|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Présentation : Xavier Mangogna Ni avion, ni hélico, l’autogyre (ou autogire ou gyroplane) fut mis au point dans les années 1920 en Espagne par Juan de la Cierva. Il est encore très populaire en aviation grandeur si on en juge par le nombre important d’articles et de vidéos qui lui sont consacrés sur la Toile. L’intérêt de la formule : un autogyre ne décroche pas et peut se poser dans un mouchoir. A l’époque c’était révolutionnaire. Puis est apparu l’hélicoptère de plus en plus fiable qui l’a supplanté : un autogyre ne peut pas décoller à la verticale, son rotor n’est pas entraîné par le moteur (encore que certains disposent d’un pas collectif et bondissent au décollage avant de poursuivre en translation). Dans les années 50, il fit un retour remarqué
(avec Igor
Bensen) car il permettait de voler à peu de frais dans
de bonnes conditions de sécurité. Il en existe des bipales,
tripales, à moteur propulsif ou tractif, parfois de simples
assemblages de poutrelles d’alu ou tout en composites avec cabine
chauffée et tableau de bord ultra moderne. Ma préférence
va à Ken Wallis (95 ans), pilote et constructeur de l’engin
vu dans un James Bond. Le (presque) centenaire pilote
toujours ses autogyres en lâchant les commandes pour faire
coucou à la caméra, histoire de tordre le cou à
la réputation (injustifiée ?) de dangerosité
ou d’instabilité de ces engins. Premiers pas
J’ai alors cherché des photos du Rotorshape, le modèle de début de chez LA Heli, qui utilise les mêmes composants que le Cierva. Un tube carbone, un peu de balsa, et je réalisais une copie de Rotorshape. Et là, ça a volé du premier coup. Je ne m’explique pas cette réussite autrement que par un réglage plus soigné. Voici une petite vidéo réalisée par vent nul : On voit bien que c’est un modèle très
gentil et facile à piloter.
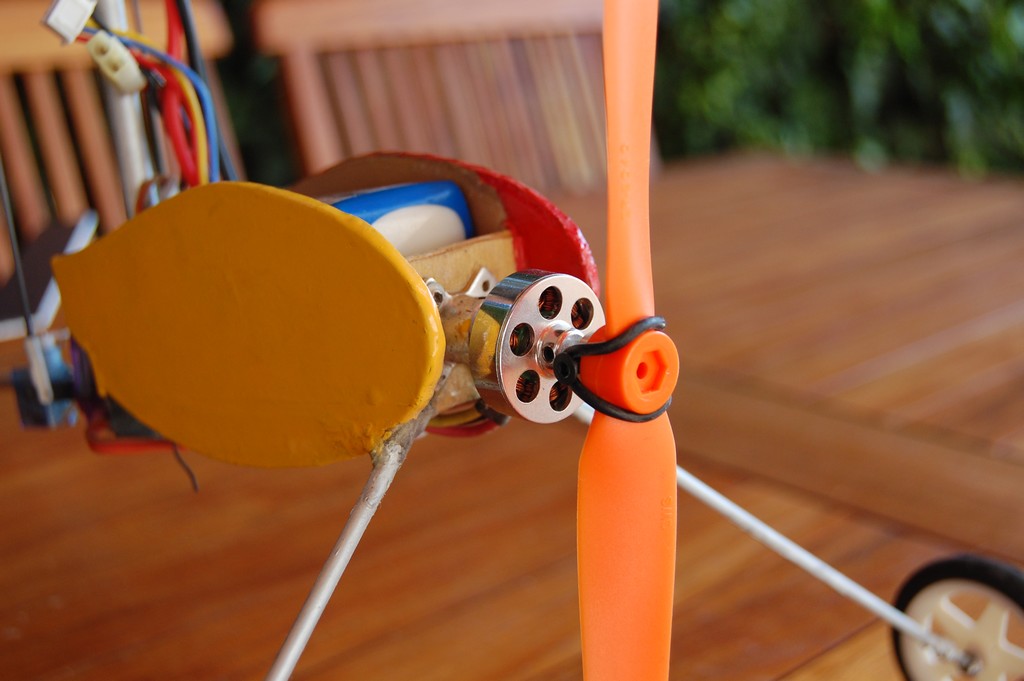
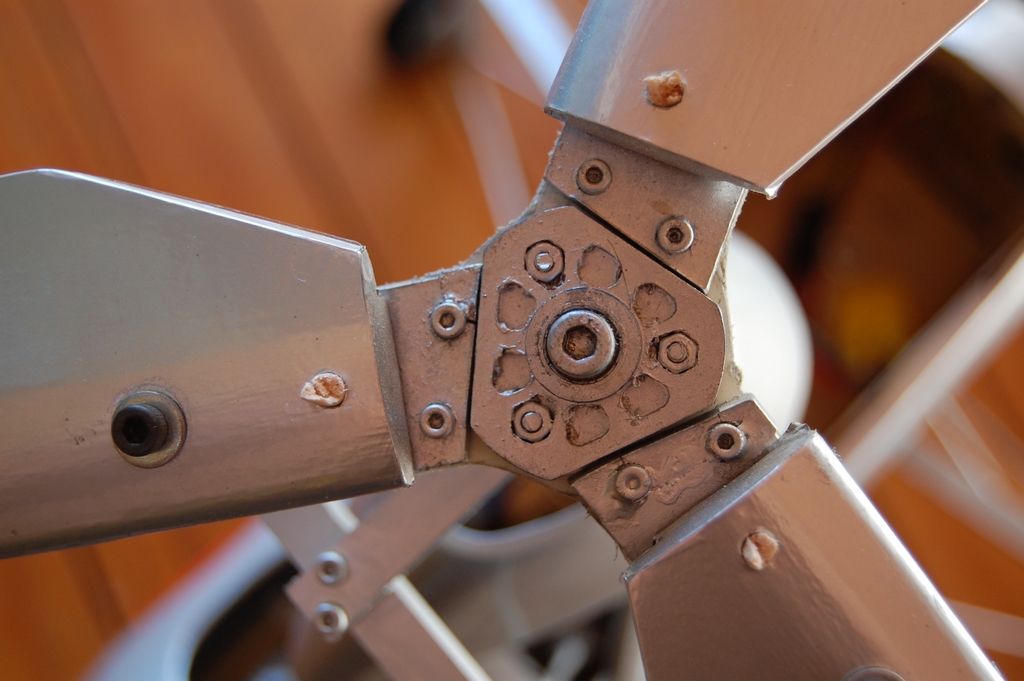
