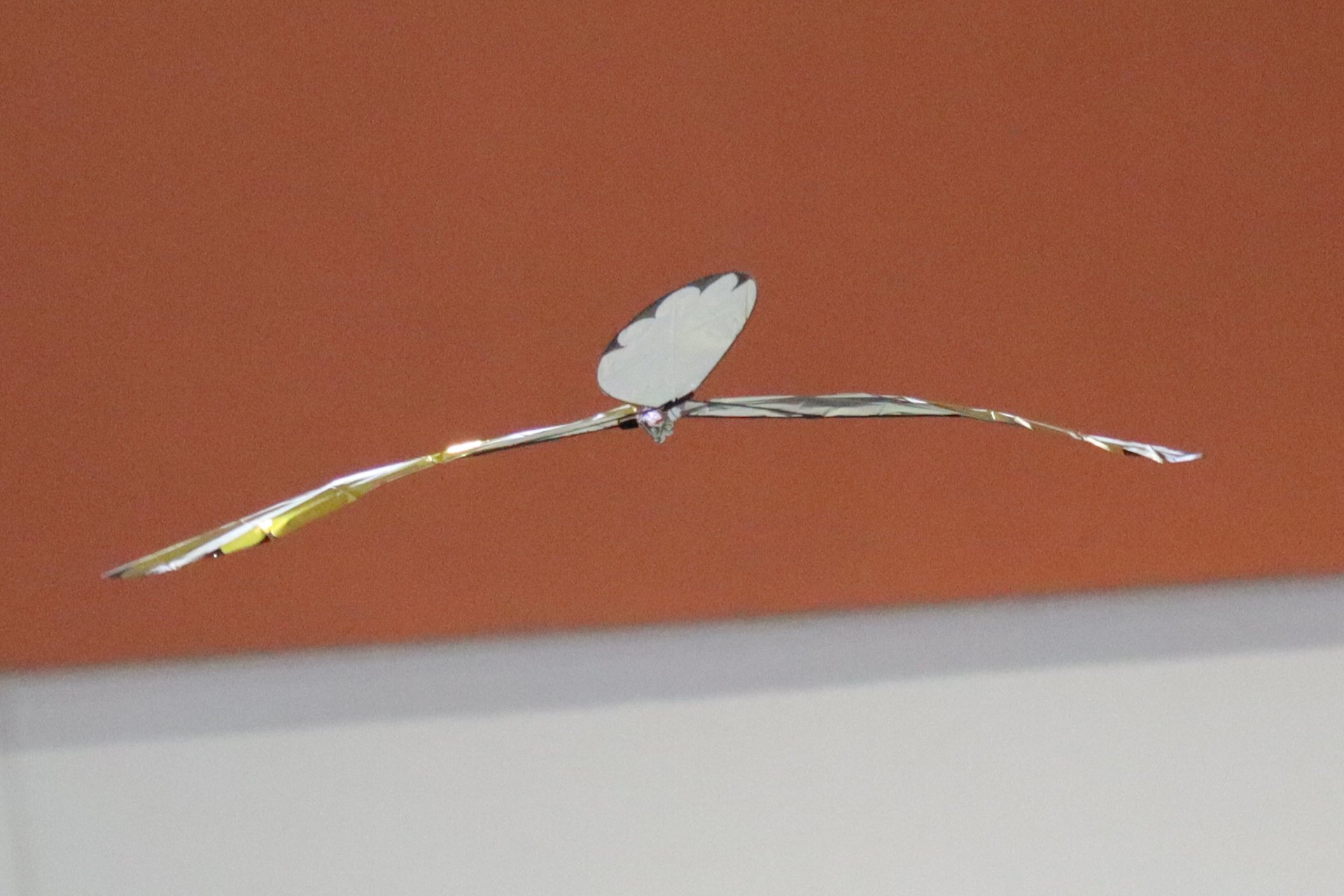
Le Flap-Flap est un ornithoptère ultra-léger propulsé uniquement par ses servos. Il est destiné aux modélistes expérimentés souhaitant explorer le vol battu. Cette notice décrit pas à pas la construction, l’assemblage et le réglage de cet appareil à ailes battantes. L’accent est mis sur la légèreté, la précision géométrique et l’optimisation électronique. Patience, rigueur et persévérance seront les clés pour mener ce projet exigeant jusqu’au vol réussi.
Vidéo illustrant le montage
pas à pas du Flap-Flap. |
| Vidéo de présentation du Flap-Flap - ornithoptère à ailes battantes actionnées par servos. |
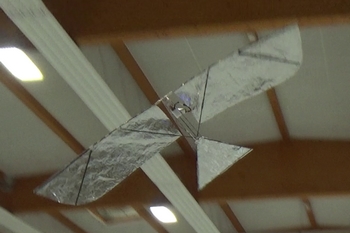
Le Flap-Flap de l'Allemand Stephan
Brehm. |
 |
 |
|
| Le Flap-Flap est un appareil à ailes battantes épuré au maximum. Cellule minimaliste et électronique limitée à 2 servos, un récepteur et un accu. Les ailes peuvent être démontées pour le transport. | ||
 |
 |
|
 |
 |
|
| L'appareil pèse 23 g en ordre de vol. Il est parfait pour voler en salle, ou en extérieur lorsque le vent est totalement absent. | ||
Caractéristiques techniques |
|
| Envergure : 85 cm Longeur : 28,7 cm Surface : 8 dm² Poids : 23 g Charge alaire : 2,9 g/dm² |
Servos : 2x PTK 7350 MG-D Récepteur : FlySky Micro FS2A 4CH Batterie : Li-Po 2S 80 à 110 mAh Radio : OpenTx ou EdgeTx capable d’accepter le Mix LUA |
 |
 |
Le but de cette notice est de vous guider dans la construction d’un petit ornithoptère entrainé et controlé par deux servomoteurs (SFO – Servo Flapping Ornithopter) à l’aide d’un script LUA installé dans votre émetteur.
Cet appareil s'adresse à des modélistes expérimentés ou des experts du super léger :
- Structure en carbone fin
- Pièces de connexion faites à l’imprimante 3D
- Soudure directe des connexions de servos
- Soudure de l’alimentation et assemblage d’accus Li-Po 2S
- Poids cible critique (moins de 20g sans la Li-Po)
