 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| |
 |
AC-DIYMOT-VL |
 |

Comment l’acheter ?
Pour commencer, je tiens d’abord à souligner que ce moteur n’est pas en vente en France. Pour l’instant, il s’agit d’une exclusivité d’un magasin de vente par correspondance se trouvant au Japon, Aircraft World. Comme son nom l’indique, ce magasin vend des articles de modélisme dans le monde entier, par le biais de son site Internet : www.aircraft-world.com. Seule contrainte pour nous Français, c’est la maîtrise de la langue de Shakespeare nécessaire pour passer une commande, le reste étant extrêmement attractif : paiement sécurisé par Paypal ou par CB, tarif en dollars US (donc bénéficiant du taux de change actuel très favorable, délais de livraison inférieurs à la semaine (généralement, commande le lundi et livraison le vendredi).
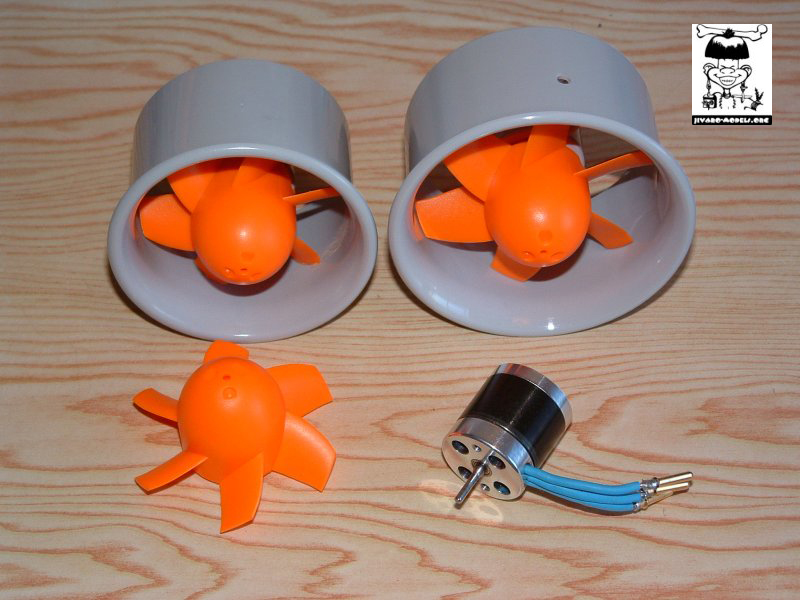
 Les kits de moteurs brushless à cage tournante, à bobiner soi-même, sont de plus en plus courants. C’est la meilleure façon d’adapter les performances en fonction de leurs destinations. |
Voilà pour la partie commerciale de l’histoire. Passons maintenant au moteur, dont voici un bref résumé des caractéristiques données par Aircraft World :
- désignation : AC-DIYMOT-VL. Ce nom barbare se traduit simplement par : moteur à faire soi-même (Do It Yourself), V signifiant polyvalent (Versatile) et L signifiant long (Long)
- tarif : $ 34,95, soit environ 26 €
- Puissance annoncée : 160 W maximum
- Dimensions : Ø 23,5 x 25,3 mm, masse 40 g
- Usage : turbine, réducteur ou en direct
Le site Internet fournit quelques photos attrayantes
et deux schémas de câblage, mais rien de bien intéressant
à mon avis, et surtout ne permettant pas à un acheteur
non averti d’assembler correctement ce moteur. Depuis peu, on
trouve aussi quelques résultats donnés par des clients,
dont certains intéressants, ainsi que des liens vers des forums
de RC-Groups parlant de ces moteurs. Attention, on y lit parfois de
grosses bêtises...
Bref, on s’imagine sans difficulté que Aircraft World est
simplement un revendeur et non le constructeur réel de ce moteur.
Malgré tout, et en dépit des très maigres infos
qui pouvaient cacher un gros bide technique, je l’ai quand même
acheté. Et, soyons honnête, mes premiers essais et tâtonnements
m’ont presque fait croire que cela était le cas, avant
que je ne trouve la bonne voie.
