Détournement
de matériaux...
Présentation : Eric Latour (Gardiolo)
Dans la lignée du Quad
9 et pour changer un peu de la multitude de châssis de quadricoptères
en "X" ou en "+" qui sont actuellement commercialisés,
j'avais repéré il y a quelques mois une forme en "H"
plutôt sympa et originale sur un site internet américain.
FliteTest, c'est le nom du site, est une véritable
mine d'or (comme jivaro-models.org bien entendu !) pour les idées
et astuces en tout genre.
On y trouve quantité de vidéos, tests, tutoriels dont
celui du fameux H-Quad.
Cette géométrie, plutôt simple
à réaliser, permet d'utiliser des matériaux très
courants et faciles à se procurer comme les profilés d'aluminium
carré ou en U, du contre-plaqué et du tasseau de pin...
Le prix de revient en est donc dérisoire et on peut rapidement
avec quelques vis ou un peu de colle à bois s'en construire un
exemplaire, tout en se débarrassant des chutes qui s'entassent
dans les ateliers, les caves ou les garages...
Un des membres actif du site, Jake Wells, en a même monté
un en utilisant des bûches tirées d'un peuplier tombé
dans son jardin lors d'une tempête !
Si, si, je ne plaisante pas, la
preuve en images
 |
 |
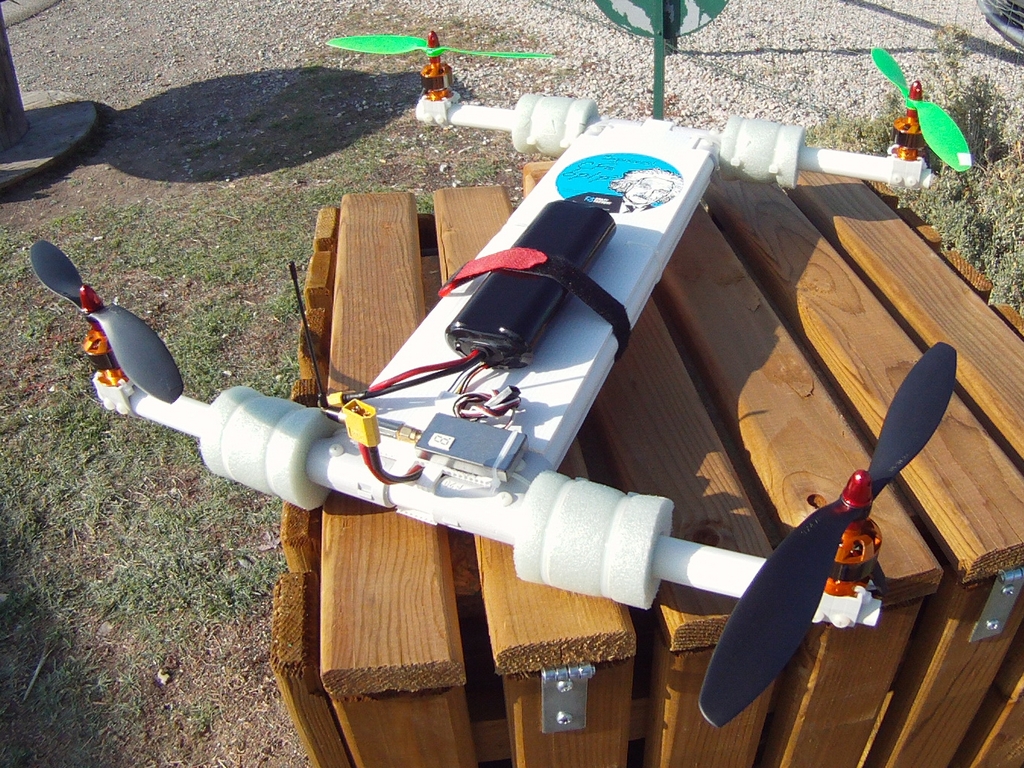
Le Quadriolo, c'est un
quadricoptère qui possède un châssis en PVC,
matériau bon marché qui se travaille très
facilement. |
L'intégration du matériel est largement
facilitée par la surface importante de la partie centrale faisant
office de "fuselage".
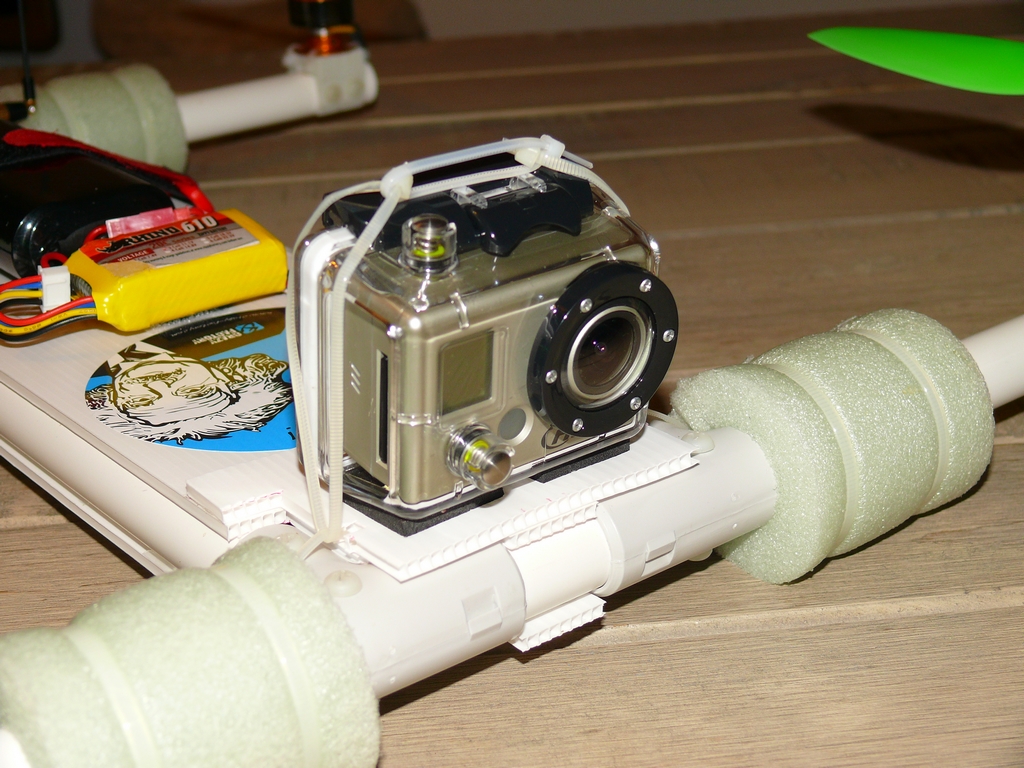
L'emport de caméra vidéo, genre Gopro, pour les prises
de vues aériennes est également simplifié. Leur
position très en avant, entre les 2 moteurs, rend les hélices
invisibles à l'image, ce qui est rarement le cas avec le grand
angle de la lentille de ces petits bijoux montés sur d'autres
formes de châssis.
Un équipement d'émission FPV (first person view ou vol
en immersion pour ceux qui ne le sauraient pas encore !) y trouve également
très facilement place.
Autre intérêt, le déplacement de la batterie sur
la platine, immobilisée par un velcro autocollant + une sangle,
assure un centrage précis et réglable à volonté
en fonction du matériel embarqué.
Enfin bref, j'avais gardé dans un coin, en mémoire, le
châssis en "H" et, à l'occasion d'une petite
visite dans une grande surface de bricolage (pour acheter une plaque
de Dépron...), j'ai marqué un temps d'arrêt dans
le rayon électricité... Eurêka !
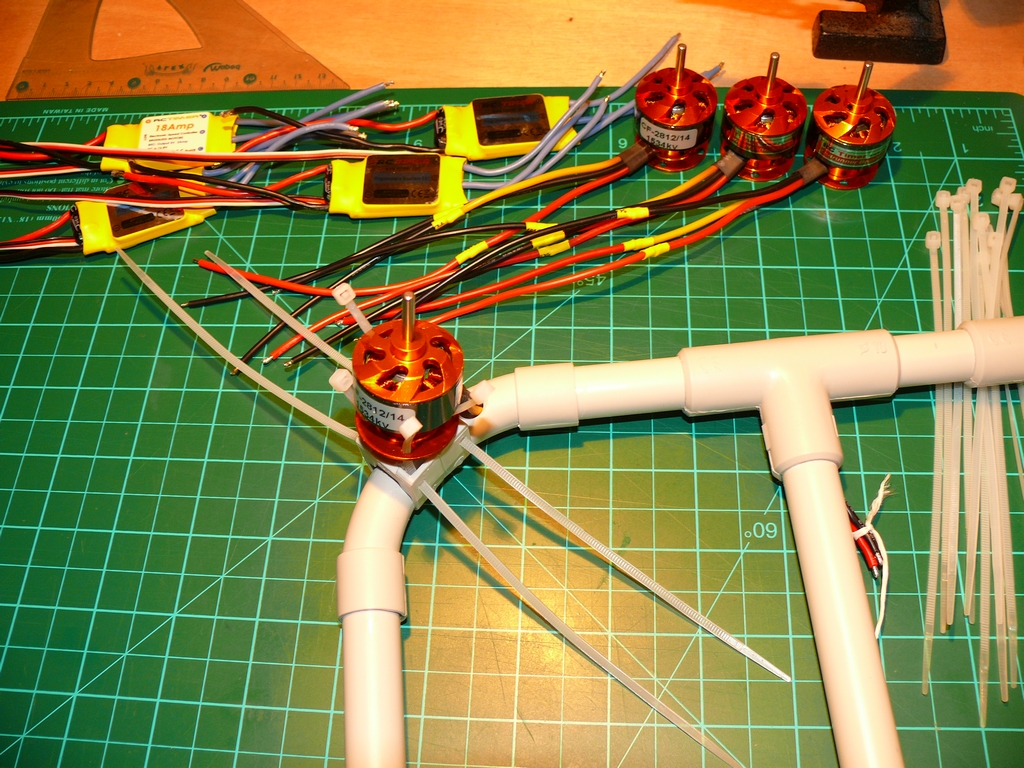
Pour une petite pincée d'euros, on trouve dans
ce fameux rayon des tubes IRL (Isolant/Rigide/Lisse) en PVC et leurs
accessoires de fixation murale.
En gros, tout le nécessaire pour concevoir un quadricoptère
fait maison, innovant et facile à monter en quelques heures.
L'utilisation première de ces matériaux est d'abriter
et de guider du réseau de câbles électriques.
Ça tombait très bien tout ça, je comptais bien
y glisser les fils de mes contrôleurs...
 |
 |
| Ci-dessus, le petit Quadriolo en tube diamètre
16 mm, en forme de "O". |
La version en "H" en tube de 20 mm peut embarquer
tout le matériel pour l'immersion. |
Deux diamètres disponibles, 16 ou 20 mm en deux
couleurs, gris ou blanc, en 2,40 mde longueur.
Un seul tube suffit largement pour un modèle ainsi qu'une poignée
d'accessoires.
La difficulté principale était de fixer bien horizontalement
les moteurs à fond plat sur un tube rond !
Les clips sans chevilles me semblaient pouvoir être une solution
efficace moyennant un petit poil d'ingéniosité...
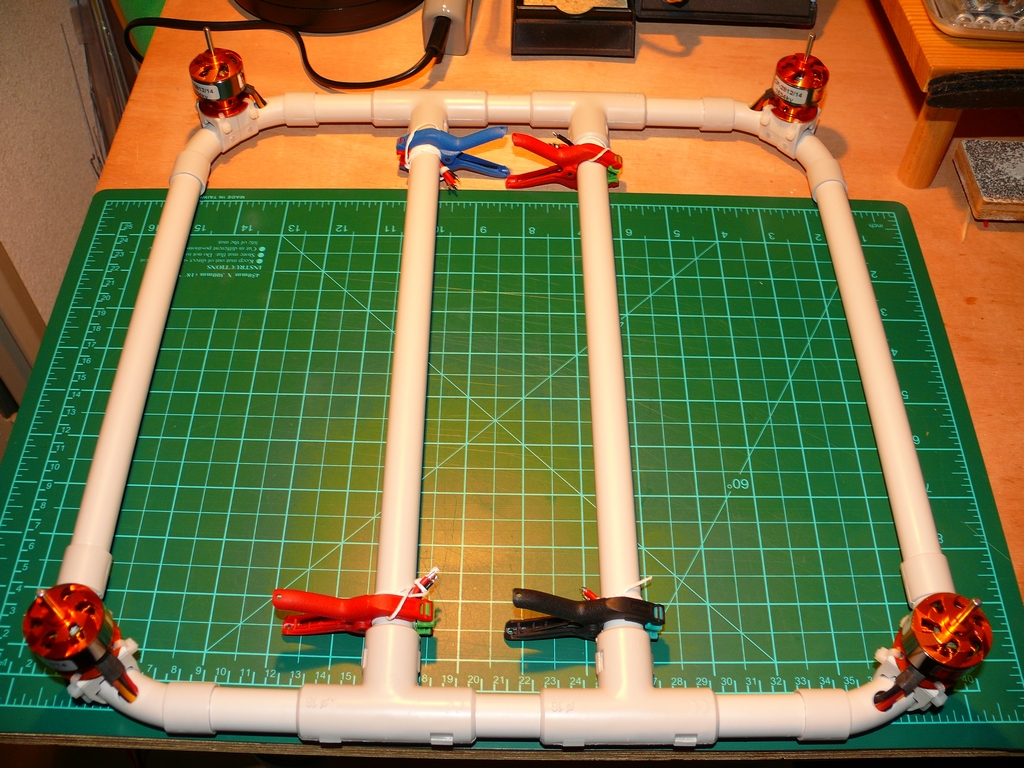
J'ai, pour le moment, monté deux modèles,
l'un en 20 mm (entraxe moteurs 580 mm mesuré en diagonale), l'autre
en 16 mm (entraxe moteurs 450 mm).
J'ai légèrement modifié la forme de "H"
en "O" du plus petit pour en augmenter la rigidité.
Les dimensions n'ont pas une importance capitale, à vous de voir
et de simplement réaliser un carré régulier avec
les 4 moteurs.
Le principe de construction reste exactement le même mais vous
comprendrez mieux en visionnant les quelques photos du tutoriel qui
m'a été plusieurs fois réclamé !
Au passage, j'en profite pour remercier l'entreprise
Debflex France, concepteur et fabriquant des tubes et accessoires (qu'ils
n'ont certainement jamais imaginé se décrocher d'un mur
et s'envoyer en l'air un jour...!) et qui donc, bien malgré elle,
me permet aujourd'hui de vous présenter, la suite en images...
