 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
Birotor coaxial
Présentation : Serge Romani
J'aime bien les engins qui sortent de l'ordinaire,
surtout quand il faut cogiter un peu pour les réaliser. Ils exigent
parfois une mise au point un peu délicate, voire quelques évolutions
ou remaniement. Une fois que tout est au point, c'est un vrai plaisir
de les piloter.
Ayant réalisé plusieurs multicoptères "maison"
avec 2, 3 ou 4 moteurs, je me suis amusé à fabriquer ce
birotor coaxial qui a été présenté notamment
à Inter-Ex en Suisse.
 |
 |
|
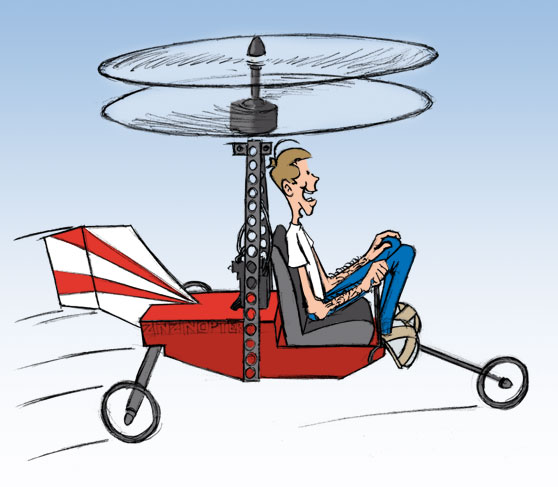
Le Zinzinoptère
a pas mal volé durant l'édition d'Inter-Ex à
Versoix, entre les mains de plusieurs pilotes. |
||
Vol de prise en main de l'appareil. |
Construire un tel appareil n'a rien de vraiment
difficile. Les outils sont ceux qu'on trouve dans tout atelier et tout
le matériel utilisé vient de la bricaillerie du coin.
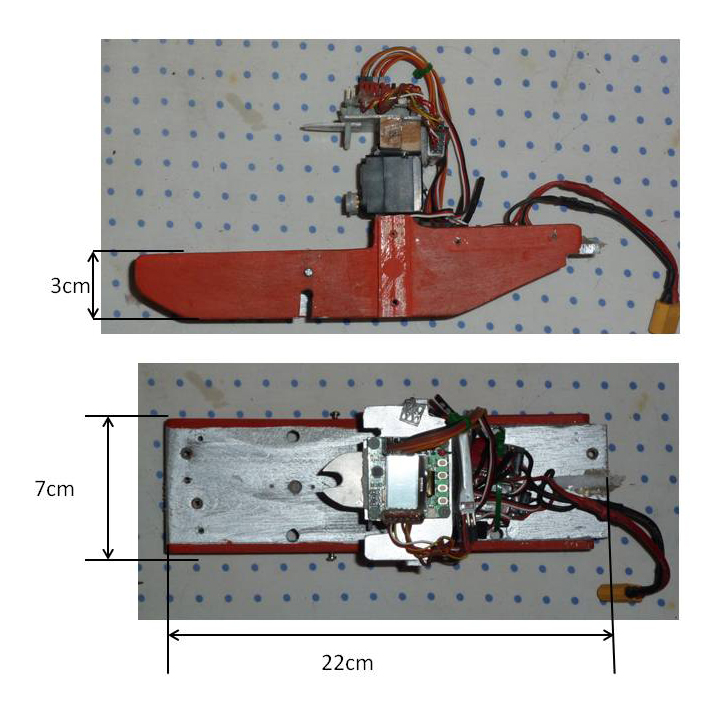
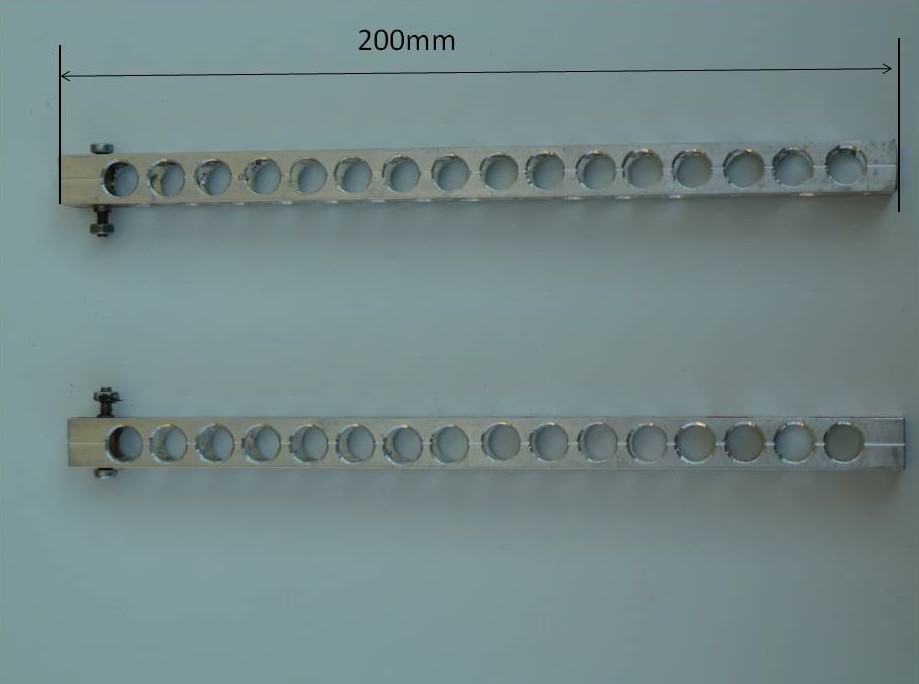
Pour le fuselage, j’ai utilisé du contre plaqué
de 3 mm. Les bras support moteur sont en tube carré de 10 mm.
Comme il est un peu épais, j’ai percé une multitude
de trous ; finalement c’est plus joli.
Le train d’atterrissage n’est que du "high tech"...