- Prévoir une bonne dose de frustration et de ténacité pour réussir...
Avertissement
1 : Avertissement 2 : |
 |
|
| Remerciements
: • Kazuhiko Kakuta - Pour avoir inventé et documenté le SFO • Creative Channel_ • RC-Network.de “Servo getriebener Ornithopter (RC Vogel)” – Ralf Röth pour l’inspiration du script LUA & Frank77 pour le code original • Stephan Brehm – Pour la version V2 allégée... et ses nombreux conseils |
||
Nomenclature |
|
Carbone *peut être remplacé par : |
 |
| Servos 2x micro-servos 5,5 g |
 |
| Récepteur 1x FlySky Micro Rx 1 g |
 |
| Accu 10x Li-Po 3,7V 80 mAh |
 |
| Connecteurs 5x connecteurs JST MX2.0 femelle (éléments 2S) 2x connecteur JST MX2.0 mâle (Récepteur et cordon de charge) |
 |
| Attaches d’ailes Gaine thermorétractable 2,5 mm |
 |
| Entoilage Couverture de survie 250 x 1000 mm |
 |
| Colles Carbone & Connecteurs Carbone & Couverture Servo & Servo |
 |
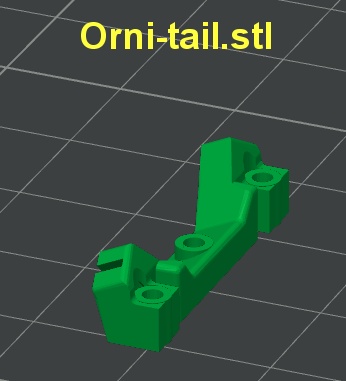
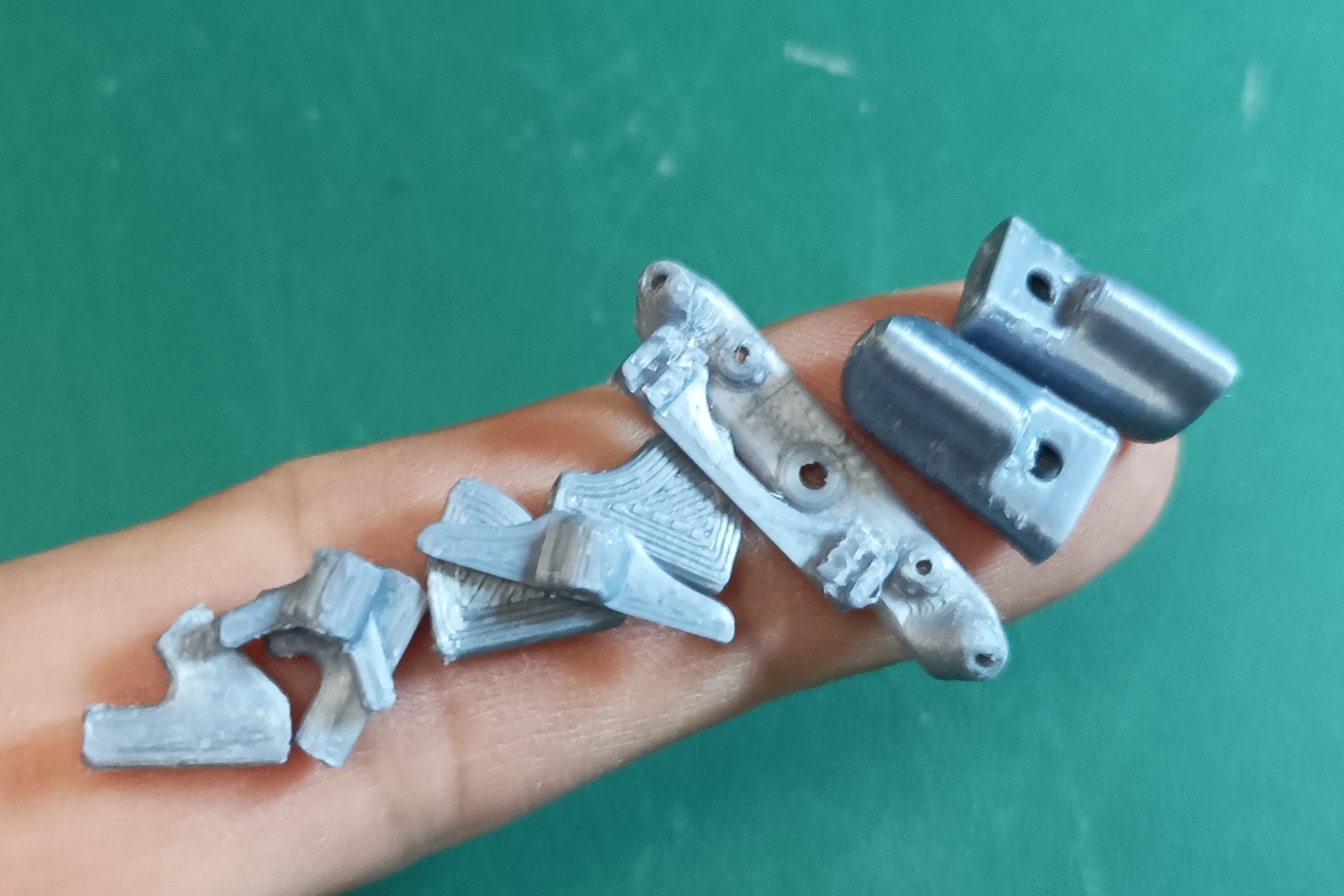
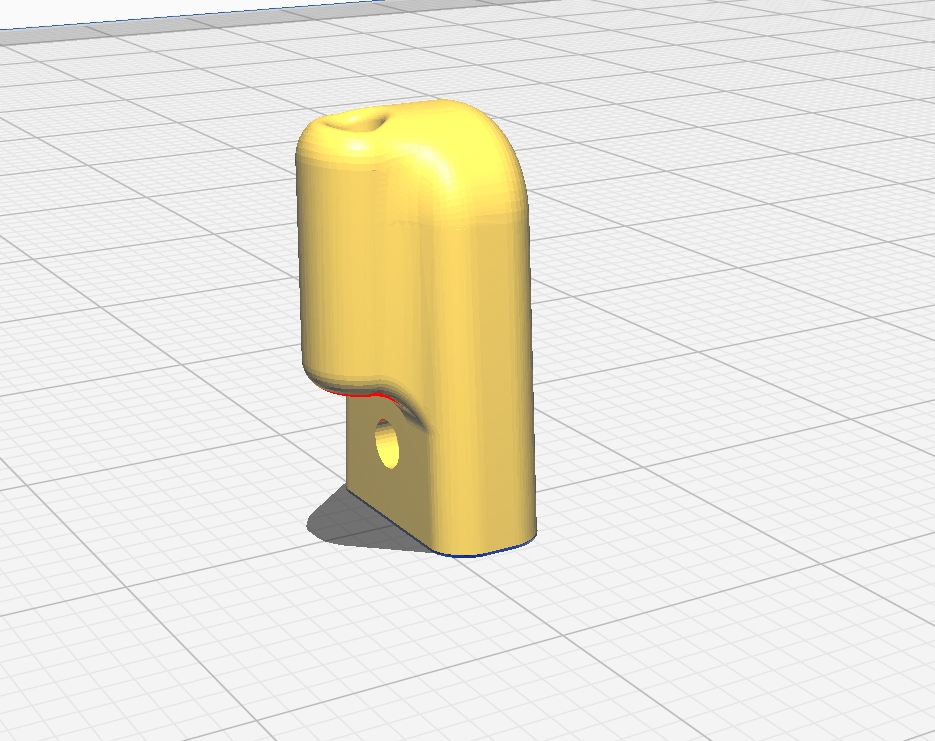
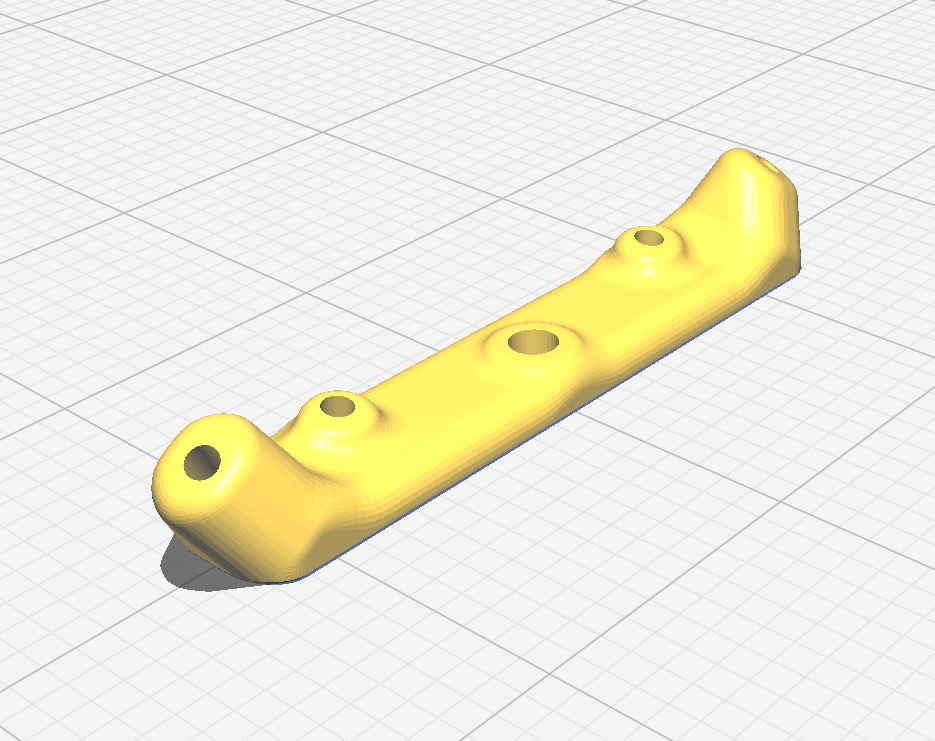
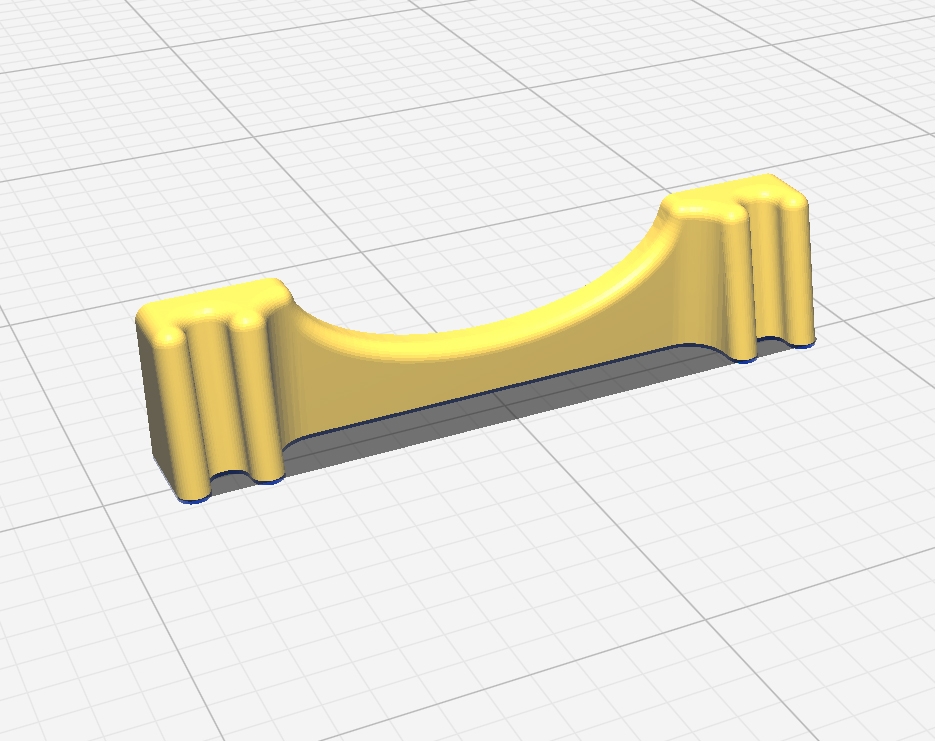
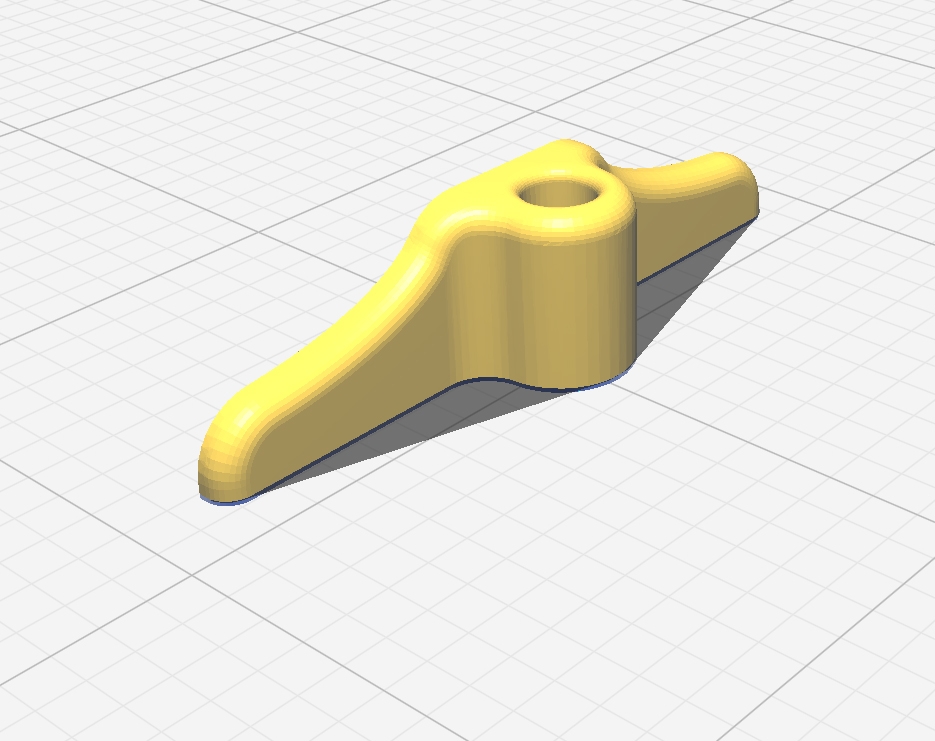
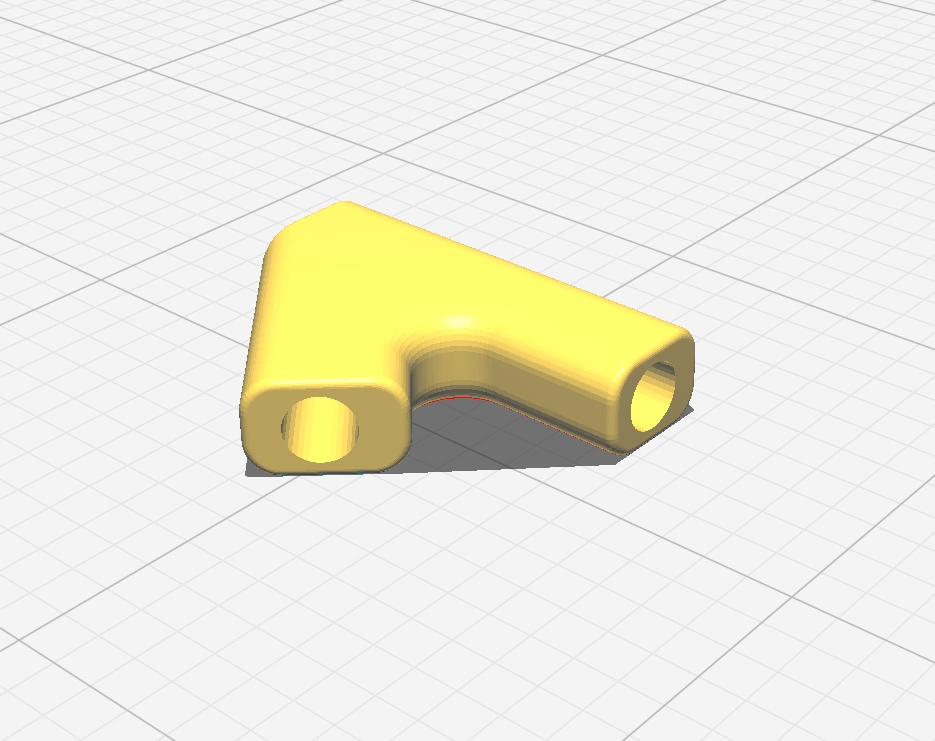
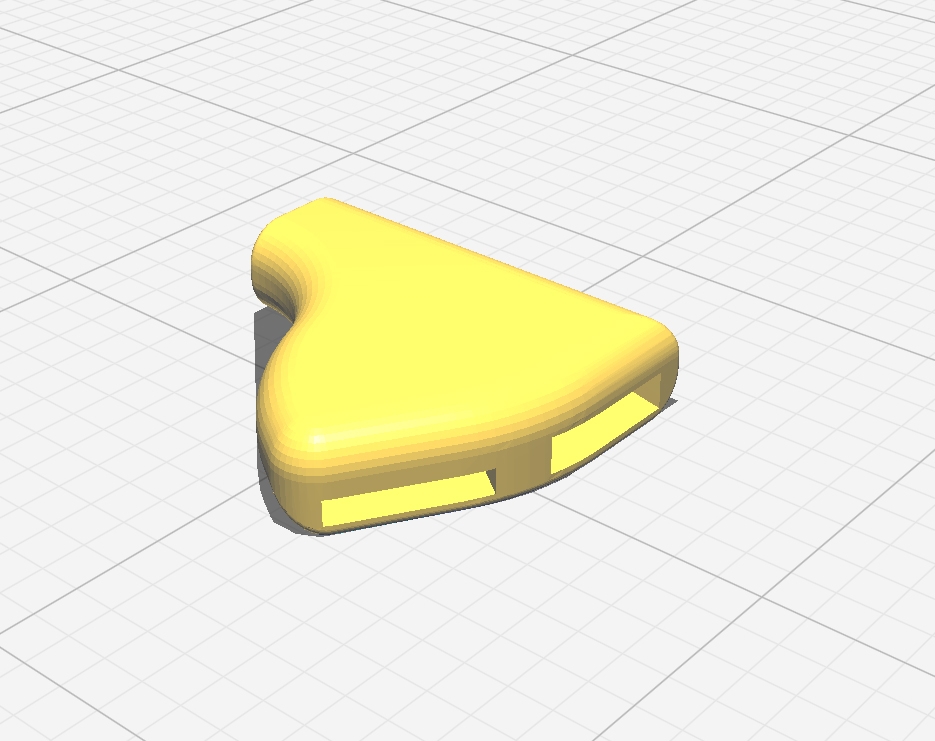
Impression 3D |
Les pièces à imprimer sont dans six fichiers
.STL, certains fichiers peuvent contenir d’autres pièces
que celles ci-dessous, inutile de les imprimer.
![]() Choisir
un matérieau d’impression résistant (le PLA+ convient).
Choisir
un matérieau d’impression résistant (le PLA+ convient).
 |
 |
 |
 |
 |
 |
| Les guignols ci-dessus à gauche sont des pièces renforcées ! Ce ne sont pas celles visibles dans des photos du montage ci-après. Les fichiers STL à imprimer sont téléchargeables ici (393 ko). | ||
|
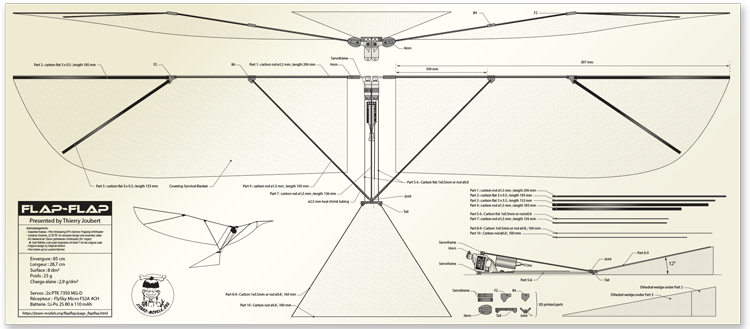
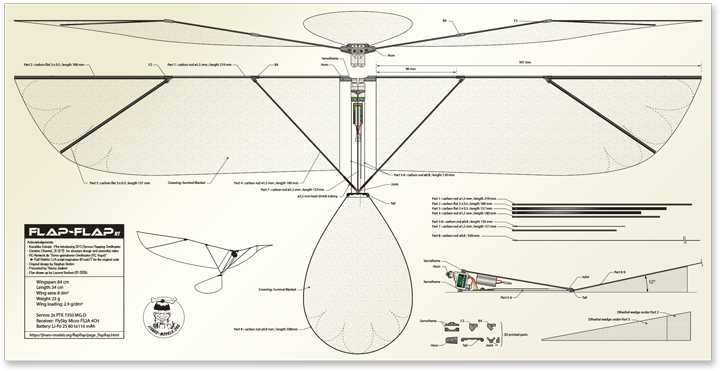
Le plan du Flap-Flap
est téléchargeable au format PDF. |
Préparer le patron de l’aile |