Premier contact
Inutile de vous dire qu’à ce prix on ne découvre
pas ce moteur au sein d’un emballage rutilant, et encore moins
accompagné d’une notice. Voilà de quoi déconcerter
les néophytes s’attendant à un kit genre avion Graupner,
avec un beau plan et une notice fourmillant d’indications. Ici,
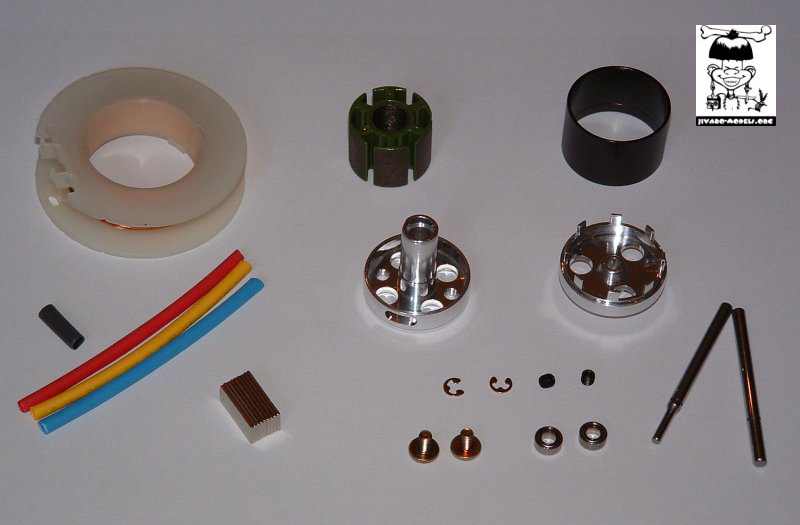
juste un sachet plastique contenant les quelques pièces composant
ce moteur, dont voici la liste exhaustive :
- le flasque en aluminium
- le porte-cloche en aluminium
- la cloche en acier zingué noir
- les huit aimants 13x6x1 plus un aimant de rechange
- deux arbres en acier trempé, l’un ayant l’extrémité
tournée à Ø 2 et l’autre à Ø
3
- deux roulements 3x7x3
- le stator isolé par de la peinture laquée, Ø
19x13
- la bobine de fil de cuivre émaillé Ø 0,3, suffisante
pour au moins deux bobinages
- des gaines thermorétractables
- la visserie
Il faut souligner que la qualité des éléments
fournis compense très largement la rusticité de l’emballage.
En effet, les pièces sont toutes magnifiquement usinées,
et paraissent presque polies. La précision est aussi excellente,
tous les éléments s’adaptant parfaitement les uns
aux autres sans aucun jeu. A noter aussi la bonne idée de prévoir
des encoches dans le support de cloche, ce qui rend le positionnement
des aimants très facile. Dans le même registre positif,
le fil fourni est d’une qualité excellente : le vernis
isolant fond très facilement à la température d’un
fer à souder, ce qui facile énormément les soudures
en évitant la phase pénible de grattage du vernis.
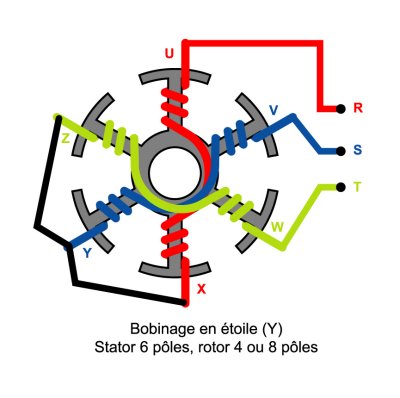
Autre très bon point à souligner, c’est le choix
d’un stator 6 pôles, d’une très grande simplicité
à bobiner, à condition de suivre le bon schéma
de câblage (voir plus loin), malheureusement non fourni dans le
site Internet. Petit bémol par contre pour les aimants, qu’il
faut manipuler avec beaucoup de précautions à cause de
leur finesse. Leur très forte aimantation est par contre le gage
d’un bon rendement.
 Bobiner un stator n’a rien de compliqué. Il faut juste un peu de concentration pour compter les spires et d’application pour placer au mieux le fil. Ici, la cage est même conçue pour que les aimants se positionnent parfaitement. |
Assemblage
Si cette phase est presque anecdotique pour un habitué, elle
risque cependant de beaucoup dérouter le novice. Je vais tenter
de décrire au mieux cette étape cruciale pour les futures
performances du moteur.