Avec le rapporteur, on se constitue un jeu de cales en carton pour mesurer tous ces angles. Inutile de centrer trop avant sinon le rotor est trop cabré pour voler en palier, ça freine. Trop arrière et l’autogire se retrouve dans la situation décrite plus haut, l’engin part en boucle si on le lance un peu trop fort et c’est fini. On peut monter un volet de dérive mobile très efficace pour tourner, le mien était un peu petit au départ. Notez la forme de la tête de rotor : elle est bien plus simple que celle d’un hélico et pourtant là aussi le pas des pales varie automatiquement pour équilibrer la portance : une pale qui avance ajoute à sa vitesse de rotation la vitesse de déplacement de l’engin, sa portance est supérieure à celle de la pale qui recule. Alors en théorie quand les pales tournent à 200 km/h et que l’autogire (ou l’hélico) vole à 100 km/h, la pale qui avance vole à 300 km/h et celle qui recule à 100 km/h. Si rien n’est fait pour compenser ce déséquilibre, le vol est impossible. Sur le rotor du fabricant tchèque, les pales sont fixées à une étoile à trois branches souple, en fibre de verre, prise en sandwich entre deux pièces de carbone. Vous noterez la découpe biaise du point de battement : elle oblige la pale qui voudrait monter (la pale avançante qui porte davantage) à réduire son incidence et la pale qui voudrait descendre (la pale reculante qui a moins de portance) à augmenter son incidence, équilibrant ainsi la portance du disque rotor. Si vous regardez un Rotorshape en vol, le rotor forme un dièdre (un cône en fait) plus accentué du côté de la pale qui avance et pourtant il vole tout droit. C’est très bien fait, léger et solide car après pas mal de plantages dus à des inversions (le sens de déplacement de l’autogyre est difficile à visualiser quand il s’éloigne), il marche encore. La fixation des pales sur le moyeu du rotor est aussi simple qu’efficace : un seul petit boulon et une goupille en balsa. En cas de choc, la goupille casse et la pale se replie instantanément sans tout exploser. Si vous souhaitez débuter en autogyre, un modèle comme le Rotorshape est tout indiqué. Il faudra un brushless de 1300 Kv (100 Watts environ, dans les 25 grammes), un contrôleur de 20 Ampères, un récepteur 4 voies, un accu LiPo 1000 ou 1300 3S et deux servos 9 grammes de bonne qualité (un petit 5 grammes si vous voulez un volet de dérive). L’émetteur doit permettre de mixer les deux servos qui contrôlent le rotor. Le pilotage