Ci-dessous une photo de l’intrados de l’aile gauche vue de dessous. Il faut noter que l’aile n’est pas plate – la pointe fait un angle dirigé vers l’intrados.
 |
Pour préparer le patron d’aile, imprimer le plan avec un facteur de zoom de 100% sur votre imprimante ou rendez-vous chez un tireur de plans.
Assurez-vous que les dimensions sont respectées :
- Bord d’attaque (sans la pièce “horn”) = 397 mm
- Emplanture = 115 mm
- Largeur au connecteur F2 = 120 mm
 |
Si les dimensions du patron ne sont pas correctes, ajuster le facteur de zoom de votre imprimante.
Une fois à la bonne échelle, découper le contour de l’aile comme guide pour les étapes suivantes.
Parlons grammes |
Plus votre Flap-Flap sera léger et mieux il volera. De plus le poids final aura un impact sur l’amplitude nécessaire dans le mouvement des ailes et par voie de conséquence sur la durée de vie des moteurs des servos.
Un seuil de poids est imposé par la nomenclature :
|
|
|
|
|
|
|
|
|
|
|
|
Par conséquent l’objectif de poids pour la structure en carbone et des pièces 3D est entre 4 et 5 grammes.
|
 |
Assemblage des ailes |
 |
L’aile gauche vue de dessous |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Chaque aile a trois connecteurs :
|
 |
Coller d’abord la tige #1 (jonc 1,5 mm) au connecteur F2 Attention pour la suite, il y a un F2 droit et un F2 gauche ! |
 |
Coller maintenant la tige #2 au connecteur F2, elle doit faire un angle vertical de 11° mais pas d’angle horizontal (les tiges #1 et #2 doivent faire une parfaite ligne droite en vue de dessus). Mettre une cale de 35 mm à la pointe de #2.
 |
 |
Coller la tige #3 au connecteur F2. Elle doit aussi faire un angle vertical de 11°. Placer pour cela une cale de 30 mm à la pointe de #3. Pour l’angle horizontal de la tige #2, suivre le dessin sur le patron de l’aile.
 |
B4 reste libre sur la tige #1 |
Coller la tige #4 au connecteur B4, mais ne pas encore coller B4 à la tige #1, glissez-le simplement comme montré ci-dessus.
