Quand en décembre 2009 j'ai vu le film «Avatar»
au cinéma avec les scènes de vol dynamiques du Samson,
j'ai tout de suite compris : je devais construire et piloter cet
hélicoptère futuriste. Le lendemain, j'ai commencé
à chercher des infos sur le Duocopter original (ou bicopter)
et fut déjà capable de voler. Sur Internet, il n'y avait
pas grand-chose à trouver sur le vol du Duocopter et ce que j'ai
vu était plutôt prêtait plutôt à sourire.
Avatar RC Bicopter
von Ralph Kayser
Caractéristiques
techniques
Longueur : 840 mm
Largeur : 750 mm
Hauteur : 250 mm
Poids : 1600 g
Motorisation : 2x Moteur Brushless Dymond AL3530 1100 kV
Hélices : 2x Graupner 9x5 E-3 pales ( R+L )
Contrôleurs : 2x HK Afro ESC 30A
Servos : 2x Graupner DES 658 BB MG
Accus : 1x Zippy 40C 4S 2100 mAh
Temps de vol : 4,5 minutes (1500 mAh)
Carte de vol : HK KK 2.15 avec Programme Duocopter RC 911
BEC : HK YEP 20A HV
Radio : Récepteur Jeti R5
Télémétrie : SM Uni-Sens-E
Je pilote et construits des modèles réduits d'hélicoptères
depuis 1984. Cependant je n'avais aucune expérience des tandems
et autres multicoptères. Mes premières tentatives ont
vu le jour : une simple plaque de base avec une mécanique
de Tiltrotor (moteurs basculants) ajustée sur le dessus avec
2 moteurs électriques et stabilisée avec 3 gyroscopes
à verrouillage de cap. Les résultats étaient encore
plus un sujet de sourire. Cela n'a pas fonctionné de cette façon…
En janvier 2011, la vidéo Youtube du sud-coréen Minsoo
Kim était disponible sur Internet. Il montrait un Hughes 500
de taille 450 avec un mécanisme de Tiltrotor attaché qui
volait de façon incroyablement stable.
Le Hugues 500 modifié
de Minsoo Kim qui volait en 2011
J'ai commandé le programme Blueboard avec Duocopter
à Minsoo Kim.
Je l'ai installé dans un vieux fuselage Hughes sur lequel
j'ai fixé mon ancienne mécanique.
Déjà le premier vol a montré un succès
complet !
Le Duocopter était facile à piloter et pouvait
