 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
Cloud Seeker RC
Cerf-volant sans fil ! (Traction vectorielle)
Texte et photos : Patrick Blanc
Depuis pas mal de temps, des personnes m’ont demandé des renseignements sur mes trucs qui volent ! Laurent m’avait demandé il y a bien longtemps si je voulais faire un petit descriptif des méthodes de fabrication de mes cerfs-volants motorisés, maintes fois repoussé plus par négligence que par mauvaise volonté. L’occasion de reconstruire l’engin que j’utilise le plus a été un bon point de départ pour mettre en forme un petit article bien loin du balsa, Dépron, EPP et autres matériaux plus classiques.
 |
Les infos diffusées
ici vous permettront de réaliser ce Cloud Seeker. Le pilotage d'effectue avec la dérive intégrée dans la cellule et le moteur, inclinable pour la profondeur, et bien sûr la commande des gaz. |
J’ai pensé que le plus simple était de vous faire suivre pas à pas, du dessin au vol, toutes les étapes. Depuis plus de 20 ans, je suis tombé dans cette discipline qui n’existait pas, le monde extra des cerfs-volants radiocommandés.
Avec l’aide de mon compère Raymond, Président du Cerf-Volant Club de Provence, le point de départ a été lors d’un de ses passages sur mon lieu de travail avec un train de cerfs-volants - plusieurs fois le même modèle relié sur la même ligne. J’en ai profité pour lui en subtiliser un en lui disant que cela devrait super bien voler radio commandé. Je vous laisse imaginer les réflexions…
Une quinzaine de jours après, le premier modèle volait et même plutôt bien. Il a fallu combattre les réflexes de vieux modéliste pour plonger dans autre chose et je garde en mémoire la première réflexion de Raymond, qui pour moi était le plus beau compliment possible : "Tu as réussi où les précurseurs se sont arrêtés. C’est le rêve de Cody que tu as réalisé !" |

Le Coud Seeker de
2,50 m tractant une banderole. |
 |
 |
|
| L’escadrille des minis : Le micro 25 cm d’envergure et 40 g. Celui-là, son histoire vaut la peine : équipé avec un récepteur en 41, je le fait voler derrière l’atelier, monter, balader et au moment de le faire descendre plus de commande à la radio et il monte, il monte et disparait dans le ciel intégralement bleu ! Je l’entends mais pas plus. Perdu ! Je vais à la maison et dans le doute je prends les jumelles et le cherche en l’air et miracle je le vois en train de spiraler en descente ! Je part avec le GPS à la main et le retrouve posé sur le nez au milieu d’un troupeau de moutons ! Le quartz s’était barré. | ||
 |
 |
|
| Le proto : tellement stable qu’il a été impossible à motoriser et surtout à diriger. Il n’a toujours pu voler qu’en ligne droite malgré bien des efforts pour le faire tourner. Par contre, en cerf-volant pur, il vole par 100 km/h de vent sans aucun souci. | ||
Un zeste d'histoireSamuel Franklin Cody fut, avec beaucoup d’autres, un de ceux qui ont essayé de transformer la rêverie du vol en réalité, (ce n’est pas Buffalo Bill). Pour ceux que ça intéresse : cerfvolantancien.free.fr Un d’entre eux a été un visionnaire et un expérimentateur de talent : Lawrence Hargrave, qui au 19e siècle a jeté les bases du vol. ctie.monash.edu.au (Site en anglais mais les dessins et photos se comprennent facilement). |
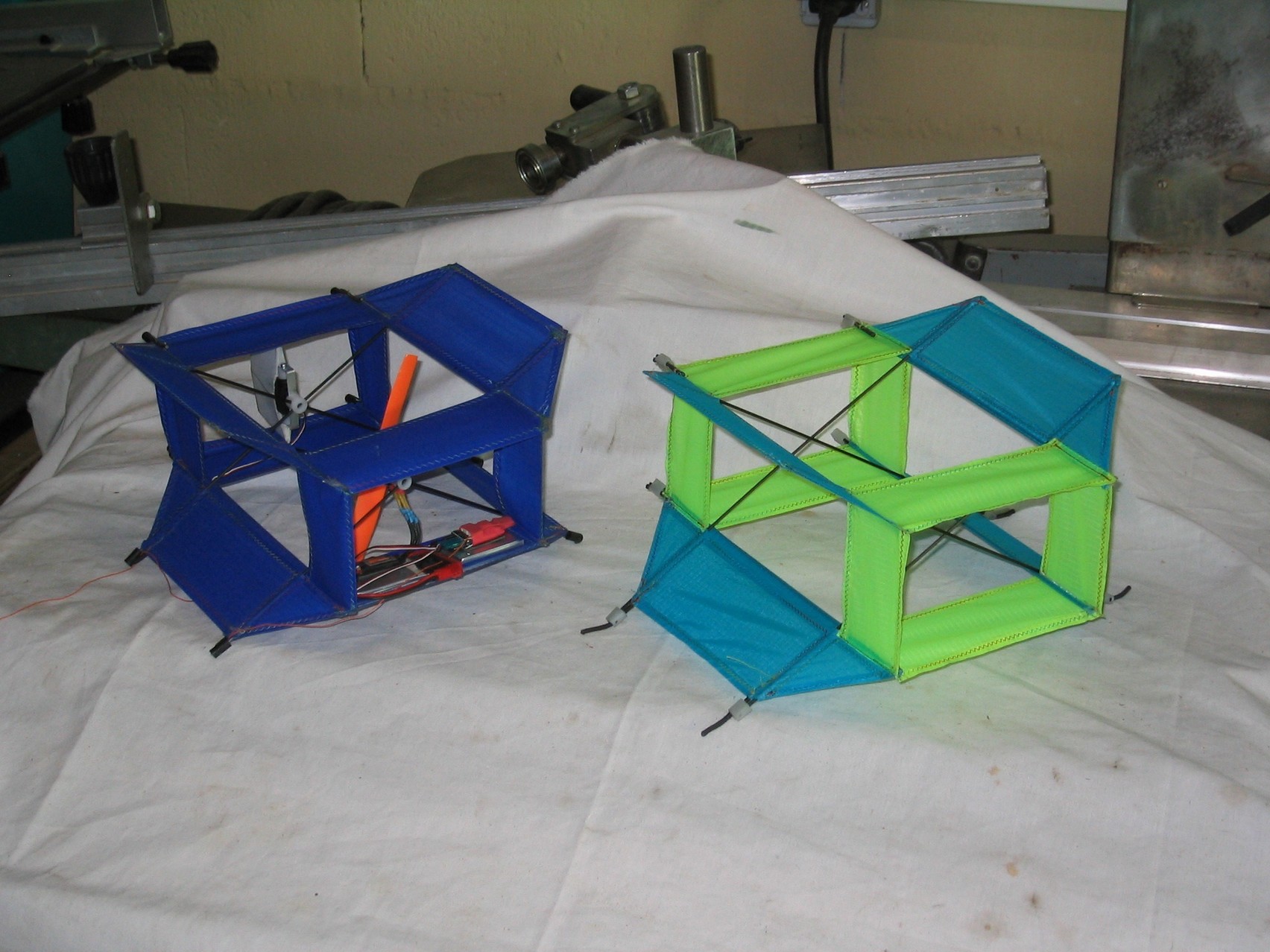
Le modèle proposé ici, le Cloud Seeker (chercheur de
nuages !) est un modèle basique de cerf-volant caisson avec d’excellentes
qualités de vol et surtout pratiquement totalement indestructible.
Il permet d’expérimenter tout ce qui peut vous passer dans
la tête.
Les dimensions sont faites pour utiliser des longueurs de tube de carbone
standard en 1 mètre de long, diamètre 6 mm, afin de minimiser
les chutes.
Tout le matériel se trouve facilement sur le Net chez des vendeurs
spécialisés. Nous nous servons chez E-Kite
(pub gratuite) pour les tubes carbone et embouts.
Un point important : il faut savoir que le tube carbone est très
abrasif et perfore facilement la toile de spi. Il faut prévoir
des embouts de protection ou simplement tremper le bout du tube dans
de la colle époxy.
-
Le matériel : toile de spi et tubes de carbone (ou fibre de verre)
-
Outillage : Fer à souder pour la découpe des panneaux, machine à coudre avec soit point droit, soit zigzag ou multipoint.