Coller le Horn à la tige #1 en faisant attention qu’il soit parfaitement vertical pour bien se monter sur le servo. > Il est possible de ne réaliser cette opération qu’au montage final de l’aile. |
 |
Ces Horn peuvent être fixées aux palonniers en nylon des servos à l’aide de vis de manière à rendre les ailes détachables pour le transport. |
 |
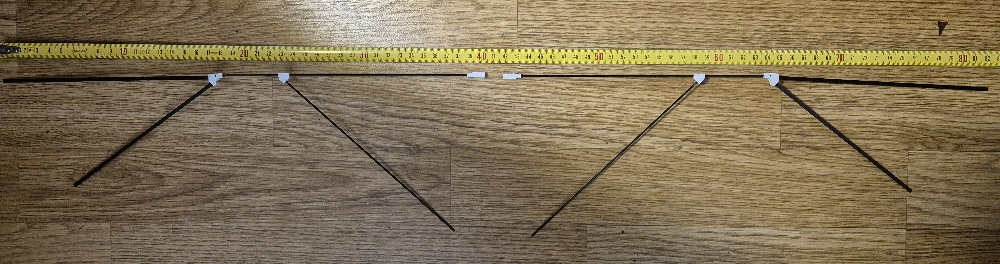 |
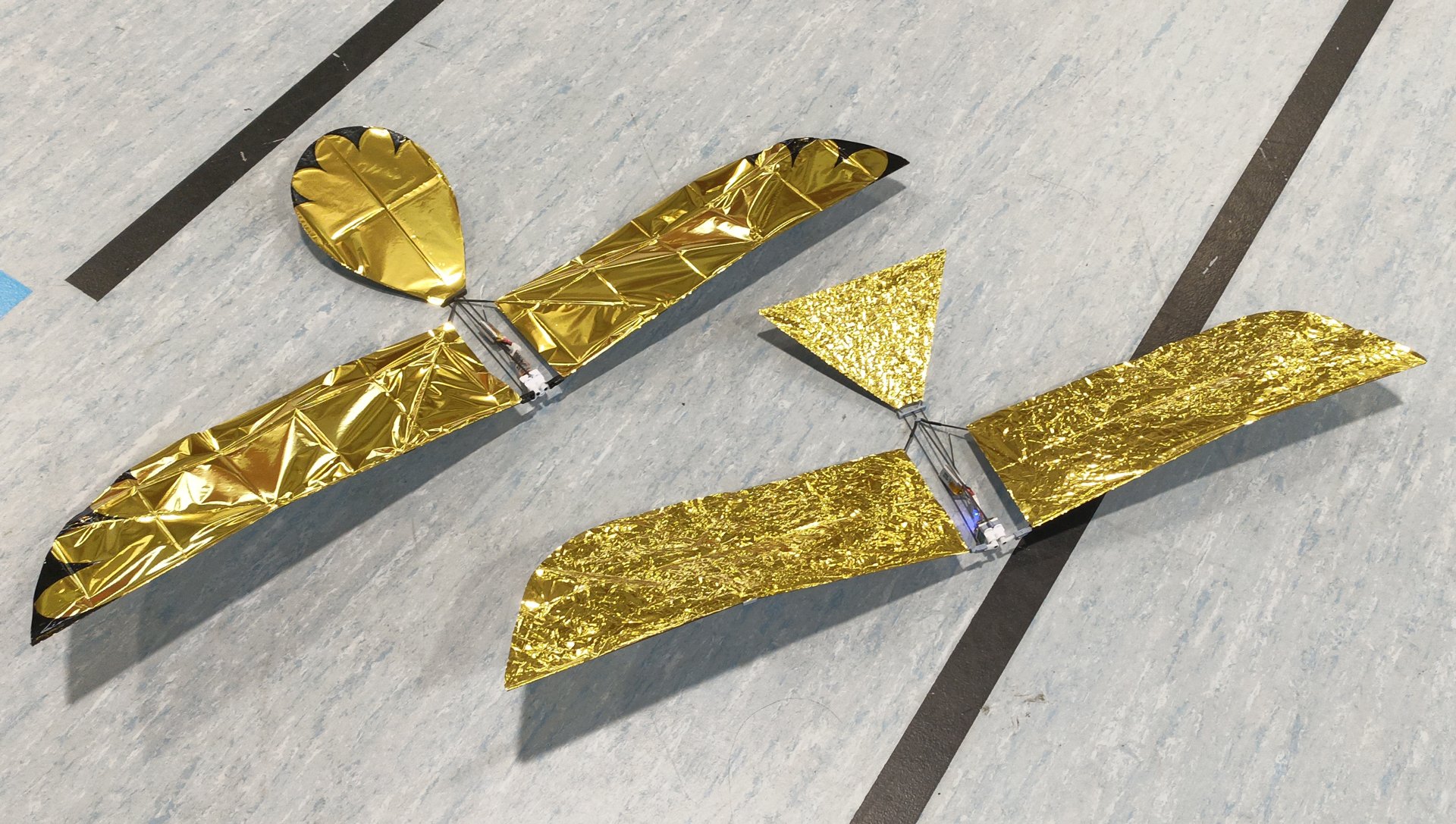
Après assemblage,
les deux ailes ressemblent à ceci. |
A cette étape les connecteurs B2 sont glissés sur les tiges #1 mais pas collés à celle-ci car leur position dépendra de la géométrie finale de la partie centrale.
Chaque aile est rattachée à la partie centrale par deux points :
Ne collez pas encore le connecteur B2 à la Tige #1, cela ne sera fait qu’après le finalisation de la partie centrale. |
 |
Assemblage de la partie centrale |
 |
Le "fuselage"
et l'empennage |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
| *peut être remplacé par du jonc 0,7 mm ou 0,8 mm | ||
La structure de la partie centrale avec la queue est faite de 6 tiges en carbone, 4 connecteurs et de 2 servos PTK 7350 MG-D.
Les deux servos font partie intégrante de la structure, avec leurs connecteurs ils constituent l’avant et seront collés aux tiges #5, #6 et #7. |
 |
Deux connecteurs sont situés à l’arrière :
|
 |
Les servos et le récepteur |
Les fils des servos sont soudés au récepteur avant de procéder à la suite de l’assemblage.
Commencer par enlever la base des corps des servos pour que les moteurs soient à l’air libre et puissent ainsi mieux refroidir. Ajouter une petite goutte de colle chaude sur les moteurs pour éviter qu’ils ne s’échappent de leur logement.
Retirer un des autocollants et assembler les deux servos côte-à-côte en utilsant du scotch double face fin (vérifier que l’alignement est parfait puis presser bien fort).
Coller maintenant les deux connecteurs :
Toujours bien vérifier que l’alignement et la symétrie sont parfaits lors de ces collages. |
 |
Couper les fils des servos à environ 25 mm du circuit électronique et les souder directement sur le récepteur. Le servo de droite va sur le canal-1 et le servo de gauche va sur le canal-2. La dernière opération de soudure est l’alimentation faite à partir d’un connecteur MX2.0 mâle. Le courant nécessaire pour les servos fait des pics de 1,25A ce qui est trop pour le circuit imprimé du récepteur, c’est pourquoi il faut souder des tiges de cuivre qui font le pont avec le Plus et le Moins des fils de servos (comme on peut voir sur l’image). |
 |
Le carbone de la structure centrale |
Quand la soudure est
terminée, insérer les tiges de carbone dans les emplacements
prévus sur les connecteurs. Le connecteur Joint n’est PAS collé à la tige #7. Vous pouvez maintenant coller toutes les tiges en vérifiant bien à chaque fois la géométrie globale. On voit sur l’image l’allure générale de la structure centrale quand elle est terminée. |
 |
Assembler la queue |
La dernière opération sur la structure centrale consiste à assembler la queue, deux points critiques ici :
- Respecter l’angle d’attaque de la queue avec le plan des ailes
- S’assurer que la queue est bien horizontale avec les tiges
#5 et #6


La queue doit faire un angle de 12° avec les tiges #5 et #6 (ou 8,5° avec les tiges #5 & #6). Une solution pratique consiste à maintenir la partie centrale bien à plat puis à placer des blocs de 34 mm aux deux pointes à l’arrière de la queue.
 |
| > Le triangle fait par les tiges #8, #9 et #10 peut être réalisé avec une seule tige de carbone pliée à chaud. |
La finition des ailes |
Quand la partie centrale est prête, connecter chacune des ailes, le Horn sur les servos et la tige #4 sur le connecteur Joint avec une gaine thermo (non rétrécie pour l’instant).
Mettre le patron d’aile en place pour vérifier que la géométrie est respectée. Une fois que les deux ailes forment une ligne bien droite et perpendiculaire à la partie centrale, l’emplacement longitudinal de chaque connecteur B2 est correct. Ne pas coller tout de suite les connecteurs B2 aux tiges #1 mais les maintenir en place avec un bout de ruban adhésif.
 |
Maintenant démonter les ailes en s’assurant que les connectsurs B2 restent bien en place longitudinalement.
Poser chaque aile sur son extrados sur une surface plane et placer les pointes des tiges #2 et #3 à la bonne distance de la surface :
- Pointe de la tige #2 = 35mm
- Pointe de la tige #3 = 30mm
On peut utiliser des cales pour bien maintenir les tiges #2 et #3 pendant les manipulations.
Cette opération est critique car il faut s’assurer que les deux ailes ont bien la même géométrie. L’expérience a montré que si les angles des tiges #2 et #3 sont différents entre les deux ailes, le Flap-Flap va avoir une tendance naturelle à virer d’un côté.
> Maintenant on peut coller les connecteurs B2 aux tiges #1 de l’aile droite et de l’aile gauche.
 |
Armature minimaliste
mais qui demande du soin. |
En utilisant le patron de l’aile, découper deux formes dans la couverture de survie, une droire et une gauche. Ensuite bien froisser la matière trois fois dans la main et la mettre en place sur la surface de travail.
 |
Découpe de la
couverture de survie servant d'entoilage. |
Vaporiser un voile de colle 3M Super-77 sur l’extrados de la structure puis appliquer la structure encollée sur la couverture (On dispose de 30 secondes).
 |
Faire de même avec la queue, puis monter toutes les pièces ensemble.
Sans Li-Po le Flap-Flap doit peser moins de 20 grammes, sinon ses qualités de vol seront moins bonnes, le plus léger est le meilleur.
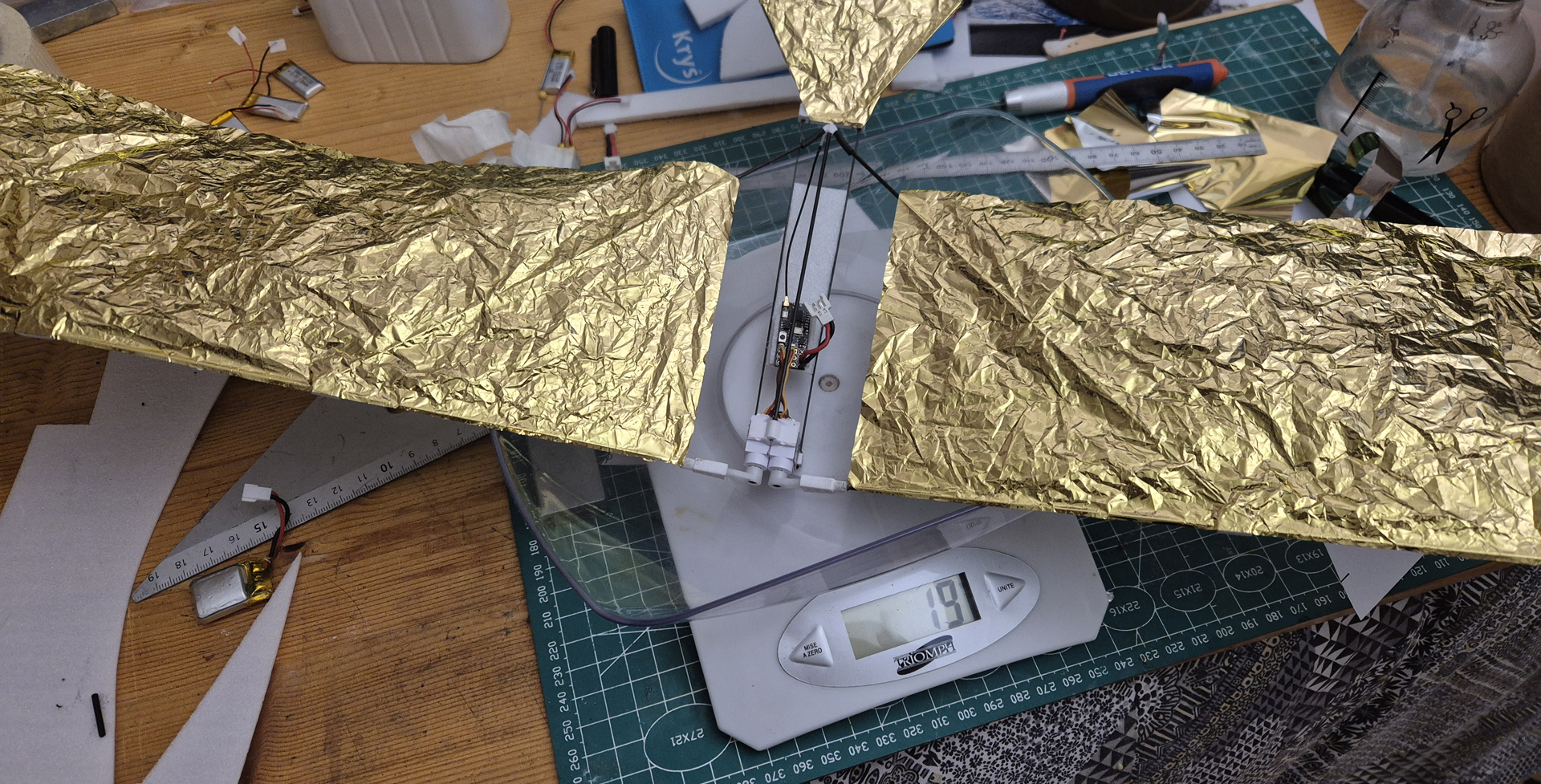 |
19 g sans la batterie,
c'est l'objectif à atteindre. On peut encore faire un peu
mieux. |
Il est maintenant temps de chauffer la gaine thermo à la base des ailes, pas trop toutefois si on veut que les ailes soient démontables pour le transport.
