 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
| |
 |
DIYMot et DIYMot2207
|
 |

Je vous propose l’essai de deux moteurs brushless hautes performances en kit , à cage tournante, plutôt orientés hélices que turbines.
Le DIYMot est le premier moteur en kit de la gamme Aircraft World, et n’est plus disponible à la vente que sous forme de pièces détachées. Il est maintenant remplacé par le DIYMot-2207, à peine plus gros mais capable d’encaisser 45% de puissance supplémentaire à bobinage équivalent. C’est donc presque un comparatif de générations que je vous propose ici.
 Voici comment se présente un moteur en kit à assembler soi-même. Il s’agit ici de l’ancien DIYMot. |
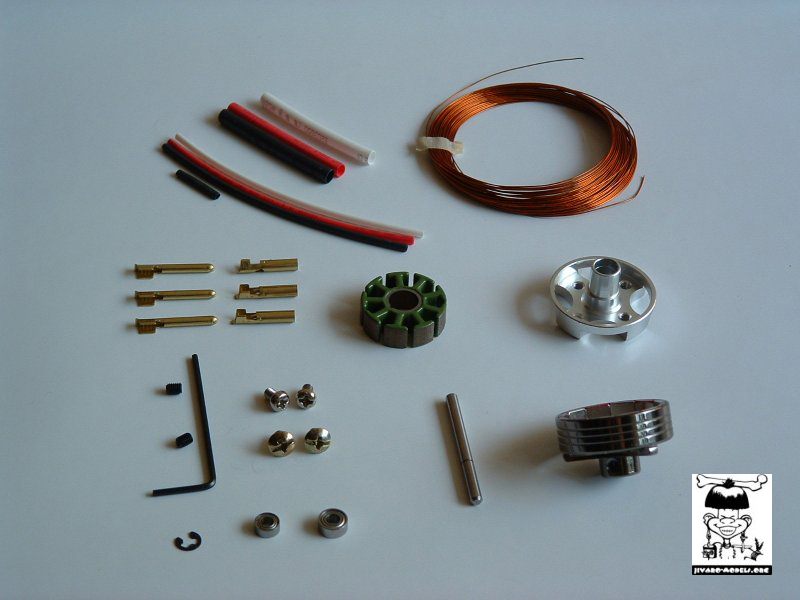 Le kit du DIYMot 2207 est bien sûr complet et constitué d’éléments de qualité. Pas de crainte, il suffit d’être attentif et de lire ces lignes (pas de notice livrée !) pour obtenir un moteur aux performances presque étonnantes. |
A la réception de ces moteurs, aucune surprise
pour les habitués de ce genre de kit : emballage plastique dépouillé,
mais kit très complet. La composition est quasiment identique
pour les deux moteurs :
- un flasque usiné en aluminium, recevant les roulements et le
stator
- une cage avec les aimants déjà en place
- 2 roulements à billes
- 1 arbre rectifié Ø 3
- 2 paires de vis de fixation
- le fil de cuivre émaillé Ø 0,3
- les connecteurs dorés Ø 2,4, mâles et femelles
- un ensemble de gaines thermo
Le DIYMot-2207 dispose en plus d’un circlip Ø 3, de deux
vis sans tête et d’une clé allen.
Description
Les deux moteurs sont de conception très proche, avec 12 aimants
occupant 100% de la surface de la cage. Ce n’est pas très
courant, les valeurs généralement utilisées sont
d’environ 80%, mais cela ne semble pas poser de problème
particulier avec ces moteurs. Ces aimants sont au néodyme, d’épaisseur
environ 1,5 mm pour les deux moteurs, et présentent une face
cylindrique pour épouser parfaitement le diamètre de la
cage, ce qui n’est pas courant non plus. Les stators, tous les
deux à 9 branches, diffèrent légèrement
entre les deux moteurs : celui du 2207 a pour dimension Ø 22x7
et est isolé par une laque, alors que son prédécesseur
fait Ø 20x5 et est isolé par deux flasques en plastique,
c’est un peu moins bien.