s’apparente à celui d’un gentil park flyer lent qui se poserait à la manière d’un hélico, c’est à la portée d’un modéliste qui sait manœuvrer correctement un trainer à ailerons. Pour décoller, on le tient face au vent, bien cabré pour faire accélérer le rotor qui doit tourner franchement. Après quelques pas d’élan on entend le « flopflop » caractéristique des rotors, remise à plat et une petite impulsion avec les gaz au ¾. Pour tourner, on incline le rotor avec le manche des ailerons, on peut aussi tourner à la dérive, au choix. Pour monter, on met les gaz. Pas la peine de tirer sur la profondeur pour monter si le régime moteur est insuffisant, mais ça ne décroche pas. La profondeur sert surtout dans les virages pour soutenir, et à l’atterro. Pour descendre et se poser, on réduit sans couper complètement les gaz sinon il bascule. La pente de descente peut être importante : tant que le rotor tourne assez vite, il porte. Juste avant de toucher les roues, remettre un poil de gaz et à arrondir beaucoup, l’engin bien cabré se pose sur place comme un hélico. C’est un engin léger, dans les 350 grammes mais il ne craint pas un petit vent laminaire. En jouant sur les gaz et la profondeur on peut faire du stationnaire tant que le vent souffle, comme les vrais. Un autre Cierva : celui de Hobby King
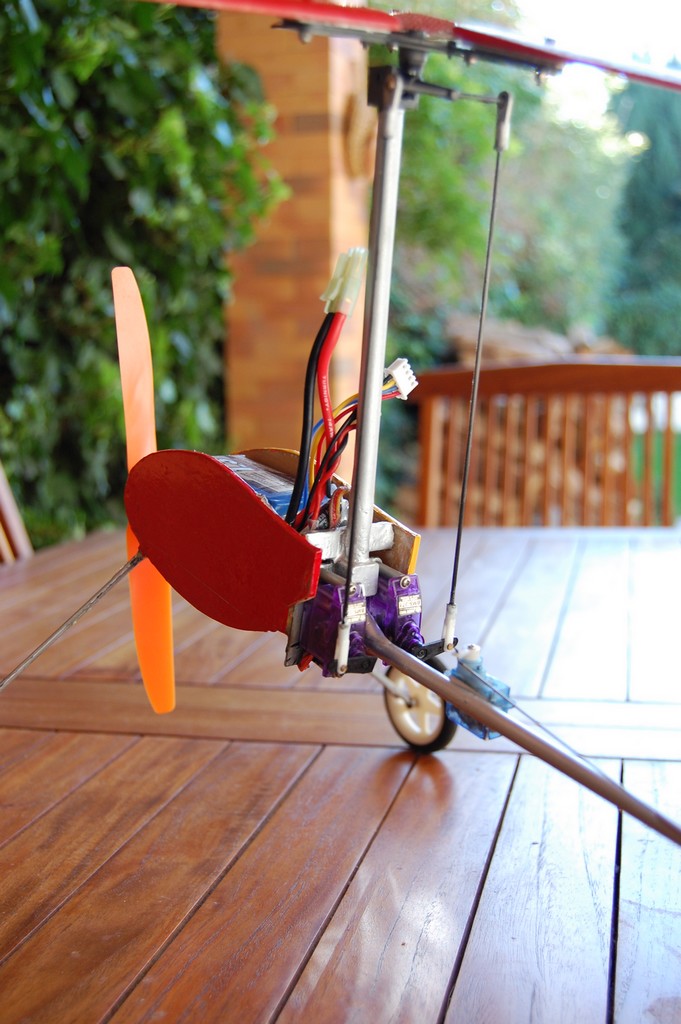
Même équipement radio que pour le Rotorshape avec un moteur plus puissant (un 2409 1600 Kv avec une 8"x4" et un accu LiPo 1600 mAh 3 S, contrôleur 25 Ampères). J’avais choisi au début un brushless bas de gamme en tôle emboutie de 1200 Kv, un peu faible mais suffisant. Ne regardez pas le faux moteur en étoile d’origine, il est grotesque. Le rotor monté est mal équilibré. Un équilibrage statique suffit : pesez les pales une à une et lestez les plus légères au saumon pour avoir trois fois la même masse au 1/10ème de gramme près (on trouve maintenant des petites balances électroniques pour quelques Euros). Le rotor doit tourner dans le vent sans balourd. Comme il n’y a aucune notice, il faut bien régler l’engin à partir de quelque chose. C’est un tripale à moteur tractif comme l’autre et avec les mêmes réglages que sur le Rotorshape au degré près, ça marche.