Assembler une Li-Po 2S |
Si vous ne trouvez pas de Li-Po 2S à 110 mAh dans le commerce, vous pouvez assembler les vôtres à partir de deux Li-Po 1S entre 80 et 110 mAh, plus faciles à trouver car très utilisées dans les équipements électroniques (écouteurs…)
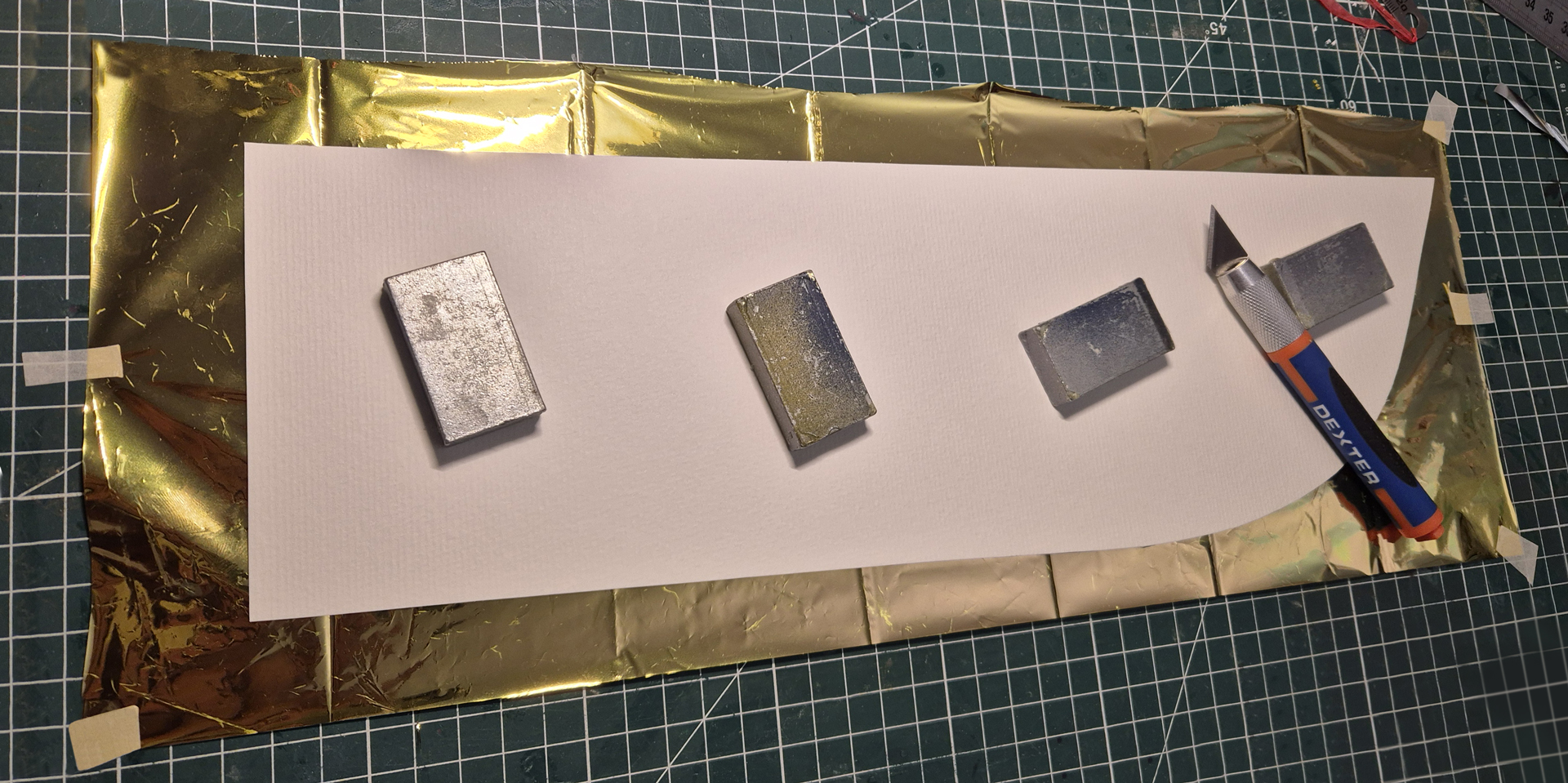
Avertissement |
Retirer le ruban adhésif jaune qui protège la tête de l’élément Li-Po 3,7V. Retirer ensuite le petit circuit électronique
de protection, cela afin de profiter du plein débit de votre
Li-Po (Flap-Flap fait des pics à 1,3 A). Cette opération est délicate car
ce circuit est soudé par points aux connecteurs de la Li-Po,
évitez les outils métalliques à cause des courts
circuits. Dans tous les cas il faut laisser suffisament de longueur de connecteur pour pouvoir faire les soudures à venir. |
 |
Pour souder les connecteurs sans chauffer la Li-Po, on peut utiliser un bloc de glacière qui va refroidir la Li-Po pendant les soudures. Une fois que les quatre connecteurs sont étamés, repérer les pôles négatifs de chaque élément 3,7 V avec un marqueur, puis placer les deux éléments face à face sur les faces qui rendent les connecteurs le plus éloignés possible. |
 |
Souder le fil noir du connecteur MX2.0 femelle à un des pôles négatifs, puis souder le fil rouge au connecteur opposé sur l’autre élément (il DOIT être positif), puis souder ensemble les deux connecteurs restants.
On obtient une Li-Po 2S super légère, mais sans connecteur d’équilibrage. Certains chargeurs vont la prendre en charge, sinon chargez chaque élément en 1S en passant par le pont (bien vérifier la polarité). |
 |
Préparer l'émetteur |
Copier le script LUA sur l’émetteur. Fichier
téléchargeable dans l'encadré ci-dessous.
Toutes les copies d’écrans dans cette section viennent d’une
radio EdgeTX Boxer. Les instructions sont toutefois applicables à
d’autres radios EdgeTX ou OpenTX, avec simplement des graphismes
différents. (Les Mix LUA devraient aussi marcher sur les radios
Jeti mais cela n’a pas encore été testé).
Connecter la radio sur l’ordinateur avec un câble USB, puis choisir sur la radio l’option USB Storage (SD). Si c’est un PC Windows, un nouveau volume (i.e. D:) va appareître dans l’explorateur de fichiers. Copier le fichier SFO3.lua dans le répertoire D:/SCRIPTS/MIXES, ensuite déconnecter le câble USB.