Quelques points les différencient un peu plus : en premier lieu
les couleurs, le 2207 fait l’économie de l’anodisation
de son flasque, et les cages ne reçoivent pas les mêmes
traitements, zingage noir pour le DIYMot et une sorte de nickelage pour
le 2207. En y regardant de plus près, on peut remarquer que le
2207 a été beaucoup plus travaillé dans un souci
d’allègement, au point de peser à peine plus que
son prédécesseur. Autre différence notable, c’est
la conception des parties tournantes : pour le premier moteur, les roulements
doivent être collés sur le flasque et l’arbre sur
le rotor, tandis que le second moteur est entièrement démontable
grâce à une cage tenue par deux vis sans tête.
 Pour ceux qui oseront se lancer dans le bobinage, de hautes performances sont à la clé avec ces petits moteurs japonais disponibles en kit. A noter en haut à gauche, le moteur équipé d’un réducteur. |
Par rapport au DIYMot-VL plutôt destiné aux turbines au niveau de réalisation excellent, la qualité des éléments est globalement du même niveau. Tous les éléments sont correctement usinés, et l’aspect des pièces est flatteur. J’ai juste un petit regret au niveau du 2207 sur lequel j’ai dû passer quelques coups de grattoir pour terminer l’ébavurage un peu sommaire. Autre bémol qui ne concerne que certains 2207 : les premières séries ont été livrées avec l’usinage du logement de roulement côté cage un peu trop serré. Pour ces séries, une note est d’ailleurs jointe dans l’emballage, demandant de passer du papier de verre dans l’alésage pour que le roulement ne monte pas trop en force.
Assemblage
Sans être complexe, l’assemblage de ce type de moteur demande
à suivre quelques règles pour en venir à bout sans
souci. En voici le détail.
Le choix du câblage
C’est la partie cruciale de l’assemblage du moteur qui conditionne
ses performances, au même titre que le soin apporté à
la réalisation proprement dite du câblage.
Le câblage se réalise toujours en deux étapes.
La première consiste en l’enroulement des fils de cuivre
sur chaque dent du stator, tandis que la seconde permet de relier les
fils entre eux et au contrôleur. Le sens d’enroulement des
fils est tributaire du nombre et de l’agencement des aimants (le
fameux N-S-N-S-...) afin d’avoir un enchaînement correct
d’attraction/répulsion entre les dents du stator et les
aimants du rotor. On choisit une section de fil (dans le cas de notre
moteur, un nombre de fils que l’on bobine ensemble en parallèle)
et un nombre de tours de fil en adéquation avec la destination
du moteur : plus de tours de fil et/ou fil plus fin donnent un moteur
fait pour tourner lentement, et vice-versa. De plus, il faut remplir
de cuivre au mieux chaque dent afin d’optimiser le rendement.
La seconde étape consiste à choisir le type de branchement
: étoile ou triangle. A enroulements équivalents, le second
donne un régime et une consommation très supérieurs
au premier, ou à contrario demande beaucoup plus de spires par
dent (donc très difficile à bobiner) pour garder un régime
équivalent au câblage étoile.
Dans le cas de ces moteurs Aircraft World, le branchement est systématiquement
réalisé en étoile, ce qui donne de bons résultats
avec des câblages faciles à réaliser. Au niveau
nombre de spires, les deux moteurs donnent des résultats similaires
avec environ 1,5 fois plus de spires sur le DIYMot que sur le DIYMot2207.
Ce rapport correspond à peu de chose près au rapport des
largeurs de stator (5 pour le premier et 7 pour le second). Par exemple,
le 2207 devra être bobiné avec 8 spires pour tourner les
même hélices que le DIYMot avec 12 spires.
Je n’ai pas testé une infinité de câblages,
mais ceux testés permettent de donner les grandes lignes :
| Moteur | Réducteur | Racer | Intermédiaire | 3 D |
| DIYMot | 7 à 9 spires,
3 fils, Imax = 20 à 15 A |
10 à 12
spires, 2 fils, Imax = 13 à 11 A |
13 à 15
spires, 2 fils, Imax = 11 à 9 A |
16 à
18 spires, |
| DIYMot-2207 | 6 spires, 4 fils,
Imax = 25 A |
7 à 9 spires,
3 fils, Imax = 20 à 12 A |
10 à 11
spires, 2 fils, Imax = 12 à 10 A |
12 à 14
spires, 2 fils, Imax = 10 à 8 A |
Je ne donne l’intensité maximale qu’à titre indicatif, car elle est extrapolée des bobinages essayés et non mesurée sur tous ces bobinages. Son calcul repose sur la puissance thermique que peut dissiper le moteur, fonction de sa masse et de sa surface d’échange thermique. Cette chaleur est issue en grande partie des pertes par effet joule dans les fils, une autre partie provenant des pertes par courant de Foucault dans le stator. Plus il y a de fils et moins la résistance interne est importante, et moins la puissance perdue par effet joule est importante. Idem avec le nombre de spires. Les bobinages à faible nombre de spires et grand nombre de fils en parallèle peuvent donc passer beaucoup plus de courant pour une taille de moteur donnée. En contrepartie, le moteur tourne aussi plus vite. C’est d’ailleurs pour cela qu’à masse égale, un moteur tournant très vite est potentiellement plus puissant qu’un moteur tournant lentement.