être contrôlé en vols circulaires normaux
jusqu'à 25 km/h.
C'était le top départ pour construire la maquette
du fuselage du Samson.
Comme matériau, j'ai choisi le GRP (matériaux composites)
car j'avais déjà construit de nombreux fuselages pour
des hélicoptères Heim de cette façon. J'ai découpé
le master dans de l’Oriol, un matériau de construction
pour maquettes que j'ai sculpté à la main dans la forme
souhaitée. Les captures d'écran du film ont servi de modèle.
L'échelle a été déterminée par les
rotors équipés d’hélices à trois pales
GWS 9x5 contrarotatives disponibles.
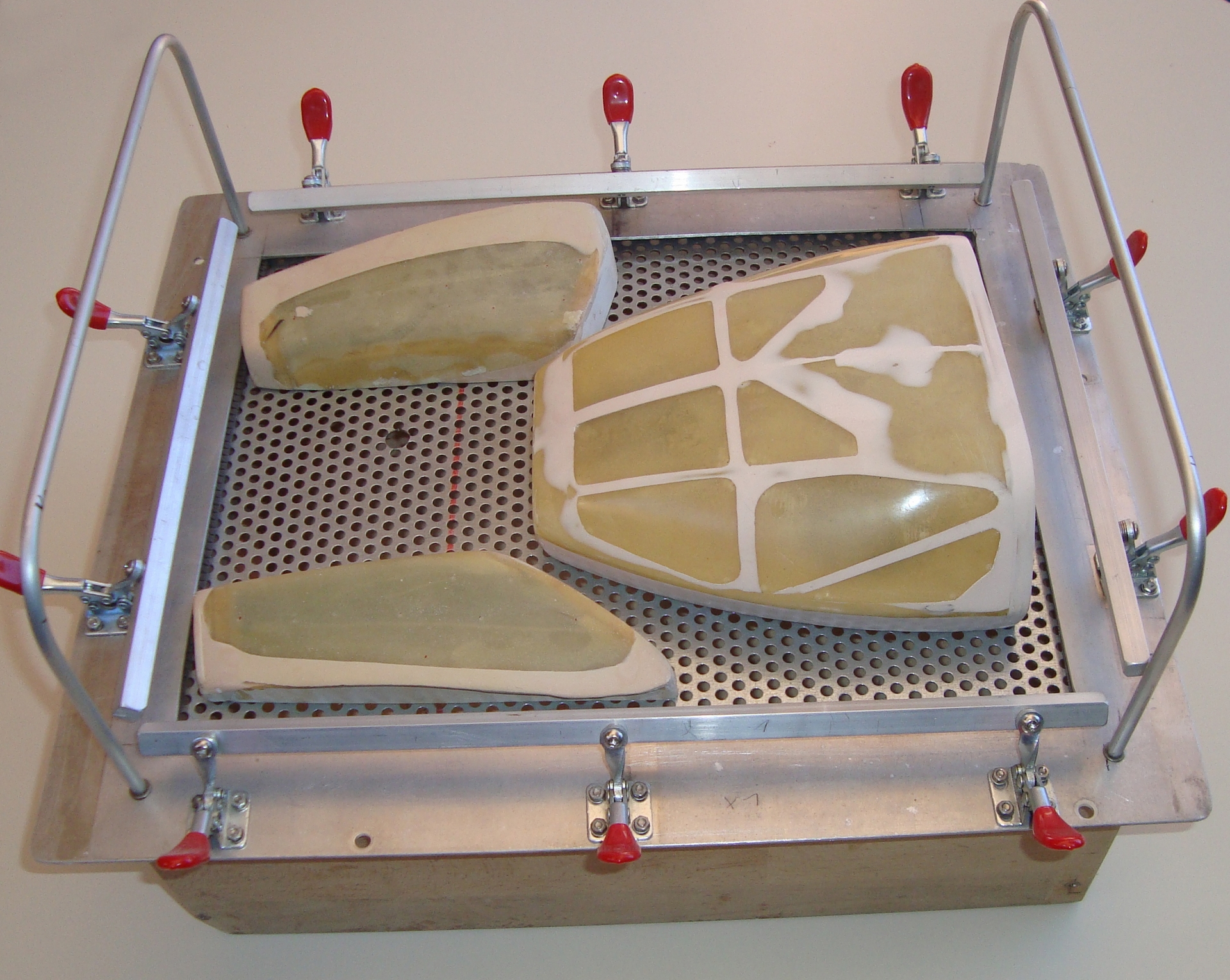
Les moules réalisés
sur mesure en résine.
Les pièces en fibre tirées
des moules.
Pour l'étape suivante, j'ai eu l'aide de mon ami maquettiste
Thomas Korte de Hanovre avec sa longue expérience dans la fabrication
de moules. J'ai tout appris sur le traitement GRP et j'ai pu créer
les moules moi-même. En janvier 2012, j'ai tenu le premier fuselage
démoulé entre mes mains, une sensation indescriptible.
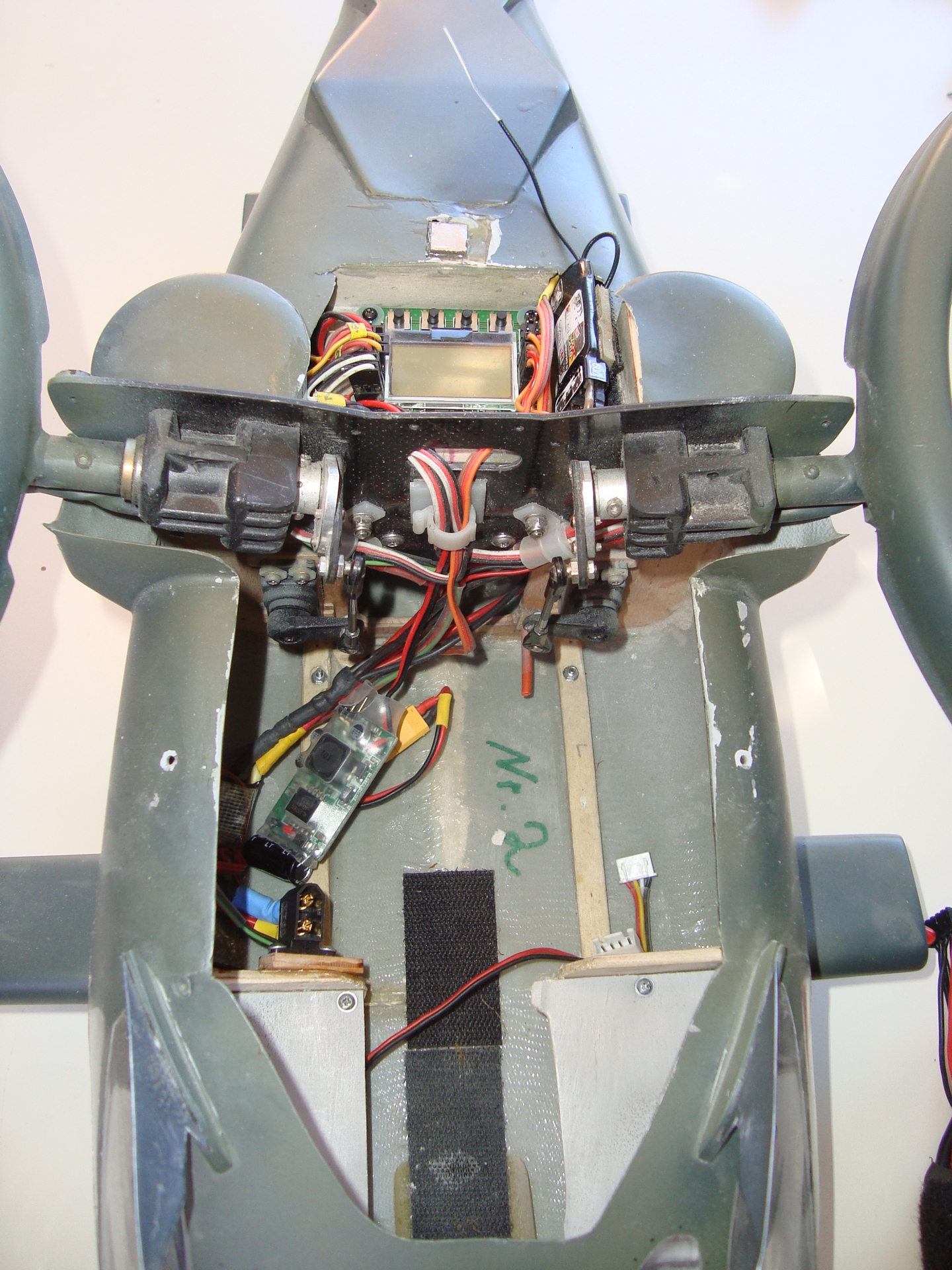
Le mécanisme de la nacelle a été conçu pour
correspondre au fuselage et les anneaux de protection du rotor ont également
été installés. Puis ce fut le choc du premier vol…
Les bonnes caractéristiques de vol du Hughes n'étaient
plus là. Le Samson relevait le nez brusquement, même avec
une vitesse d’avancement moyenne ou un vent de face. La raison
était le centre de gravité qui était significativement
plus bas que sur le Hughes plus étiré en hauteur.
Le prototype du Samson qui va nécessiter
un peu de mise au point pour les réglages, même s'il
pouvait déjà voler.
Entre-temps, un nouveau contrôleur de vol était disponible
sur le marché, le KK 2.0 avec écran LCD. Une interface
utilisateur permet de relier le mélangeur et le gyroscope entre
eux. Cela offrait la possibilité de régler le système
mieux et plus rapidement, mais le cabré à grande vitesse
restait. Comme solution d'urgence, j'ai installé un petit moteur