Ouvrir le menu principal
de la radio (pas le menu MODELES). |
 |
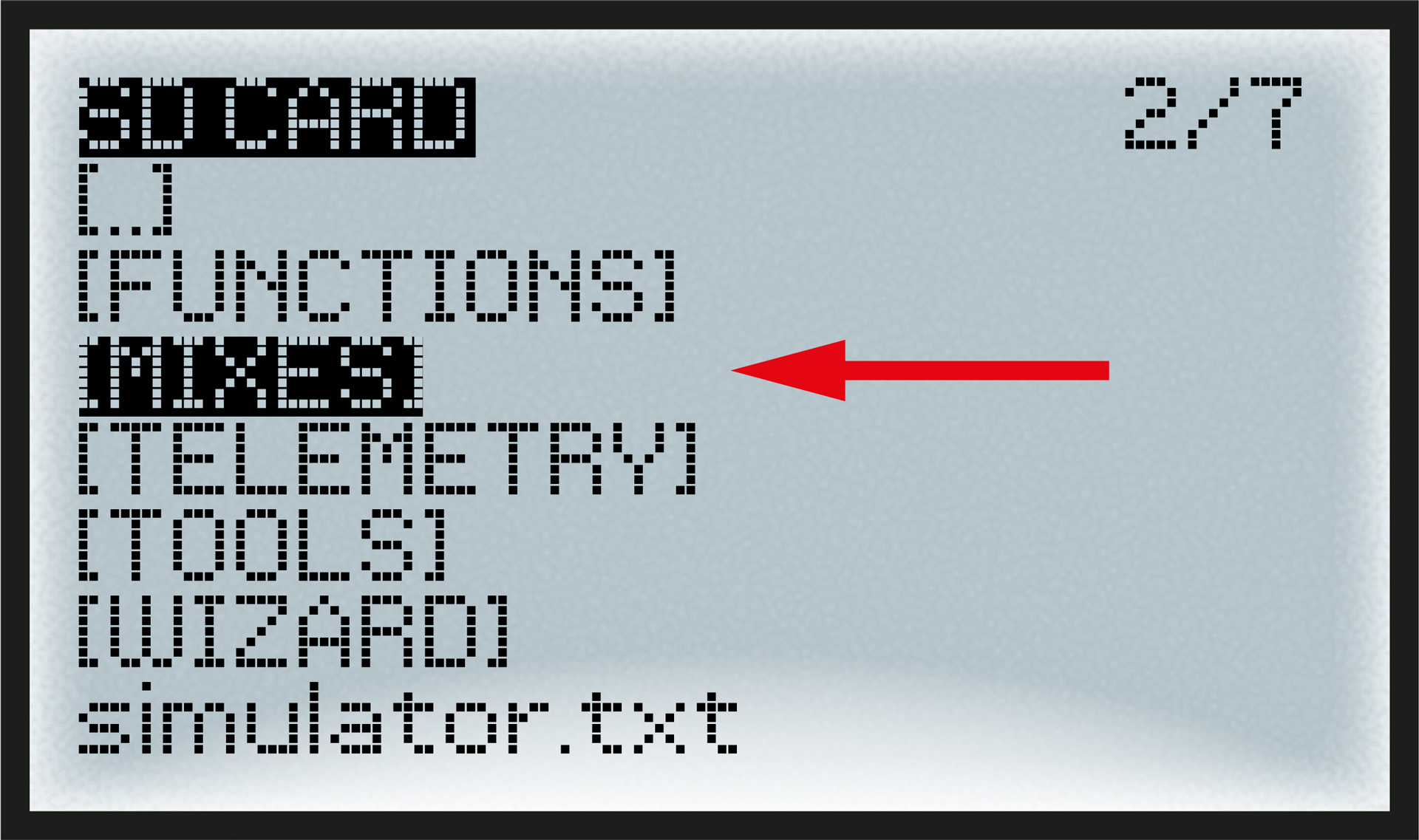
Il y a maintenant un sous menu MIXES : l’ouvrir. |
 |
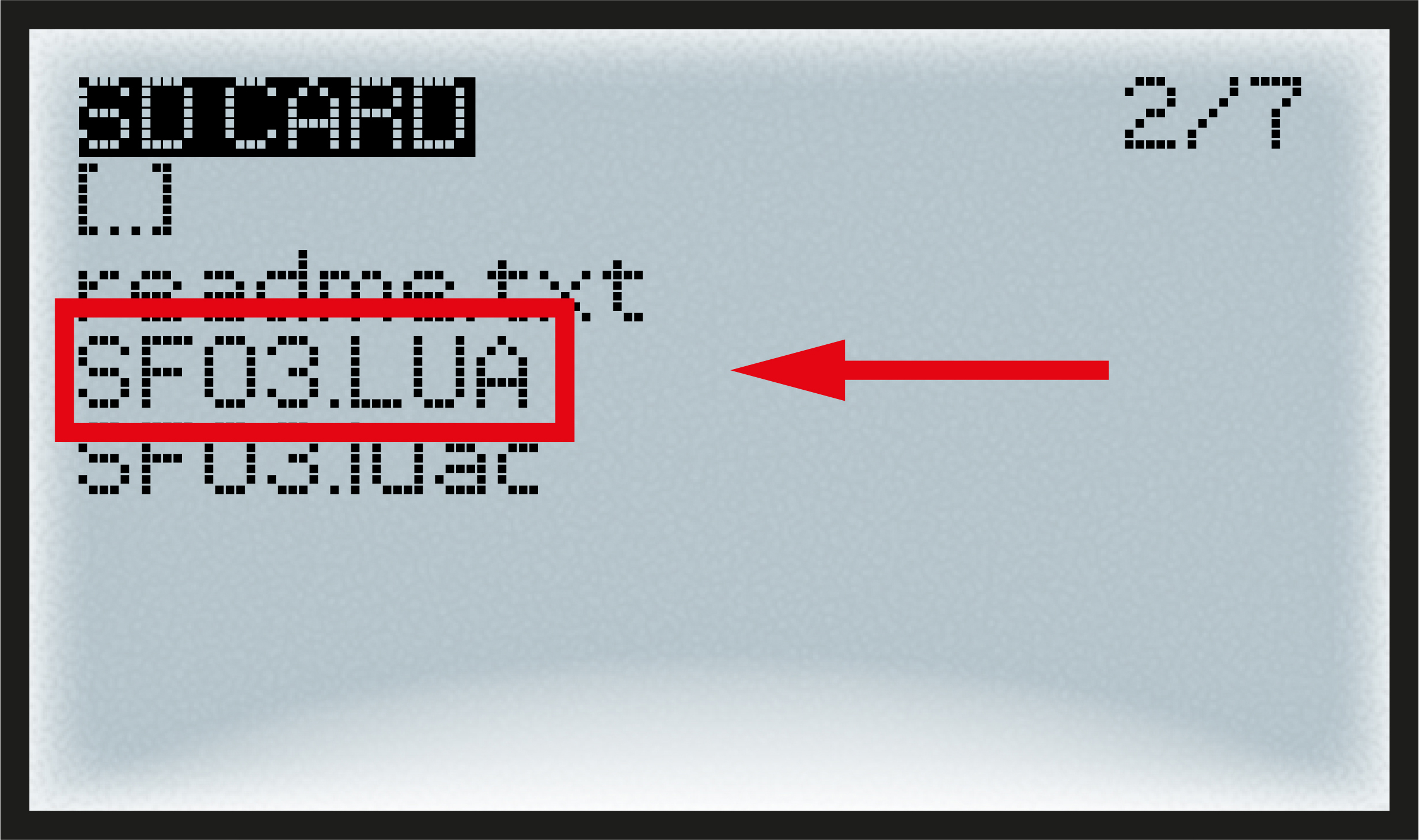
On doit voir le fichier SFO3.lua (le fichier SFO3.luac apparaîtra après la première activation). |
 |
La suite se déroule dans le menu MODELES.
Paramétrer le modèle |
Dans le menu MODELES (et pas le menu principal) de votre
radio, Il faut commencer par créer un nouveau modèle “Flap-Flap”
à partir d’un modèle vide.
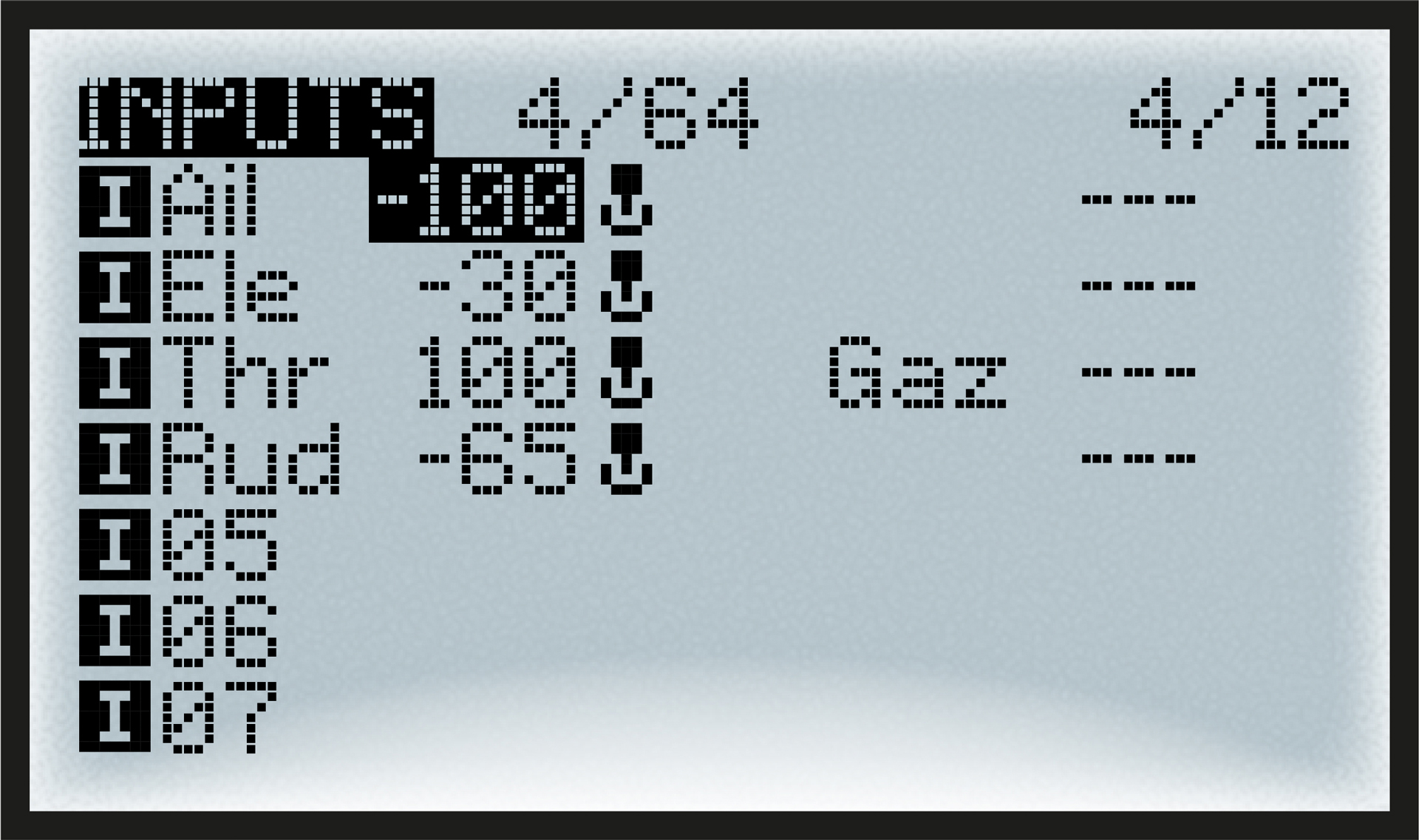
On va ensuite activer le script LUA MIX puis on va assigner les manches
et boutons à ses entrées (Inputs).