Le câblage en détail
Maintenant que la structure du câblage est établie en fonction
de la puissance désirée et au régime désiré
(se référer aux tableaux d’essais), passons à
l’application pratique. Voici la meilleure technique à
suivre (voir aussi le schéma fourni dans cet article) :
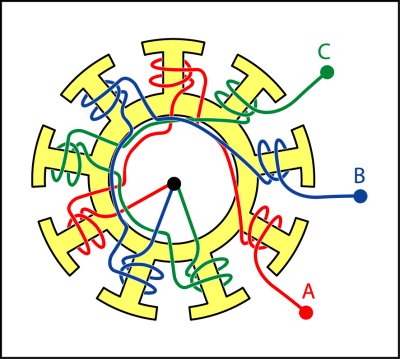
- Connaissant le nombre de fils à mettre et
le nombre de spires par dent, couper autant de fils que nécessaire,
en comptant 20 mm de fil par spire pour le 2207 et 15 mm pour l’autre.
Ne pas oublier de garder environ 100 mm de longueur supplémentaire
pour les terminaisons.
- Le bobinage commence par une dent choisie au hasard, en comptant bien
le nombre de tours. On commence toujours à bobiner la dent du
fond vers le haut de la dent en tassant le plus possible, puis on réalise
une seconde couche du haut vers le bas. En sortant de la dent, le fil
doit ensuite chevaucher le départ du bobinage, puis il rejoint
la 3ème dent suivante, toujours dans le même sens de bobinage.
Entre deux dents, il faut faire très attention de laisser un
peu de “mou” pour pouvoir ensuite insérer le stator
sur le flasque.
- Les 3 séries de fils sont bobinées exactement de la
même manière.
- On réalise ensuite la terminaison en étoile, appelée
aussi point central. Pour cela, il suffit de prendre les 3 fils de sortie
du câblage pour les torsader ensemble, puis de les souder à
environ 10 mm du stator. Avec le fil fourni, il faut pas mal chauffer
pour réussir à faire fondre le vernis. C’est un
peu laborieux, mais cette qualité de fil garantit qu’il
n’y aura pas de court-circuit interne si le moteur chauffe un
peu trop. La petite gaine thermo fournie dans le kit vient ensuite recouvrir
cette soudure pour éviter tout court-circuit.
 Le DIYMot démonté. L'anodisation était du plus bel effet. |
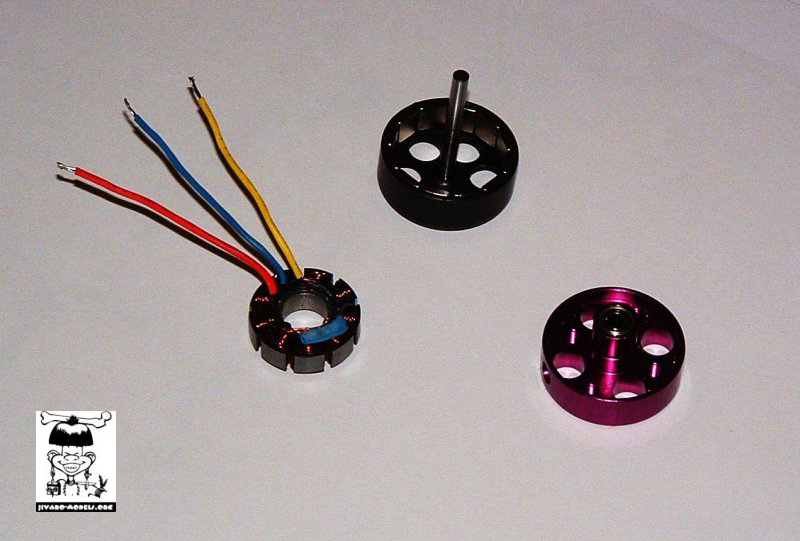
 Le DIYMot 2207 ouvert. On voit les aimants qui occupent toute la surface de la cloche, et le bobinage effectué avec beaucoup de soin. |
Montage final
On monte ensuite le stator sur le flasque, en passant les 3 fils d’alimentation
par l’ouverture adéquate. Le collage peut se faire à
la cyano ou à la résine anaérobie type Loctite
BlocPress. L’avantage de la cyano, c’est que le stator sera
démontable en chauffant le flasque avec un fer à souder.