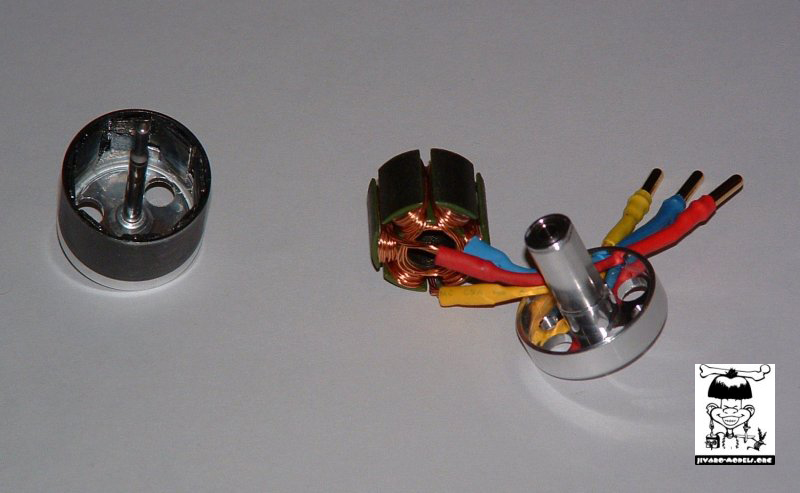
Assemblage du rotor
Sous cette désignation se cachent en fait 3 éléments
: le support de cloche, la cloche et les aimants. Tout d’abord,
on assemble la cloche en acier sur le support de cloche, après
les avoir soigneusement nettoyés à l’alcool à
brûler et les avoir séchés. L’assemblage se
fait par collage, idéalement avec une résine anaérobie
type Bloc-Press ou équivalent (frein filet fort), ou à
défaut la cyano. La plupart des modélistes ayant plutôt
une cyano à leur disposition, j’ai choisi cette dernière
solution, qui tient finalement sans soucis.
Ensuite vient l’étape délicate de la mise en place
des aimants. Il faut savoir que leur magnétisation se trouve
dans le sens de leur épaisseur, et qu’il faudra alterner
pôles sud et pôles nord lors du montage. La méthode
la plus simple pour ne pas se tromper consiste à attribuer arbitrairement
le pôle nord à l’une des extrémités
de la pile d’aimants, l’autre pôle devenant le pôle
sud. Chaque pôle est identifié avec l’aide d’un
marqueur noir. On enlève les aimants toujours du même côté
de la pile, en n’oubliant pas de repérer au marqueur le
pôle visible de l’aimant suivant restant sur la pile. Par
exemple, si on dépile du côté nord, on verra alors
sur le stator alternativement un aimant non marqué suivi d’un
aimant marqué nord, et ainsi de suite. On a donc 8 aimants positionnés
: N-S-N-S-N-S-N-S. A ce sujet, j’ai lu sur le forum RC-Groups
un post préconisant un ordre N-N-S-S-N-N-S-S afin d’avoir
un régime de rotation plus élevé, ce que je vous
déconseille formellement.
Pour la mise en place des aimants, je vous suggère d’utiliser
un petit cutter pour les séparer au fur et à mesure de
leur pile, en glissant la lame parallèlement à l’épaisseur.
Sans cette précaution, il est très facile de briser en
plusieurs morceaux un aimant, cela m’est arrivé en voulant
les séparer à la main. De même, il faut laisser
l’aimant sur le cutter pour le faire glisser sans effort sur la
cloche. Ensuite, cela va tout seul, il suffit de pousser chaque aimant
jusqu’au fond de son logement, avec un petit bout de bois dur
pour ne pas l’abîmer. Une goutte de cyano entre chaque aimant
et la cloche termine parfaitement cet assemblage.
Le choix du câblage
C’est là où tout se joue ! Il s’agira donc
d’être aussi soigneux que pour la mise en place des aimants.
C’est là aussi où j’ai rencontré le
plus de difficultés pour obtenir un moteur fonctionnant correctement,
ayant testé beaucoup de configurations, avec des premiers essais
très peu concluants. Heureusement, les bons compromis ayant été
trouvés, je peux maintenant vous certifier que les résultats
obtenus sont excellents, et placent ce moteur en concurrence avec les
meilleurs moteurs actuels.
