When in December 2009 I saw the film “Avatar” in
cinema with the dynamic flight scenes of Samson it was clear to me immediately,
I have to build and fly this futuristic helicopter. The next day I started
to search something about the original and already flying Duocopter.
In the internet there was not too much to be found about flying Duocopter
and what I saw was rather something to smile.
Avatar RC Bicopter
von Ralph Kayser
Technical characteristics
Length: 840 mm
Width: 750 mm
Height: 250 mm
Weight: 1600 g
Motorization : 2x Brushless Dymond AL3530 1100 kV motors
Propellers: 2x Graupner 9x5 E-3 blades ( R+L )
Controllers: 2x HK Afro ESC 30A
Servos : 2x Graupner DES 658 BB MG
Battery: 1x Zippy 40C 4S 2100 mAh
Flight time: 4.5 minutes (1500 mAh)
Flight card: HK KK 2.15 with Duocopter RC 911 program
BEC: HK YEP 20A HV
Radio: Receiver Jeti R5
Telemetry: SM Uni-Sens-E
I have flown and built model helicopters since 1984, however, with
tandems and copters I had no experience. Then followed the first attempts,
a baseplate with adjusted Tiltrotor mechanic on top with 2 electrical
motors and stabilized with 3 heading lock gyros.
My results were even more something to smile about. It didn't work out
that way. In January 2011 the Youtube video of the South Korean Minsoo
Kim was available in the internet. It showed a Hughes 500 in 450 size
with attached Tiltrotor mechanism which flew amazingly stable.
Minsoo Kim's modified Hugues 500
which flew in 2011
I ordered the Blueboard with Duocopter program from Minsoo
Kim.
I installed this into an old Hughes fuselage on which I fixed
my previous mechanic.
Already the first flight showed: Complete success!
The Duocopter was easy to fly and could be controlled in normal