A ce niveau, il faudra être très attentif avec le 2207
: un des moteurs essayé a eu un fil pincé entre l’épaulement
sur lequel vient se positionner le stator et le stator lui-même.
Cela s’est traduit par une consommation presque doublée.
La meilleure chose à faire pour éviter cela est de casser
l’angle vif de l’épaulement avec un papier de verre.
C’est dommage, cet épaulement est trop saillant, un simple
chanfrein à l’usinage n’aurait pas été
de trop.
On passe ensuite les gaines thermos sur les fils d’alimentation,
puis quelques gouttes de vernis à ongles sur le bobinage en cuivre
éviteront qu’il ne bouge avec d’éventuelles
vibrations. Choisir un vernis un peu souple, qui se déchirera
facilement le jour où vous déciderez de refaire le bobinage.
 Le moteur est très ajouré, ce qui offre à la fois un gain de poids et une bonne ventilation. |
 L’axe d’hélice est tenu par un circlip. La fixation du moteur ne peut se faire qu’à l’intérieur d’un fuselage, et non pas devant un couple comme sur de nombreux avions 3D silhouette. |
Dans le cas du 2207, il reste alors à monter
le rotor sur l’arbre, puis à serrer les deux vis allen.
Même si les arbres rentrent sans jeu sur le rotor, il vaut mieux
quand même serrer alternativement les vis allen de plus en plus
fort afin d’éviter tout défaut d’excentration
du rotor. A ce niveau, il faut faire très attention, la clé
fournie est de qualité très moyenne et ripe facilement.
Les roulements sont ensuite mis en place, puis l’équipage
arbre/cage est posé, sans oublier le petit circlip qui empêche
le roulement avant de partir.
Dans le cas du DIYMot, l’arbre est collé au Bloc-Press
sur la cage. A ce niveau, surtout pas de cyano ou autre, cela ne tiendrait
pas. Les roulements sont ensuite enfoncés dans leur logement,
avec une petite goutte de cyano pour les immobiliser (attention de ne
pas faire rentrer la cyano dans les roulements).
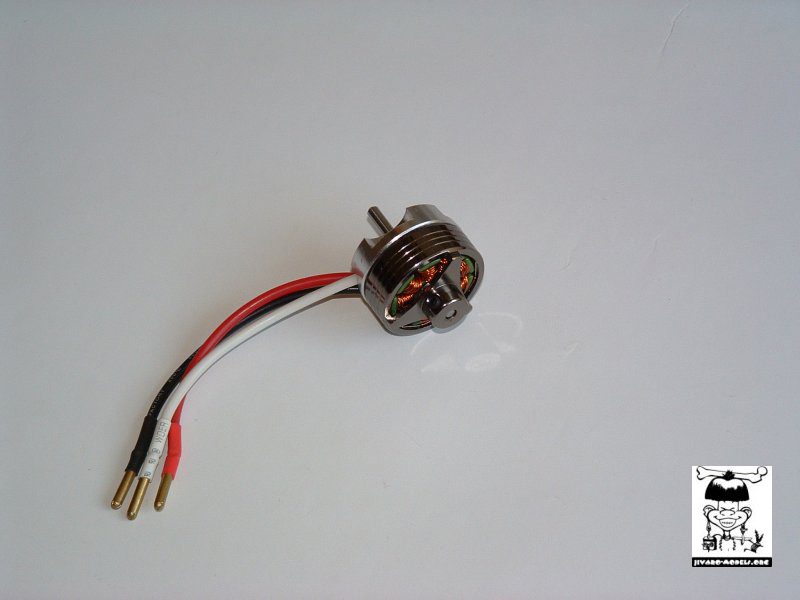
Et voilà, quel que soit le moteur monté, c’est tout
mignon ! Un passage à la balance nous donne un petit 31 g pour
le DIYMot et 36 g pour le DIYMot-2207, soit même pas la masse
d’un modeste Speed 280.