 |
 |
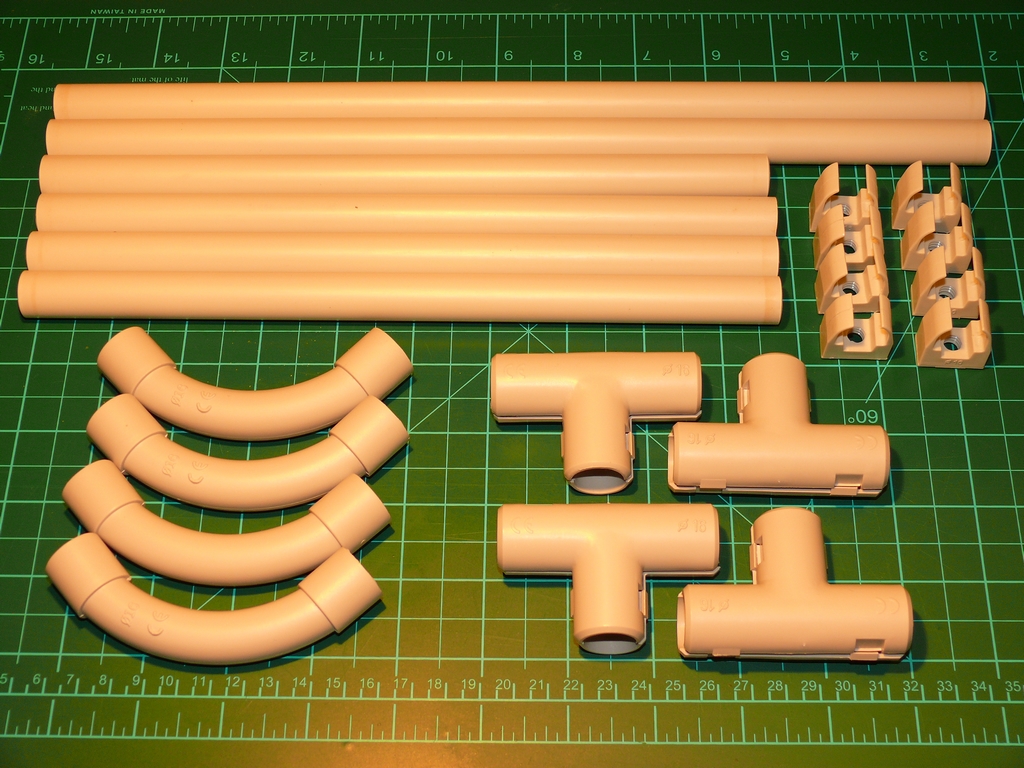
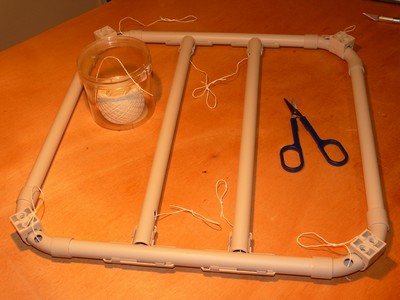
| Les accessoires : 4 tés, 4 coudes grand rayon ou
4 coudes équerre (non utilisés pour le moment), 8
clips de fixation murale (2 par support moteur), et 1 tube IRL tulipe. |
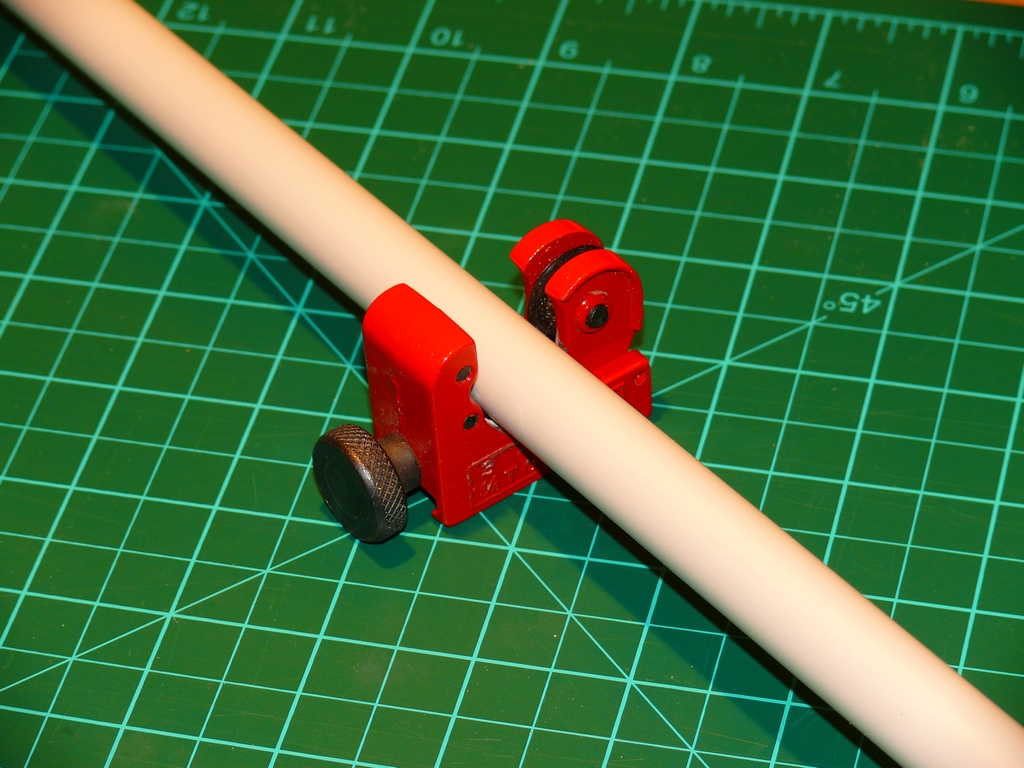
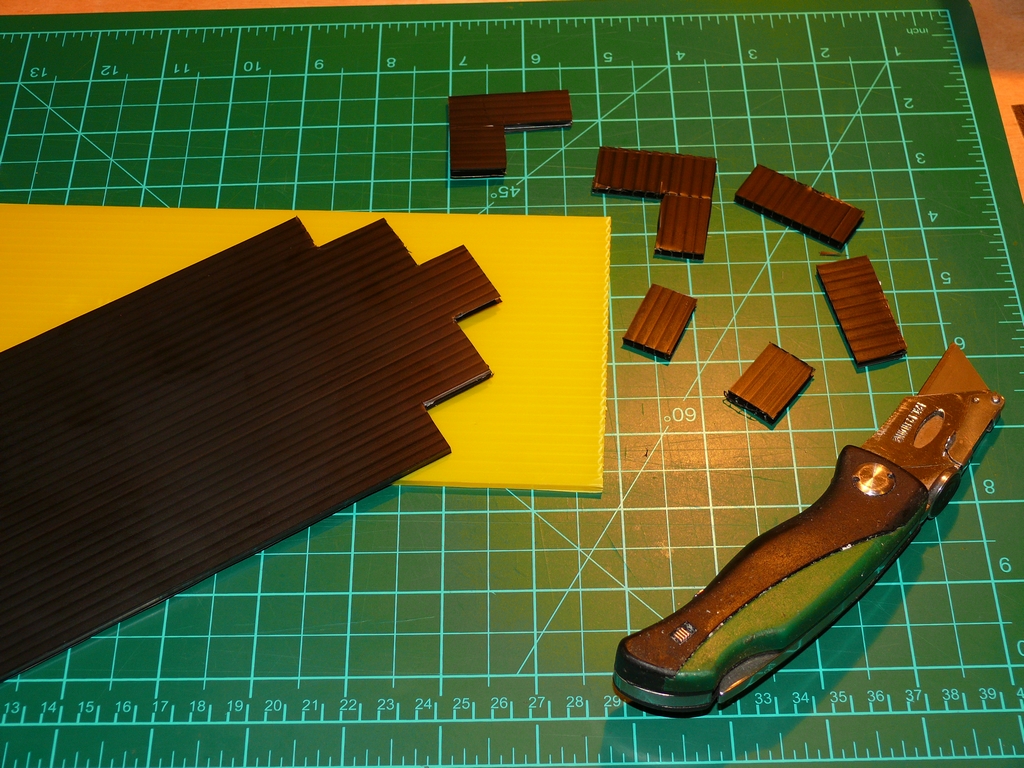
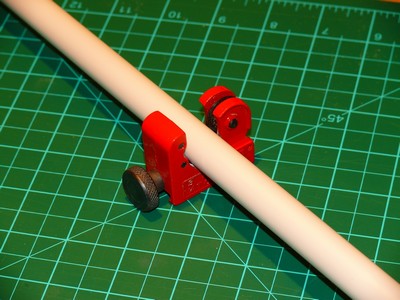
L'outil idéal pour couper proprement et précisément
le tube IRL : Le coupe-tube, utilisation nette et sans bavures.
|
 |
 |
Le kit découpé, prêt à coller
: 4 longueurs de 250 mm, 2 longueurs de 328 mm + tout le reste
|
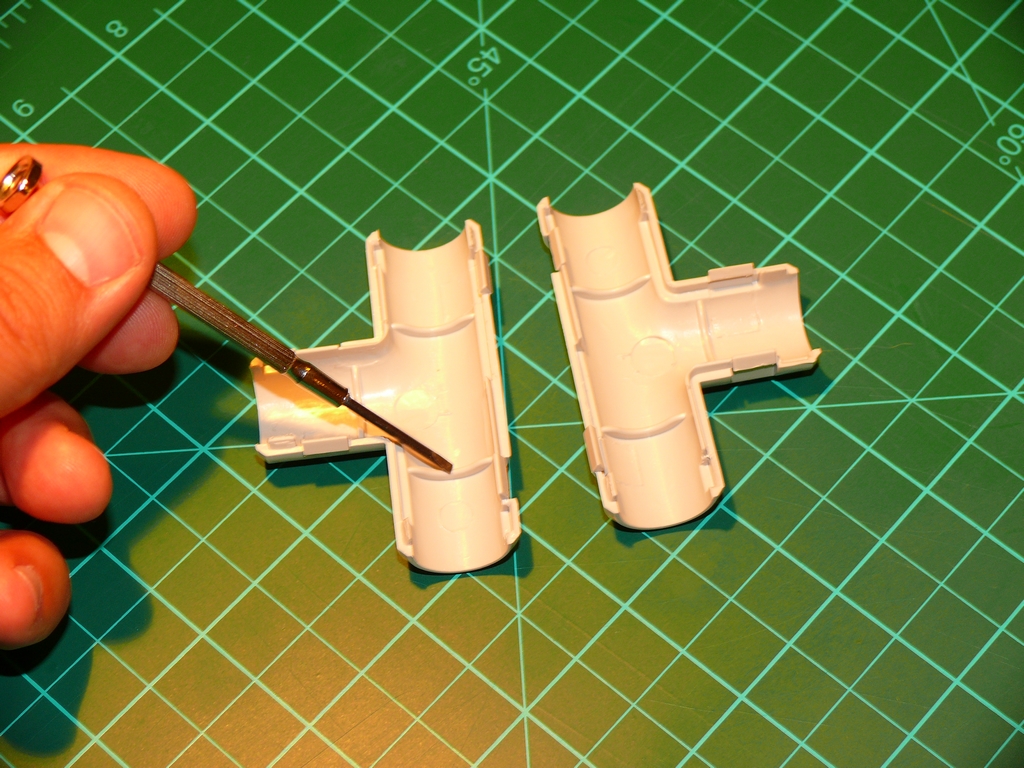
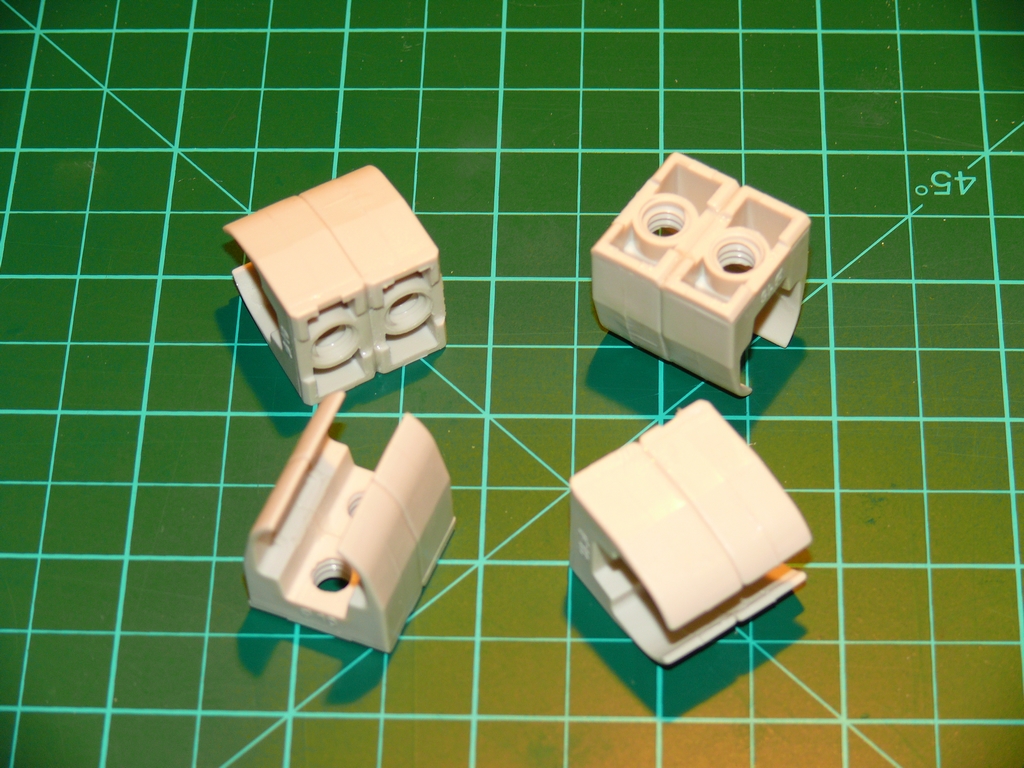
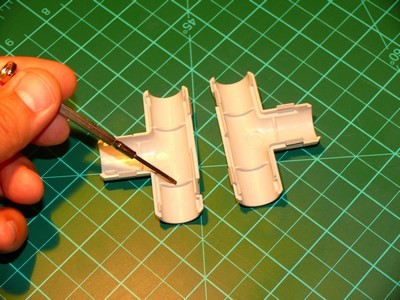
Déclipser délicatement un té avec
un petit tournevis plat.
|
 |
 |
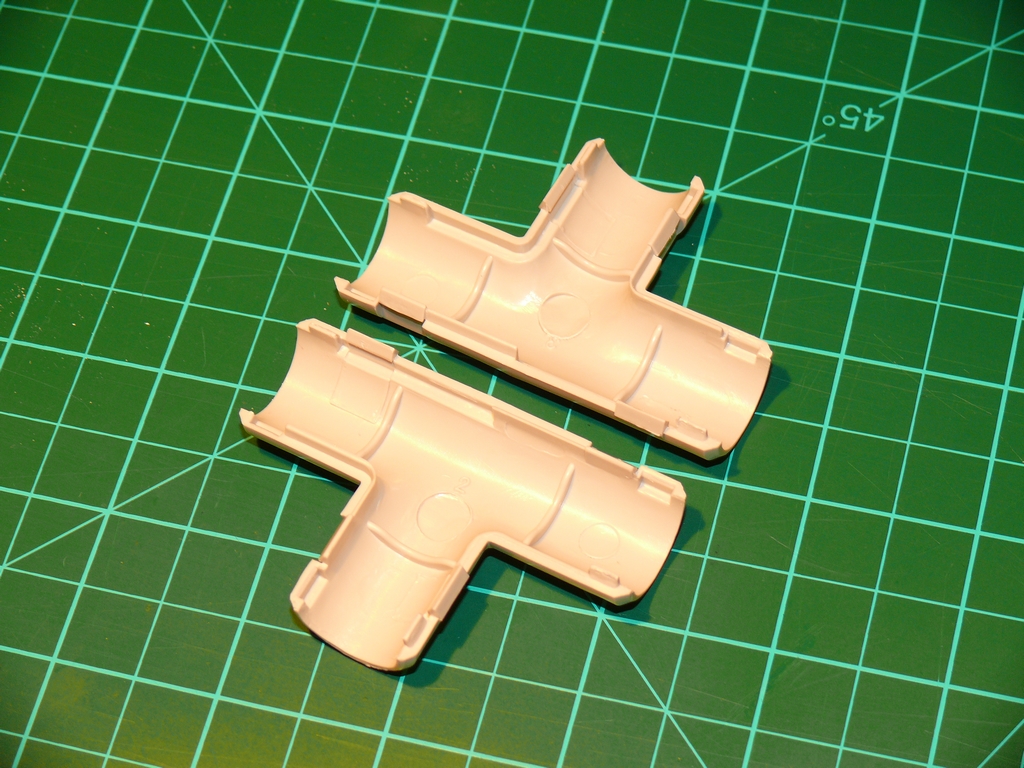
Un té déclipsé.
|
Les quatre tés après intervention du tournevis...
|
 |
 |
Bourrelet à éliminer.
|
Élimination à la ''Dremel'' + fraise.
|
 |
 |
Les bourrelets ont disparu.
|
Léger ponçage des extrémités
des tubes pour améliorer les collages. |
 |
 |
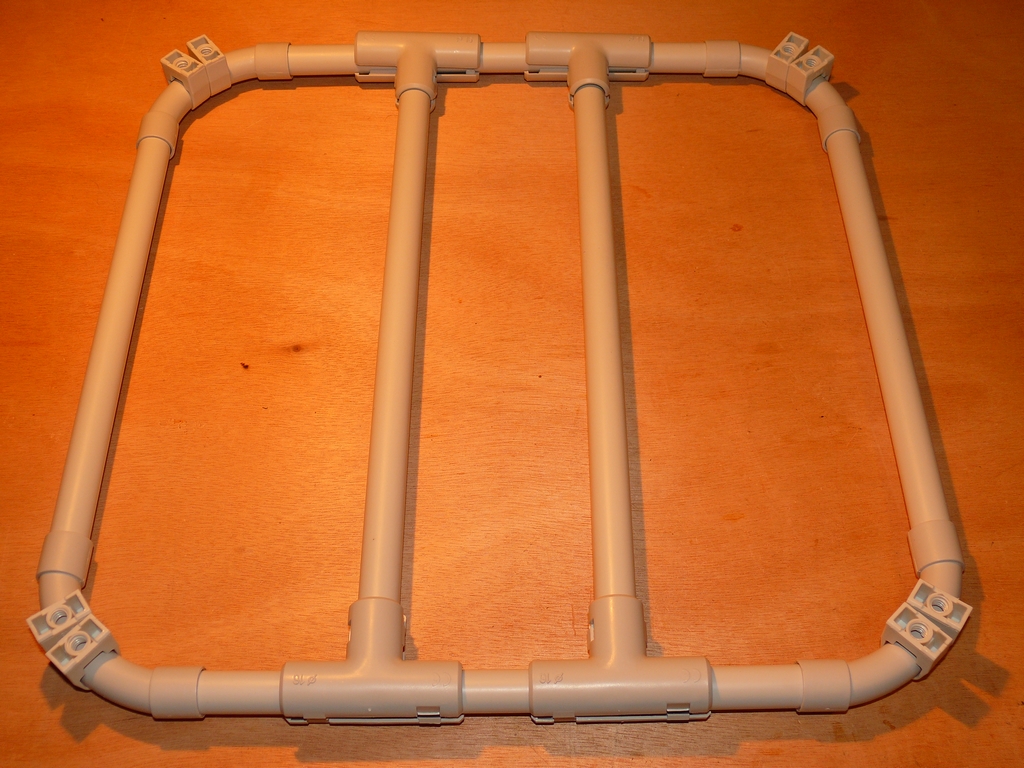
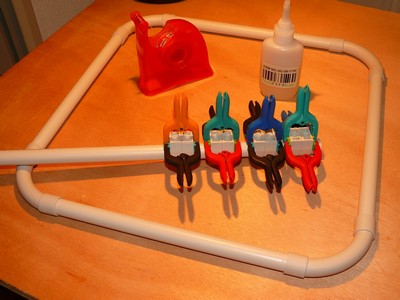
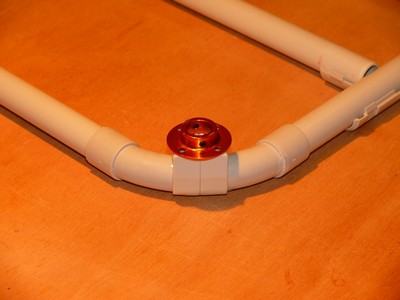
| Collage des 4 tubes de 250 mm et des 4 coudes grand rayon
avec colle cyanoacrylate ou pvc. |
Collages terminés.