Pour expliquer la structure d’un câblage sans rentrer dans
des détails trop techniques, il faut d’abord comprendre
que cela se décompose en deux étapes.
- La première consiste en l’enroulement des fils de cuivre
sur chaque dent du stator, tandis que la seconde étape permet
de relier les fils entre eux et au contrôleur. Le sens d’enroulement
des fils est tributaire du nombre et de l’agencement des aimants
(le fameux N-S-N-S... expliqué ci-avant) afin d’avoir un
enchaînement correct d’attraction/répulsion entre
les dents du stator et les aimants du rotor. Lors de l’enroulement
des fils sur chaque dent du stator, on choisit une section de fil (dans
le cas de notre moteur, un nombre de fils que l’on bobine ensemble
en parallèle) et un nombre de tours de fil en adéquation
avec la destination du moteur : plus de tours de fil et/ou fil plus
fin donnent un moteur fait pour tourner lentement, et vice-versa. De
plus, il faut remplir de cuivre au mieux chaque dent afin d’optimiser
le rendement.
- La seconde étape consiste à choisir le type de branchement
: étoile ou triangle. A enroulements équivalents, le second
donne un régime et une consommation très supérieurs
au premier, ou à contrario demande beaucoup plus de spires par
dent (donc très difficile à bobiner) pour garder un régime
équivalent au câblage étoile. Voilà finalement
beaucoup de paramètres à mettre en adéquation pour
réaliser un moteur répondant à ses attentes.
Après avoir testé une certaine quantité de combinaisons
et évalué leurs impacts sur les performances, le rendement
et la facilité de câblage, voici ce que je vous recommande
fortement :
- choix du branchement : étoile
- choix des enroulements : 6 à 8 tours par dent de 3 fils Ø
0,3 ou 5 à 6 tours de 4 fils Ø 0,3
Ces choix donnent un moteur facile à câbler,
tournant très vite avec un excellent rendement et une puissance
importante. Cela écarte d’office une utilisation en direct
avec une hélice, contrairement à ce qu’affirme le
site Internet du constructeur. Bien entendu, on peut quand même
l’utiliser en direct, mais le rendement sera relativement mauvais,
sauf éventuellement pour un usage racer avec de petites hélices
tournant très vite. Faute de notice et de valeurs de référence
de la part du constructeur, certains clients se sont obstinés
à essayer de faire tourner ce moteur avec des hélices
type APC Slow (8”x3,8”, 9”x4,7”, etc.), avec
des rendements de l’ordre de 60 % pour des puissances modestes,
alors que ce moteur est capable d’un rendement supérieur
à 80% à des puissances très élevées.
Tout cela est d’ailleurs fort logique : sans même parler
du bobinage, la conception de ce moteur (6 pôles de stator / 8
aimants) ne le rend réellement intéressant qu’à
haute vitesse. Il présente en effet une réduction magnétique
de 4 contre 6 à 7 pour des moteurs à cages tournantes
destinés à un usage en prise directe. En fait, on retrouve
ici le même raisonnement que celui appliqué par Electronic
Model pour ces nouveaux moteurs Cyclon à cage tournante : faible
masse et très forte puissance à haut régime, et
rendement très élevé.
Le câblage en détail
Maintenant que la structure du câblage est établie en fonction
de la puissance désirée et au régime désiré
(se référer aux tableaux d’essais), passons à
l’application pratique. En premier lieu, je ne conseille pas de
suivre les schémas donnés sur le site de Aircraft World.
Voici la meilleure technique à suivre :
Connaissant le nombre de fils à mettre et le nombre de spires
par dent, couper autant de fils que nécessaire, en calculant
la longueur de la manière suivante : longueur en millimètres
= 80 x (nombre de spires par dent) + 100 à 150 mm.
On bobine toujours deux dents à la fois, les deux
dents étant face à face (symétriques).
Le bobinage commence par marquer les fils au milieu de leur longueur
et à positionner ce milieu au niveau de l’espace compris
entre deux dents. On bobine ensuite chaque dent de l’intérieur
du stator vers l’extérieur, en prenant garde de bien tendre
les fils et d’éviter qu’ils ne se chevauchent trop.