Les essais
Les mesures de tension et courant ont été confiées
à un Astro WattMeter, tandis que la traction a été
mesurée sur banc. L’alimentation est un modèle de
labo. Les contrôleurs utilisés sont les Phoenix 10 et 25
pour le DIYMot, tandis que j’ai utilisé les Hyperion 10
et 20 pour le 2207.
Les moteurs ont été bobinés de manière à
tourner une même hélice au même régime, cela
facilite nettement la comparaison. En l’occurrence, en terme de
régime de rotation, le DIYMot 12 spires est proche du 2207 avec
8 spires (9 spires auraient été mieux), et le DIYMot 16
spires est très proche du 2207 avec 12 spires. Un moteur a aussi
été réalisé à partir de pièces
détachées de DIYMot, avec un tube et flasque perso (à
base de tube hydraulique Ø 6x8 et de plaque époxy 20/10),
avec un bobinage 7 spires de 3 fils. Ce moteur a été essayé
sur une turbine GWS55, avec des résultats corrects, mais un peu
moins bons qu’avec le DIYMot-VL.
Le fonctionnement global
Plusieurs heures d’essais n’ont révélé
aucune défaillance ni prise de jeu sur tous les moteurs. Le niveau
de vibrations à vide est parfaitement imperceptible, ce qui peut
être qualifié d’excellent.
Les contrôleurs
Avec les deux types de moteur, les Phoenix et Hyperion ont été
utilisés avec leurs réglages par défaut. Dans les
deux cas, le fonctionnement est parfait. J’ai quand même
fait quelques relevés avec plusieurs moteurs équipés
des Phoenix puis des Hyperion. Le résultat est à l’avantage
des Hyperion, avec un gain de rendement de 2%. Surprenant, quand on
sait que ces contrôleurs sont nettement moins chers que les Phoenix.
Autre avantage de ces contrôleurs, j’ai trouvé que
les paramètres par défaut donnent un peu plus de punch
aux moteurs que les Phoenix.
 Les contrôleurs Hyperion essayés avec ces modèles sont apparus très fiables. |
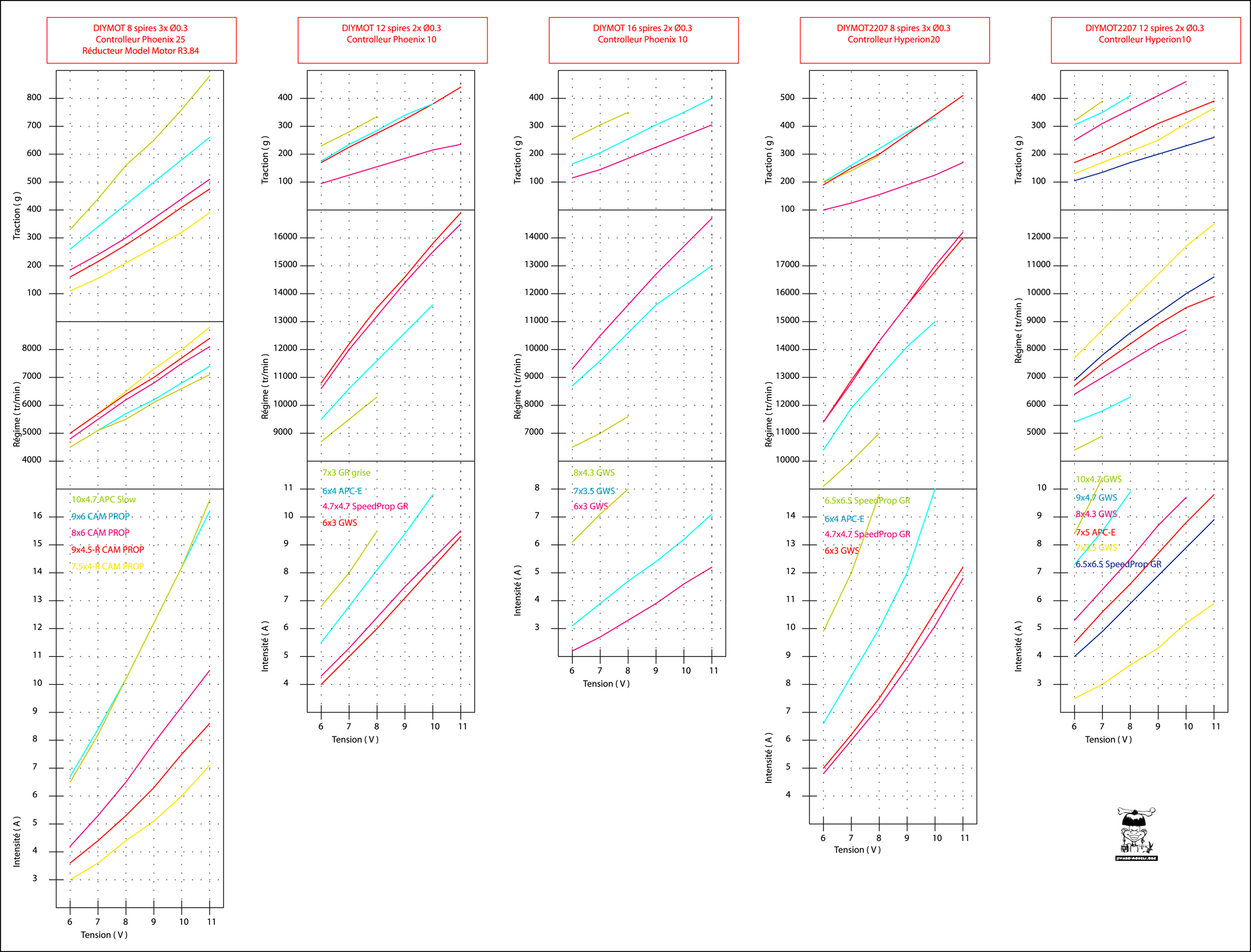
Les performances
Les courbes de performances vous permettront de facilement choisir le
bobinage et l’hélice adaptés en fonction de votre