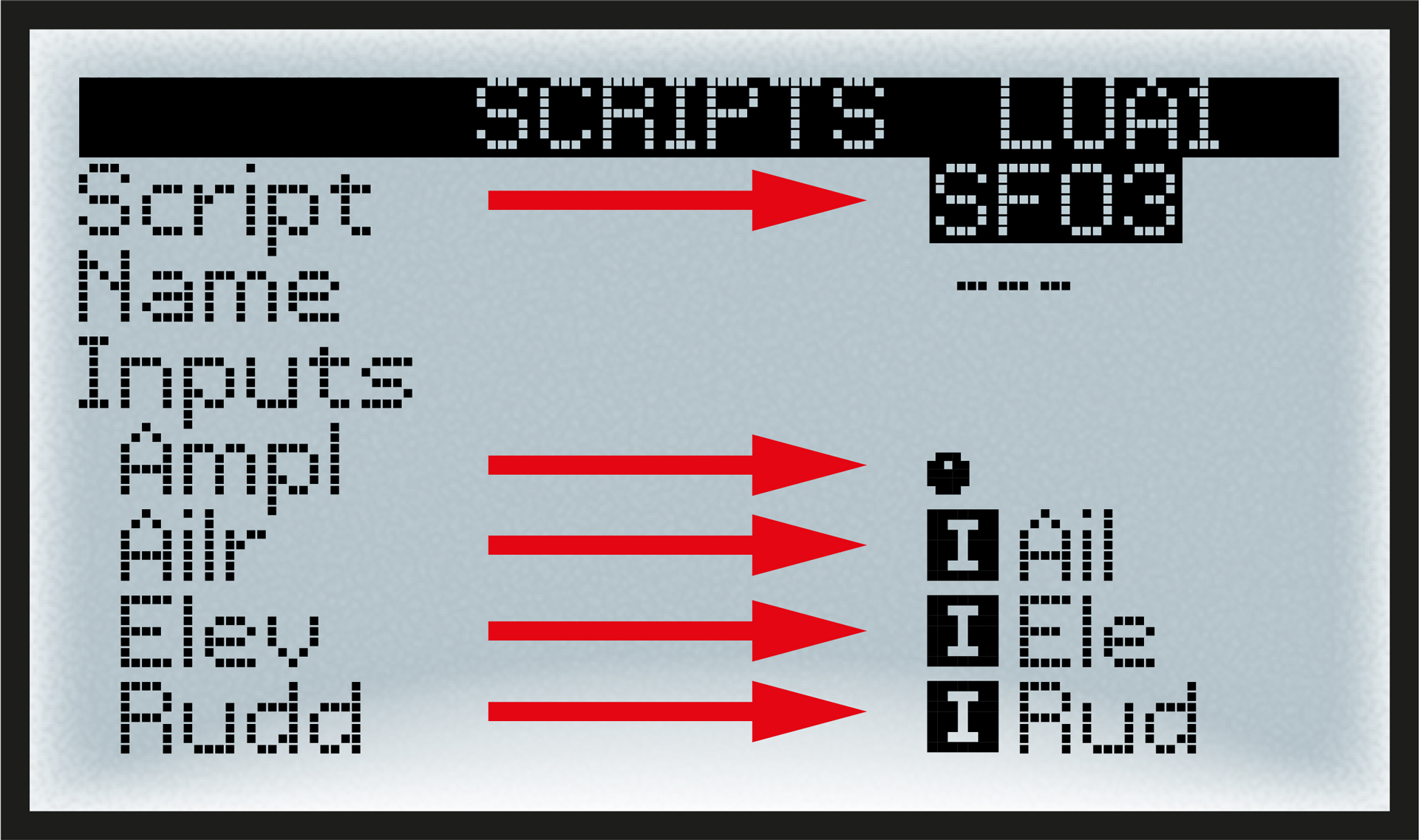
Ouvrir le menu MODELES
et sélectionner le modèle “Flap-Flap”. Dans la section Script sélectionner SFO3 (il n’y en a qu’un car il y a un seul fichier .LUA). |
 |
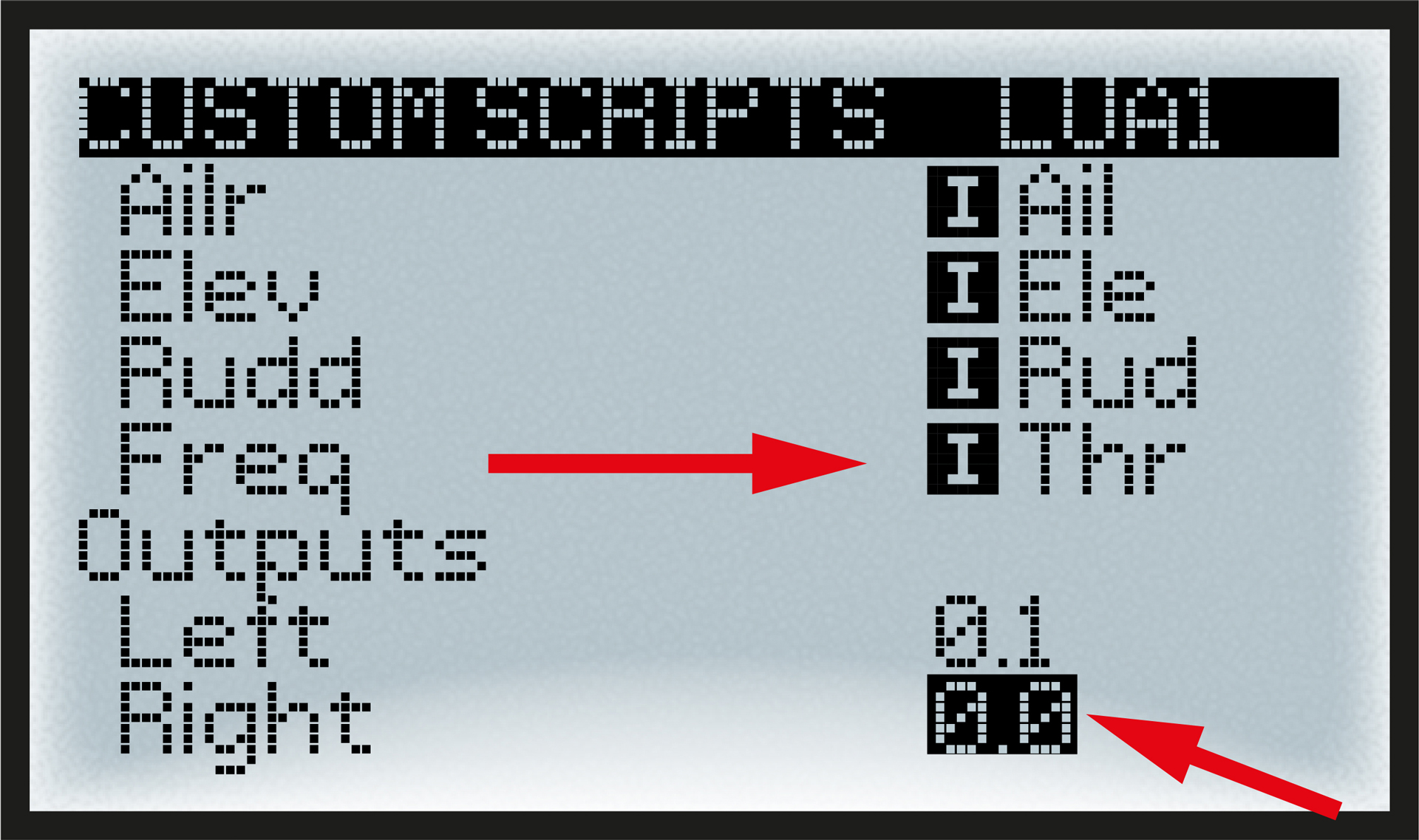
Naviger dans les cinq entrées (Inputs) Ampl, Ailr, Elev, Rudd, Freq et assigner à chacune une entrée de la radio, manche ou bouton. Dans cet écran CUSTOM SCRIPT on peut également voir les sorties du script (Outputs) Left et Right, leurs valeurs doivent bouger si on pousse le manche des gaz. |
 |
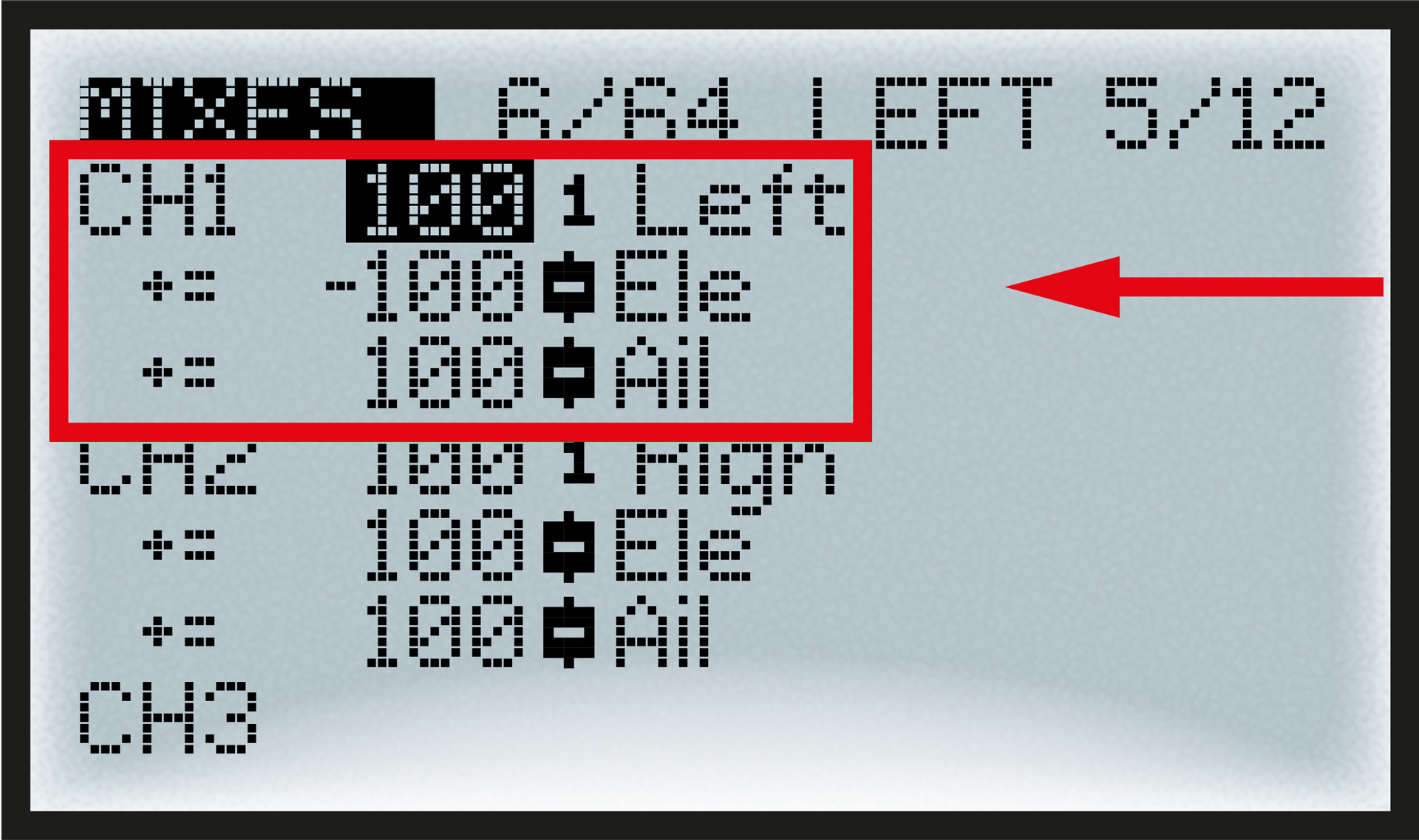
Enfin on va assigner ces deux sorties du script Left et Right en tant qu’entrées des canaux CH1 et CH2 où sont connectés les servos.
Dans le menu MODELES, aller à la page MIXES puis ouvrir CH1 et sélectionner Left comme source, utiliser la fonction Insert pour ajouter les Trims Ele et Ail. Toujours dans la page MIXES, ouvrir CH2 et sélectionner Right comme source, ajouter les mêmes Trims mais inversé pour Ele. |
 |
Les fonctions de Trims sont utiles pour corriger la trajectoire de Flap-Flap en vol (ne pas mettre les manches ici !).