|
 |
 |
Mise en place provisoire des pièces restantes.
|
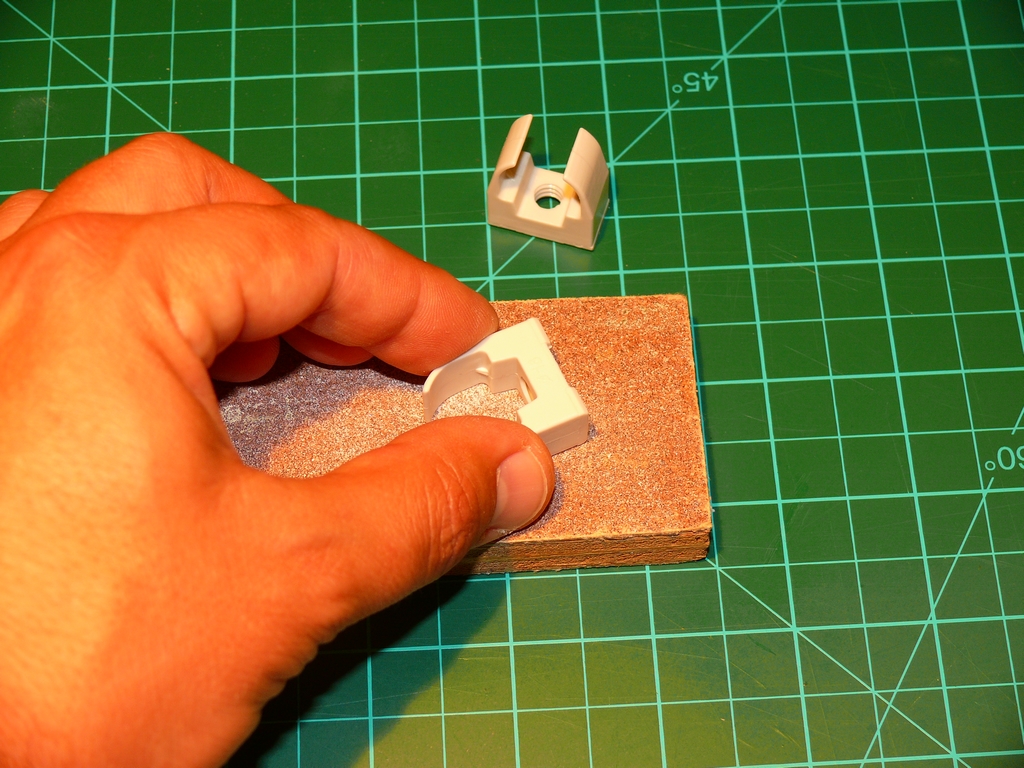
Léger ponçage des 2 faces en contact des
clips supports moteurs. |
 |
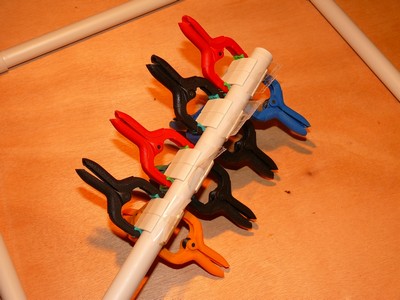 |
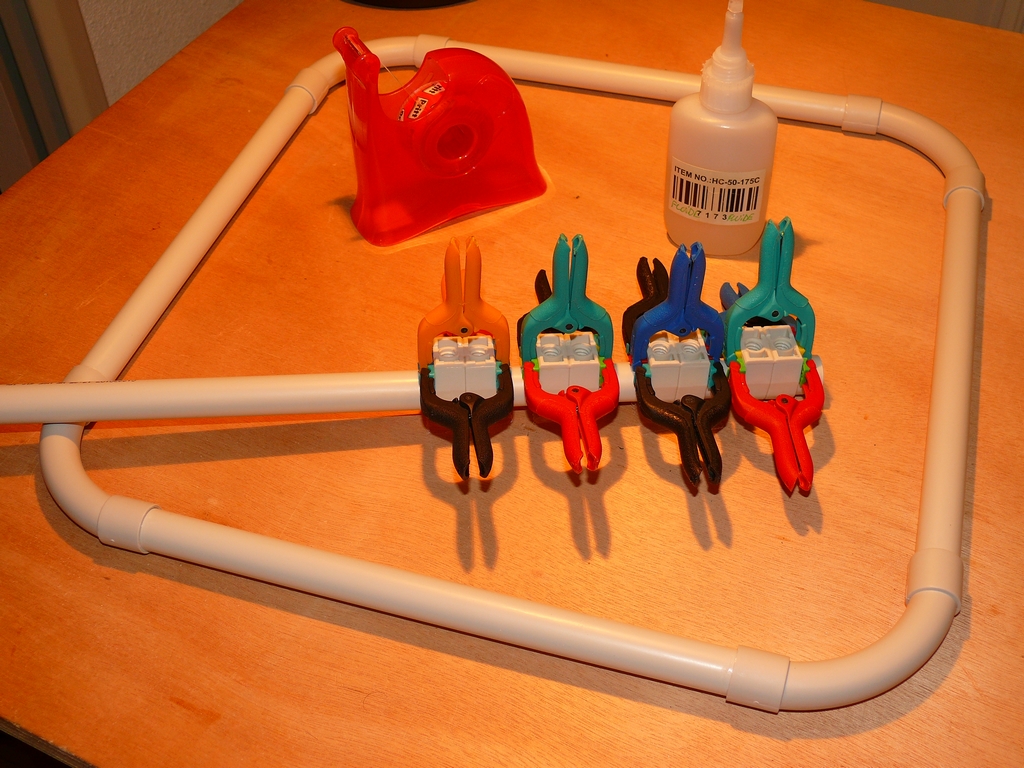
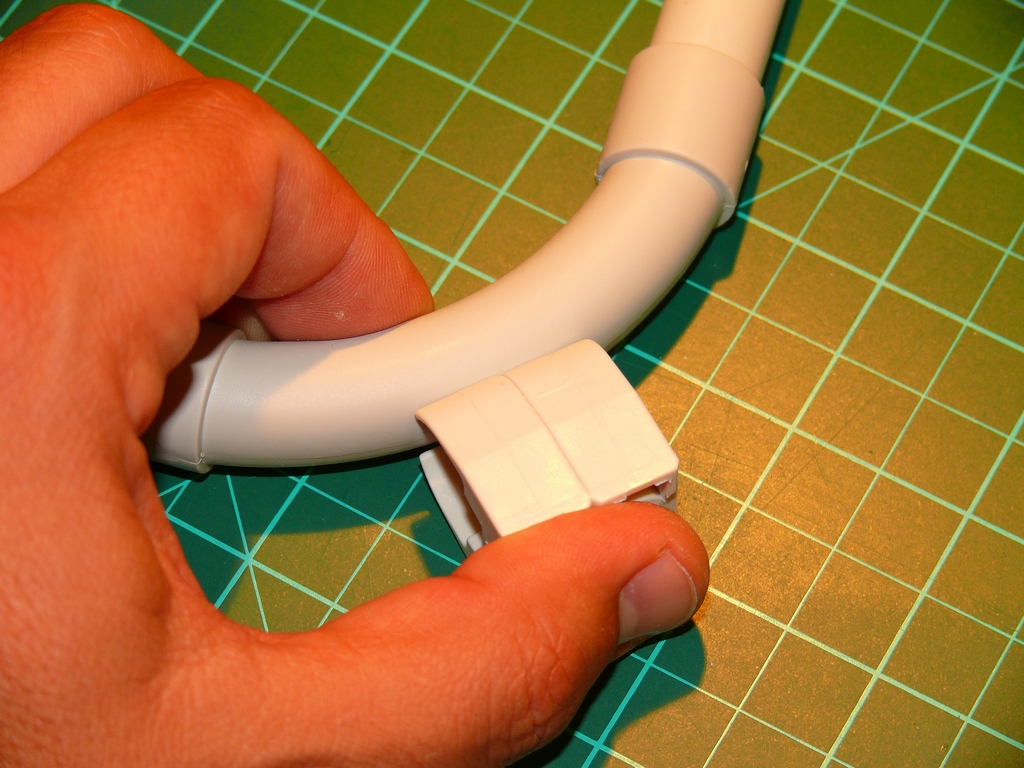
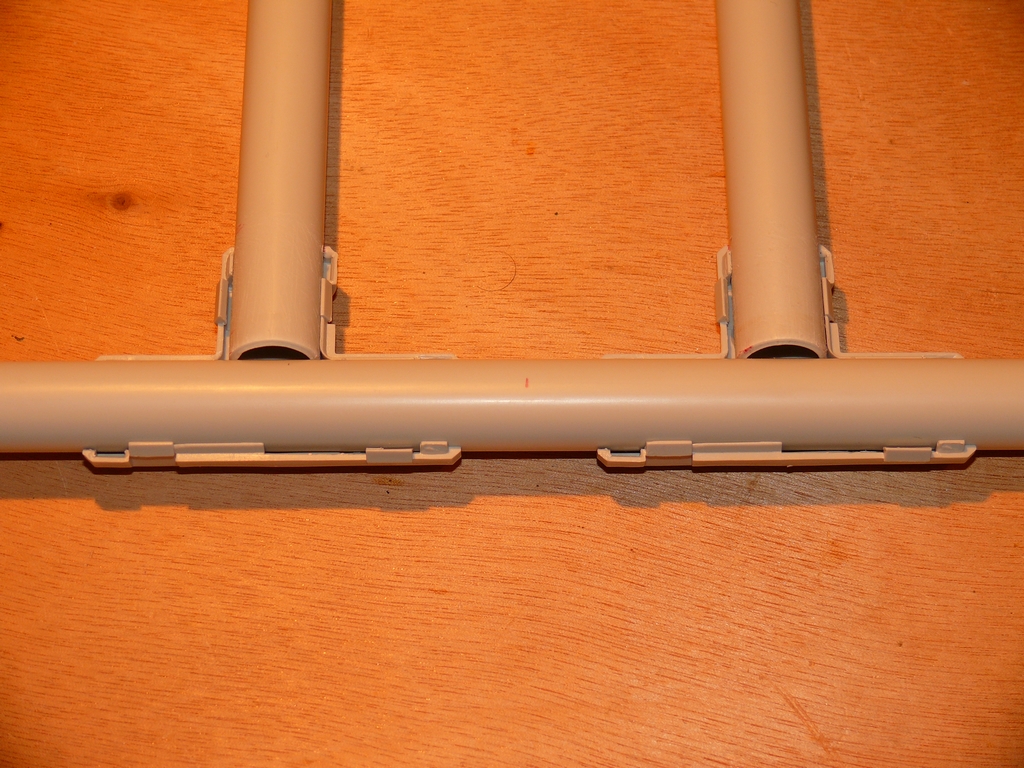
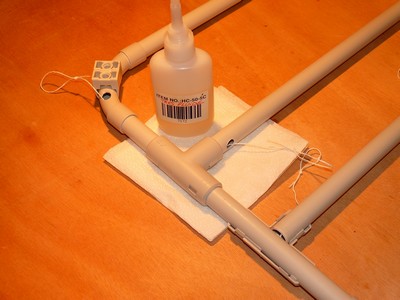
| Collage 2 par 2 des clips. Attention : Penser à
protéger le tube qui sert de guide d'alignement par du scotch
d'écolier pour éviter l'adhérence des clips
sur le tube. |
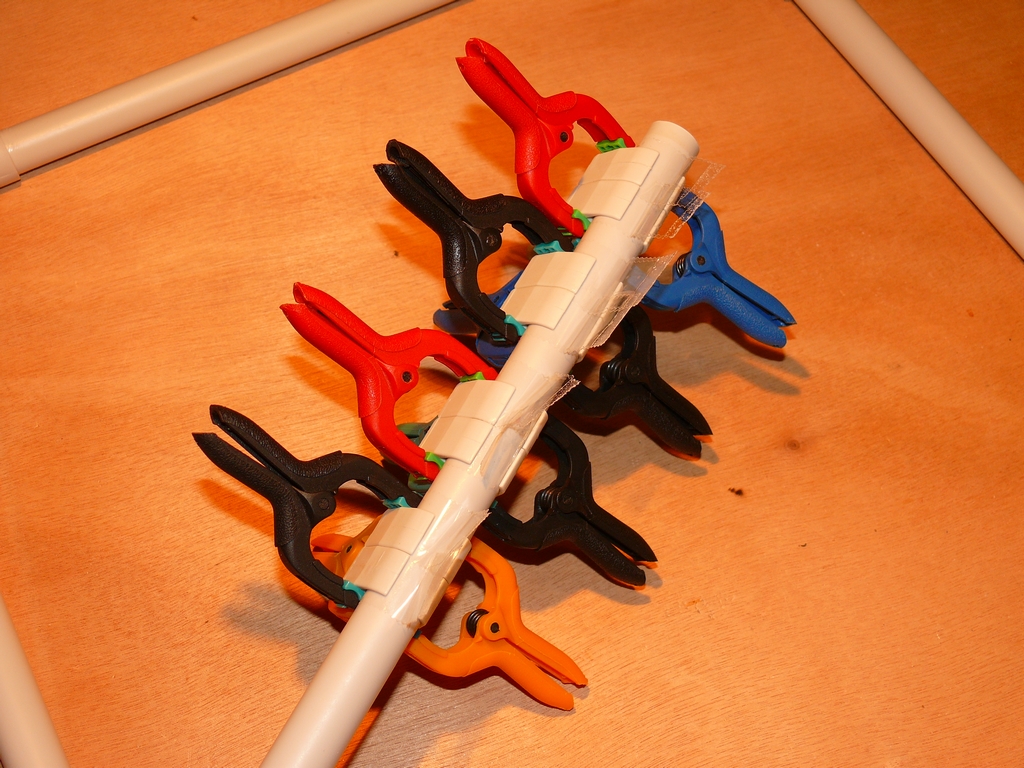
Idem, vu de dessous avec les morceaux de scotch anti-adhérence.
|
 |
 |
Les 4 paires de clips assemblés.