![]() En fait, du plat d’alu de 10 mm et du tube PVC de 40 mm découpé
en rondelles.
En fait, du plat d’alu de 10 mm et du tube PVC de 40 mm découpé
en rondelles.
|
|
|||||
Il n'existe
pas de plan du Zinzinoptère, juste quelques cotes pour
information. Chacun est libre de créer un châssi
à sa façon. |
||||||

 |
 |
|
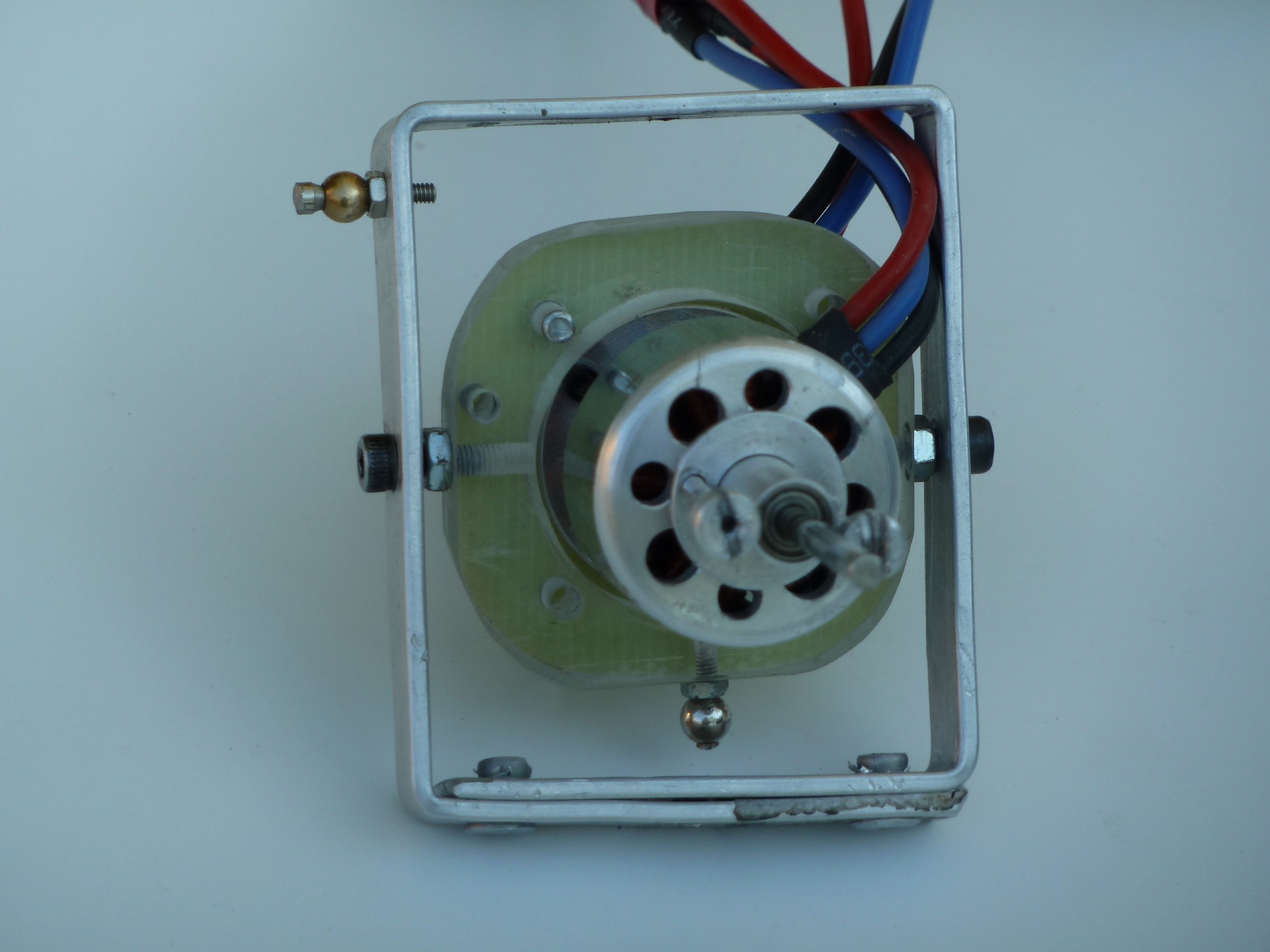
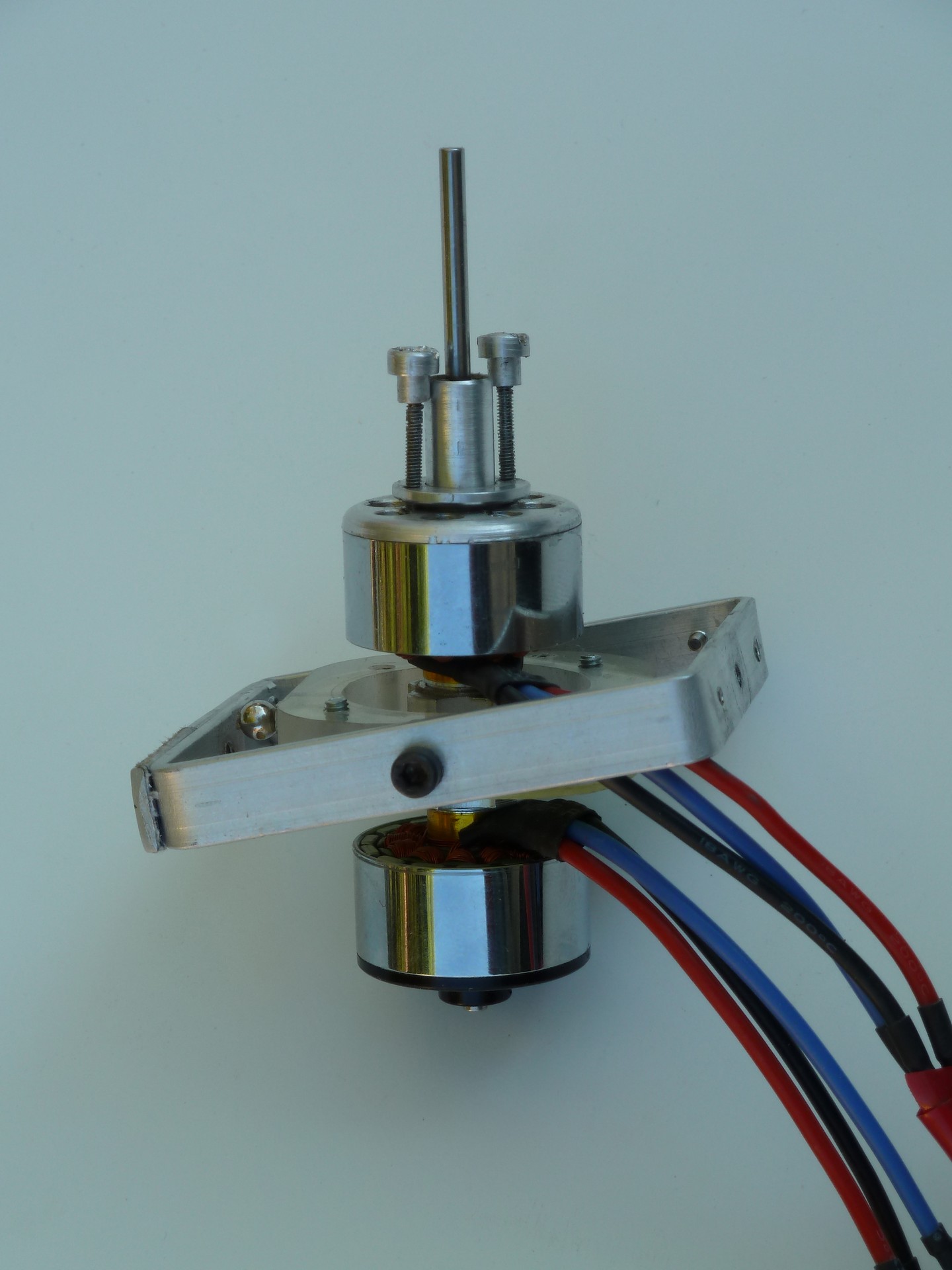
Les moteurs sont des
2210 N 1000 kV de chez Hobby King. J'ai été obligé