A partir de là quand on “binde” le récepteur du Flap-Flap et qu’on bouge les manches les deux servos vont se mettre à bouger ensemble. Il ne reste plus qu’à programmer le poids des commandes comme sur n’importe quel modèle.
La minute technoLe script LUA va examiner
en continu cinq entrées pour calculer à tout instant
la position des servos. Ces entrées sont Amplitude,
Frequency, Aileron, Elevator
et Rudder. Mon choix est de mettre Frequency sur
les gaz et Amplitude sur un bouton, mais certains pilotes préfèrent
l’inverse, Amplitude sur les gaz et Frequency sur un bouton. |
Il faut tout d’abord vérifier la direction des manches, pour cela placer Flap-Flap sur le sol et réduire l’amplitude pour éviter qu’il ne bondisse quand on met les gaz. Puis actionner chaque manche un par un et vérifier les mouvements :
- Ail
 La queue doit pencher vers l’intérieur du virage
La queue doit pencher vers l’intérieur du virage - Ele
Les ailes montent en poussant et descendent en tirant
- Thr
Les ailes battent de plus en plus vite en poussant
- Rud
Réduit l’amplitude de l’aile intérieure au
virage (en vol)
L’axe Ele de Flap-Flap est très efficace et il faut le réduire pour éviter de faire des loopings ou du Yoyo. L’axe Rud est aussi assez sensible et peut être réduit. |
 |
L’axe Ampl est un compromis entre un Flap-Flap qui s’écrase et un qui brûle ses moteurs. Habituellement 50% est un bon choix, et en maintenant la fréquence au minimum acceptable, on peut faire des vols de 5 à 6 minutes.
 |
 |
|
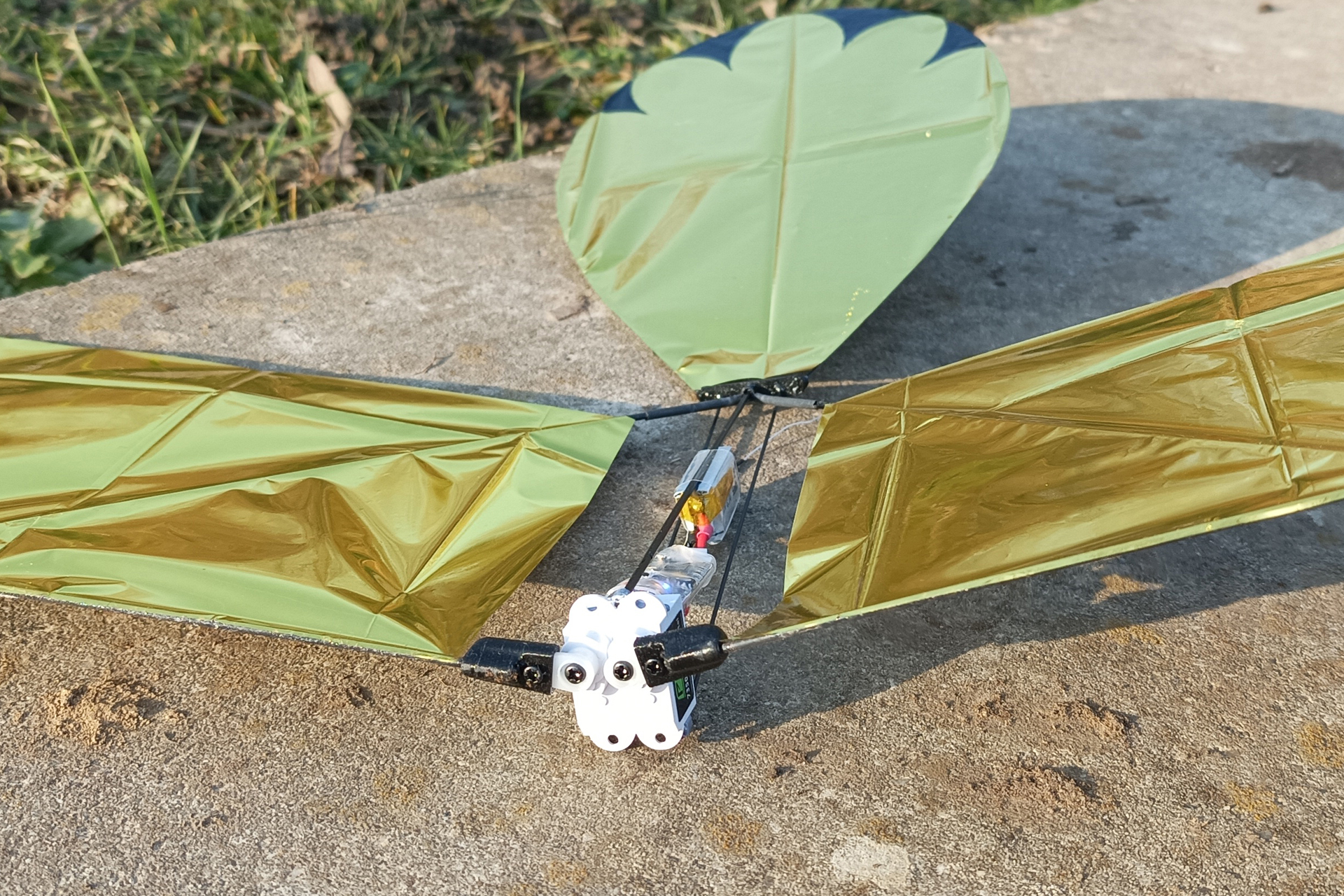
Si possible, effectuer
les premiers vols en salle afin de bien régler le modèle
et comprendre son comportement. |
||
L’expérience a montré que chaque Flap-Flap a sa personalité propre, le mien vole au mieux quand la Li-Po est attachée à la tige #7 (avec du scotch) juste au-dessus du récepteur.
Piloter Flap-Flap |
 |
 |
|
 |
||
Le pilotage du Flap-Flap
exige un peu de prise en main. Il faut apprivoiser l'oiseau... |
||
Quand on maîtrise le pilotage d’un avion, l’affectation des commandes de vol telles que décrites dans le chapitre précédent permettent de faire voler le Flap-Flap sans devoir apprendre une nouvelle logique de vol (contrairement au passage de l’avion à l’hélico ou au drone par exemple).
 |
 |
Toutefois, même si on a bien les trois axes aux manches, le comportement de l’engin en vol est plus proche d’un avion deux axes, les ailerons ne vont pas vraiment agir sur le roulis et il faut donc “touiller la mayonnaise” pour maîtriser les deux axes du Flap-Flap :
- Le vol à plat (tangage) se fait avec le manche de profondeur exactement comme un avion qui serait super sensible à la prof.
- Le virage (lacet & roulis) est le résultat d’un enchaînement plus qu’un simple ordre aux ailerons, j’essaie de le décomposer ci-après.
 |
 |
Il faut se souvenir que c’est principalement l’inclinaison de la queue - résultat de la commande d’ailerons - qui fait virer, elle joue un peu le rôle du dièdre sur un deux axes. La première condition c’est donc de s’assurer qu’on a du vent relatif (on avance ou on a le nez dans le vent) avant de donner des ailerons.
 |
 |
La seconde condition pour que la queue fasse virer, c’est son angle d’attaque dans le vent relatif. Cet angle d’attaque est négatif par construction et il peut être amplifié si on fait piquer le Flap-Flap. Ne pas hésiter donc à pousser un peu le manche de profondeur en même temps que l’on donne des ailerons. Attention, dès qu’il commence à virer de cette manière le Flap-Flap part très vite en virage engagé, la meilleure façon d'en sortir est de ramener les ailerons au neutre et de réduire les battements.
 |
 |
Le dernier élément du virage est la commande
de dérive, elle ne peut généralement pas faire virer
le Flap-Flap à elle toute seule, mais elle apporte une aide sur
l’axe de lacet qui peut éviter le virage engagé décrit
ci-dessus.
Un virage réussi va donc monopoliser tous les manches en même
temps.
 |
ANNEX1 – Flap-Flap LUA ScriptMise à jour du 17 mars 2026
Le premier script SFO3.lua fourni pour Flap-Flap est plutôt simple dans son principe, il calcule les deux positions extrêmes "Haut" et "Bas" des ailes et les envoie aux servos quand il est temps. C’est d’une efficacité éprouvée par tous ceux qui ont mis des Flap-Flap en l’air depuis la publication de cette notice. Toutefois ce mouvement des ailes que je qualifie de "Min-Max" pose plusieurs problèmes :
Pour améliorer ces points, un nouveau principe de calcul m’a été proposé par un des membres du club de Colombes – Gérard - sous la forme d’un mouvement dans lequel on donne aux servos un plus grand nombre de positions pendant le battement et ces positions étant calculées avec une fonction sinus, elle font un mouvement plus amorti.
Le battement des ailes sinusoïdal a tout de suite prouvé son efficacité lorsque la fréquence de battement est faible, un mouvement plus réaliste et moins violent pour les servos. Toutefois lorsque la fréquence augmente, du fait de la période de commande globale (écart temporel entre deux ordres aux servos) qui varie entre 40 et 60 millisecondes, la forme du sinus ne peut plus être respectée. Le résultat est que lorsqu’on augmente les gaz pour avoir de la puissance, le mouvement des ailes devient cahotique et inefficace. Pour rester efficace à haute fréquence, j’ai fini par écrire le script SINMM.lua qui associe le "sinus" à basse fréquence avec le "Min-Max" à haute fréquence. Le niveau de la transition se situe à 20% de gaz environ. Comme ce script a deux modes de vol distincts, j’ai ajouté une nouvelle entrée bouton qui s’appelle "Plus" et qui permet de régler finement l’amplitude de battement du mode sinusoidal. Le paramètre "Plus" vient s’ajouter en vol sinusoidal à l’amplitude globale gérée par l’entrée "Ampl". Avec SINMM.lua j’ai également constaté que mon Flap-Flap obéit beaucoup mieux aux odres de "dérive" quand on est à basse fréquence (mode sinus). La procédure d’installation et les réglages restent les mêmes que pour la version précédente. Attention il y a une entrée en plus : "Plus" à mettre sur un bouton comme c'est le cas pour "Ampl". Bons vols ! |


Flap-Flap|rt (Round Tail)Par Laurent Berlivet (Mise à jour du 12 février 2026)
Cette version du Flap-Flap diffère
très légèrement de l'originale. La principale
différence vient de sa queue arrondie. Au lieu d'avoir
un jonc recoupé en 3 puis recollé, c'est un seul
jonc de 50 cm courbé qui forme la queue, plus facile à
mettre en œuvre et plus solide.
|
||||||||||||||||||||||||||||||||||||||||||











Contacter l'auteur : Thierry Joubert
 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||