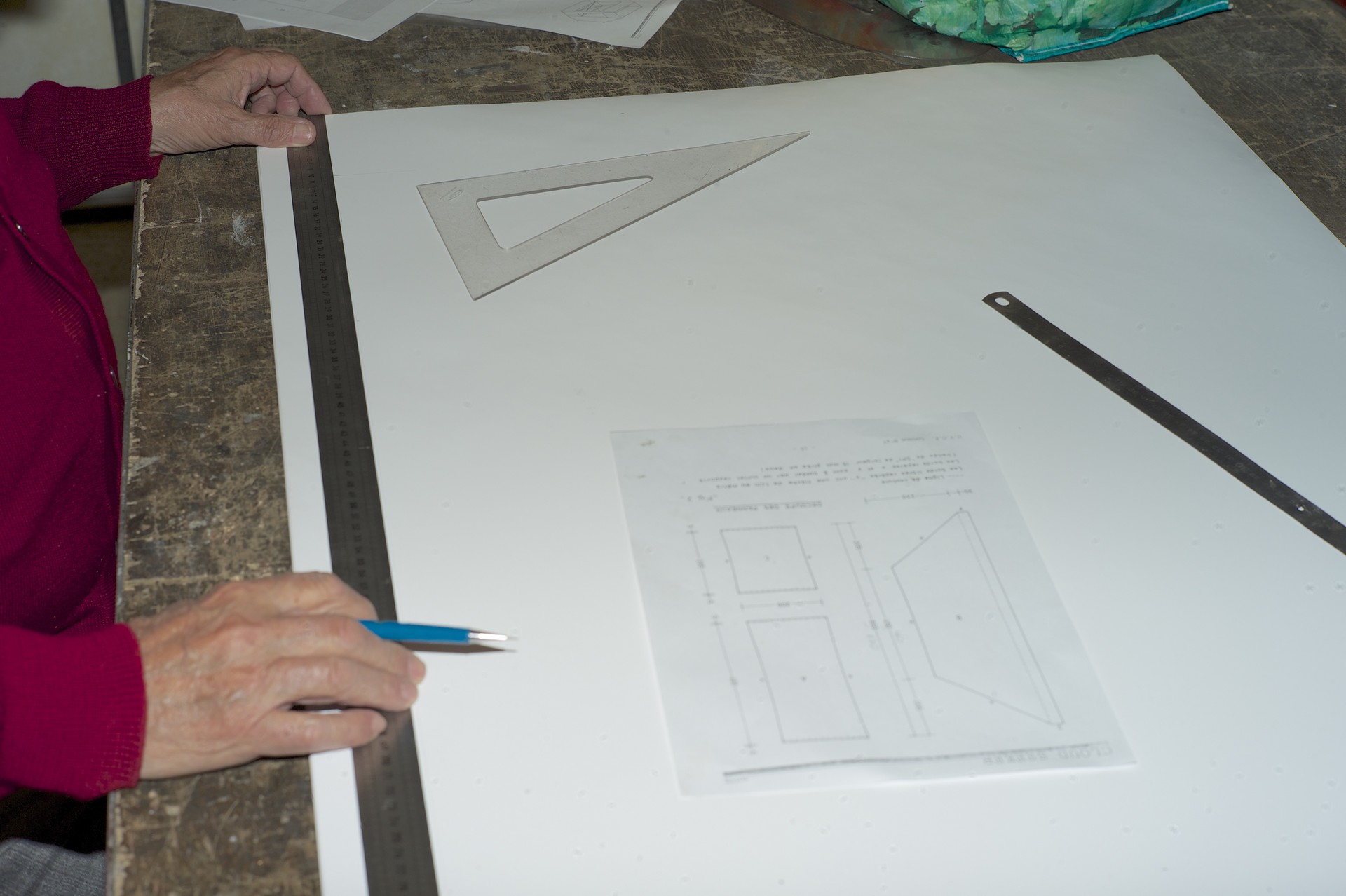
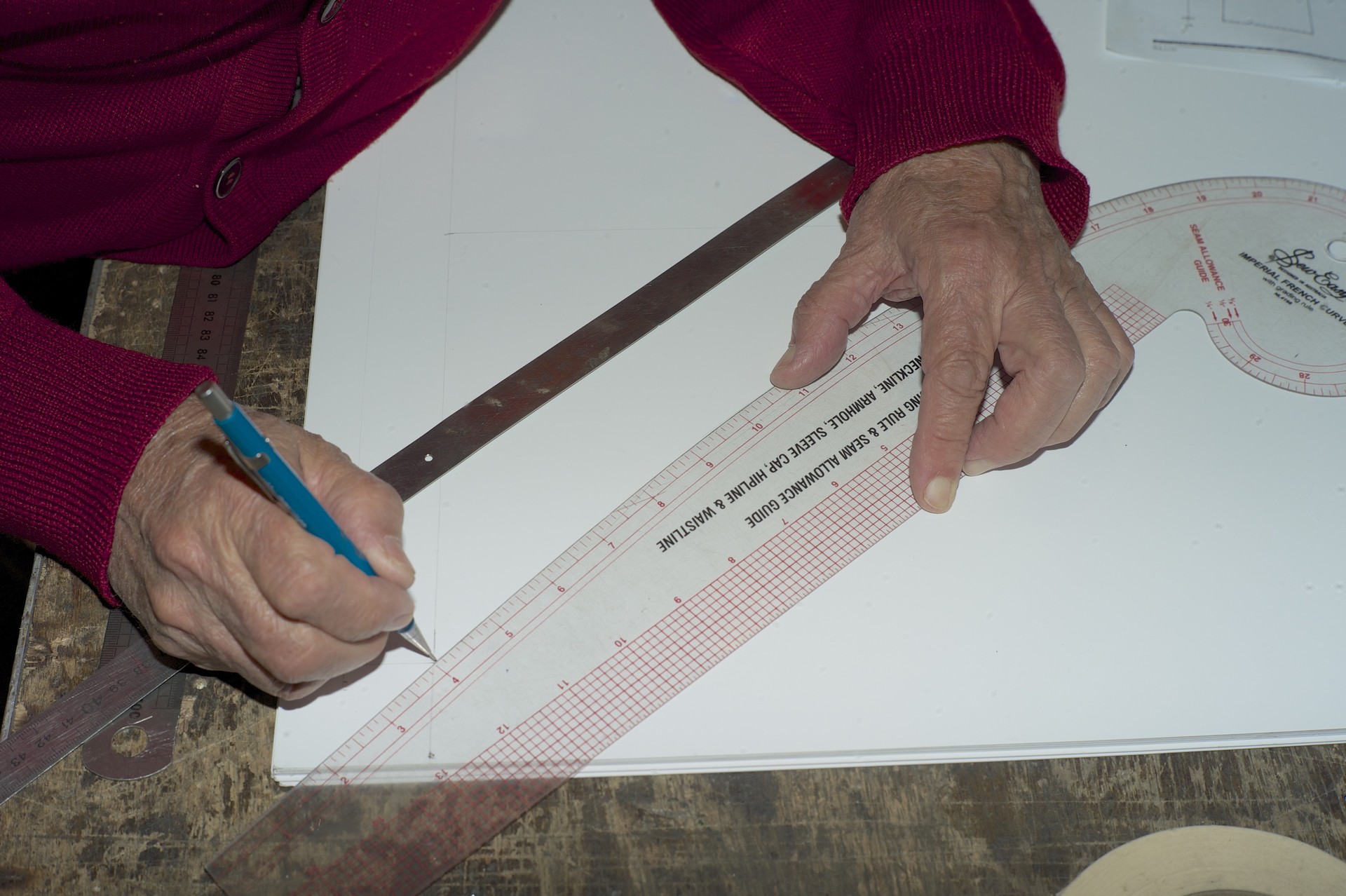
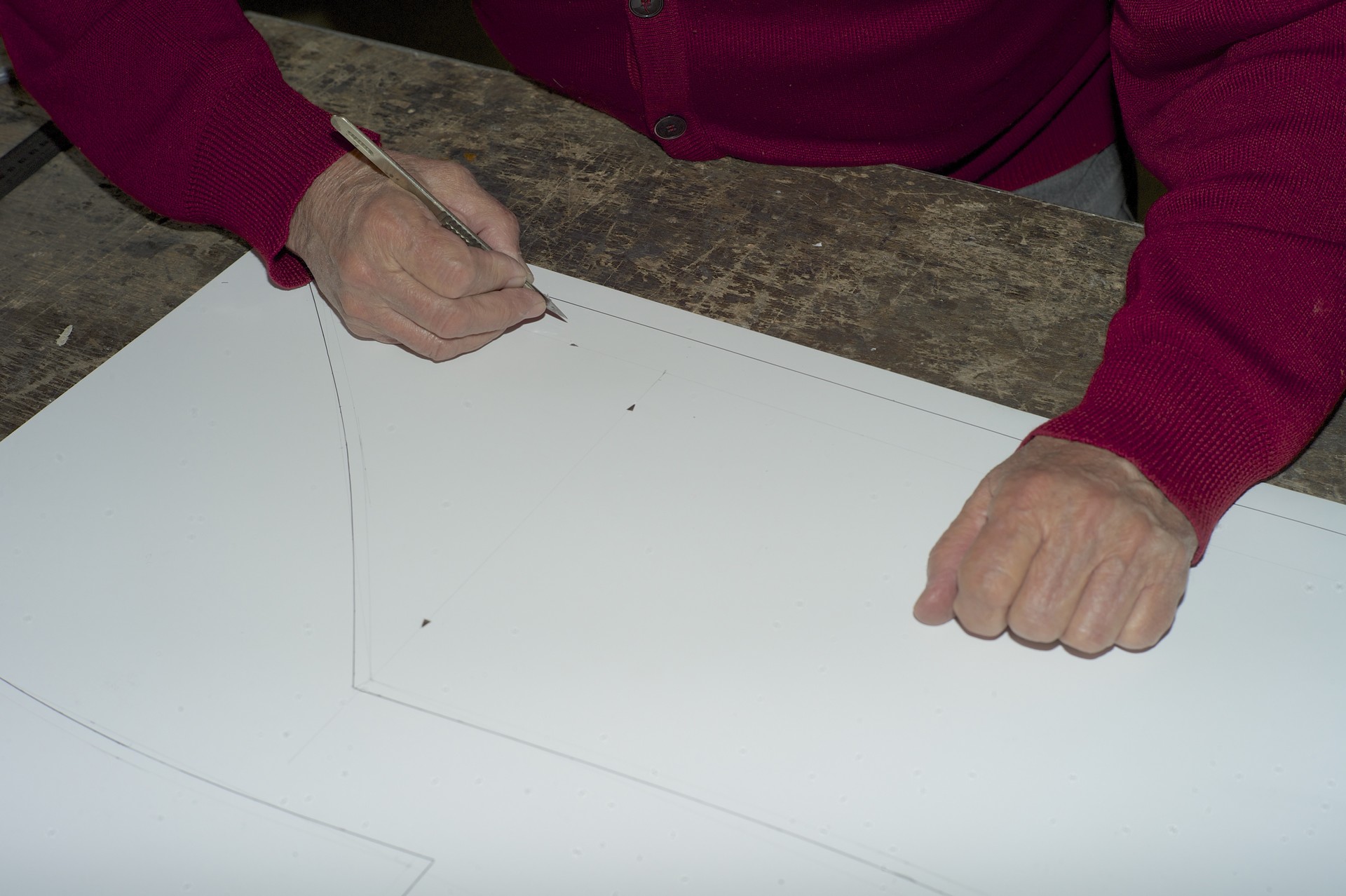
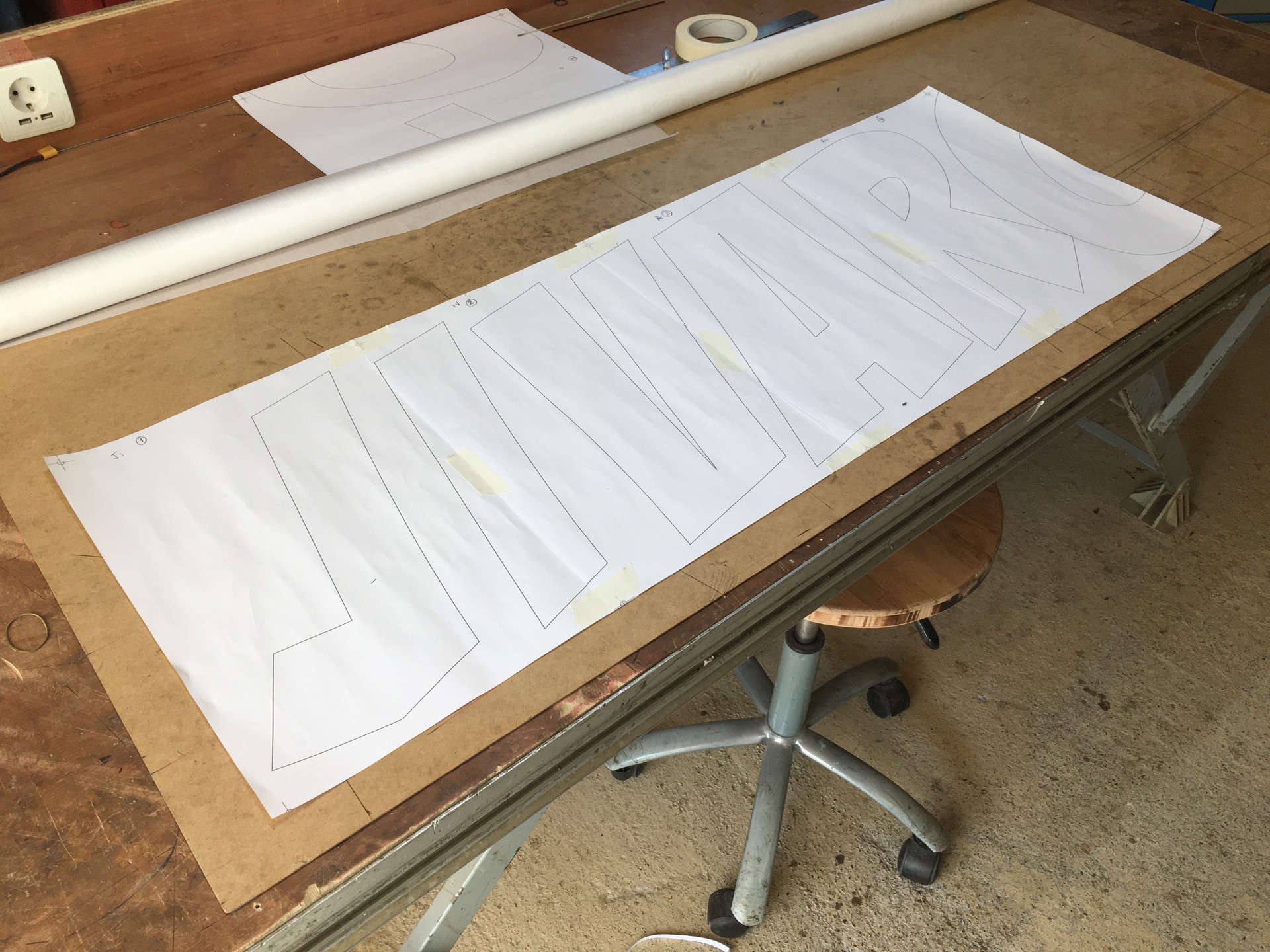
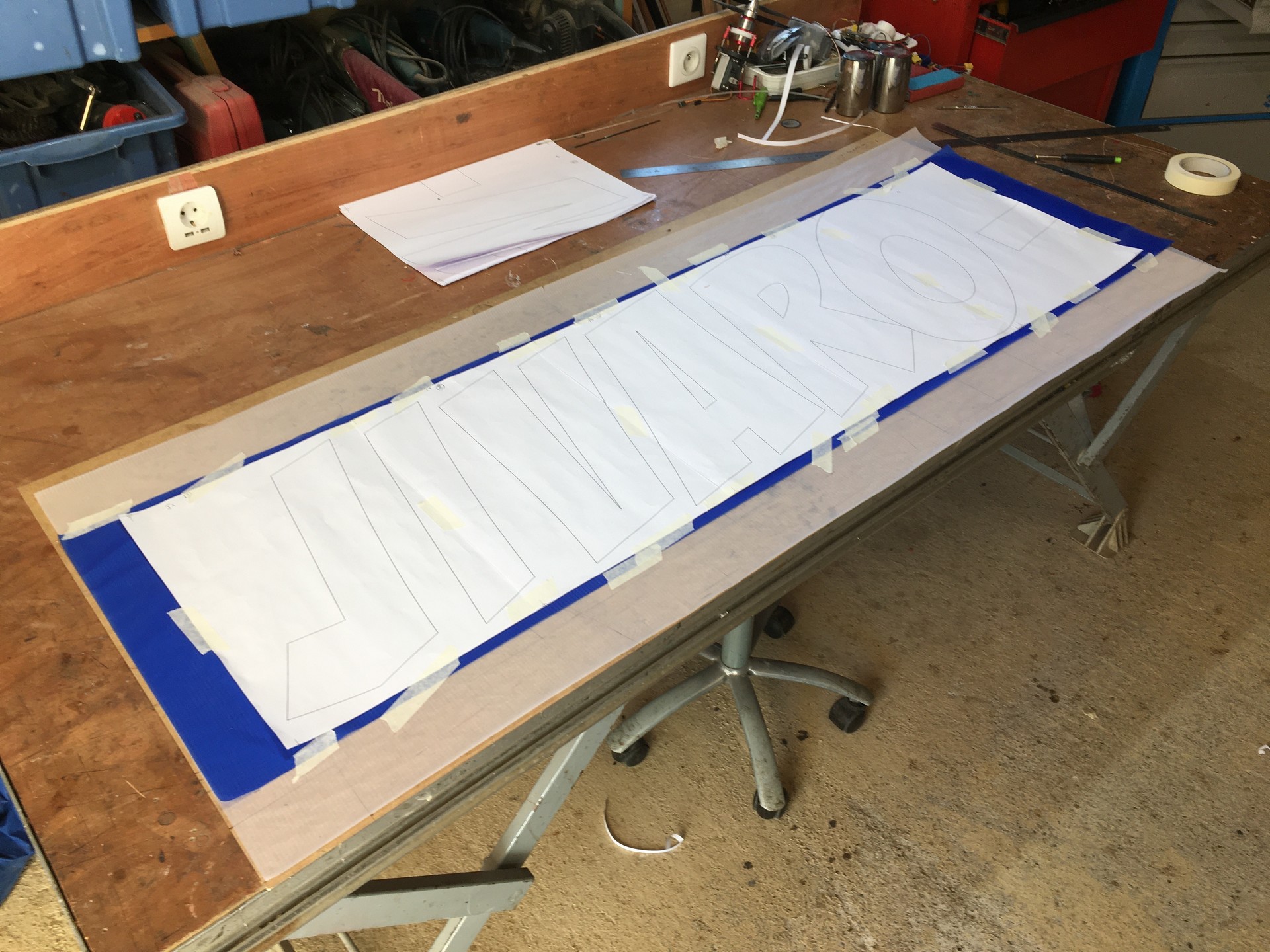
Traçage |
 |
 |
|
 |
 |
|
 |
 |
|
 |
 |
|
On commence à
tracer les gabarits sur du carton mince, se sera plus aisé