Chaque dent est bobinée dans le même sens que sa vis à
vis, en miroir. A la fin du bobinage, les fils ressortent du stator
du même côté que la boucle.
Les 3 séries de fils sont bobinées exactement de la même
manière. Un bon moyen de contrôler que chaque dent a reçu
le même nombre de spires que ses collègues : tous les fils
sortant du moteur doivent avoir la même longueur à 1 ou
2 cm près.
On réalise ensuite la terminaison en étoile, appelée
aussi point central. Pour cela, il suffit de prendre les 3 fils consécutifs
d’un côté du câblage pour les torsader ensemble,
puis de les souder à environ 10 mm du stator. La petite gaine
thermo fournie dans le kit vient ensuite recouvrir cette soudure pour
éviter tout court-circuit.
Montage final
On monte ensuite le stator sur le flasque, en passant les 3 fils d’alimentation
par l’ouverture adéquate. Un simple morceau de fil de cuivre
est enroulé dans l’encoche du flasque côté
cloche pour éviter que le stator ne bouge. On passe ensuite les
gaines thermorétractables sur les fils d’alimentation,
puis quelques gouttes de vernis à ongles sur le bobinage en cuivre
éviteront qu’il ne bouge avec d’éventuelles
vibrations.
Il reste alors à monter le rotor sur l’arbre le mieux adapté
à son utilisation, puis à serrer les deux vis allen. Même
si les arbres rentrent sans jeu sur le rotor, il vaut mieux quand même
serrer alternativement les vis allen de plus en plus fort plutôt
afin d’éviter tout défaut d’excentration du
rotor. Les roulements sont ensuite enfoncés dans leur logement,
avec une petite goutte de cyano pour les immobiliser (attention de ne
pas faire rentrer la cyano dans les roulements). La dernière
étape consiste à enfiler l’arbre et le stator, puis
à poser le petit clip sur l’arbre pour éviter tout
déplacement axial intempestif.
 Une faible masse, un rendement élevé, malgré un prix réduit, ce moteur aux performances remarquables va faire des adeptes. |
Et voilà, on se retrouve enfin possesseur d’un joli petit moteur brushless à cage tournante. Un passage à la balance nous donne un petit 38-39 g suivant le câblage, soit la masse d’un modeste Speed 280. Il va falloir maintenant vérifier si les performances seront à la hauteur... d’un brushless, pas d’un Speed 280 !
Les essais
Afin de peaufiner le choix des bobinages, je me suis limité à
des essais sur des turbines GWS 55 et 64, qui me font très forte
impression. Cela me paraissait aussi un complément indispensable
à l’article paru sur les turbines GWS, dans lequel ce moteur
est maintes fois évoqué. De plus, je n’avais pas
forcément le temps nécessaire pour refaire une seconde
fois tous les bobinages et les mesures avec différents couples
hélice/réducteur.
Ceci dit, il suffit de relever les points de fonctionnement (tension,
intensité, régime) pour les appliquer à une utilisation
avec réducteur. Par exemple, on a le point de fonctionnement
suivant avec 5 spires de 4 fils Ø 0,3 et une turbine GWS EDF-55
: 11 V, 21 A, 34 200 tr/min. Avec un réducteur de ratio 4,4,
cela donnerait environ 7 800 tr/min. A peu de choses près, ce
régime et ce niveau de puissance correspondent à une 10”x7”
APC (voir essai des moteurs HET-RC Typhoon). En l’absence de mesures
donnant la correspondance, un petit logiciel gratuit de Louis Fourdan
se révèle très pratique : Astrobob. On le trouve
sur le site d’Alain Legallou : www.legallou.com
à la rubrique Modéliste / Technique / Outils. Il permet
très facilement de se faire une idée des performances
d’une motorisation. Pour ce qui nous intéresse, connaissant
la tension, l’intensité et le régime, il suffit
d’essayer quelques valeurs de diamètre et de pas d’hélices
jusqu’à avoir un rendement calculé supérieur
à 75-80% pour connaître l’hélice adaptée
au réducteur et au point de fonctionnement choisi. Certains fabricants
d’hélices donnent aussi une abaque liant le régime
de rotation de l’hélice à la puissance absorbée.