de modifier la cloche du moteur spérieur pour en faire
un contrarotatif. Finalement, on le trouve tout fait chez le même
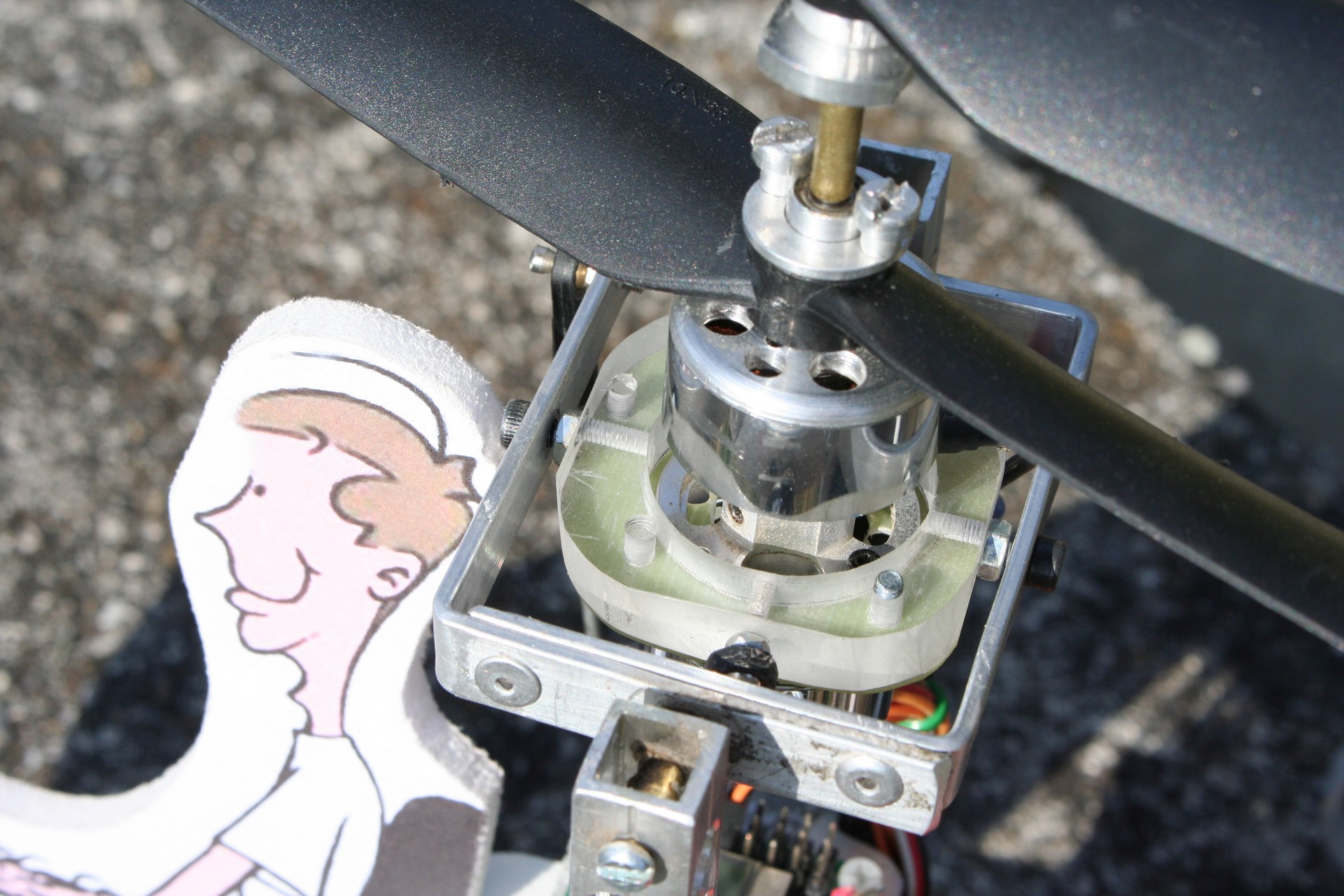
fournisseur... Le plus complèxe, ce sont les supports moteurs car il faut fabriquer un cardan, ici fait en plat d’alu et un morceau de plastique épais style planche à découper de cuisine en téflon. |
||
 |
 |
|
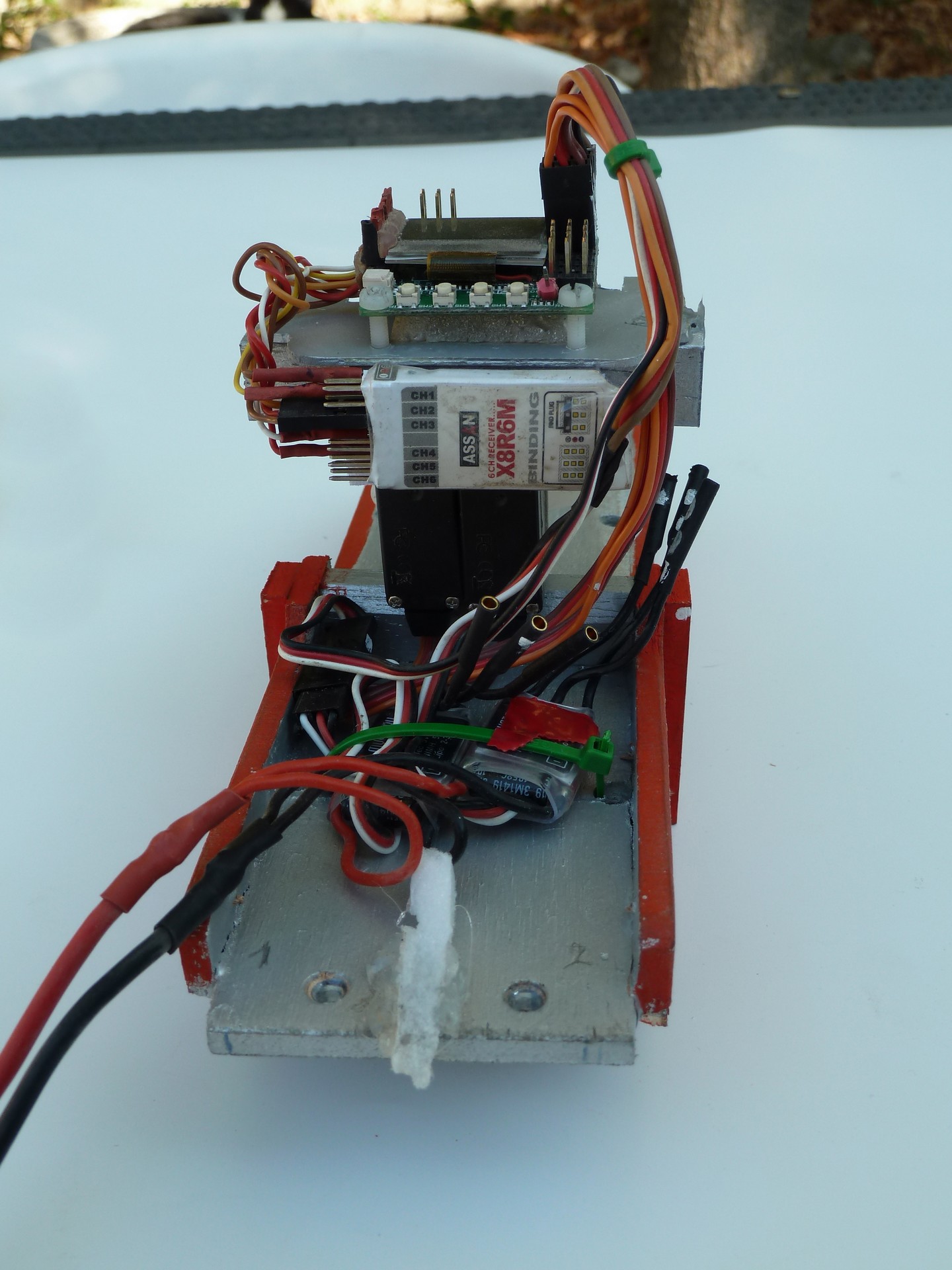
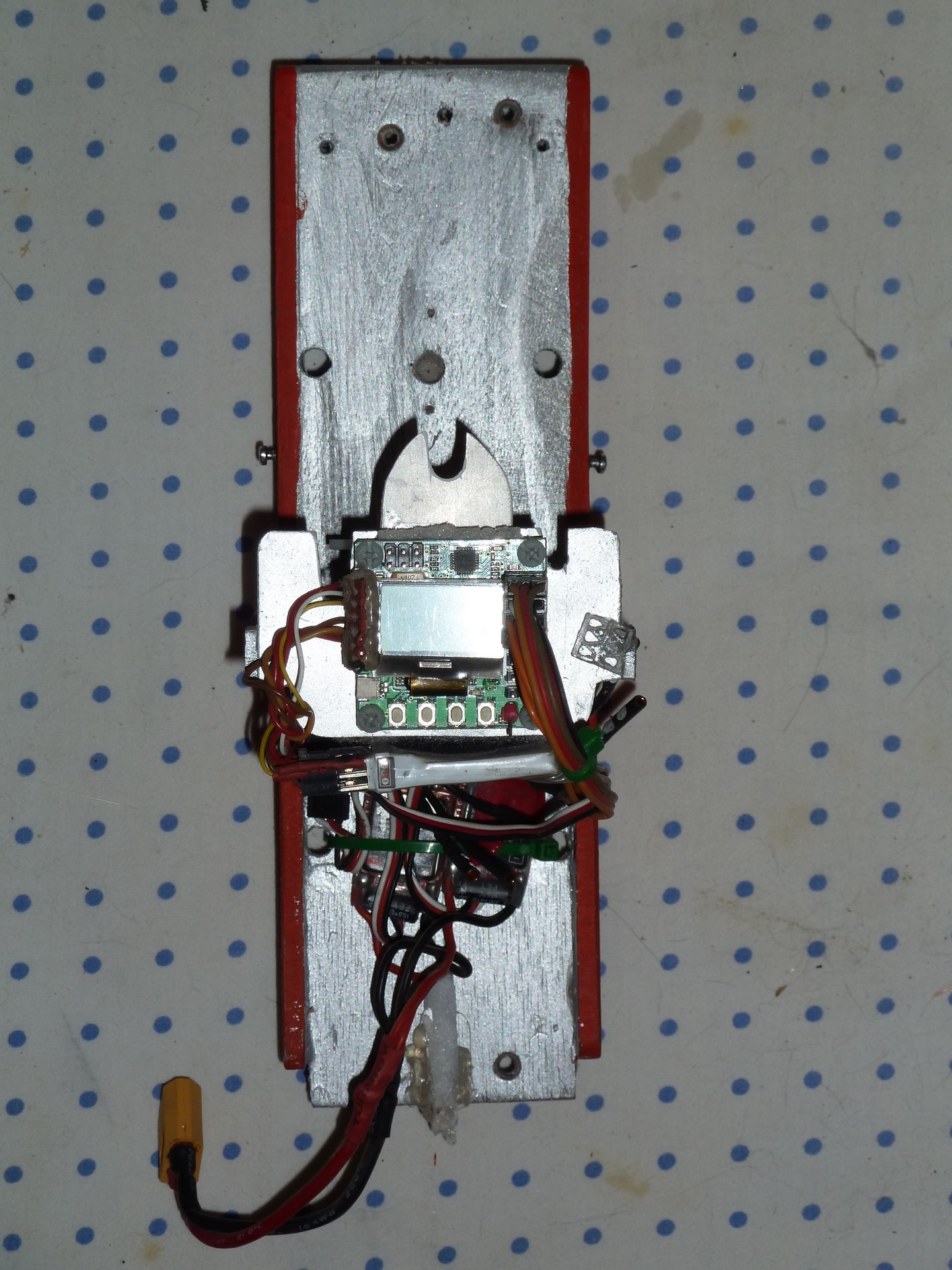
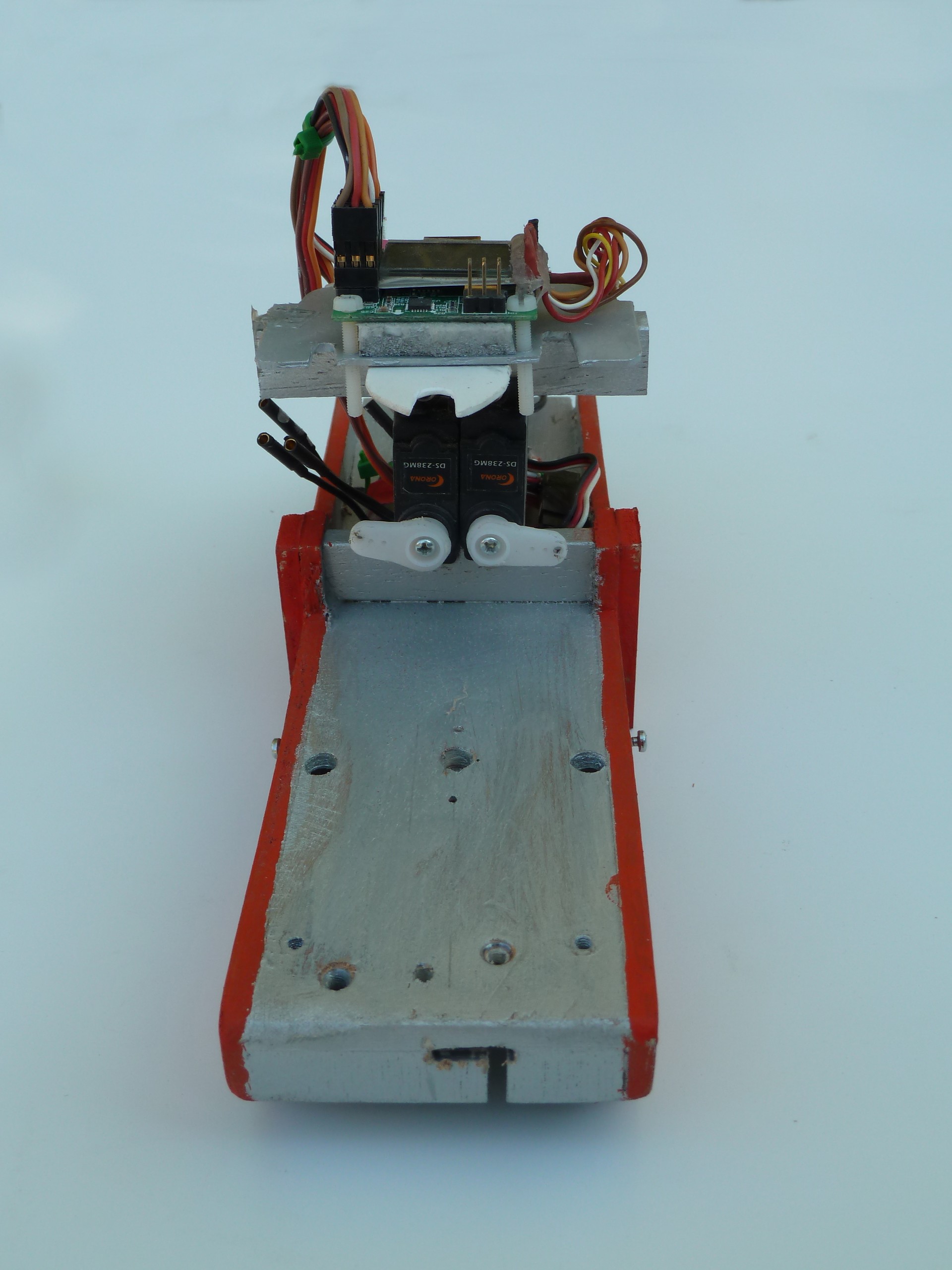
Ce cardan est commandé