pour la découpe du tissu. |
||
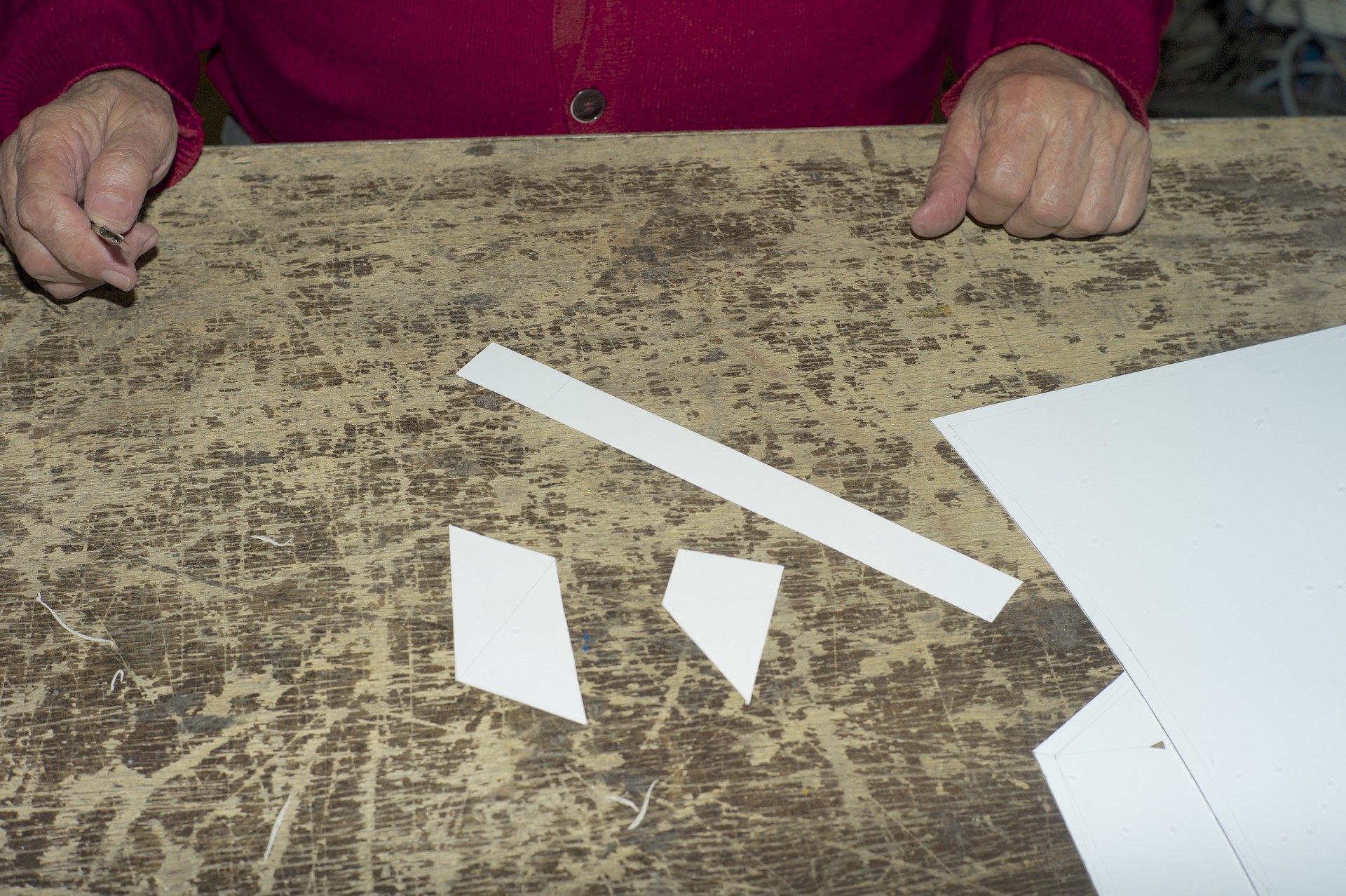
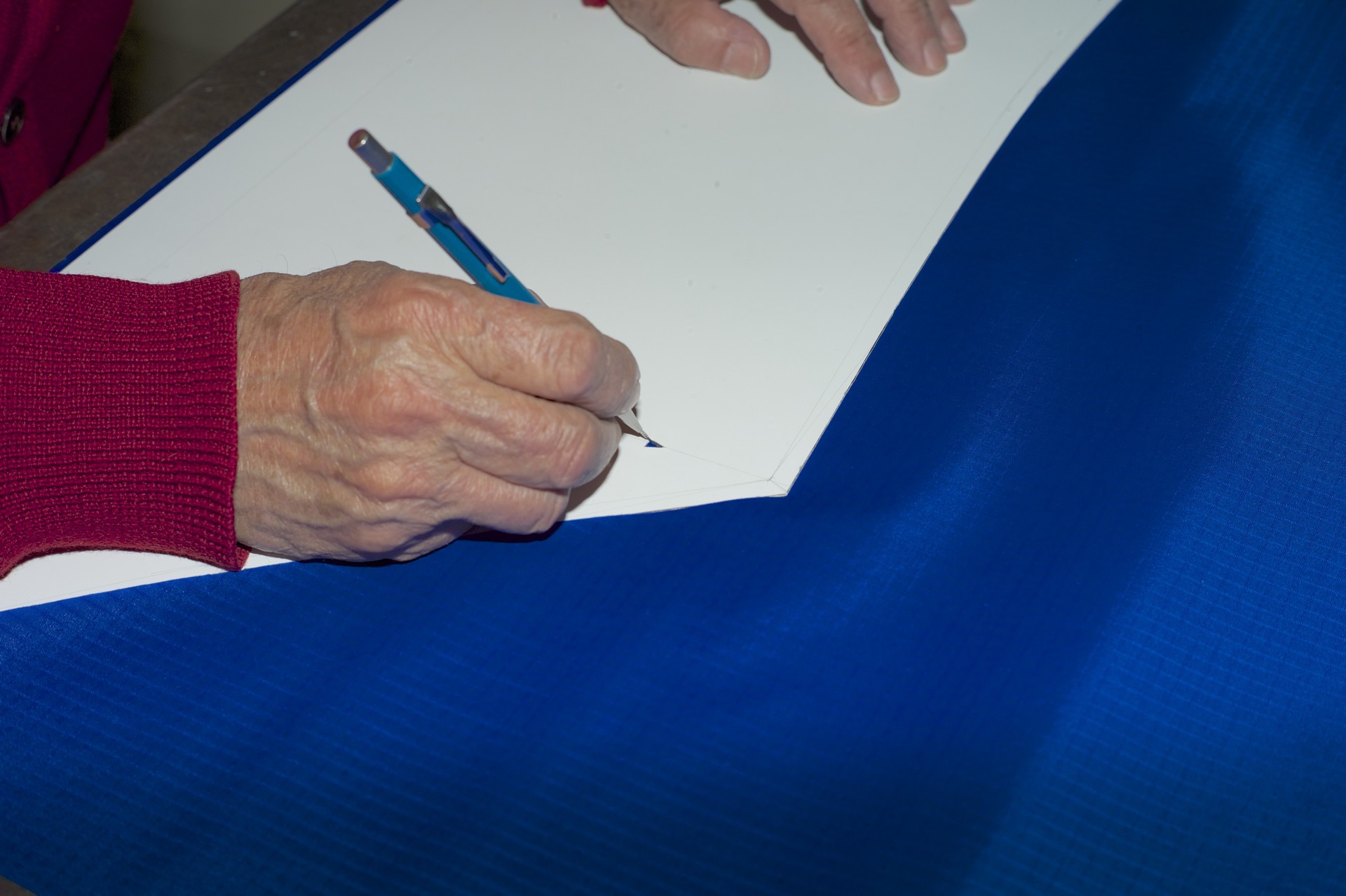
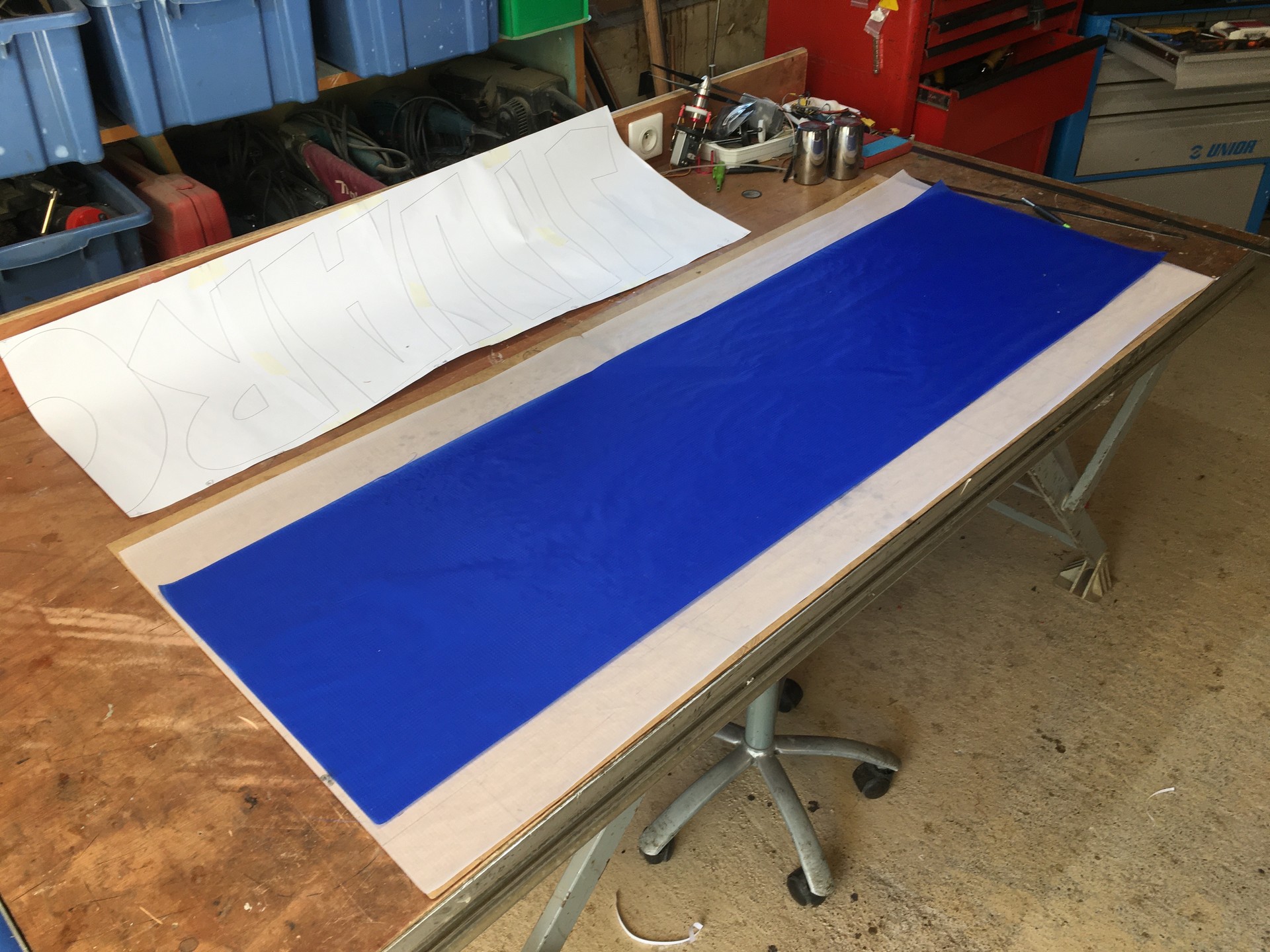
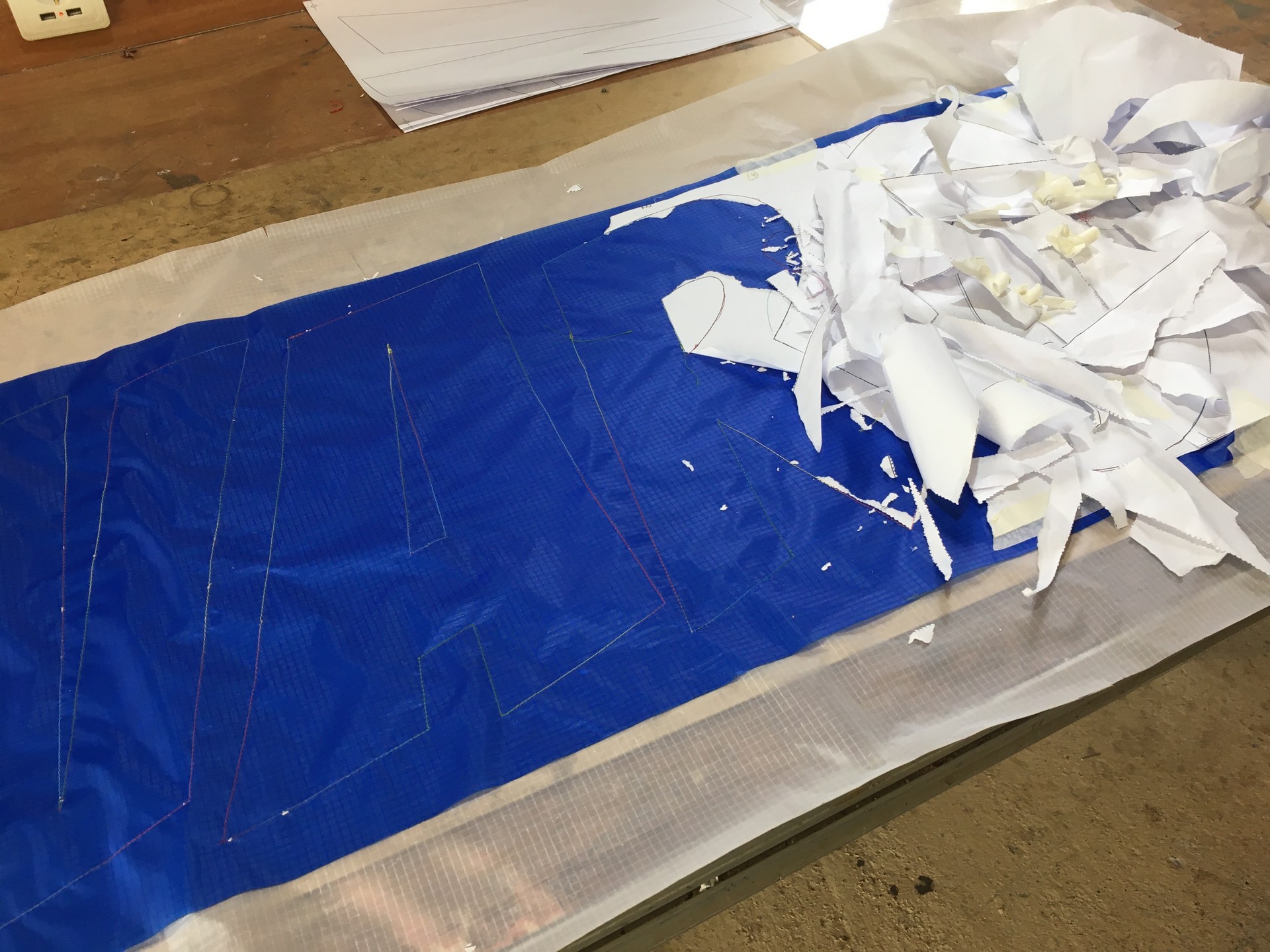
Découpage |
 |
 |
|
 |
 |
|
| La découpe du tissu de spi se fait idéalement avec un fer à souder à panne fine ou une panne