accu et de votre modèle. Ceci dit, j’ai voulu aller plus
loin, c’est pourquoi j’ai regroupé dans le tableau
ci-contre quelques comparaisons significatives avec des moteurs du commerce
couramment utilisés. Pour cela, j’ai choisi des points
de fonctionnement de plusieurs hélices, en regardant la consommation
de chaque moteur pour arriver à chaque point. Les valeurs sont
tirées soit d’essais sur mon banc, soit du site www.flyingmodels.org,
qui fait référence en la matière. En voici un petit
débriefing :
Avec une charge faible (hélice 6”x3”, ou 6”x3”
à faible puissance), le DIYMot fait jeu égal avec un Hacker
B20-18L, tandis que le DIYMot2207 est légèrement à
la traîne. Dès que l’on charge un peu plus, le 2207
rejoint le Hacker en dépassant le DIYMot, puis se fait légèrement
distancer au-delà. Pas de quoi rougir, surtout quand on compare
à d’autres moteurs. Chose surprenante, deux moteurs plus
haut de gamme que la moyenne de leur catégorie, le Mini AC16/15-12
et le Graupner Speed 480 BB Race, sont de vrais lanternes rouge, ou
plutôt de gros consommateurs d’électrons.
Avec des bobinages plus lents et des hélices plus grandes, les
deux moteurs DIYMot tiennent la corde face à un Typhoon 6/2014
ou un SMT700, qui sont deux moteurs de qualité. Et dès
que la puissance demandée augmente, le SMT se fait complètement
distancer.
Dernière comparaison, le DIYMot réducté donne exactement
les mêmes résultats qu’un Typhoon 15/10 avec une
puissance énorme pour la taille : plus de 180 W pour un moto-réducteur
de 56 g, c’est assez incroyable.
 Difficile de croire que les performances de ce petit brushless sont comparables à un “énorme” 480. Et pourtant ! |
Globalement, les deux moteurs DIYMot se défendent
très bien, et présentent d’excellentes performances.
Généralement, le DIYMot se montre plus à son avantage
avec de petites hélices à faible pas. Quand la charge
augmente, le 2207 prend l’avantage, et accepte de délivrer
des puissances bien plus élevées avec un excellent rendement.