par deux servos, j’ai mis des Corona 2,5 kg à pignons
métal. Pour les tiges de commande, c’est du rayon de vélo refileté à 2 mm. |
||
 |
 |
|
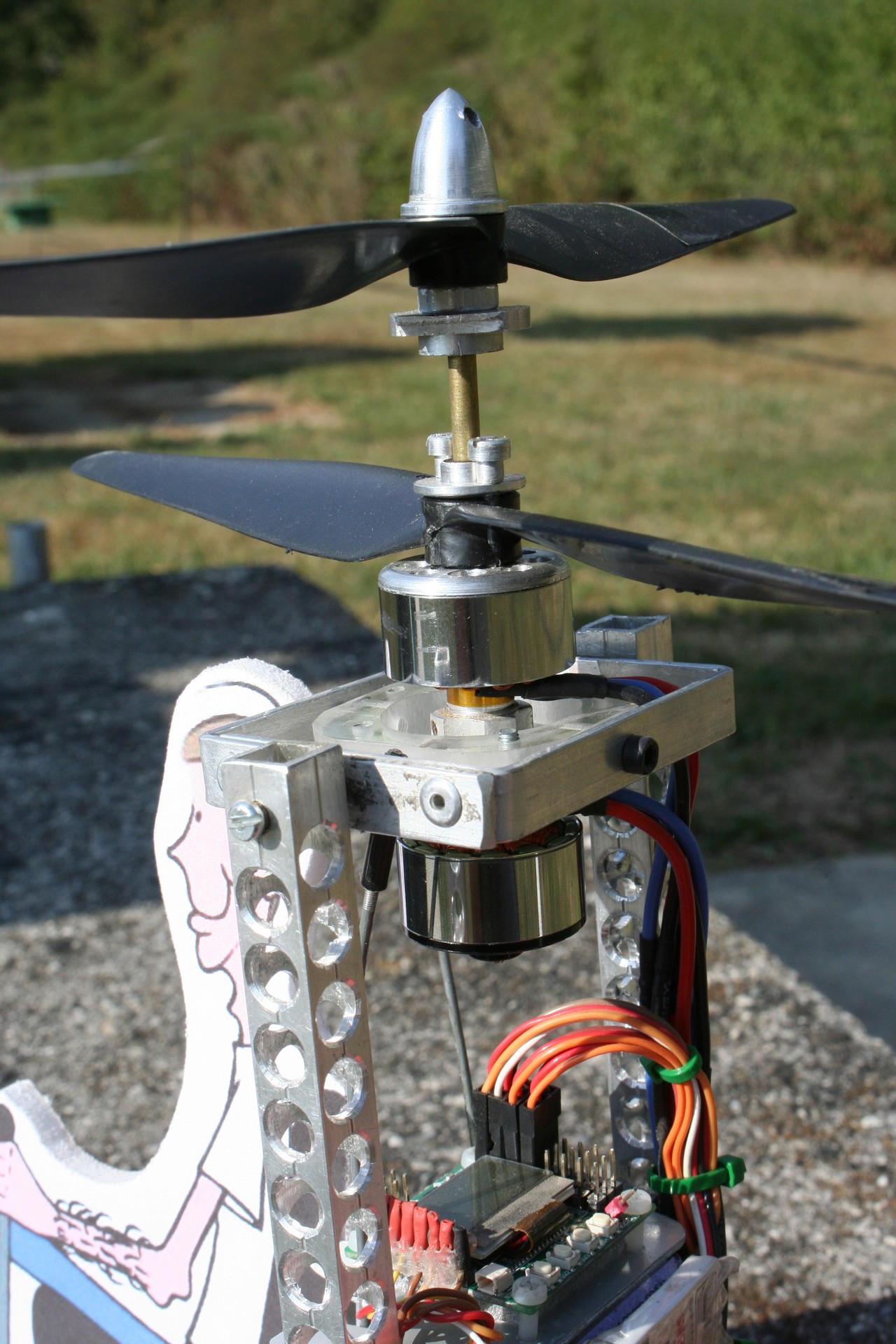
| Les hélices 10''x6'' ont pour l'une
le pas à gauche et pour l'autre à droite, ainsi les
effets de couple s'annulent. Les deux contrôleurs sont des
10 A. La carte est une Mini KK2 programmée sur « single copter 2M2S ». J’aime bien cette carte, ce n’est sûrement pas la meilleure mais elle se programme avec les boutons sur la carte (les nouvelles ont un boîtier séparé) sans aver besoin d'être connectée à un ordinateur. |
||
 |
 |
|
| Le personnage de Zinzin (qu'on voyait dans les pages des revues Looping, Aerotech et Passion'Ailes) est imprimé sur du papier collant et collé sur du dépron de 6 mm. Merci au dessinateur orstunisch de m'avoir permis de l'utiliser sur mon birotor. Le plus amusant dans l'histoire, c'est que mon Zinzinoptère à inspiré le dessinateur qui a décidé d'intégrer cet engin volant dans une de ces futures bandes dessinées ! | ||
 |
| Le premier album d'orstunisch (dessinateur
de Zinzin), Zinzinsunendliche, est un voyage magique à travers
la France hors des sentiers battus. Pas de Tour Eiffel ni de Côte
d'Azur. Au lieu de cela, vous ferez l'expérience d'un voyage
fantastique à travers des paysages variés où
les yeux parcourent l'horizon. Un monde où vous pouvez vous
promener suivant l'envie, sans se presser, en tournant les pages
en avant... ou en arrière !