Là aussi, en estimant en moyenne à 75% le rendement de
l’ensemble moteur/réducteur, il sera facile de faire un
choix.
Les amateurs de turbines électriques vont apprécier les performances offertes avec les GWS-55 et GWS-64. |
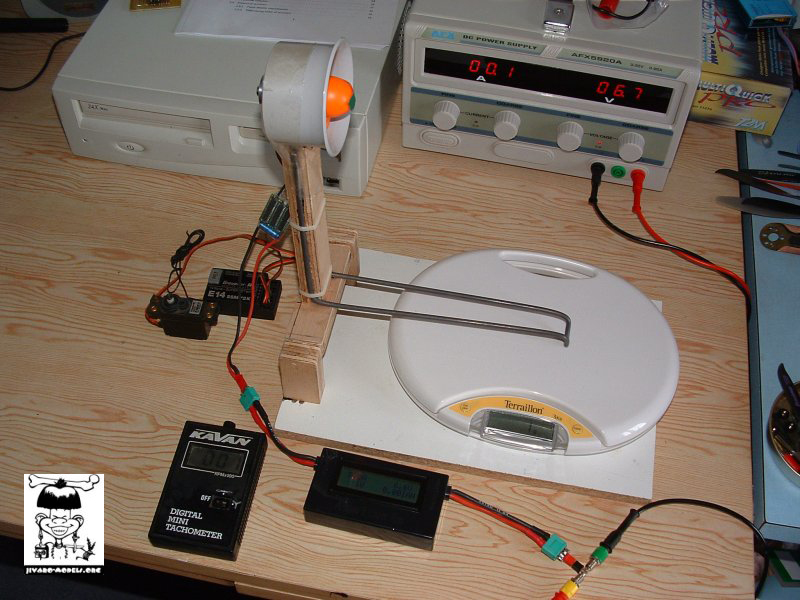 Le banc de mesure qui a permis de comparer les performances en fonction des différents bobinages effectués. |
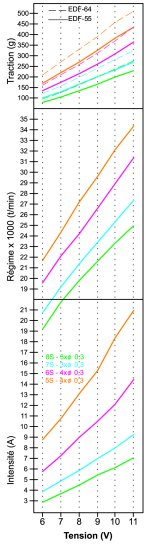
Mais revenons à nos essais de ce moteur avec les turbines GWS. Cette fois-ci, j’ai conçu un nouveau banc d’essai afin de réaliser à la fois des mesures de poussée, indispensables bien sûr, mais aussi des mesures de rendement. Dans les deux cas, l’ensemble turbine/moteur est simplement fixé par du scotch d’emballage sur un support articulé sur roulements à billes afin d’avoir une mesure la plus fiable possible. Les mesures de tension et courant ont été confiées à un Astro WattMeter (merci encore à Laurent Chef), tandis que la commande du moteur a été confiée tout d’abord à un Jeti-30, puis ensuite à un contrôleur Castle Creation Phoenix 25. Au sujet des graphiques de résultats : les valeurs de consommation et de régime des turbines EDF-55 et EDF-64 pour la même configuration de moteur sont tellement proches (entre 0 et 2% de différence) que les courbes en résultant ont été confondues pour plus de lisibilité. Concernant les mesures de rendement, il s’agit pour l’instant d’une approche indicative : en effet, les valeurs de couple (couple en Nm = 0,00981 x mesure en g x bras de levier en mètre) mesurées sont assez faibles par rapport à la précision de la balance utilisée, ce qui donne des valeurs de rendement précises à environ +/- 5%. Je ne donnerai donc pas de graphique de rendement, mais cependant la moyenne de plusieurs mesures est assez significative pour que je donne quelque ordre d’idées.
Après plusieurs heures d’essais, mises au point, puis enfin
mesures et vérifications des résultats, voici les quelques
éléments intéressants qui se dégagent :
Le fonctionnement global : plusieurs heures d’essais n’ont révélé aucune défaillance ni prise de jeu. Je redoutais un éventuel défaut d’équilibrage à cause de la vitesse de rotation très élevée et des masses en rotation, sans parler d’un possible défaut d’usinage ou de montage de l’ensemble cloche/support de cloche. Mais finalement, rien à signaler : le niveau de vibration à vide est parfaitement imperceptible, ce qui peut être qualifié d’excellent.