Les rendements de ces deux moteurs sont proches, de 75 à 85%
suivant la puissance demandée. Par contre, ils délivrent
leur meilleur rendement à des courants très différents,
de l’ordre de 40-50% plus élevé dans le cas du 2207.
En utilisation turbine, je n’ai pas jugé utile de faire
un graphique, car le DIYMot-VL se montre bien plus adapté à
cet usage. Par exemple, sous 10 V avec une GWS55, le DIYMot-VL avec
6 spires de 4 fils Ø 0,3 donne 310 g de poussée sous 12,2
A, alors que le DIYMot donne 290 g sous 14,7 A. C’est encore mieux
que certains brushless du commerce, ce qui rend quand même intéressant
ce moteur avec une GWS55 dans le cadre d’une recherche de masse
minimale, avec un gain de 8 g par rapport au DIYMot-VL.
L’installation
La fixation des ces moteurs est identique, sur le flasque pour les deux,
avec 2 paires de taraudages sur des diamètres différents.
J’ai trouvé cependant le 2207 moins pratique que son collègue
dans le cadre d’une fixation type shock-flyer, c’est-à-dire
cage côté hélice. En effet, il suffit de coller
l’arbre du DIYMot à la bonne position pour le rendre compatible
avec ce mode de fixation, tandis que l’arbre du 2207 n’est
pas réversible à cause de la gorge du circlip. On peut
refaire une gorge à la bonne position avec un disque à
tronçonner monté sur une mini-perceuse, mais cela n’est
pas évident à réaliser correctement.
  Le motoplaneur 12Plus de l’auteur, petit hotliner, est motorisé par un DIYMot réducté 3,84:1. Ca grimpe aux arbres avec une hélice 11”x8”. |
Les modèles
Ces moteurs peuvent allègrement se monter sur des modèles
destinés à des moteurs ferrites jusqu’au format
480. L’économie de poids sera très importante, un
480 pesant en moyenne 100 g, et le rendement et la durée de vie
sont bien meilleurs. Bref, l’éventail d’utilisation
est très large, du parkflyer tranquille au racer en passant par
les incontournables indoor 3D. Personnellement, j’ai mis en place
ces moteurs sur 3 appareils :
- 12Plus (perso) : Motoplaneur de perfo. Ses caractéristiques
sont les suivantes : envergure 120 cm, longueur 76 cm, surface 12 dm²,
masse 450 g. Motorisé par le DIYMot réducté avec
une hélice 9”x4,5” et un Li-Po 1500-3S, le taux de
montée est excellent, avec une pente à 45°. Avec des
Li-Po 2200-3S et une hélice 11”x8”, les montées
deviennent parfaitement balistiques et verticales, avec des temps moteur
de quelques secondes à peine.
- Stinger (Topmodel) : Equipé du 2207 avec 8 spires, une hélice
Graupner 4,7”x4,7” et un Li-Po 2200-3S, le gain de masse
est tel qu’il a fallu mettre 50 g de plomb sous l’accu,
pourtant avancé au maximum, presque contre le moteur. La masse
tombe à moins de 500 g, et le vol est extrêmement dynamique,
avec de très bonnes performances verticales. Un régal.
- Tucano (HET-RC) : cette adorable petite maquette a été
montée avec le DIYMot bobiné en 12 spires. Avec une hélice
6”x4” et une Li-Po 1200-3S, le bidule monte presque à
la verticale et se transforme en véritable petit racer. La gestion
des gaz est indispensable, le meilleur agrément de vol se situant
entre le tiers de gaz et le mi-gaz.
- De son côté, Laurent (notre cher rédac chef) a
testé avec succès le DIYMot en 16 spires sur un avion
de voltige 3D, en l’occurrence un Reflex de NPM.
Conclusion
J’ai trouvé ces moteurs très intéressants.
Peu onéreux, bien conçus, assez faciles à assembler,
ils offrent des performances de bon niveau pour une très faible
masse. La possibilité de choisir son bobinage permet une grande
souplesse d’utilisation. Comme prévu, le 2207 est capable
de passer plus de puissance que son prédécesseur, mais
ce dernier reste très intéressant pour de petites hélices.
Les contrôleurs Hyperion m’ont aussi convaincu, avec un
rapport qualité/prix très intéressant.
On a aimé
|
On a moins aimé
|
Contacter l'auteur : franck.aguerre@jivaro-models.org
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||