Ce livre ne comporte qu'un seul dessin qui s'étale au fil des pages pour un long voyage. Un panorama unique plein de rencontres surprenantes et des détails amoureusement conçus. A commander en Allemagne. Détails en cliquant sur l'image pour accéder au site officiel. |
|
 |
|||
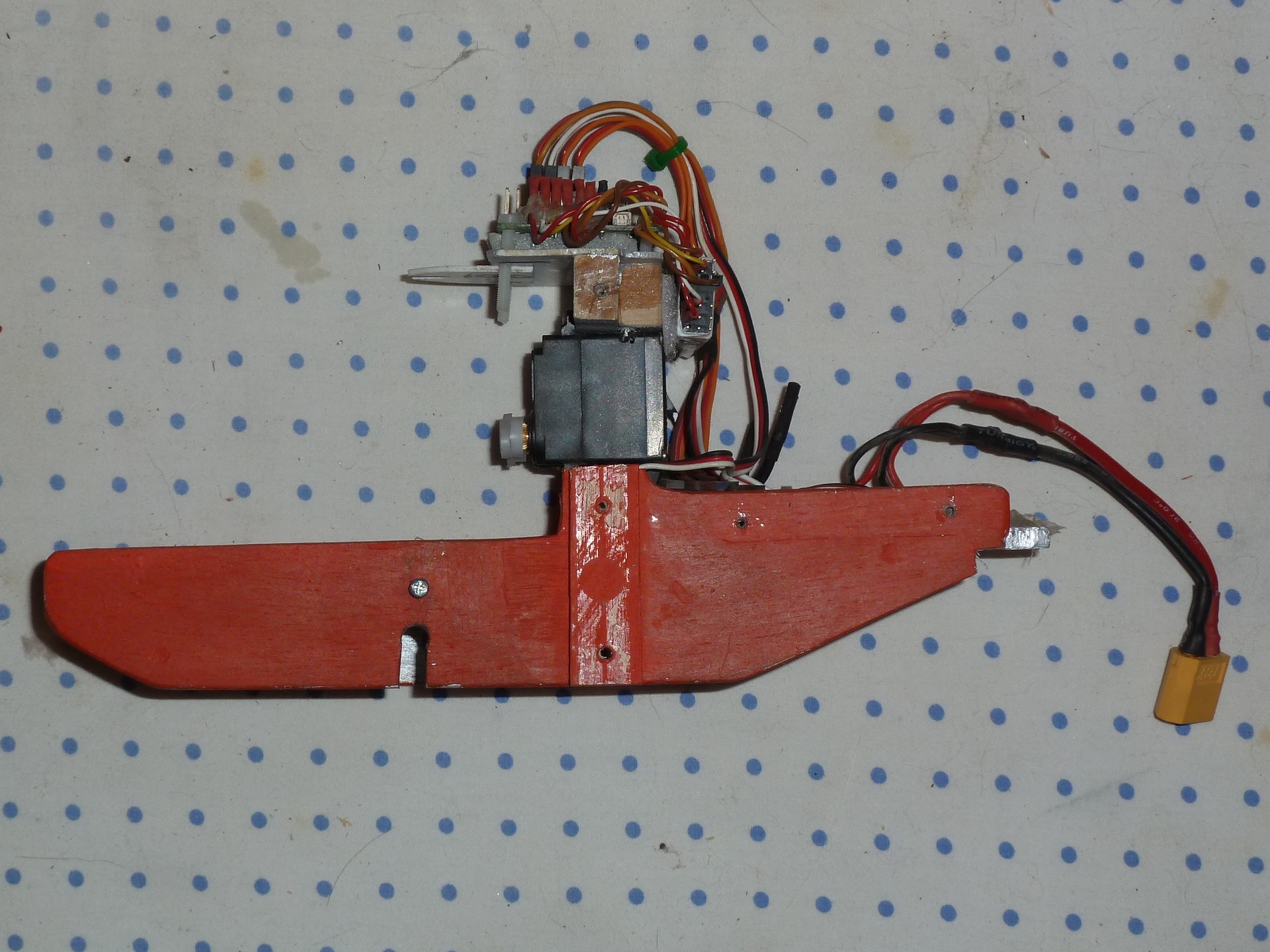
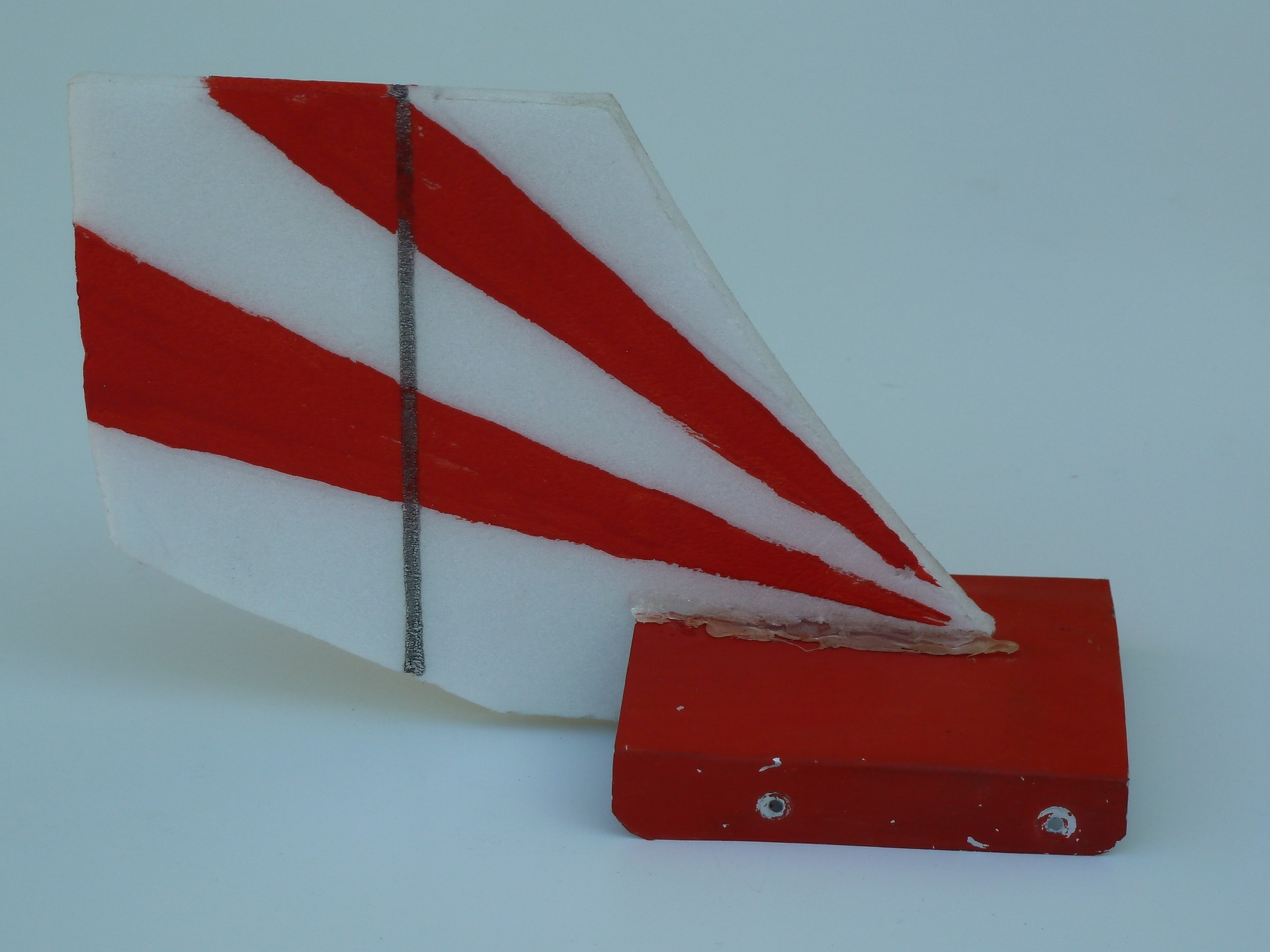
La cellule est principalement
en contre-plaqué. La dérive est en Dépron
de 6 mm. Elle est fixée en place au pistolet à colle.
|
||||
 |
 |
|
| La batterie se glisse sous le châssis. Les servos sont dirigés vers l'avant. Le pilote amovible les masque partiellement. | ||
 |
Tout est démontable. Pratique
pour la maintenance, ou pour faire des évolutions du châssi. |
Réglages
carte KK2 |
|||||
Choisir
"Laod motor layout", Single copter, 2M 2S (2 moteurs,
2 servos) |
|||||
| PI Editor | P Gain |
P Limit |
I Gain |
I Limit |
|
| Roll (aileron) | 30 |
51 |
25 |
20 |
|
| Pitch (Elevator) | 30 |
51 |
25 |
20 |
|
| Yaw (Rudder) | 30 |
15 |
33 |
10 |
|
| Stick Scaling | Roll (aileron) | 30 |
|||
| Pitch (Elevator) | 30 |
||||
| Yaw (Rudder) | 40 |
> 50 |
|||
| Throttle | 90 |
||||
| Self-Level Settings | P Gain | 62 |
|||
| P Limit | 20 |
||||
| Trim roll | 0 |
||||
| Trim Pitch | 0 |
||||
| Mode Settings | Self Level | Aux |
|||
| Arming | Yes |
||||
| Link roll pitch | Yes |
||||
| Auto disarm | Yes |
||||
| CPPM Enable | No |
||||
| Misc. Settings | Minimum Throttle | 10 |
|||
| Height Dampening | 0 |
||||