circular flights up to 25 kmh.
That was the starting shot for the Samson's scale fuselage.
As material I chose GRP, because I had built many Heim fuselage helicopters
before. I built the master model from Oriol, a model building material
which I grinded by hand into the desired form. Screenshots from the
film served as a template. The scale was determined by the available
counter-rotating GWS 9x5 three-blade props.
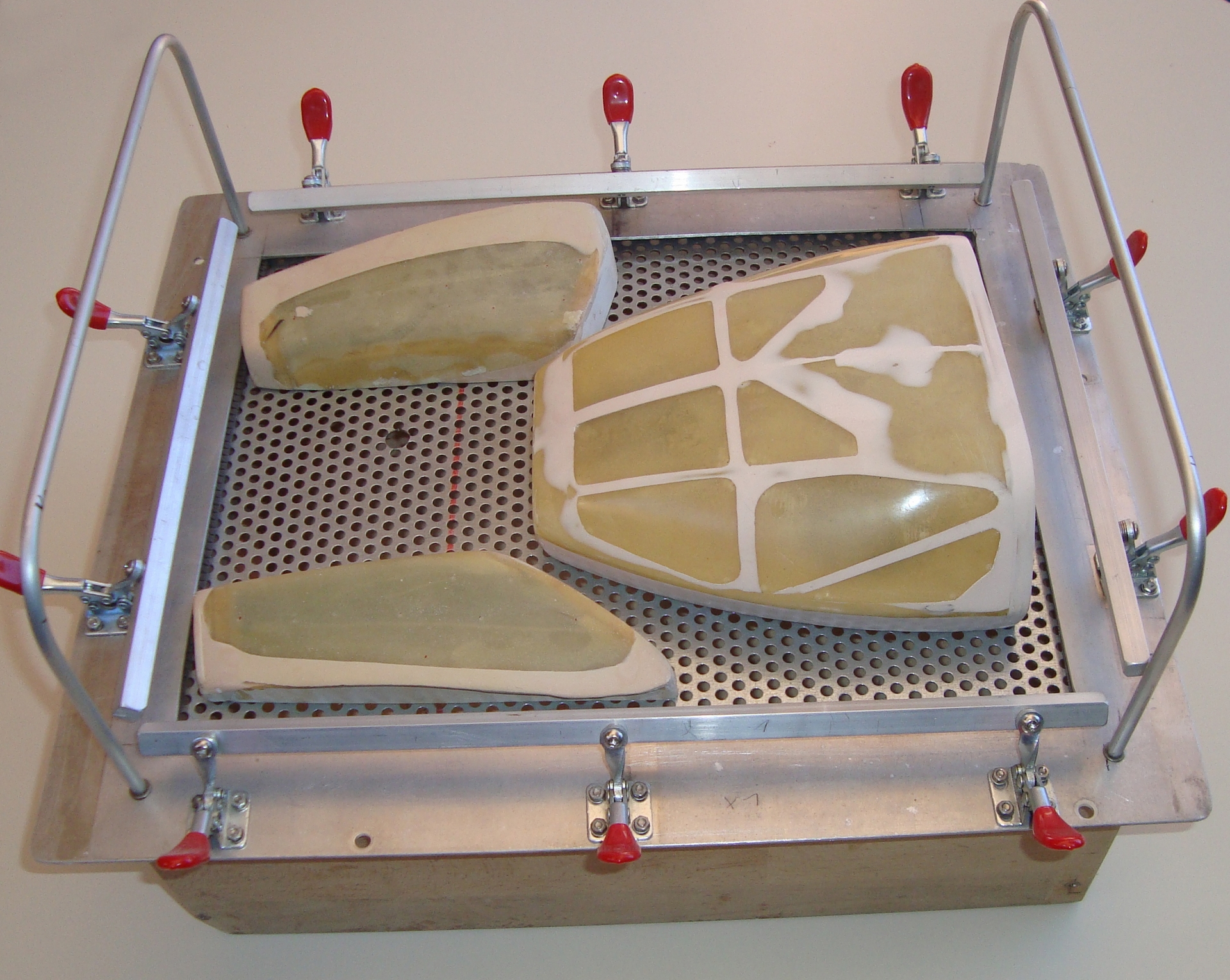
The molds made to measure in resin.
The fiber parts taken from the
molds.
For the next step I had the help of my modelling friend Thomas Korte
from Hannover with his long experience in mould making. I learned all
about GRP processing and was able to create the forms myself. In January
2012 I held the first demoulded fuselage in my hands, an indescribable
feeling. The nacelle mechanism was designed to match the fuselage and
the rotor protection rings were also fitted.
Then the shock of the first flight, the good flight characteristics
of the Hughes were no longer there. The Samson picked up it’s
nose abruptly even with medium forward speed or headwind. The reason
was the center of gravity which was significantly lower at the high
Hughes.
The prototype of the Samson which
will require some fine-tuning for the settings, even if it could
already fly.
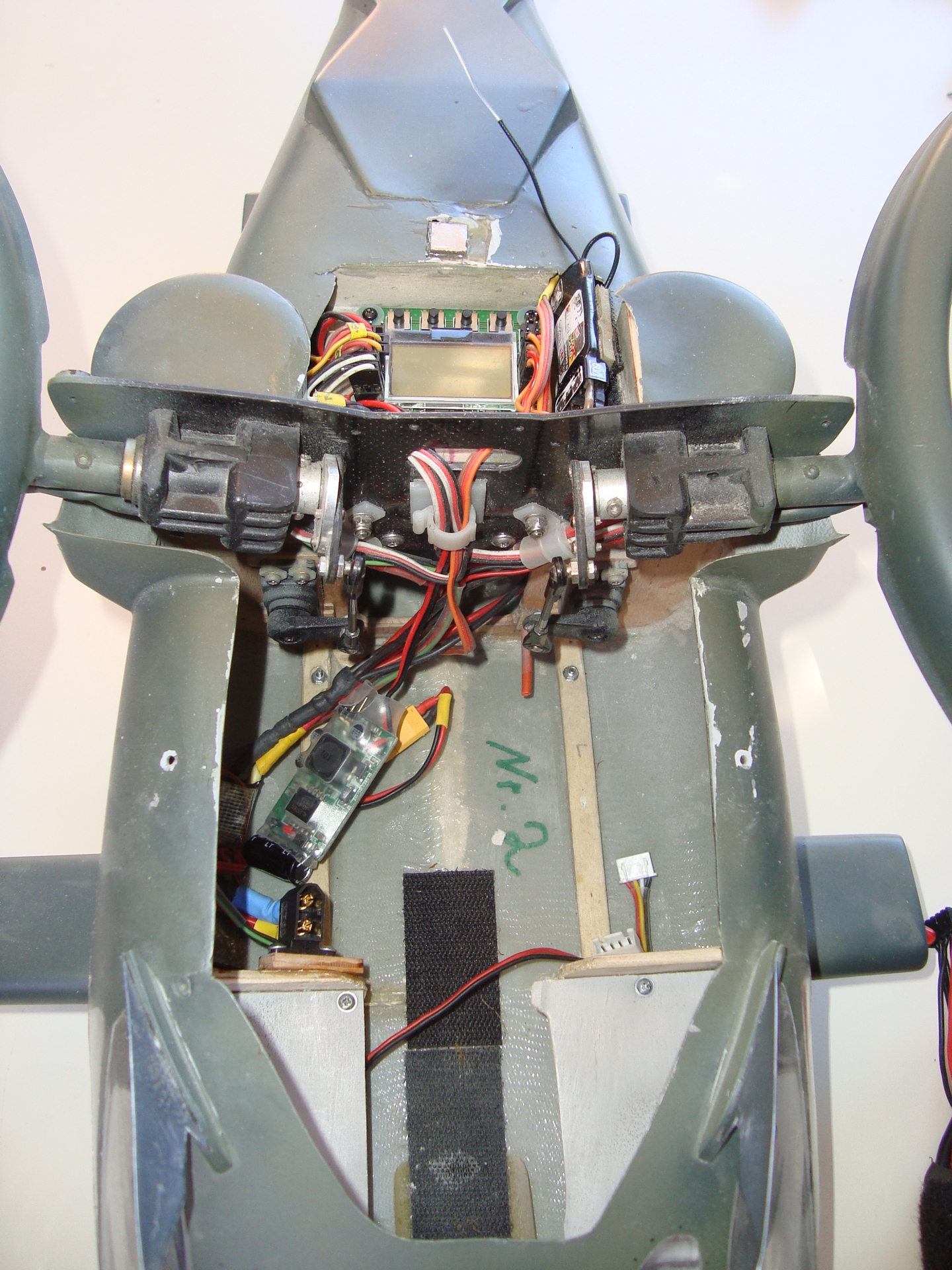
In the meantime a new flight controller was available on the market,
the KK 2. 0 with LCD display. A user interface allows to link mixer
and gyro with each other. This offered the possibility to tune the system
better and faster but the pitching nose up at high speed remained. As
an emergency solution I installed a small brushless motor with a 5x3