|
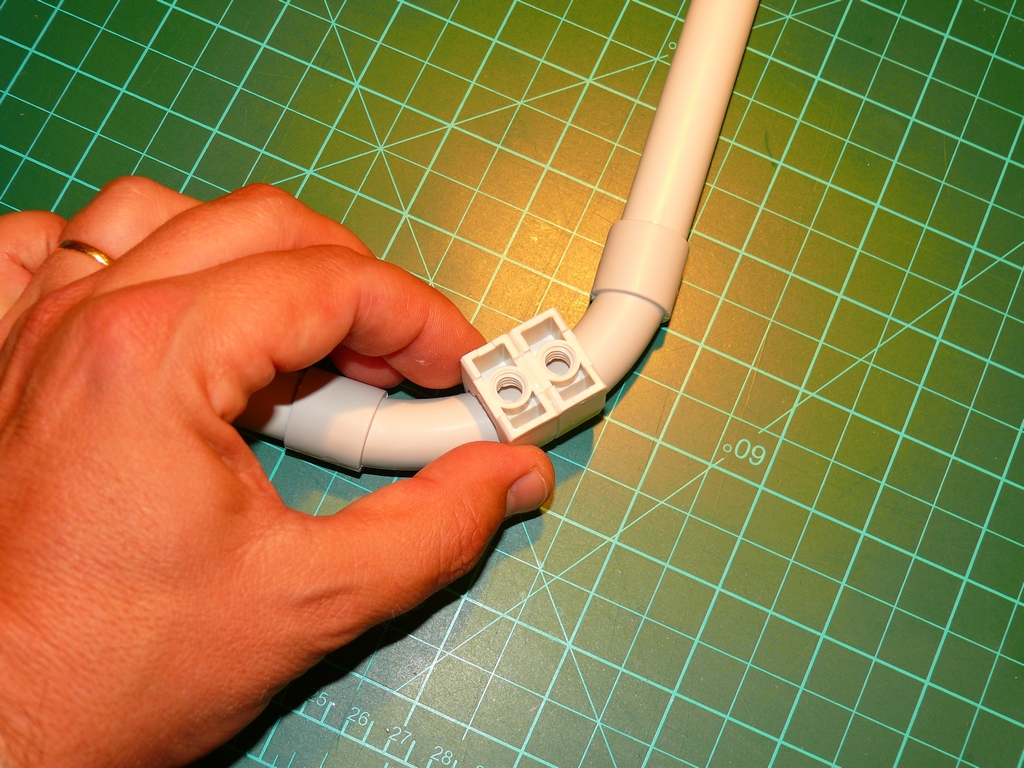
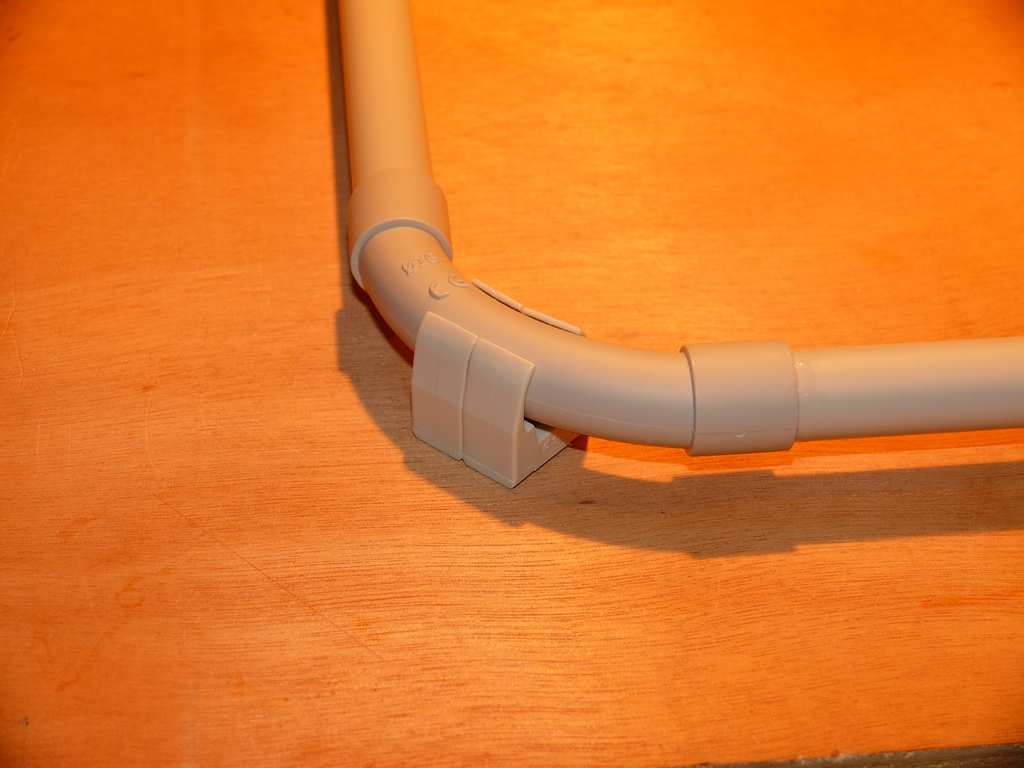
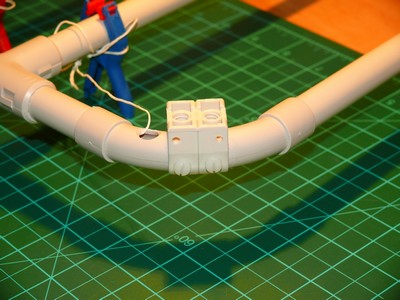
Mise en place des clips sur les coudes grand rayon. |
 |
 |
| Clip... clipsé ! |
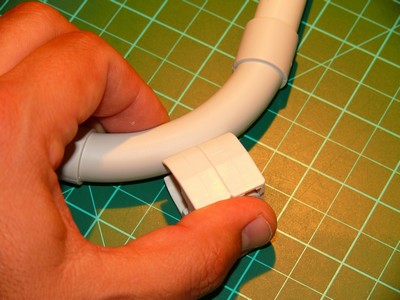
Rotation verticale du clip support moteur. |
 |
 |
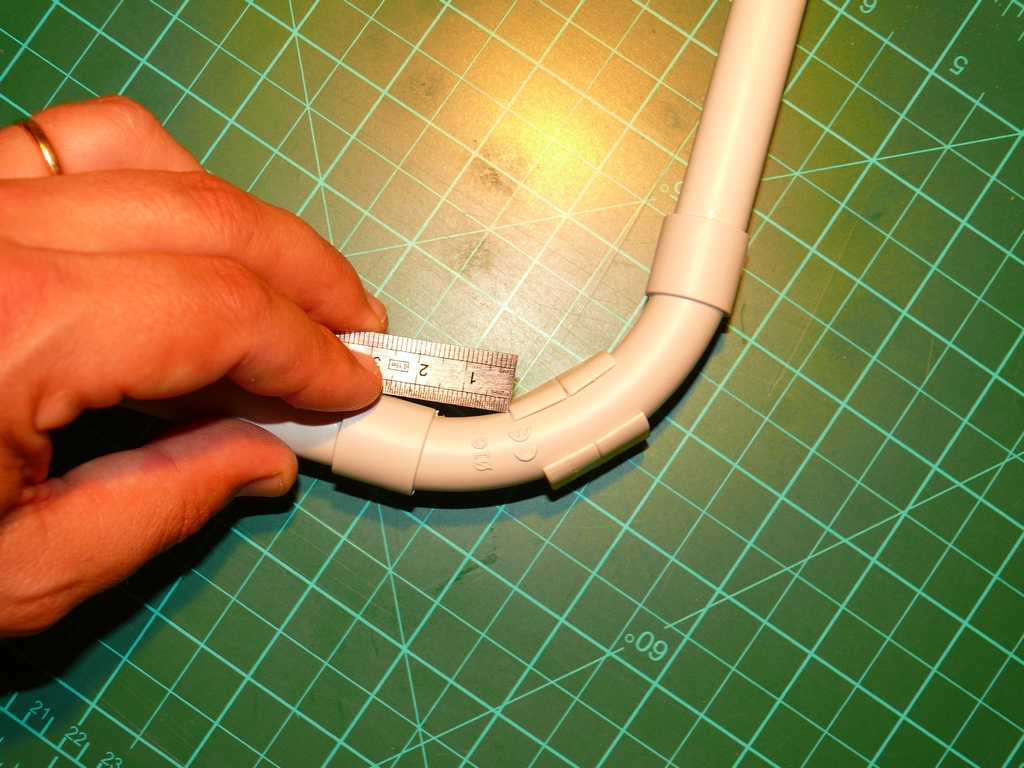
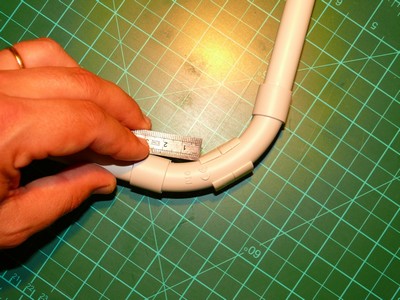
| Vérification de l'équidistance. |
Pour une parfaite horizontalité des 4 supports
moteurs, et donc par la suite des hélices, il suffit de retourner
le châssis sur une surface plane, facile non ? |
 |
 |
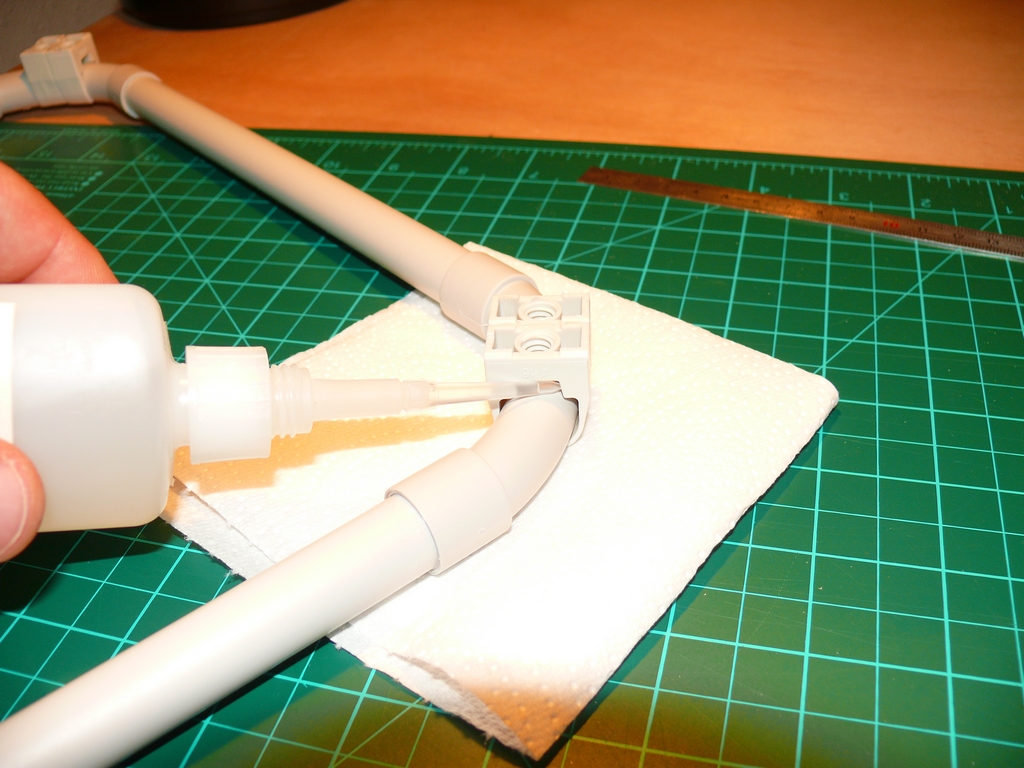
| Un clip support bien à plat. |
Petite goutte de cyano fluide pour bloquer en rotation. |
 |
 |
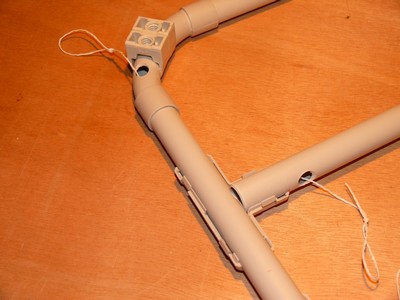
| Positionnement d'1 té avec tube de 328 mm. |
Idem pour les 3 autres. |
 |
 |
| Prévoir l'écartement des 2 tubes en fonction
de la taille de la carte de stabilisation (mesurée en diagonale