- Le contrôleur : les essais avec le Jeti-30-3P ont été très vite abandonnés, car il a beaucoup de mal à gérer ce moteur. Cela se traduit par un régime limité et une consommation excessive. Après l’acquisition d’un Castle Creation 25, excellent contrôleur s’il en est, les choses sont rentrées dans l’ordre. A noter que ce contrôleur a gardé la configuration d’origine, en particulier le timing moyen, parfaitement adapté.
- Les performances : elles sont tout simplement bluffantes,
comme l’indique le tableau de comparaison ci-joint. En effet,
que ce soit à 100 W ou à 200 W (puissance consommée
à l’entrée du contrôleur) le couple GWS EDF-55
et moteur AC-DIYMOT-VL surclasse très nettement toute la concurrence.
Si on rajoute le facteur prix, la comparaison est sans appel. De même,
la EDF-64 équipée de ce moteur domine les débats.
Elle s’incline juste en terme de poussée devant la Wemotec
480 équipée d’un Fun 400-28, qui bénéficie
d’une plus grande surface de rotor, mais se rattrape nettement
dès qu’on rajoute à la Wemotec un cône de
la même surface que celle balayée par le rotor de la EDF-64.
Et que dire des vitesses ? Voici un moteur à cage tournante qui
sort du lot : la plage de régimes testée va de 15 000
tr/min à 36 000 tr/min à pleine charge, sans le moindre
souci tellement ce moteur est à l’aise dans les très
hauts régimes. A croire qu’il a été conçu
pour cela...
Ce n’est pas indiqué dans les graphiques, mais j’ai poussé ces turbines et le moteur Aircraft dans les derniers retranchements... de mon banc d’essai : 286 W (14 V, 20,4 A) pour 550 g de poussée avec la EDF-64 et le bobinage 6 spires de triple fil Ø 0,3, et 248 W (13 V, 19,1 A) pour 470 g de poussée avec la EDF-55 et le même bobinage. Je n’ai pas pu aller au-delà par manque de puissance de mon alimentation, mais 20-21 A me semblent quand même la limite acceptable de ce moteur en continu. Dans le cas d’un usage court (motoplaneur de très hautes performances), il me paraît envisageable de passer au moins 25 A. Quant aux turbines GWS, leur potentiel au-delà de 248/286 W reste encore à explorer...
- Le rendement : à titre indicatif, n’étant pas encore satisfait de mes mesures, je peux quand même affirmer que le rendement de ce moteur est digne des meilleurs. Mes mesures indiquent, en moyenne, un rendement maxi de 85% pour tous les bobinages essayés, et un rendement d’environ 75% à la consommation maxi. Cela est confirmé par plusieurs points : tout d’abord, la comparaison des couples turbines/moteurs montrent que le couple turbines GWS / moteur Aircraft a un meilleur rendement global. Cela ne suffit pas à dire que les turbines GWS sont bien meilleures que les autres, ou que le moteur Aircraft vient de révolutionner le monde des moteurs brushless. Mais, logiquement, on peut conclure tout simplement que chaque élément de ce couple égale ou surpasse ses meilleurs concurrents. Et en l’occurrence, le moteur Aircraft a un rendement comparable ou meilleur à un Hacker, un Kontronic ou un Mega ; ce qui en soi n’est pas un mince compliment ! Autre indice du bon rendement, c’est la très faible température du moteur, quel que soit le bobinage. Avec les bobinages à base de 3 fils Ø 0,3, le moteur se stabilise à 50° vers 16 A de consommation, contre environ 20 A pour les bobinages à base de 4 fils Ø 0,3.