prop hanging inside the tail. The prop was running at low speed during
normal operation and was brought to full throttle by the KK board during
the rebound of the model.
The many windows have been thermoformed.
The mechanics that allow the two
rotors to be tilted.
On this first version,
a third engine had been added to the rear to reduce self-pitching.
The flight characteristics were excellent but my Duocopter was optically
indistinguishable from a Tricopter. After finishing the last details
such as cockpit, exhaust system, cable cutter and pilot everything was
airbrushed. After that the SCI-Fi helicopter was flown by myself on
many flying days and helicopter meetings. I was very surprised about
the great interest in my little flying machine.
Then in the middle of 2015 I got the information that for KK 2. 15
flight controllers there is the RC 911 software available which allows
to program a self-leveling depending on the stick position. An older
fuselage was fitted within and test flights could be started.
After 2 flights I was able to remove the tail rotor and after fine
tuning the Samson flies like a scale T-Rex 450 with V-stabi. There is
no pitching nose up even in strong wind or high speed because the self-leveling
corrects immediately. The controllability is adjustable via the board
or at the transmitter. The Duocopter has thereby become a fully adequate
aircraft suitable for everyday use.
The many details give character
to this model.
Hovering flight.
Back in hand.
The 2 aircraft in flight with Maurice Rudolf.
The Samson SA 2 in
flight at a model fair in Germany.
Building and test flying the Samson has been more fun over the years
than any of my conventional RC helicopters.