spéciale prévue pour couper des cordages (pas obligatoire). | ||
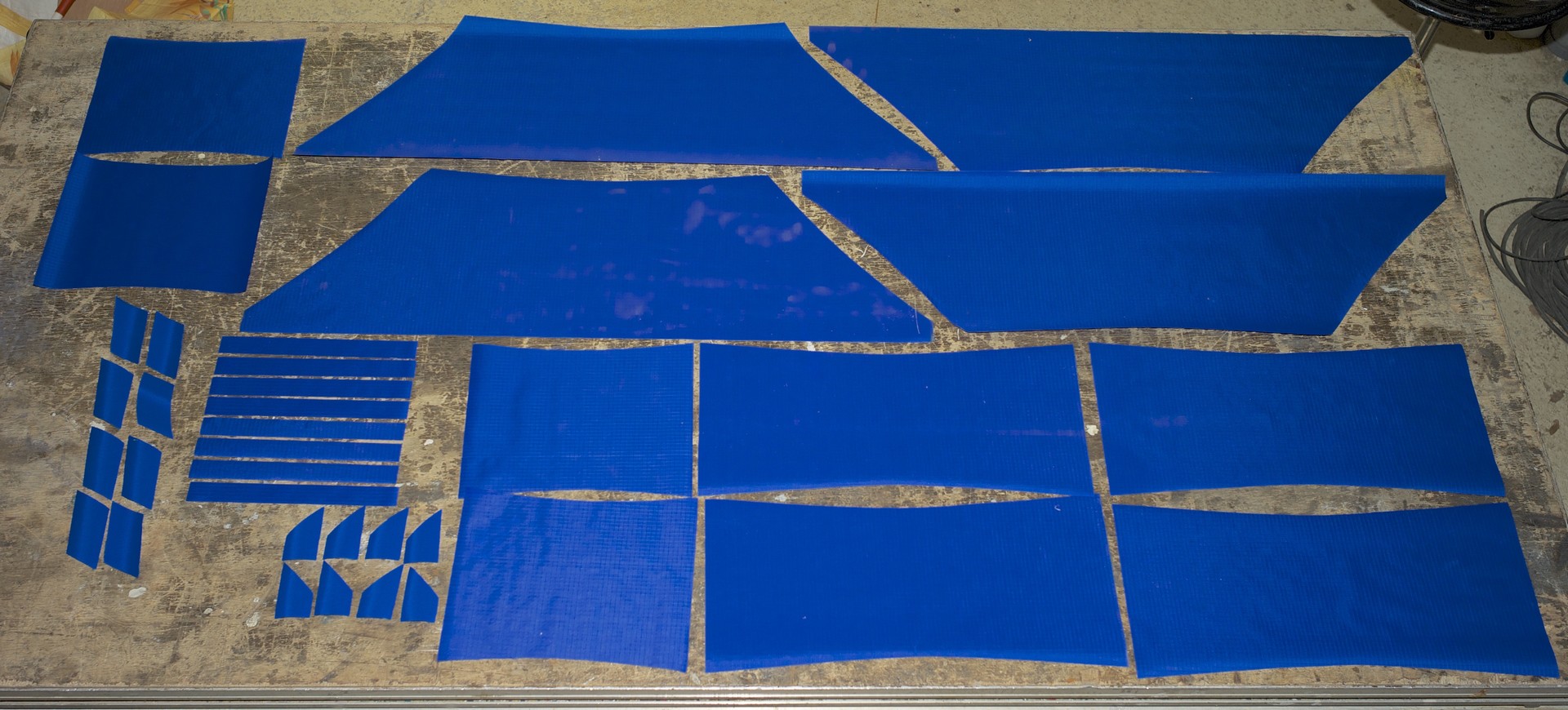 |
L’ordre de l’ensemble
des morceaux disposés afin de minimiser les pertes. |
| Fabrication
des ourlets
|
 |
 |
|
 |
 |
|
 |
 |
|
 |
 |
|
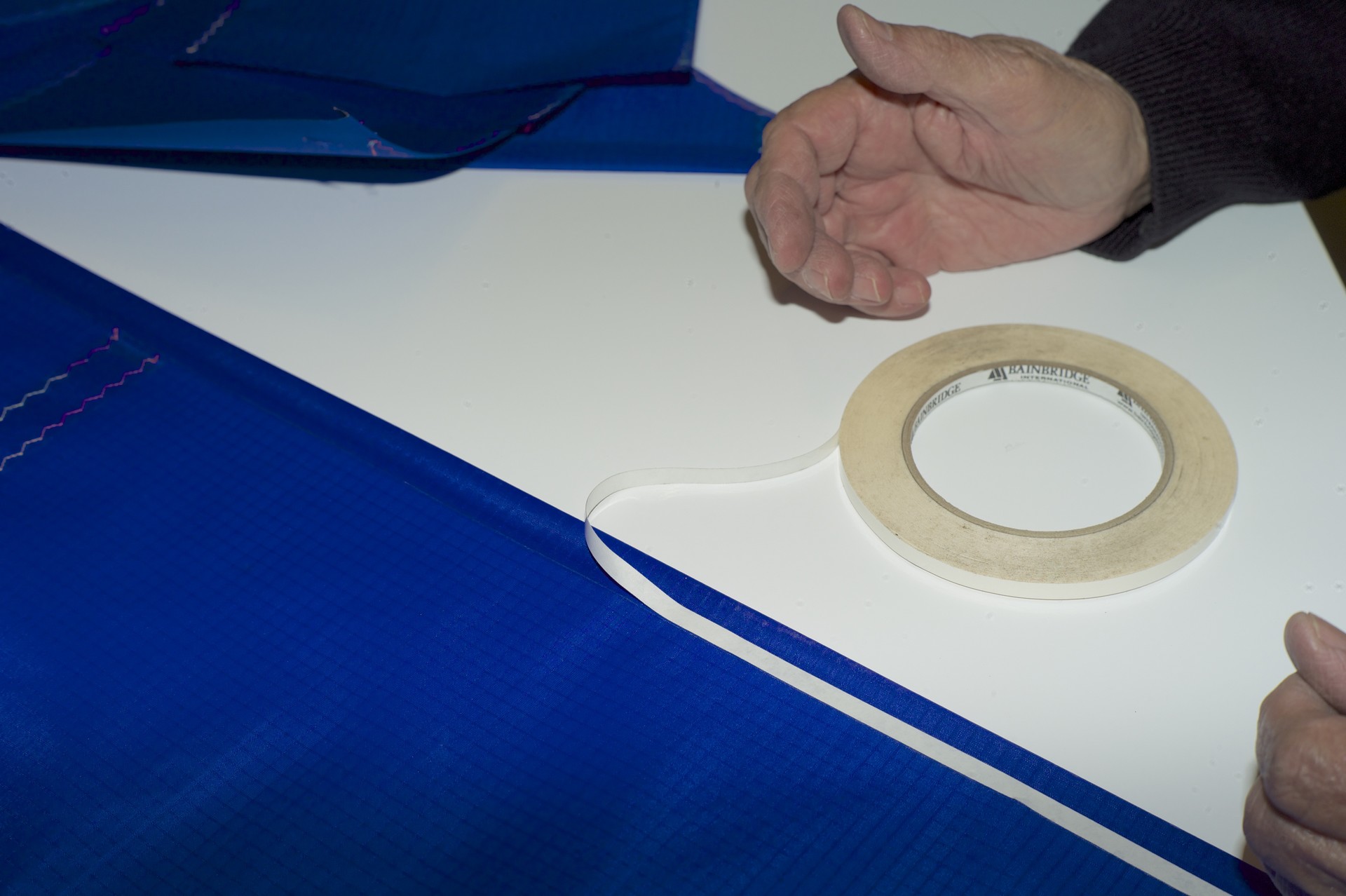
Pose de l’adhésif