Je peux vous dire ma satisfaction quand il a volé parfaitement du premier coup, ça semblait presque trop facile. Il faut mettre un peu de dérive (elle est très efficace) dans les virages comme avec un planeur pour avoir de belles trajectoires, le vol est bien plus rapide que celui du Rotorshape. J’ai ajouté quelques pièces décoratives récupérées sur l’épave du Cierva LA Heli : pilote, roues, jambes de train. Une bonne deuxième machine donc, un peu lourde, rustique et solide. Le fuselage est en contreplaqué et balsa découpés au laser, l’entoilage et la déco en film thermo-rétractable sont bien exécutés, aucune vis ne manque, le kit est complet. A l’exception notable d’instructions de montage et de réglage. Le LA 500
Ce modèle se monte en quelques heures avec un tournevis et des clés Allen, du frein filet et un peu de cyano spéciale Depron ou de l’époxy. Le rotor du LA 500 est un bipale articulé qui comprend un dispositif de prérotation comme sur la plupart des autogyres grandeur actuels. Un petit variateur spécialement conçu par JETI est branché sur une voie libre du récepteur, il contrôle un moteur à charbons Mabuchi FK 180 SH (très utilisé en indoor il y a une dizaine d’années). Les fils d’alimentation rouge et noir du variateur sont soudés côté batterie aux fils du contrôleur de 40 ampères. Pour décoller, on bascule un interrupteur sur l’émetteur, le variateur envoie progressivement le courant et le rotor accélère pendant 10 secondes. On bascule à nouveau l’interrupteur et le variateur continue quand même à alimenter le moteur pendant quelques secondes le temps du roulage et du décollage, il coupe ensuite le courant. La roue libre laisse le petit moteur au repos. J’ai lu quelque part que ce dispositif était fragile. Je n’ai noté aucun signe d’usure après une vingtaine de vols. La notice déconseille clairement d’enchaîner les prérotations au sol sans temps de repos car le petit moteur chauffe vite, on évitera juste de jouer inutilement avec çà.
Il est nécessaire d’équilibrer le rotor qui a du jeu sur son axe, malgré l’emploi de deux roulements de qualité. C’est sans effet en vol, il n’y a aucune sensation de flou dans les commandes. Je n’ai pas ajouté les masselottes de bout de pale fournies, pas plus que je n’ai employé l’accu LiFe 2300 mAh recommandé. Un 3300 3 S LiPo maintenu par une petite pastille en velcro et par le baquet du pilote convient tout à fait. L’autonomie peut atteindre 16 minutes en volant calmement. Les réglages sont particuliers :
En regardant attentivement les vidéos des autogires grandeur, j’ai constaté que ces réglages n’avaient rien d’exceptionnel, ils sont à peu près les mêmes. Le centrage se mesure d’une façon assez originale en modèle réduit : le mât rotor doit être calé à 90° par rapport au plan de travail et la roulette avant doit afficher 250 grammes sur la balance. J’ai ajouté 50 grammes de plomb dans les pieds du pilote pour approcher ce réglage. Le moteur retenu est un 3536 1450 Kv avec une tripale 8"x6" Master Airscrew (excellentes hélices). La consommation maxi est de 34 Ampères en début de pack pour 1170 grammes de poussée mesurés au peson. L’autogyre pèse 1195 grammes en état de vol. J’ai monté deux leds clignotantes dans le nez pour mieux le visualiser quand il est loin et qu’il se rapproche, un autogyre vu de face ou de dos ne présente pas de grande différence en vol. C’est à mon avis la seule vraie difficulté de pilotage de ces engins et ce que j’ai pu lire sur divers forums tend à prouver que c’est aussi le cas pour d’autres modélistes à lunettes. Pour le reste, le vol est un vrai plaisir après un décollage énergique, le LA 500 est vif et précis, lent ou rapide mais toujours parfaitement stable. En combinant la dérive avec le manche des ailerons, il tourne sur place. Il peut être ralenti fortement en jouant sur les gaz et se pose presque à l’arrêt, bien calé sur le train principal. En cas de cabrage excessif il y a une petite roulette de queue qui amortit le choc.
Pour le transport, on soulève les goupilles
en balsa et on replie les pales, l’engin tient alors peu de
place.
Contacter l'auteur : xavier-mangogna@jivaro-models.org |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||