pour une carte KK dans mon cas, soit 70 mm intérieur,
105 mm extérieur). |
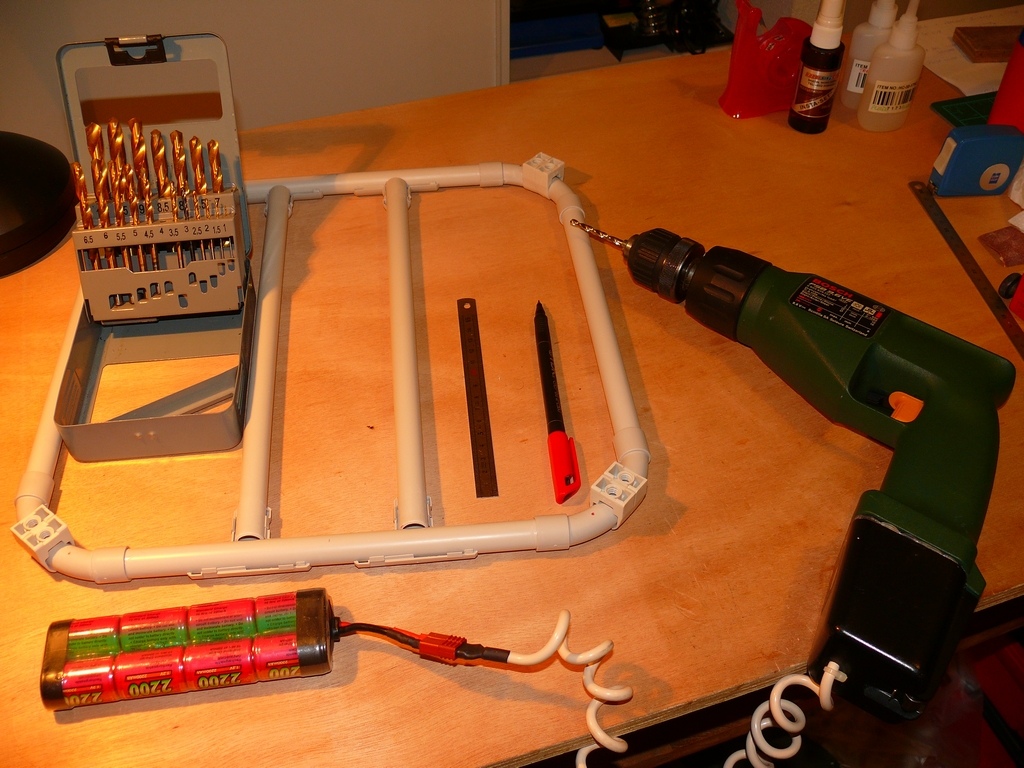
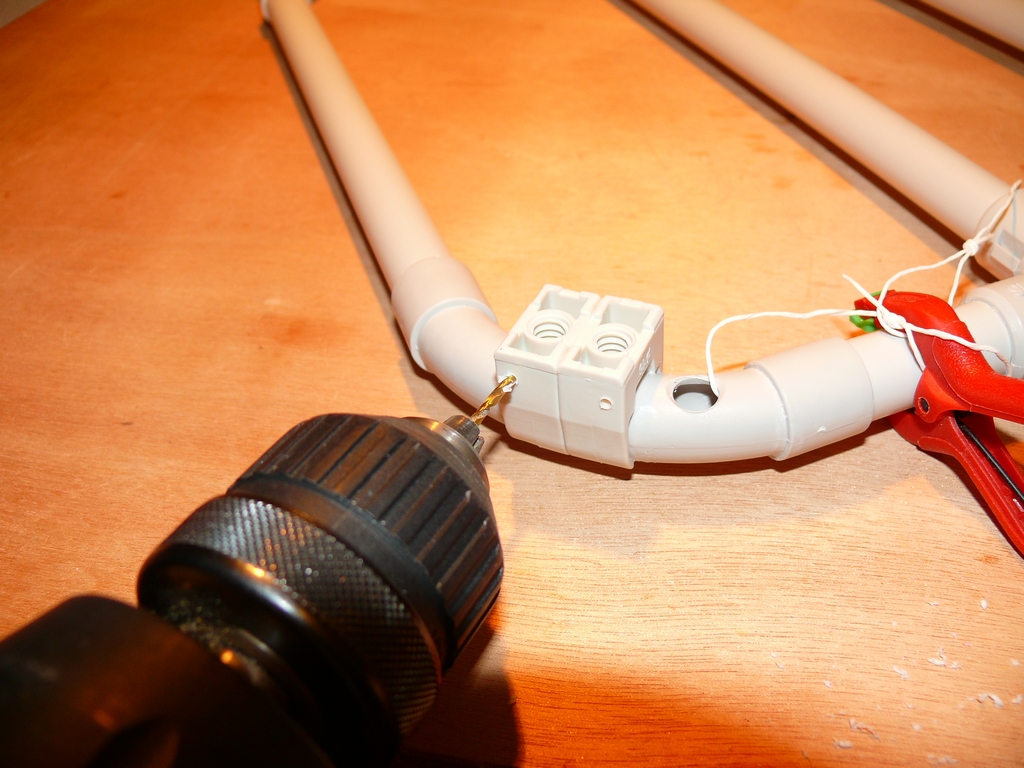
On sort la perceuse et les mèches à métaux. |
 |
 |
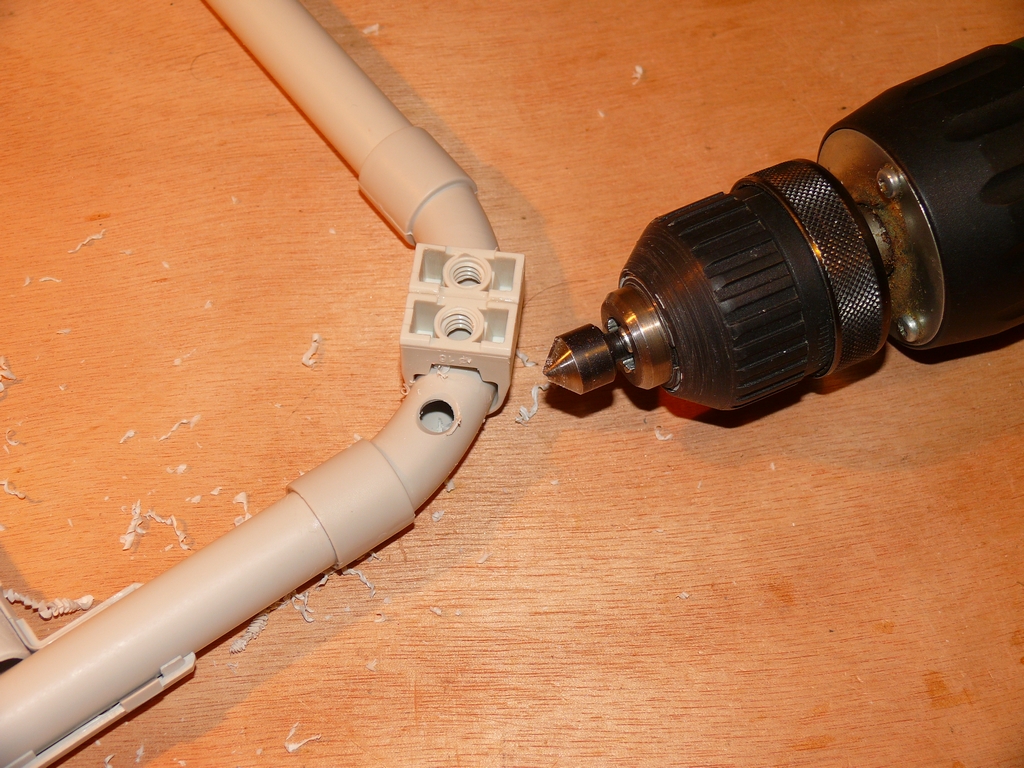
| Perçage des 4 trous diamètre 8 mm de sorties
des 3 fils d'alimentation des moteurs. |
Petit coup de chanfrein, pour les puristes ! |
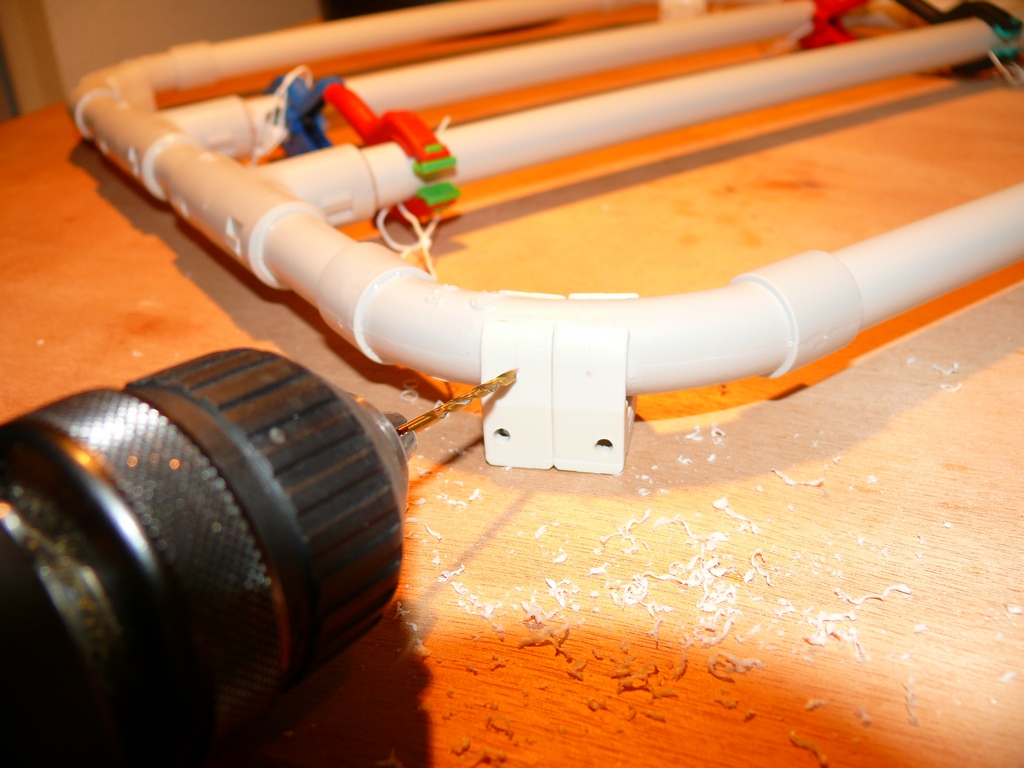
 |
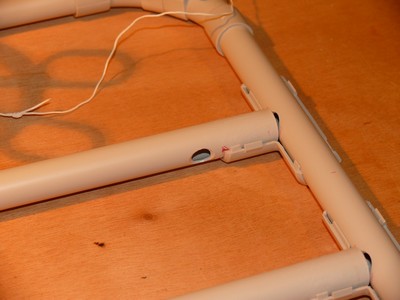 |
| Perçage des 4 trous diamètre 8 mm de sorties
des fils moteurs vers les 2 tubes de 328 mm. |
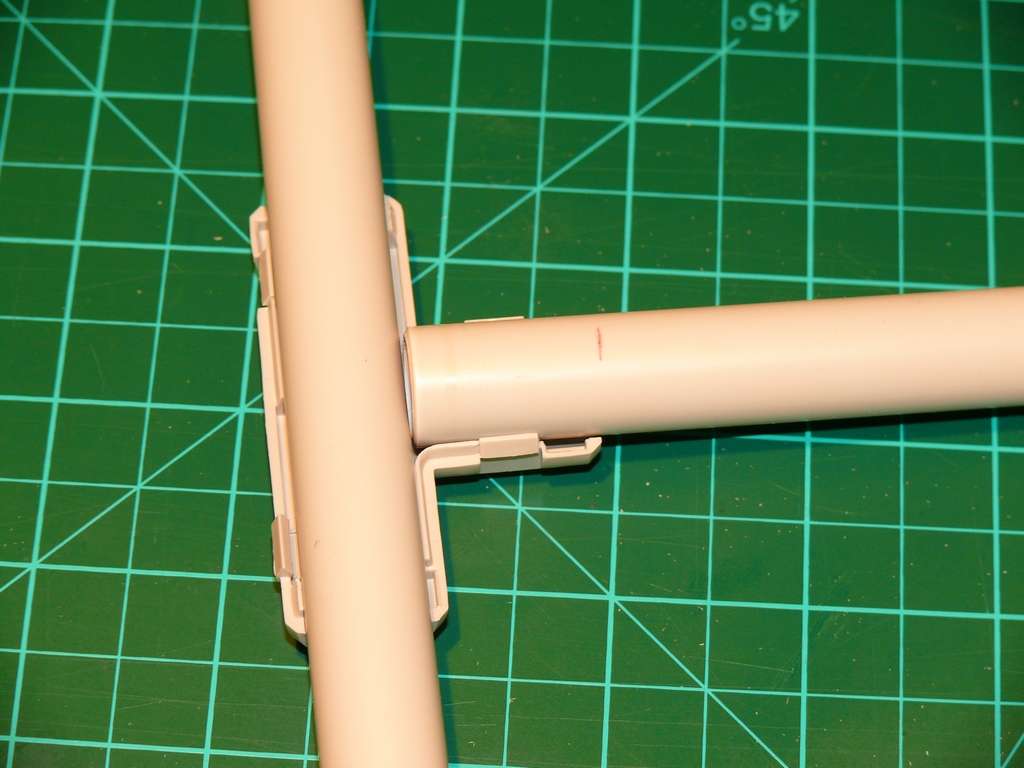
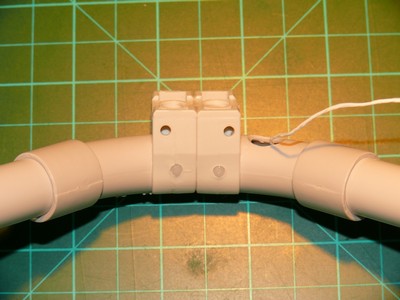
On repositionne les ½ tés et les tubes
de 328 mm en face des trous. |
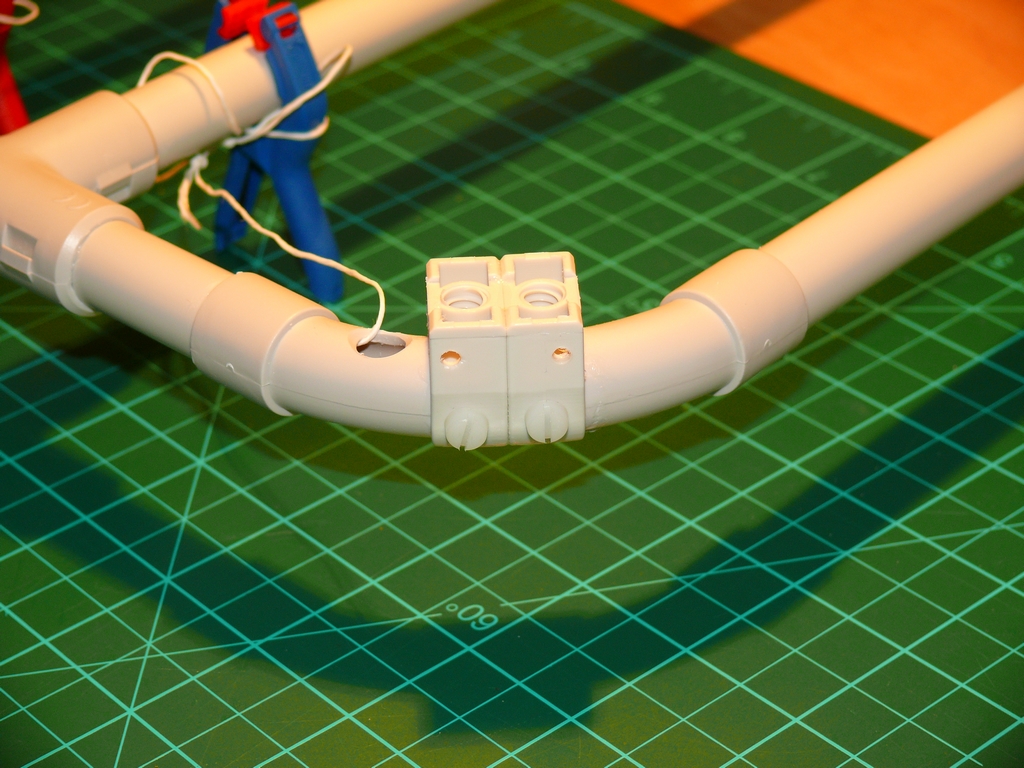
 |
 |
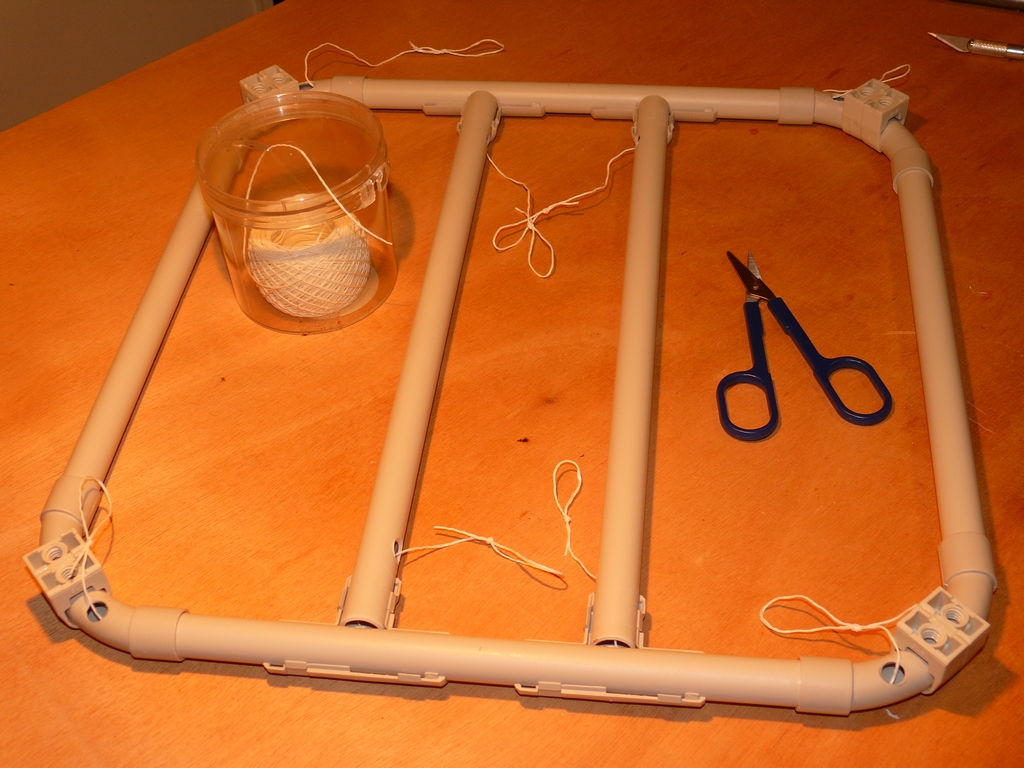
| Ne surtout pas oublier à ce stade les bouts de
ficelle pour tirer les fils par la suite, sinon grosses galères
en perspective après collage ! |
La ficelle à rôtis est en place... Héhéhé...