double face pour constituer les ourlets. |
||
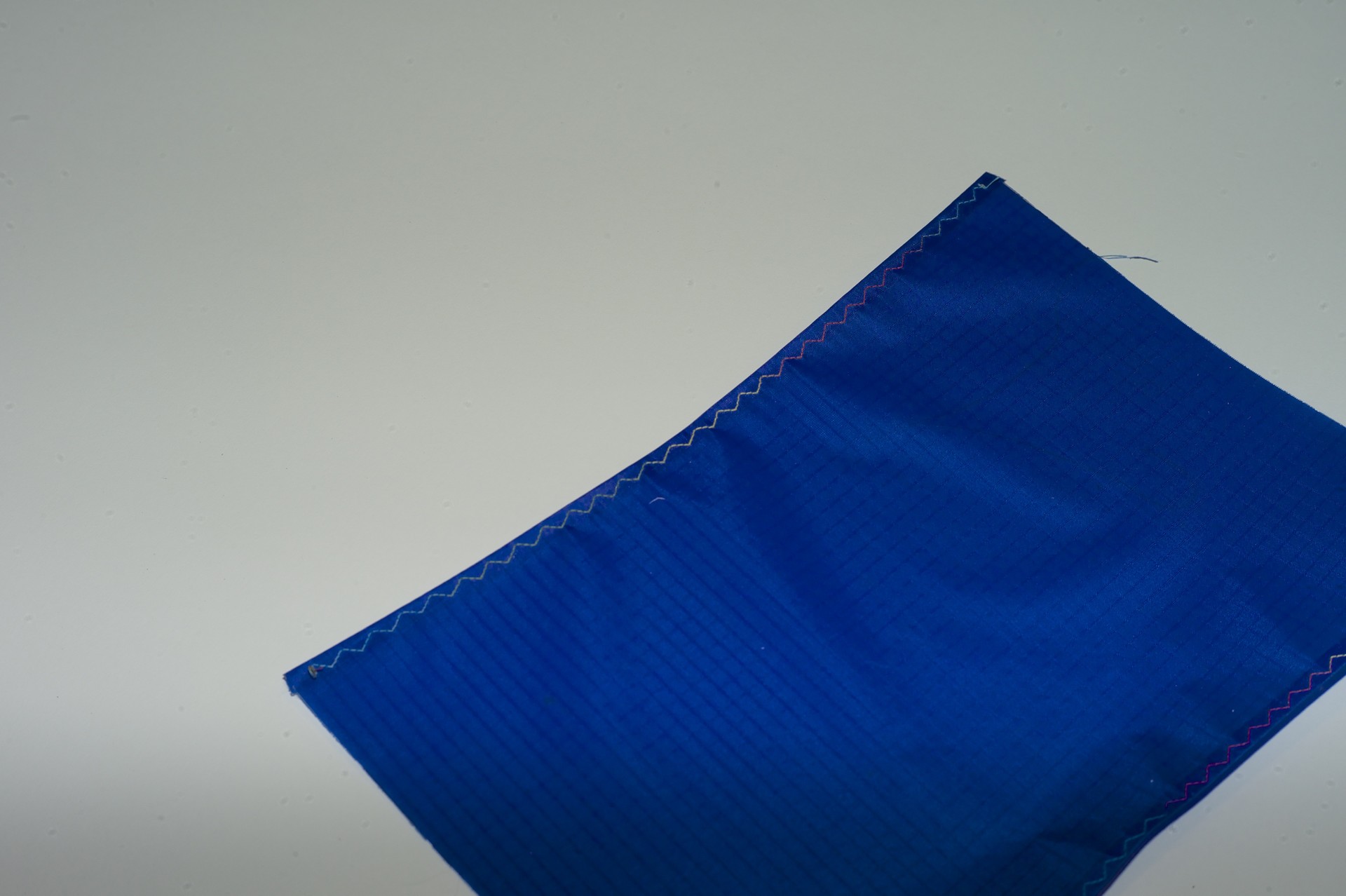
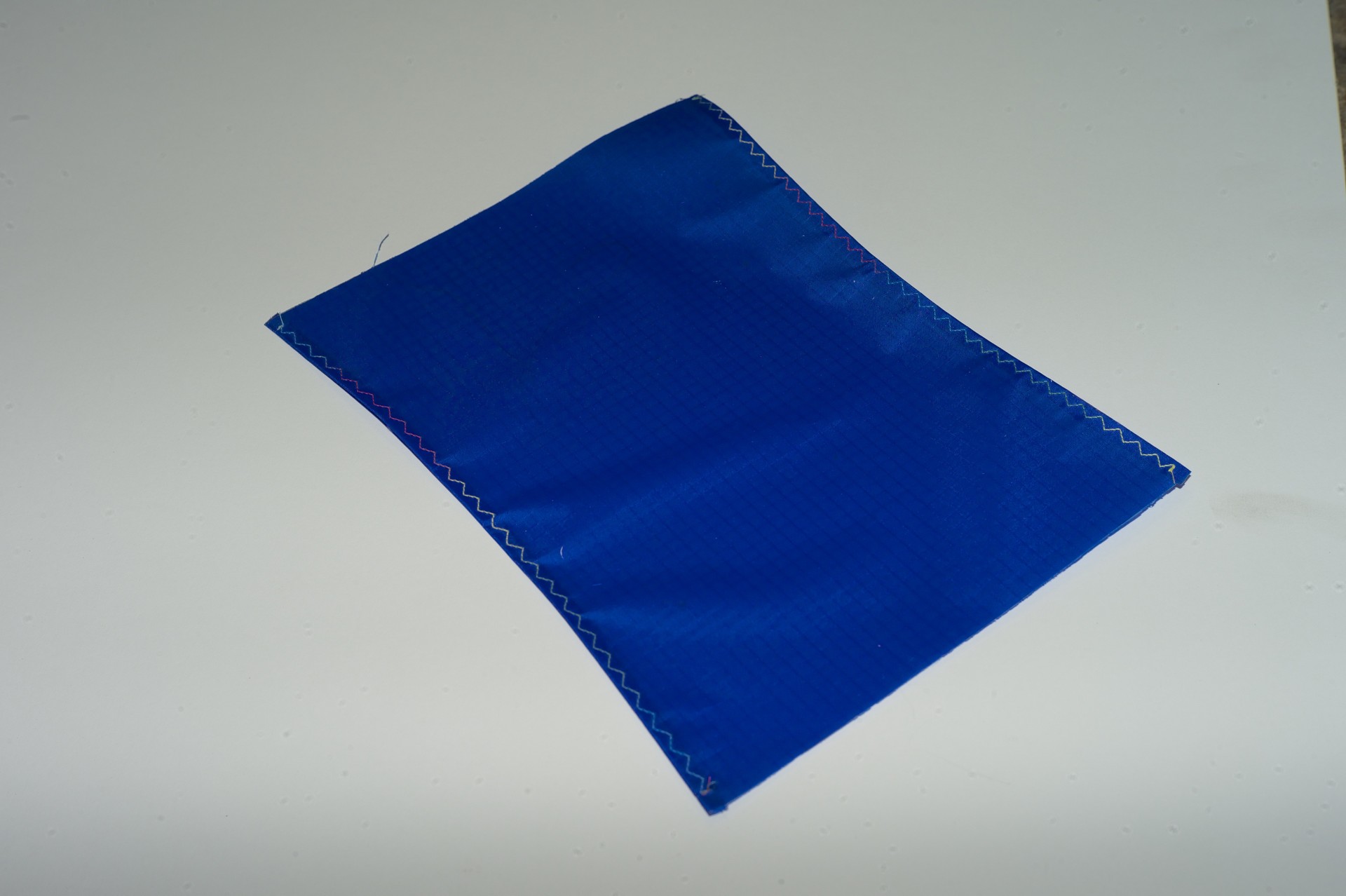
| Coutures
des ourlets
|
 |
 |
|
 |
 |
|
 |
 |
|
 |
 |
|
 |
||
| Couture des ourlets au point : multi point que nous utilisons pour sa résistance à la différence du zigzag qui risque de resserrer le