sans balais avec une hélice 5x3 suspendu à l'intérieur
de la queue. L'hélice tournait à basse vitesse pendant
le fonctionnement normal et était poussée à plein
régime par la carte KK pendant l’accélération
du modèle.
Les nombreux vitrages ont été
thermoformé.
La mécanique qui permet
d'incliner les deux rotors.
Sur cette première version, un
troisième moteur avait été ajouté à
l'arrière pour atténuer l'auto-cabrage.
Les caractéristiques de vol étaient excellentes mais
mon Duocopter était visuellement impossible à distinguer
d'un Tricopter. Après avoir terminé les derniers détails
tels que le cockpit, le système d'échappement, le coupe-câble
et le pilote, tout a été peint à l’aérographe.
Après cela, l'hélicoptère de science-fiction a
volé seul lors de nombreux sorties de vol et lors de réunions
d'hélicoptères. J'ai été très surpris
du grand intérêt pour ma petite machine volante.
Puis au milieu de 2015 j'ai eu l'information que pour le contrôleur
de vol KK 2.15, il existait le logiciel RC 911 disponible qui permet
de programmer un auto-nivellement en fonction de la position du manche.
Un fuselage plus ancien a été installé et des vols
d'essai ont pu commencer.
Après 2 vols, j'ai pu retirer le rotor de queue et après
quelques réglages, le Samson vole maintenant, aussi stable que
le T-Rex 450 avec V-stabi. Il n'y a pas de cabré même par
vent fort ou à grande vitesse car l'auto-nivellement corrige
immédiatement. La contrôlabilité est réglable
via la carte ou au niveau de l'émetteur. Le Duocopter est ainsi
devenu un appareil parfaitement adapté à un usage quotidien.
Les nombreux détails donnent
du cachet à cette maquette.
Vol stationnaire.
Retour dans la main.
Les 2 appareils en vol avec Maurice Rudolf.
Le Samson SA 2 en
vol dans un salon du modélisme en Allemagne
Construire et tester le Samson a été plus amusant au
fil des ans que n'importe lequel de mes hélicoptères RC
conventionnels.