! |
 |
 |
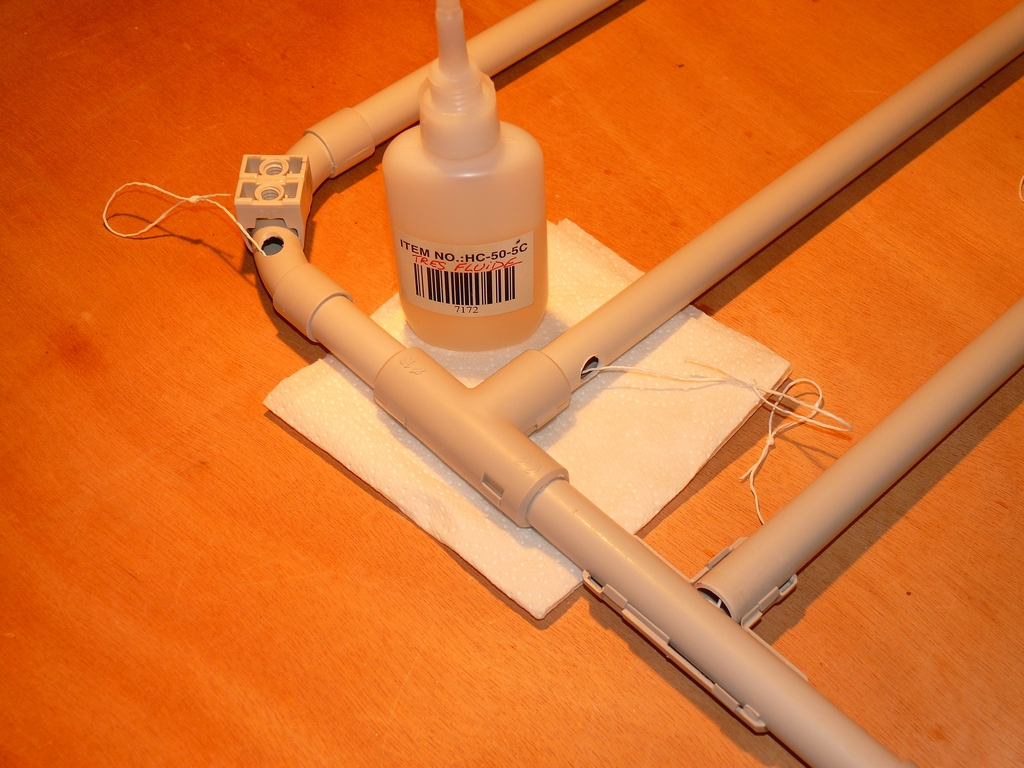
| Collage des 2 tubes de 328 mm et des 8 ½ tés. |
Séquence séchage sous pinces. |
 |
 |
| On positionne les bâtis moteurs pour mesurer et
pointer l'écartement des trous de fixation. |
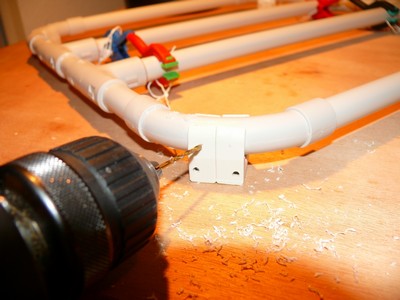
Perçage diamètre 3 mm de 4 trous par clips
supports moteurs. |
 |
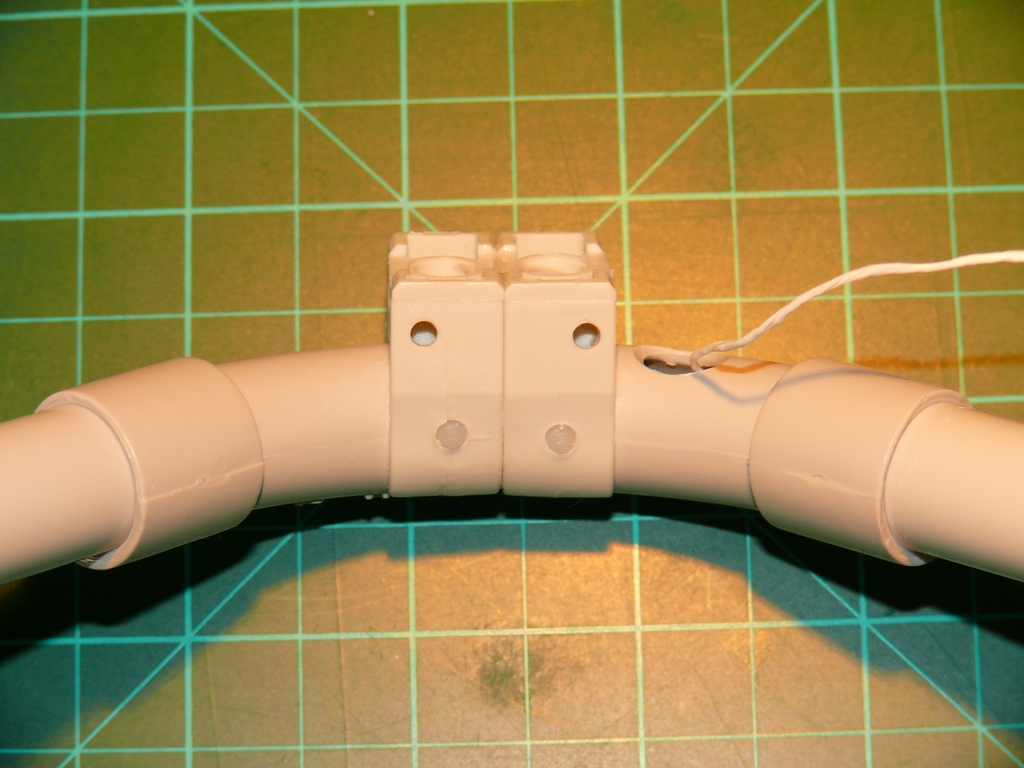
 |
| Perçage diamètre 3 mm de part en part des
supports et du tube. |
Taraudage avec une vis métallique. |
 |
 |
| Goupilles en vis nylon pour bloquer en rotation. |
Les vis nylon sont traversantes. |
 |
 |
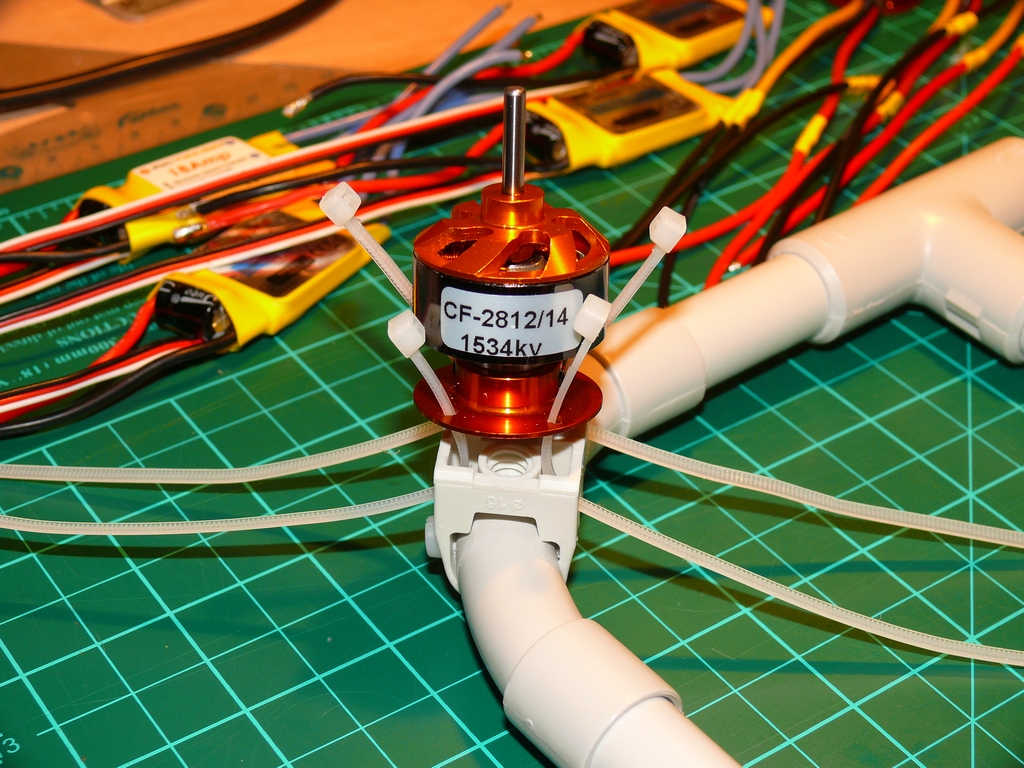
| Des petites rallonges (16 ou 18 AWG silicone) sont soudées
sur les fils moteurs et tirées à l'intérieur
du tube par les ficelles restées en attente. |
Les moteurs (RC-Timer 2812/14 kV1534) sont fixés
à l'aide de colliers Rilsan de 3 mm. Attention à ne
pas utiliser de colliers bas de gamme, trop fragiles et cassants.
|
 |
 |
| Petit détail important, les 2 vis
BTR qui bloquent les moteurs sur leurs bâtis en aluminium
anodisé ont tendance à se desserrer. A sécuriser
avec une goutte de frein filet ou de cyano. |
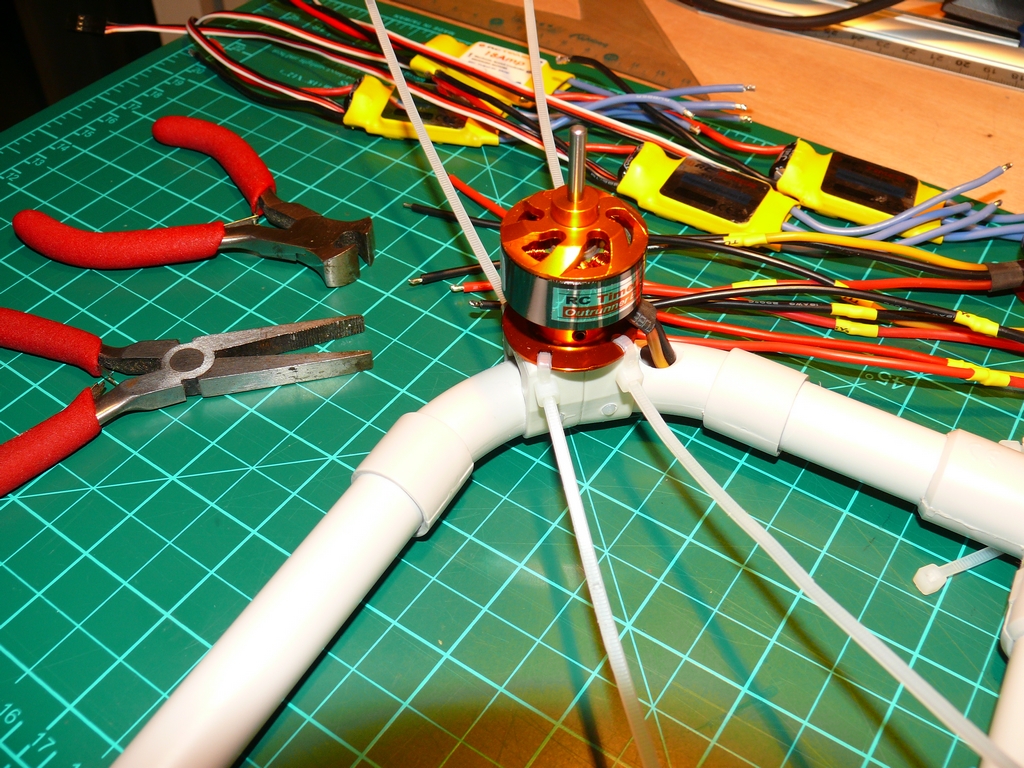
Serrage des colliers Rilsan. Ils serviront de fusible
en cas de "touchette" plus ou moins virile... |
 |
 |
| Les 4 moteurs sont fixés, les rallonges sont en
attente de soudures aux contrôleurs. |
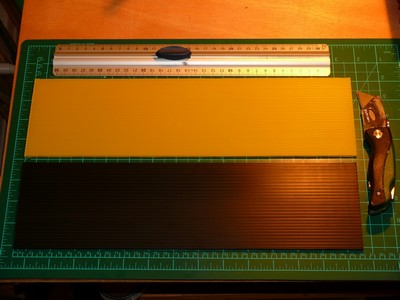
Préparation de 2 plaques de Coroplast (plastique
alvéolaire) pour rester dans le "full" plastoc
! |
 |
 |
| Découpes pour ajuster les 2 plaques de Coroplast. |
Collage au pistolet à colle chaude de la plaque
inférieure. |
 |
 |
| Colle chaude refroidie... Ça tient. |
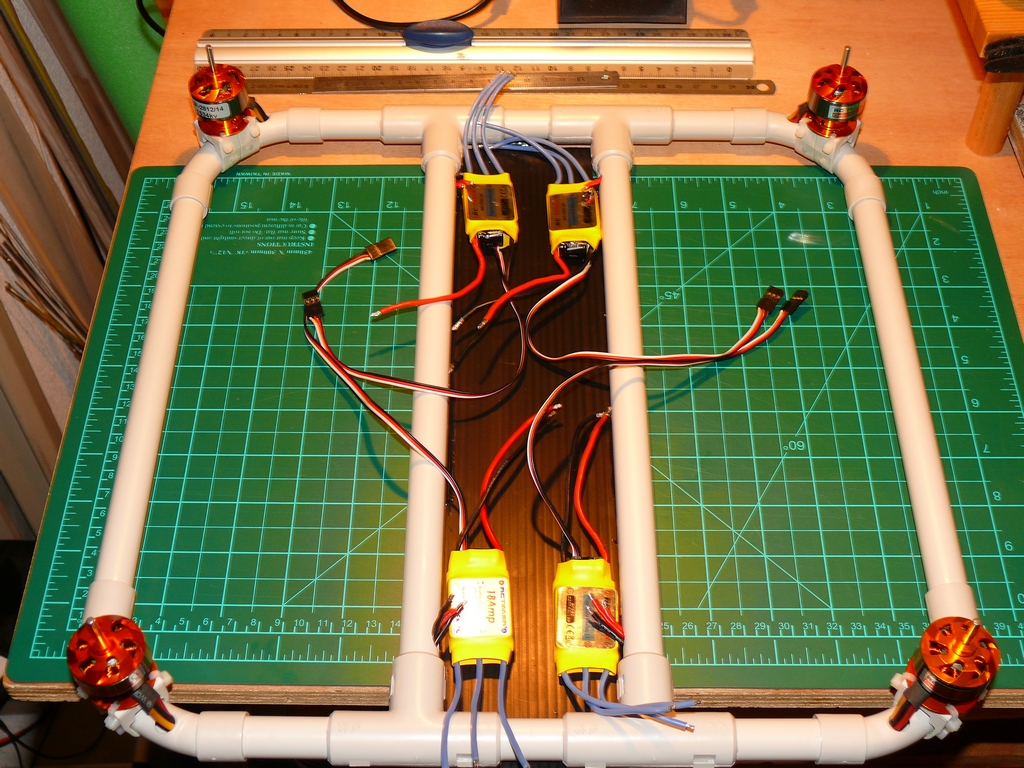
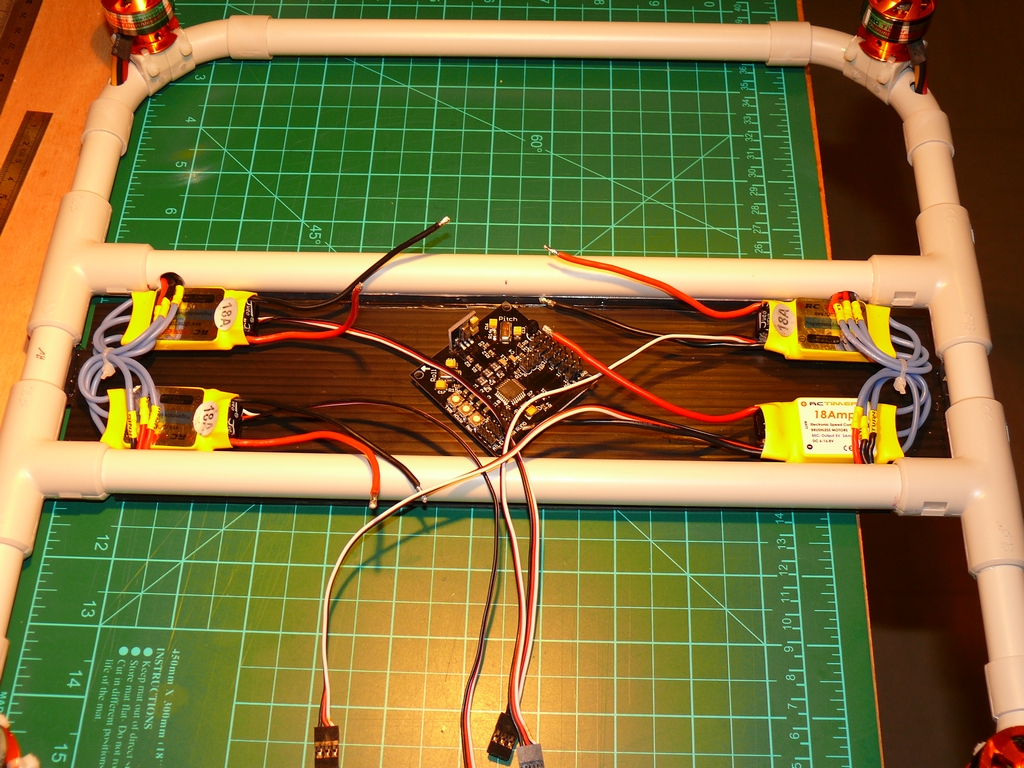
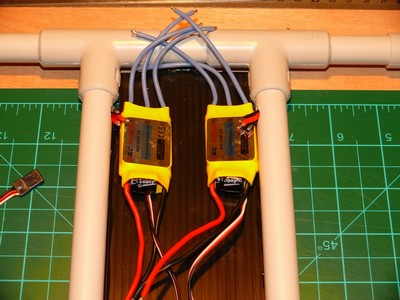
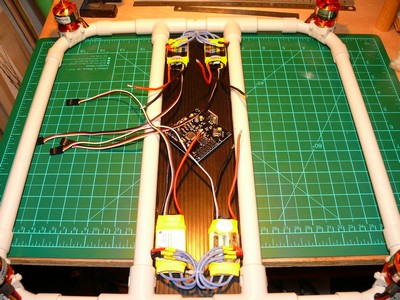
Positionnement des 4 contrôleurs (20 A c'est bien,
j'en avais 4 de dispos en RC-Timer 18 A, ça a fait l'affaire). |
 |
 |
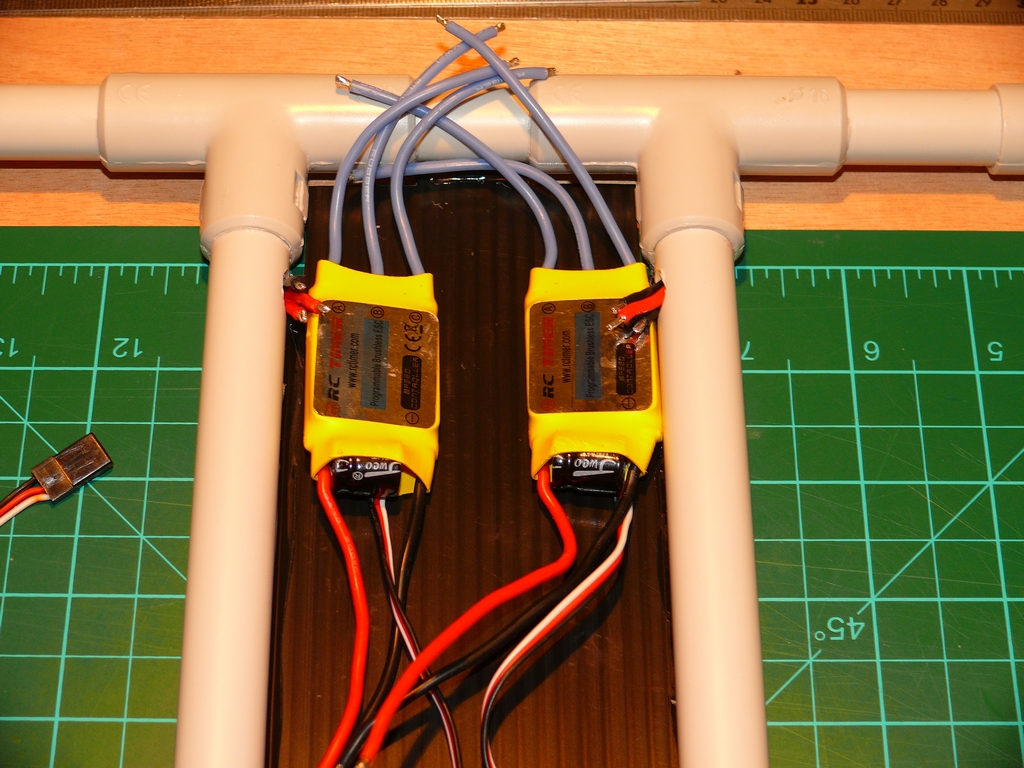
| Gros plan sur les contrôleurs. |
Soudures des contrôleurs. Vérifier les sens
de rotation des moteurs en fonction de votre carte ou module de
stabilisation. |
 |
 |
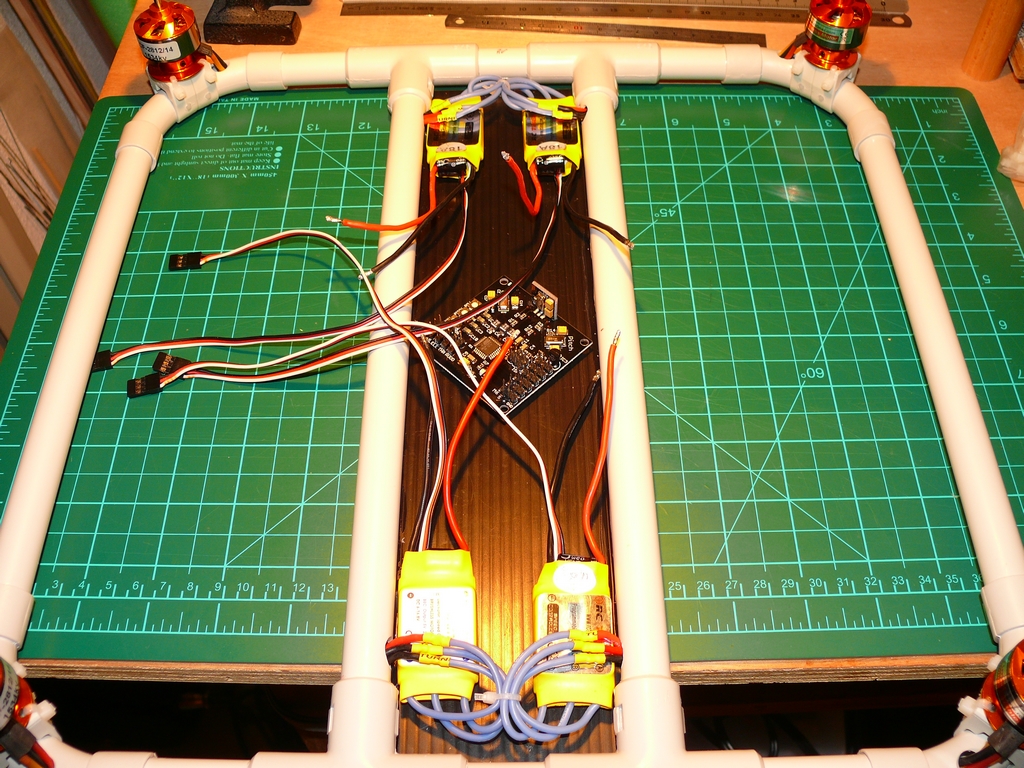
| Fixation de la carte KK V5.5 avec mousse double face.