tissu, non obligatoire. Le point droit convient aussi parfaitement. | ||
| Montage des
panneaux |
 |
 |
|
 |
 |
|
Montage des différents
panneaux avec l’adhésif. |
||
Regroupement des panneaux |
 |
 |
|
 |
 |
|
 |
||
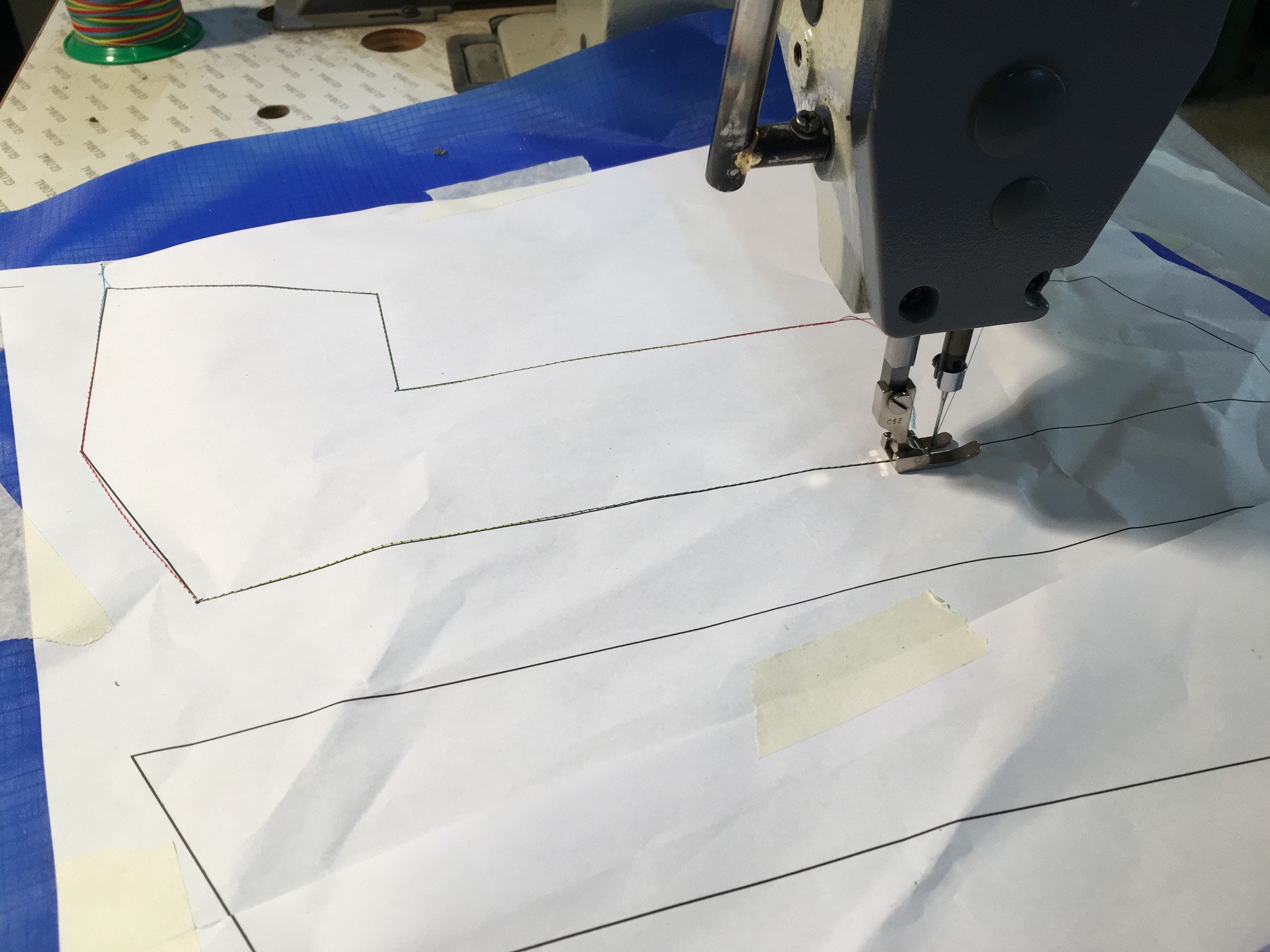
Couture au point droit
des différents panneaux. |
||