| Height D. Limit | 0 |
||||
| Alarm 1/10 volt | 0 |
||||
| Servo filter | 50 |
||||
| Mixer Editor | CH1 |
CH2 |
CH3 |
CH4 |
|
| Throttle | 100 |
100 |
0 |
0 |
|
| Aileron | 0 |
0 |
-100 |
0 |
|
| Elevator | 0 |
0 |
0 |
-100 |
|
| Rudder | 100 |
-100 |
0 |
0 |
|
| Offset | 0 |
0 |
50 |
50 (Réglage neutre servo) |
|
| Type/Rate | ESC High |
ESC High |
Servo Low |
Servo Low |
|
| CPPM Setting | Roll | 1 |
|||
| Pitch | 2 |
||||
| Yaw | 4 |
||||
| Throttle | 3 |
||||
| Aux | 5 |
||||
CH1 Moteur Pas à gauche |
CH2 Moteur Pas à droite |
Servo Droite Gauche |
Servo Avant Arrière |
||
 |
 |
|
En ordre de vol, l'appareil
pèse 600 g avec une batterie Lipo 3S 2200 mAh. Les moteurs s'inclinent vers l'avant ou vers l'arrière pour avancer ou reculer. Ils se penchent sur le côté pour le déplacement latéral. L'axe de lacer est piloté par la variation de régime et donc de couple des moteurs. La dérive est fixe, uniquement là pour bien repérer l'avant de l'arrière. |
||
 |
 |
|
Atterrissage dans
la main du pilote. Ca vole tout seul, ou presque. |
||
 |
 |
|
Par la suite, l'appareil
a reçu des roues et un 3e moteur propulsif afin de faire
du guidage au sol. |
||
Version "Tuning" avec
un 3e moteur propulsif et une roulette directrive pour le roulage. |
 |
 |
|
Je vous ai donné
les grandes lignes, après libre à vous de faire
comme bon vous semble. Bon vols ! |
||
Contacter l'auteur : serge-romani@jivaro-models.org
 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||