L'Atmel de la carte KK a été reflashé avec
la version V4.7 acro. |
Carte KK positionnée bien au centre de gravité,
c'est mieux... |
 |
 |
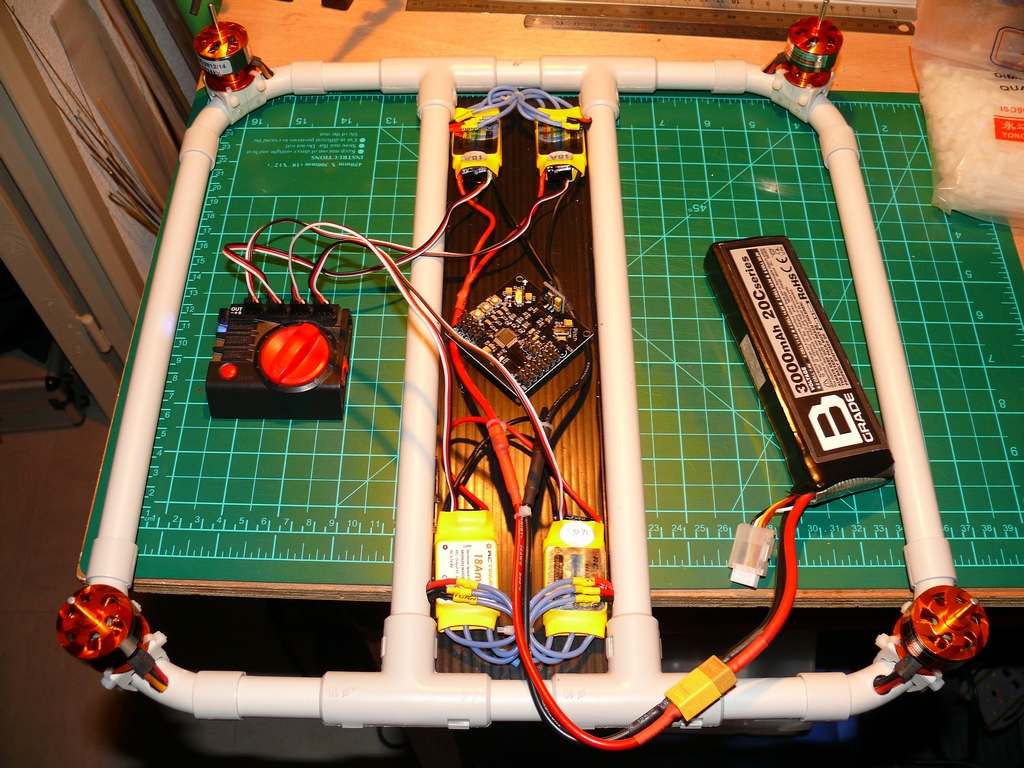
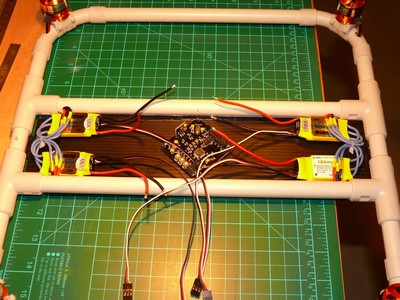
| Soudure des fils d'alimentation des contrôleurs
(+ avec + et - avec -) et d'une prise XT60 pour raccorder l'accu.
Vérification des sens de rotations des moteurs. |
Découpe d'une trappe de visite de la KK dans la
plaque supérieure et fixation avec 6 colliers Rilsan. |
 |
 |
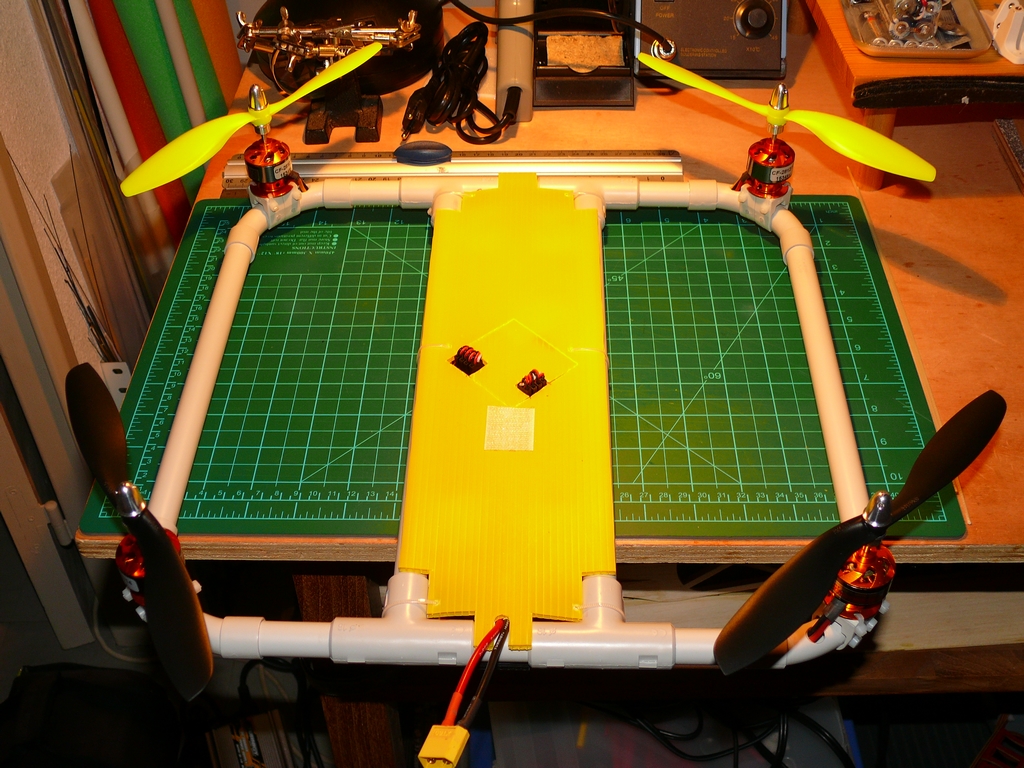
| Etalonnage des courses des contrôleurs, raccordement
du récepteur 4 voies Assan 2.4 GHz. Fixation des 4 hélices
8"x4,5" cw et ccw... C'est terminé... |
Ben non, pas tout à fait, il lui manque une paire
de pompes ! |
 |
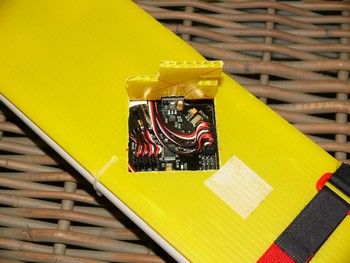 |
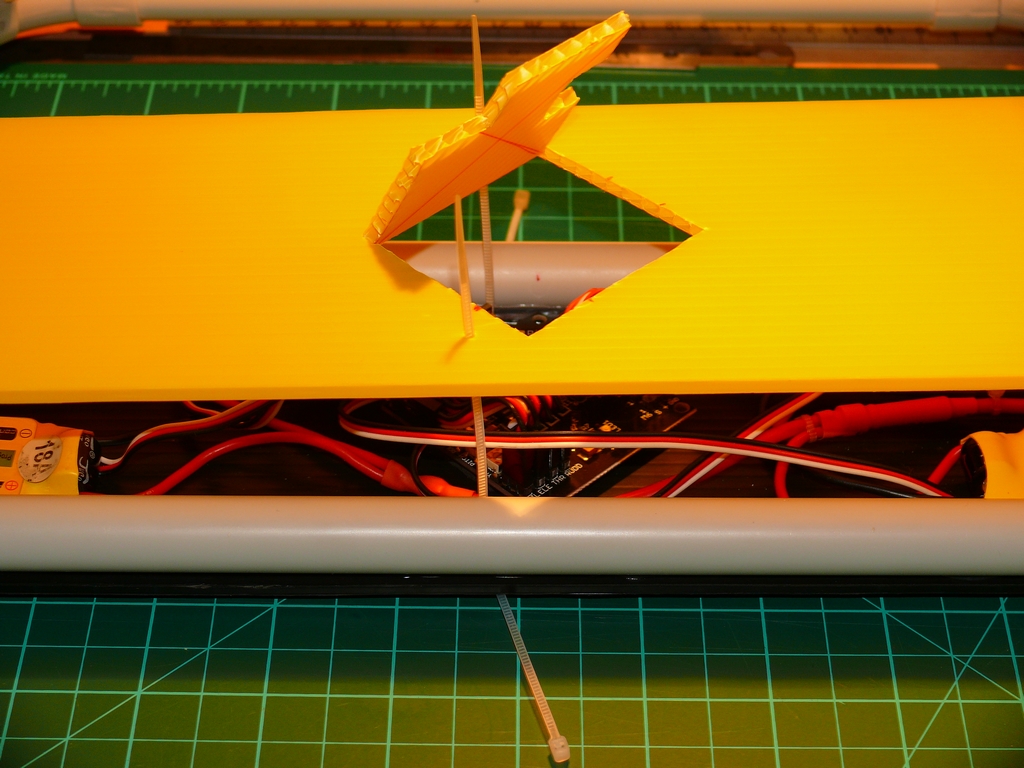
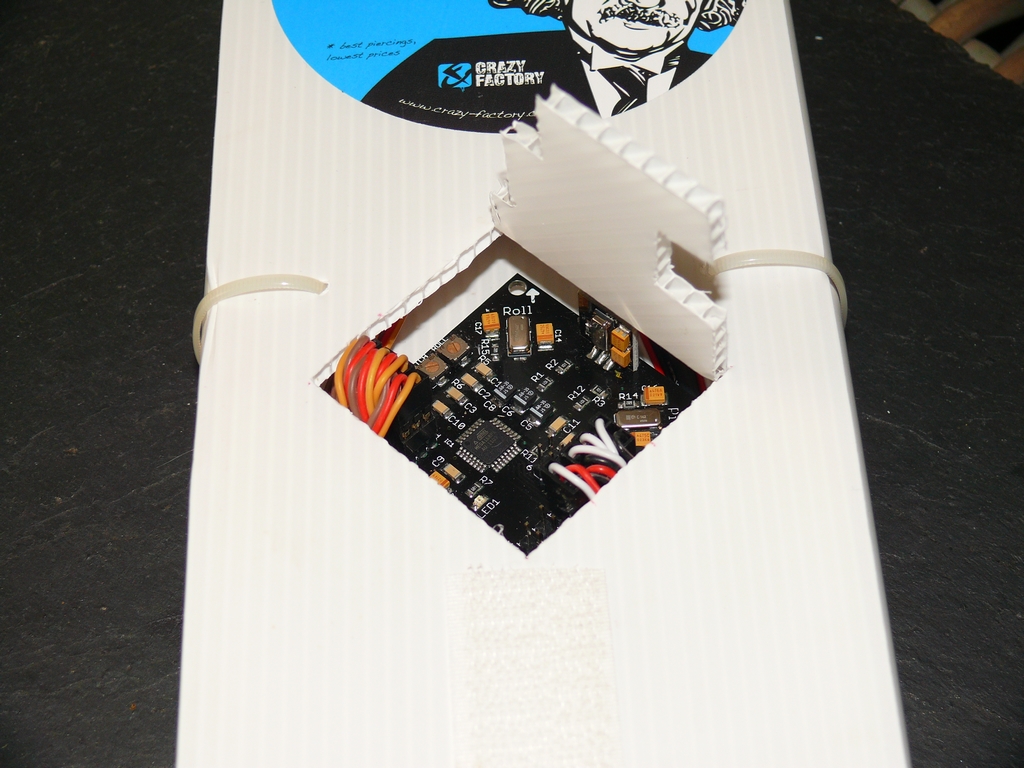
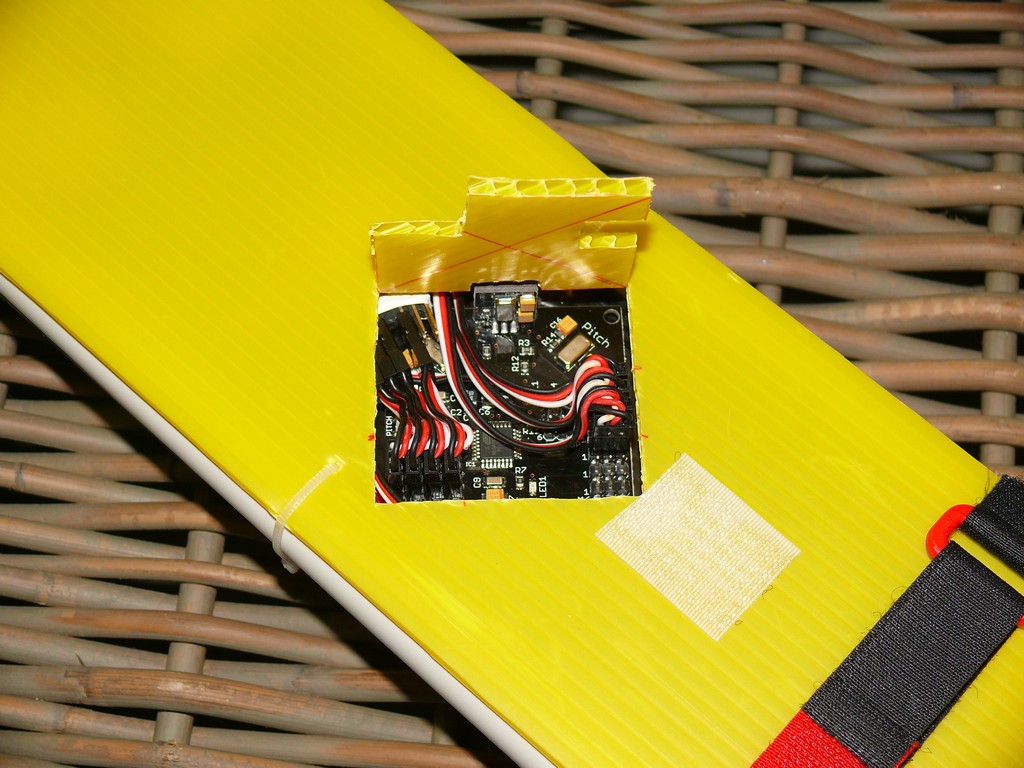
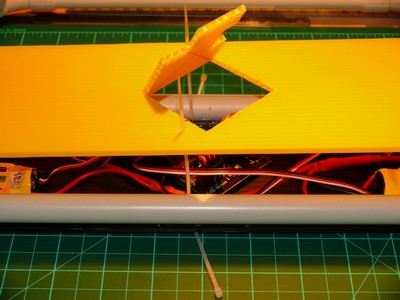
Une découpe propre
premet l'accès à la carte électronique bien
protégrée au centre du châssis. |
 |
 |
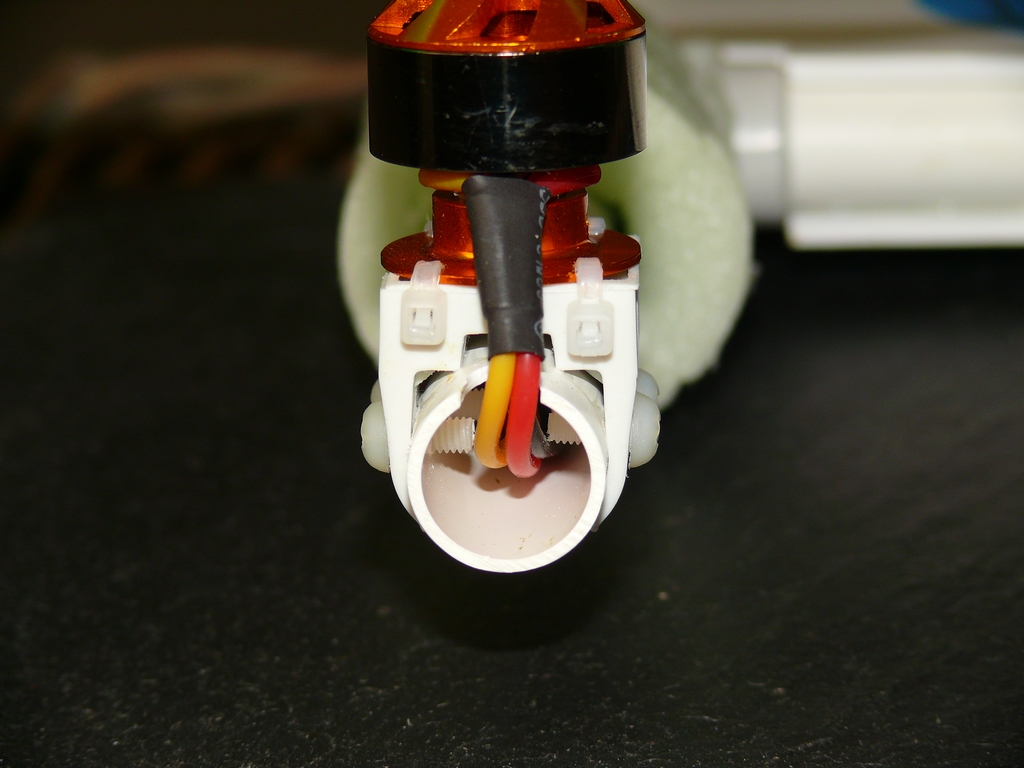
La saignée en bout
de tube permet de passer le câblage qui ne sera pas abîmé
en cas de choc latéral. |
 |
 |
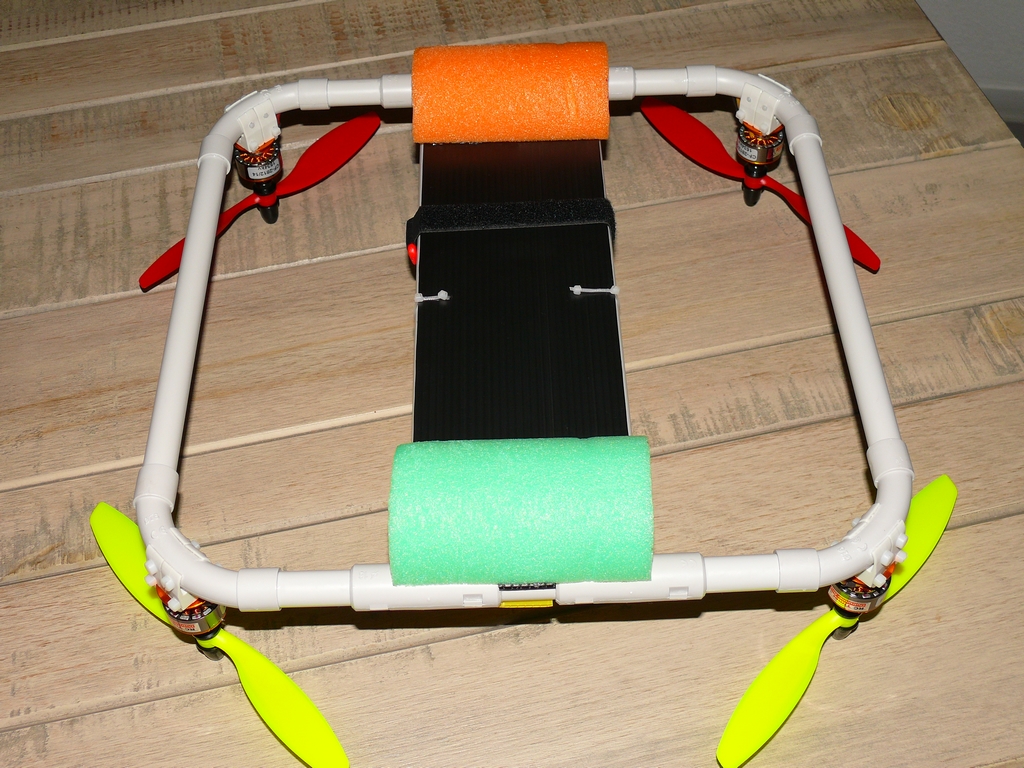
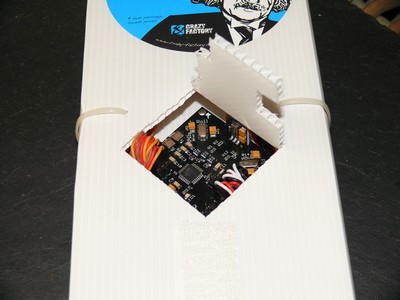
Le couvercle en Coroplast est
maintenu sur les tubes à l'aide de colliers Rylsan. |
 |
 |
2 morceaux de frites
de piscine, par exemple, collés à la colle chaude.
Un bout de scotch armé collé par dessus permettra
de faire de jolies glissades ou des touch and go sans les arracher...
(voir vidéo...) |
Equipements
et liens |
Le grand "H" :
|
 |
| |
|
Le petit "O" :
|
 |
Bien entendu ces équipements sont mentionnés
à titre indicatif et d'autres configurations équivalentes
ou plus performantes peuvent parfaitement fonctionner.
L'équipement du grand "H" peut être utilisé
sans aucun problème sur le petit "O", mais éviter
l'inverse.
Les contrôleurs RC-Ttimer conseillés sont
flashés d'origine avec le firmware SimonK et ne nécessitent
aucun paramétrage mis à part le calibrage de la course
des gaz avant la première utilisation. Leur fréquence
de fonctionnement est élevée, la courbe de gaz est parfaitement
linéaire, ils sont optimisés pour les multicoptères.
Mais là aussi pas d'inquiétude, la série Super
Simple de chez HobbyKing, par exemple, fait également l'affaire.
Les masses en ordre de vol, sans accus, sont de 680 et 810 g.
Alimentation en Lipo 3S entre 2200 et 3700 mAh mais également
en 4S LiFe 2300 mAh.
Le petit avec ses moteurs en 1534 KV peut être alimenté
en 2S en étant un peu moins vif, pour débuter par exemple.
 |
 |
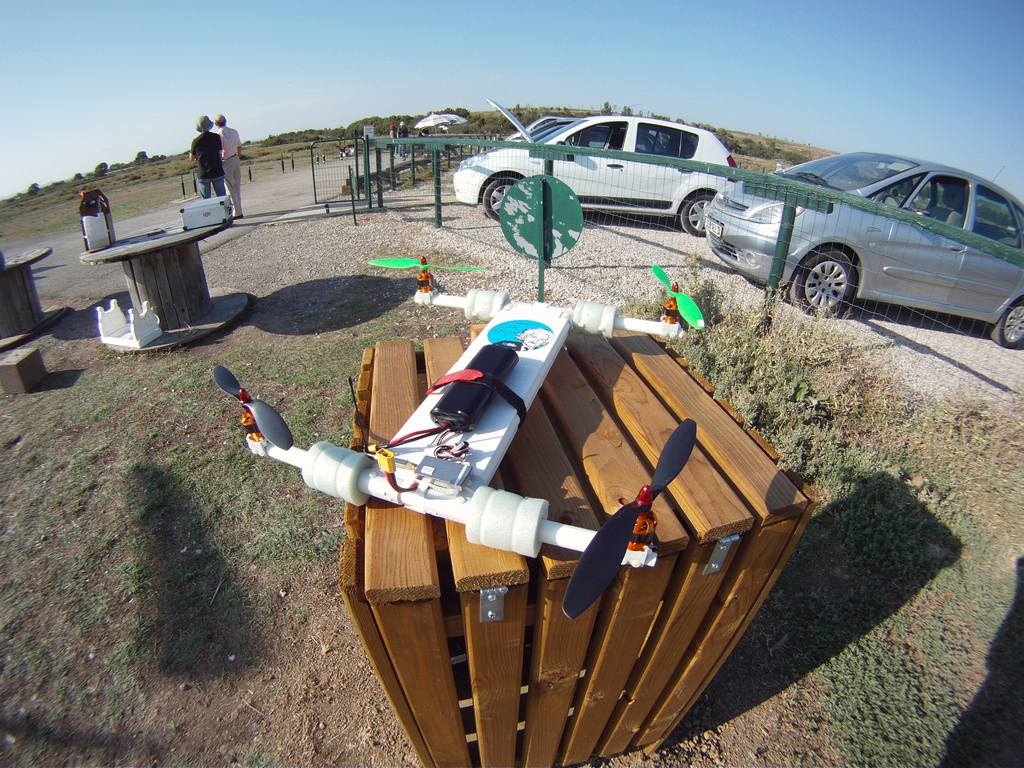
En plein air... Juste
avant de s'envoler... |
L'autonomie varie entre 6 et 12 minutes en fonction
du pack, du modèle utilisé, du matériel embarqué
et des conditions de vol (vent, vol cool ou débridé, etc.)
Toutes les cartes et modules de stabilisation peuvent
également être montés bien entendu, du plus simple