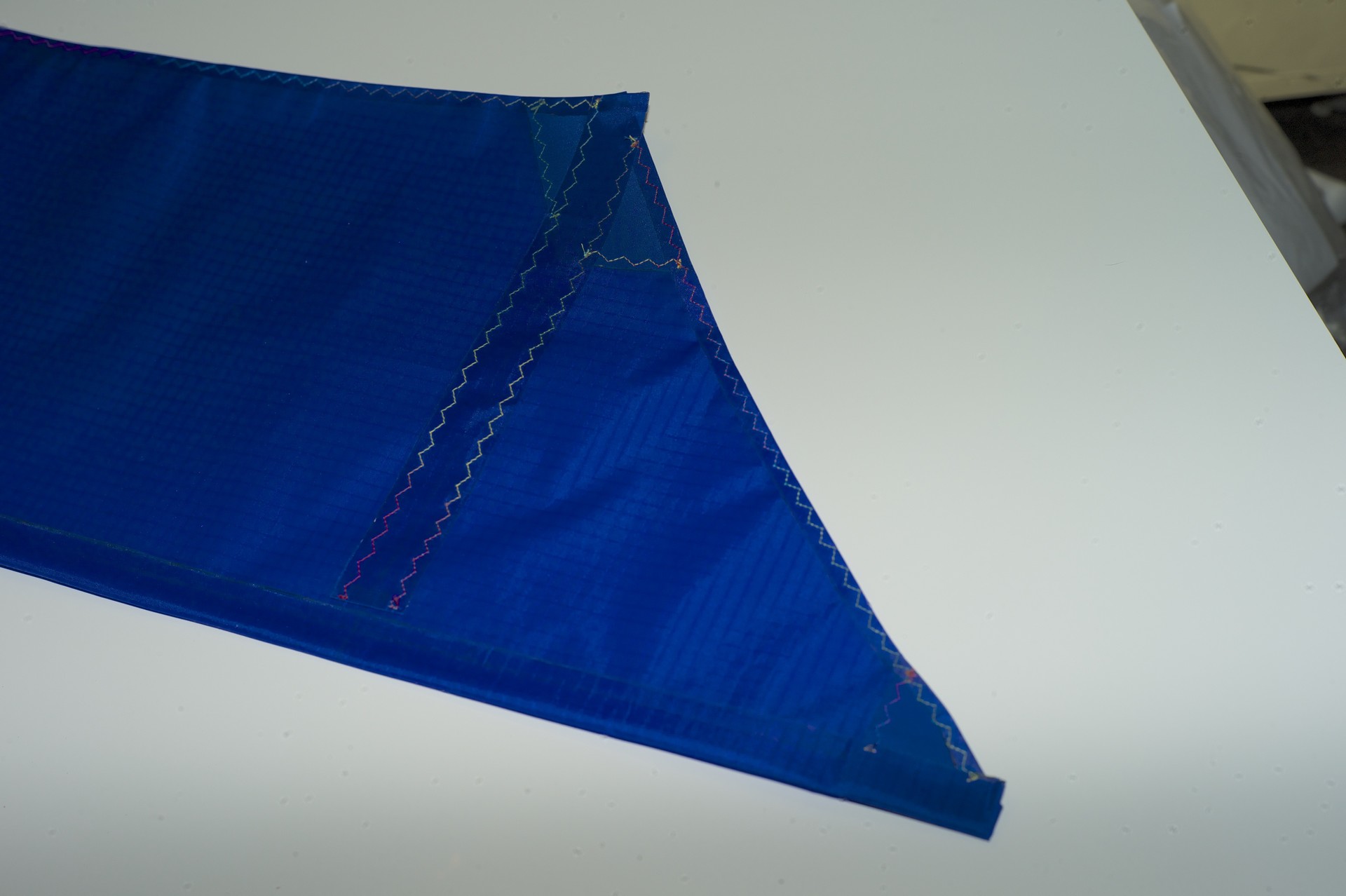
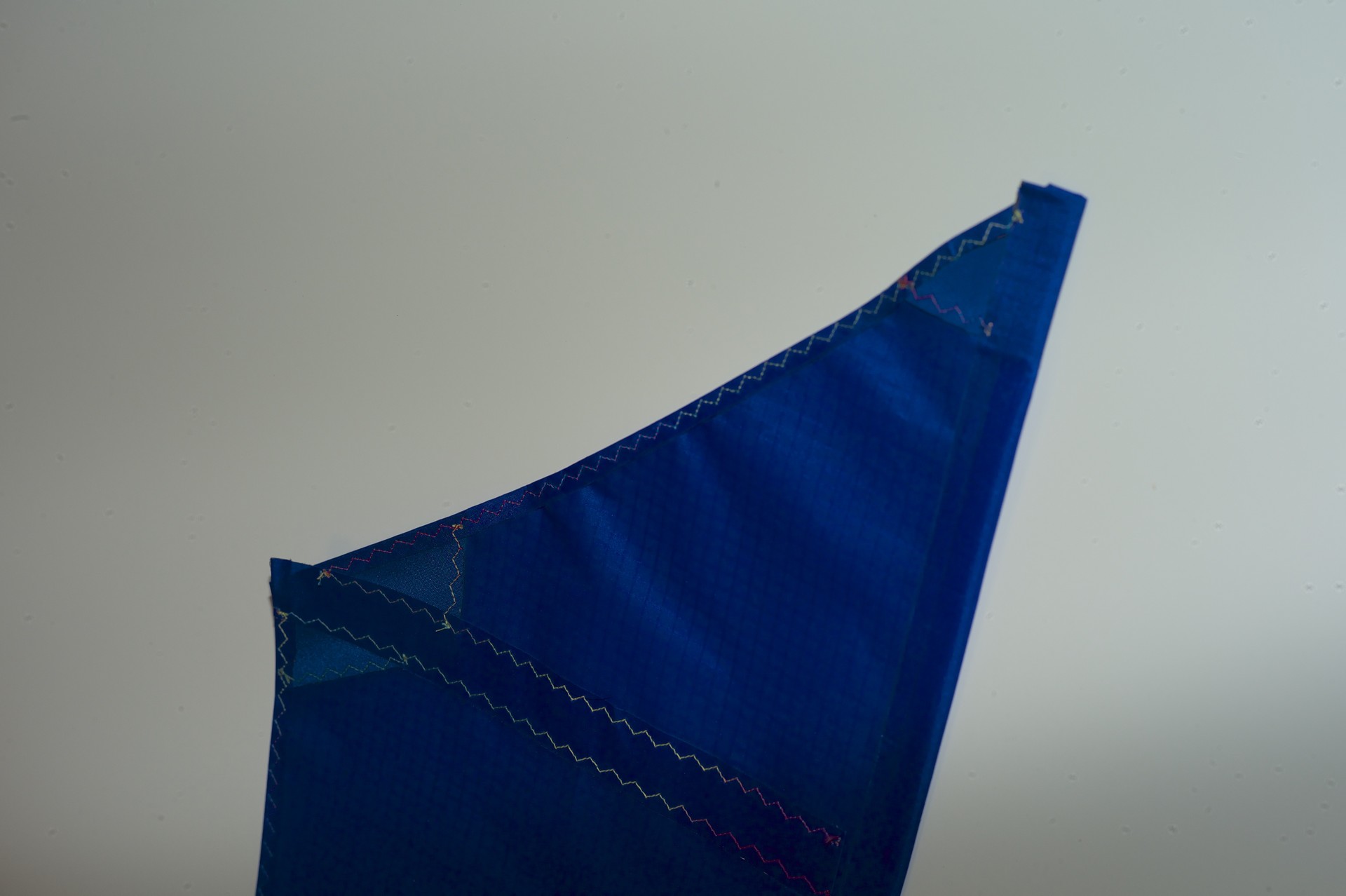
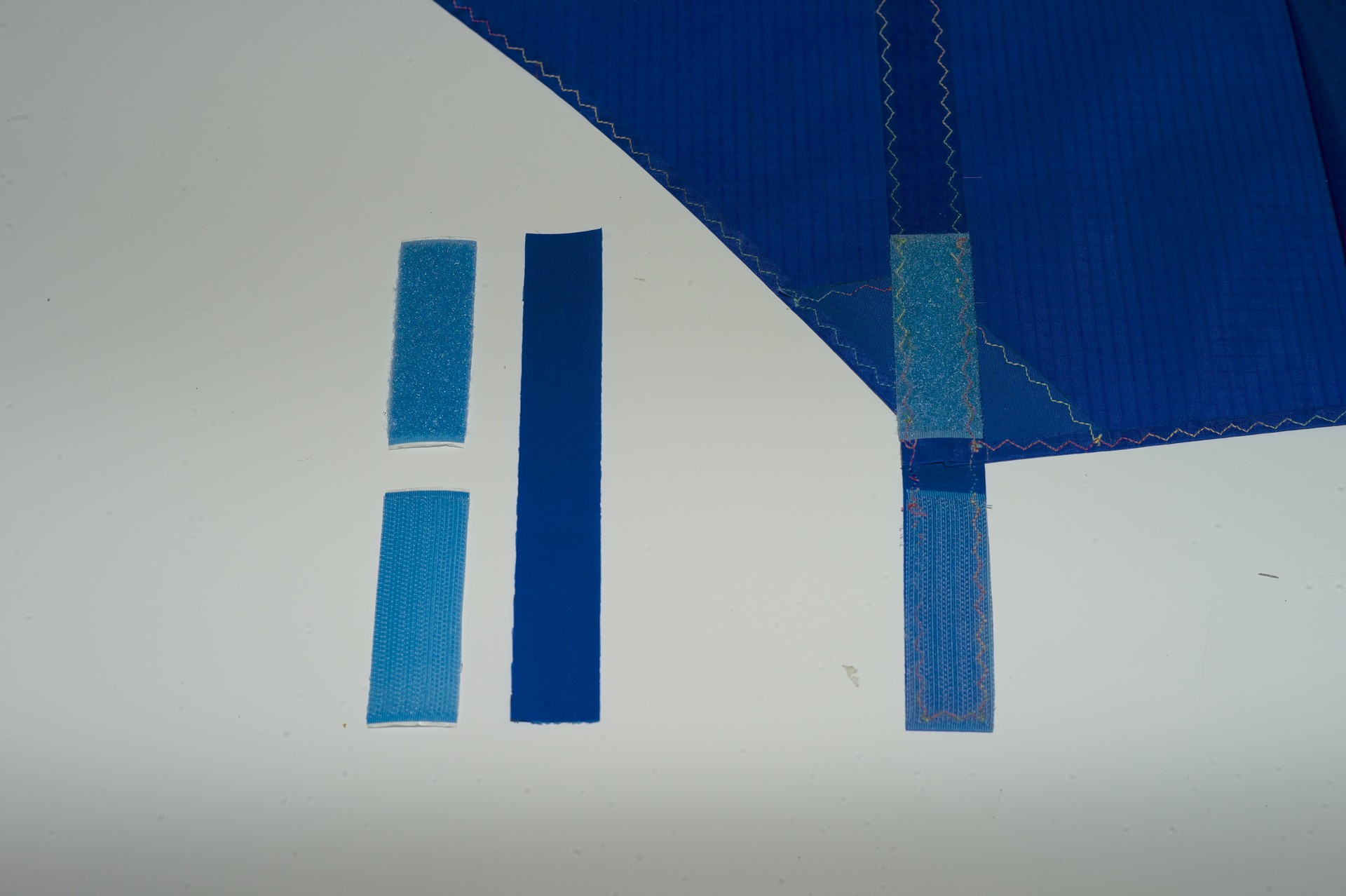
Fermetures des fourreaux |
 |
 |
|
 |
 |
|
Confection et couture
des fermetures des fourreaux. |
||
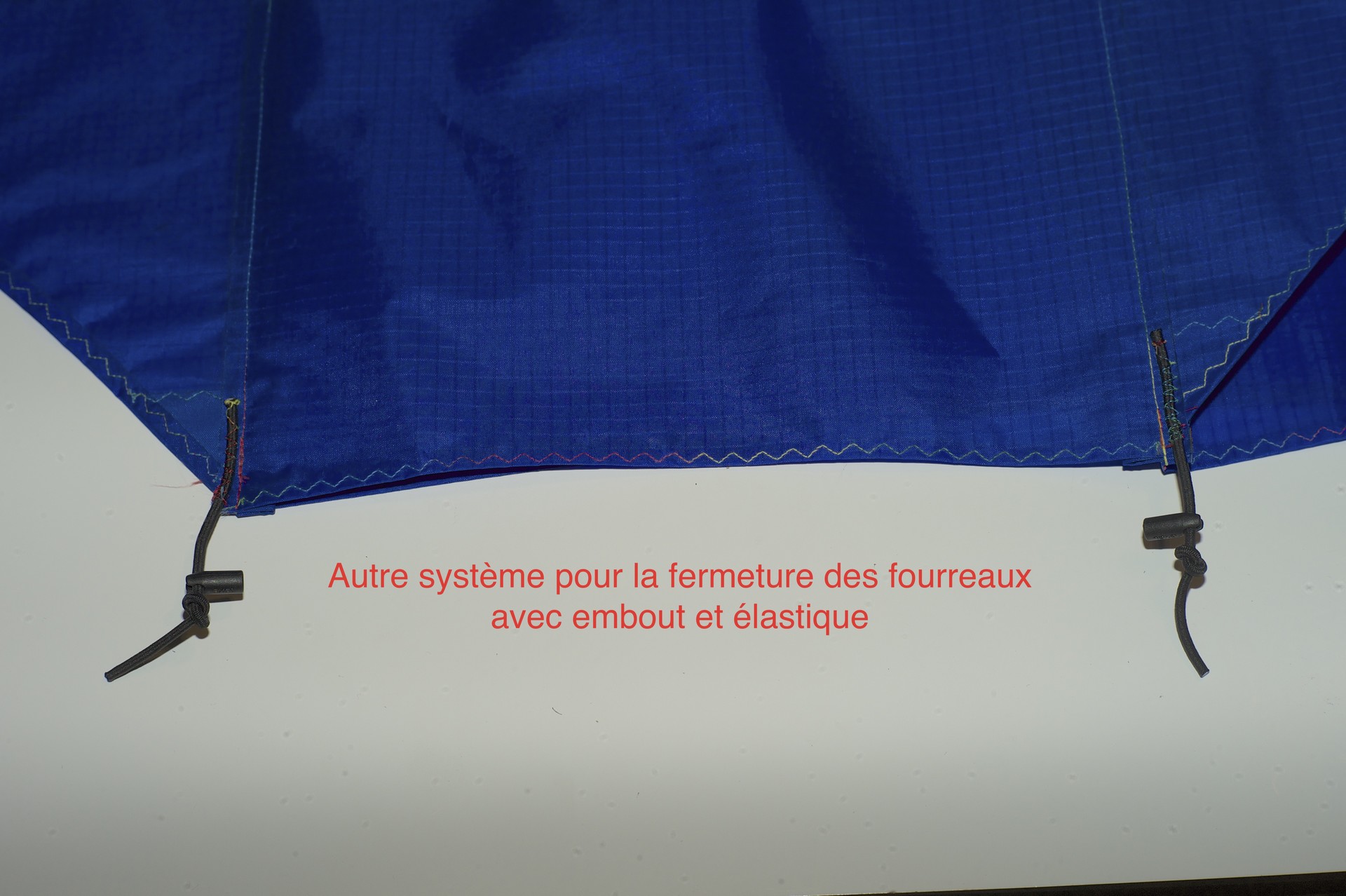 |
Couture des élastiques
avec les embouts pour assurer la tension du tissu. |