 Mesure du couple. Les essais en temps réel sont plus précis que les calculs. |
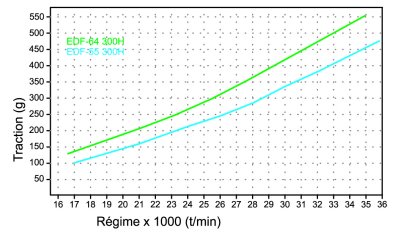
Une relation intéressante : si je n’ai
pas été surpris de trouver une correspondance précise
entre le nombre de spires du bobinage et l’intensité consommée,
je ne suis pas à même de la démontrer. En tout cas,
cette relation correspond à merveille à ce moteur. La
voici : conso (n spires) = conso (m spires) x (m/n)². Bien sûr,
elle n’est valable qu’à tension équivalente.
En voici un exemple : avec la EDF-55 et 8 spires de triple Ø
0,3, on a 7,1 A sous 11 V. Si on passe à 7 spires, toujours sous
11 V, cette relation donne 9,3 A (7,1 x (4/3)²) pour 9,3 A en réalité,
et 12,6 A calculés contre 13,1 A mesurés avec 6 spires.
On a donc des valeurs calculées assez fidèles à
la réalité. Dans la même logique, le passage de
3 fils à 4 fils a été regardé de près,
mais finalement il a une influence assez faible sur la consommation,
environ 7% de plus. C’est d’ailleurs pour cela que je n’ai
pas intégré dans les graphiques le bobinage 6 spires de
triple fil, car trop proche du 6 spires quadruple fil.
Voilà des données à mon avis très intéressantes
: en effet, je n’ai pas testé exhaustivement toutes les
possibilités de bobinages utilisables avec ce moteur. Par exemple,
une personne intéressée par le maximum de puissance avec
2 éléments Li-Po (soit environ 6-7 V en charge) ne trouvera
pas son bonheur dans mes essais. Mais connaissant la tension et l’intensité
(ici environ 20 A maximum), il devient facile de calculer le nombre
de spires adéquat. En l’occurrence, on a 11,4 A sous 7
V avec une EDF-64 et 5 spires de 4 fils de Ø 0,3. Si on passe
à 4 spires, cela fera 20,3 A. Evidemment, le remplissage en cuivre
sera moins bon, ce qui risque de légèrement faire chuter
le rendement. Cela implique alors de mettre 5 fils au lieu de 4.
Turbine
|
Moteur
|
Poussée
à 100 W |
Poussée
à 200W |
GWS
EDF-55-300 |
AC-DIYMOT-VL
|
265
|
400 |
Graupner
400 |
BL perso |
220 |
- |
Scorpio Fantex 240
|
Hacker B20-15L |
220 |
355 |
VasaFan 55 |
Model Motor AC 1215-16 |
245 |
- |
VasaFan 55 Model
|
Motor AC 1215-12
|
- |
370 |
Wemotec MicroFan
|
Razor 2500 |
250 |
- |
GWS
EDF-64-300 |
AC-DIYMOT-VL |
310
|
460 |
Scorpio Fantex 400
|
Kontronic FUN480-33 |
250 |
390 |
VasaFan 65 |
Kontronic FUN400-28
|
295 |
460 |
VasaFan 65 |
Mega AC 1615/2 |
- |
430 |
Wemotec MiniFan480
|
Kontronic FUN400-28 |
305 |
490 |
Wemotec
MiniFan480 + cône |
NPM Carbon 2447/8
|
260 |
450 |
Conclusion
Que dire de plus que tout ce qui précède ? En fait, un
simple condensé s’impose : une masse record de 39 g, 21
A possibles en continu soit un potentiel de presque 300 W (sous 14 V,
soit 4 à 5 éléments Li-Po), un rendement haut de
gamme, un prix très bas. Et ce qui ne gâte rien, ce moteur
est très facile à assembler. Ah oui, j’oubliais
: mon dernier X-Rush pèse maintenant 340 g avec une batterie
Li-Po 3S1P-1800 mA 12C. Avec ce fabuleux petit moteur Aircraft et une
GWS EDF-55, j’ai la bagatelle de 410 g de poussée. Dire
que le vol est balistique tient de l’euphémisme.
 L’ensemble turbine GWS-55 et le moteur bobiné comme l’indique l’article procure une vitesse assez phénoménale au X-Rush de l'auteur : 410 g de poussée sur un avion de 340 g. |
On a aimé
|
On a moins aimé
|
Contacter l'auteur : franck.aguerre@jivaro-models.org
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||