avec 3 gyroscopes au plus performant avec accéléromètres,
baromètre, sonar, GPS, etc.
A choisir en fonction de l'utilisation, du niveau de pilotage mais surtout
du budget, qui peut varier d'une dizaine à plusieurs centaines
d'euro !
Pour rester à fond dans le concept low-cost, les cartes KK me
semblent être actuellement le meilleur compromis et la mise à
jour du soft en V4.7 acro (le programmateur USBasp est à ce titre
très utile) autorise des performances bluffantes pour le prix.
Un petit tour sur le forum de modelisme.com
vous permettra d 'en savoir beaucoup plus.
En vol, le plus grand manifeste évidemment plus
d'inertie, le petit est plus vif mais les réglages de débattements
et/ou d'exponentiels peuvent calmer et adoucir gentiment tout ça.
Une radio-commande basique et un simple récepteur 4 voies suffisent,
aucune programmation compliquée... Le pilotage de ces drôles
d'engins est très proche de celui des hélicoptères,
sans la complexité des réglages et les risques de casses
coûteuses.
En complément d'un simulateur, c'est idéal pour débuter
dans la, ou plutôt les, voilures tournantes.
Par contre la visualisation en est plus délicate, on peut très
vite être désorienté une fois l'engin satellisé
et certains angles de vue sont plus que déroutants. On peut améliorer
pas mal cet inconvénient par l'ajout de bandes de LED alimentées
sur la prise d'équilibrage des accus, la place ne manque pas
sur les tubes. Autre astuce qui fonctionne pas mal, les hélices
en couleurs distinctes pour l'avant et l'arrière.
 |
 |
| En immersion ou simplement pour
réaliser des vidéos en vol, la caméra trouve
sa place tout à l'avant, les hélices restent en dehors
du champs. |
 |
 |
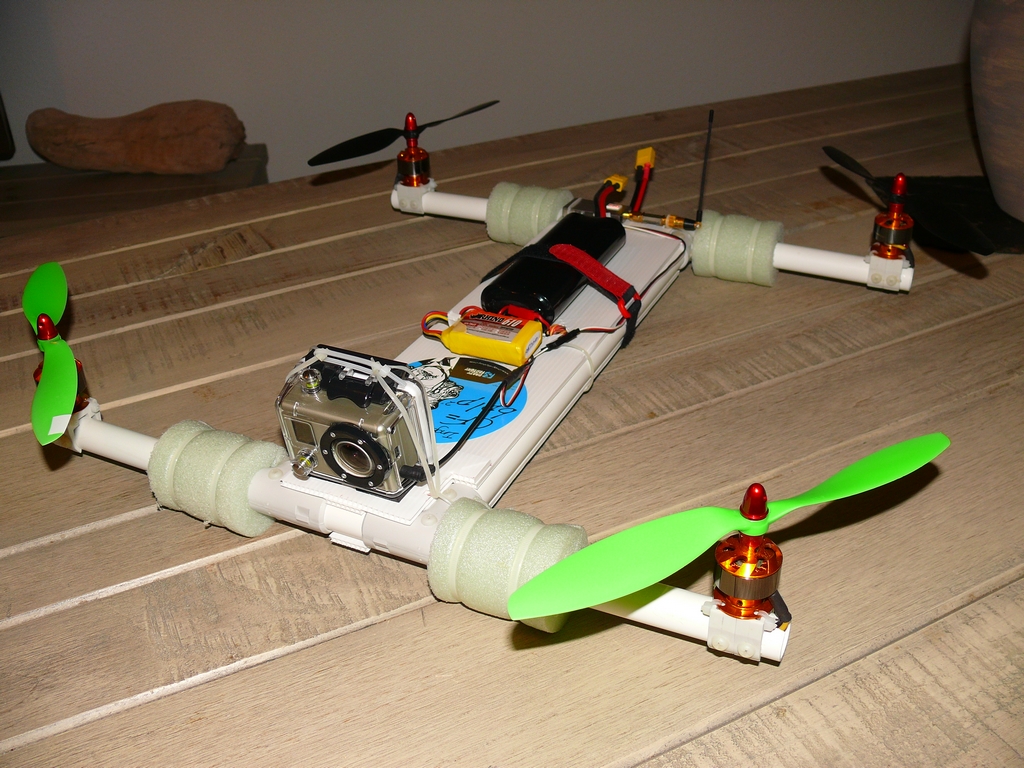
La grande surface disponible
sur le châssis permet de placer le matériel en s'arrangeant
pour conserver l'équilibrage central. |
L' utilisation en FPV est tout à fait possible
et même chaudement recommandée avec un minimum de pratique
au préalable. Ce sont de super plate-formes vidéo pour
pas trop cher...
Les vibrations visibles sur la vidéo embarquée
ci-dessus sont consécutives à la fixation par simple collage
de la Gopro avec une mousse double face sur la plaque en Coroplast.
Dans une autre séquence enregistrée en FPV la fixation
a été rigidifiée par 3 petits colliers Rilsan,
résultat, images nettes, sans vagues, impeccable ! A voir avec
d'autres sur letubedegardiolo
- youtube
Pensez quand même à équilibrer les hélices,
ça ne fait jamais de mal.
Bon, voilà, j'ai suffisamment
bossé, à vous de jouer maintenant, et surtout n'hésitez
pas à reprendre, modifier, adapter, améliorer les
idées, et détourner les matériaux...
Une petite photo et quelques lignes en
retour ne pourront que faire plaisir aux Jivaros...
Merci par avance à tous ceux qui feront suivre et bravo
à tous ceux qui ont déjà franchi le pas,
comme on peut le voir dans cette
galerie dédiée au Quadriolo. |
 |
Contacter l'auteur : gardiolo@jivaro-models.org