 |
 |
|
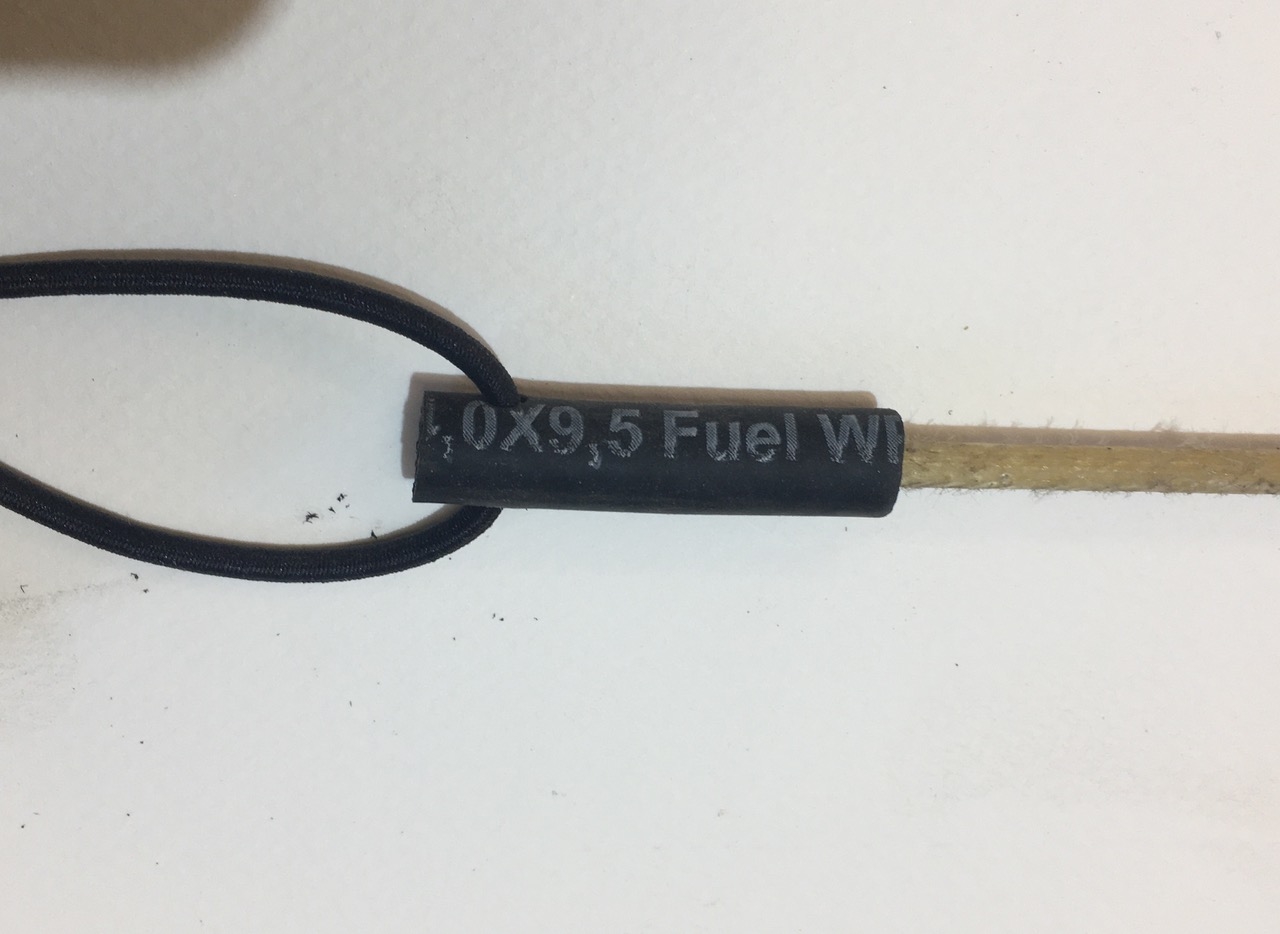
Une alternative aux connecteurs du commerce : durit essence percée pour l'élastique, ça marche nickel et coût proche de 0 €! Le montage de fermeture des fourreaux longitudinaux bas peut être modifié par ce type là qui encaisse mieux les posés durs ! |
||
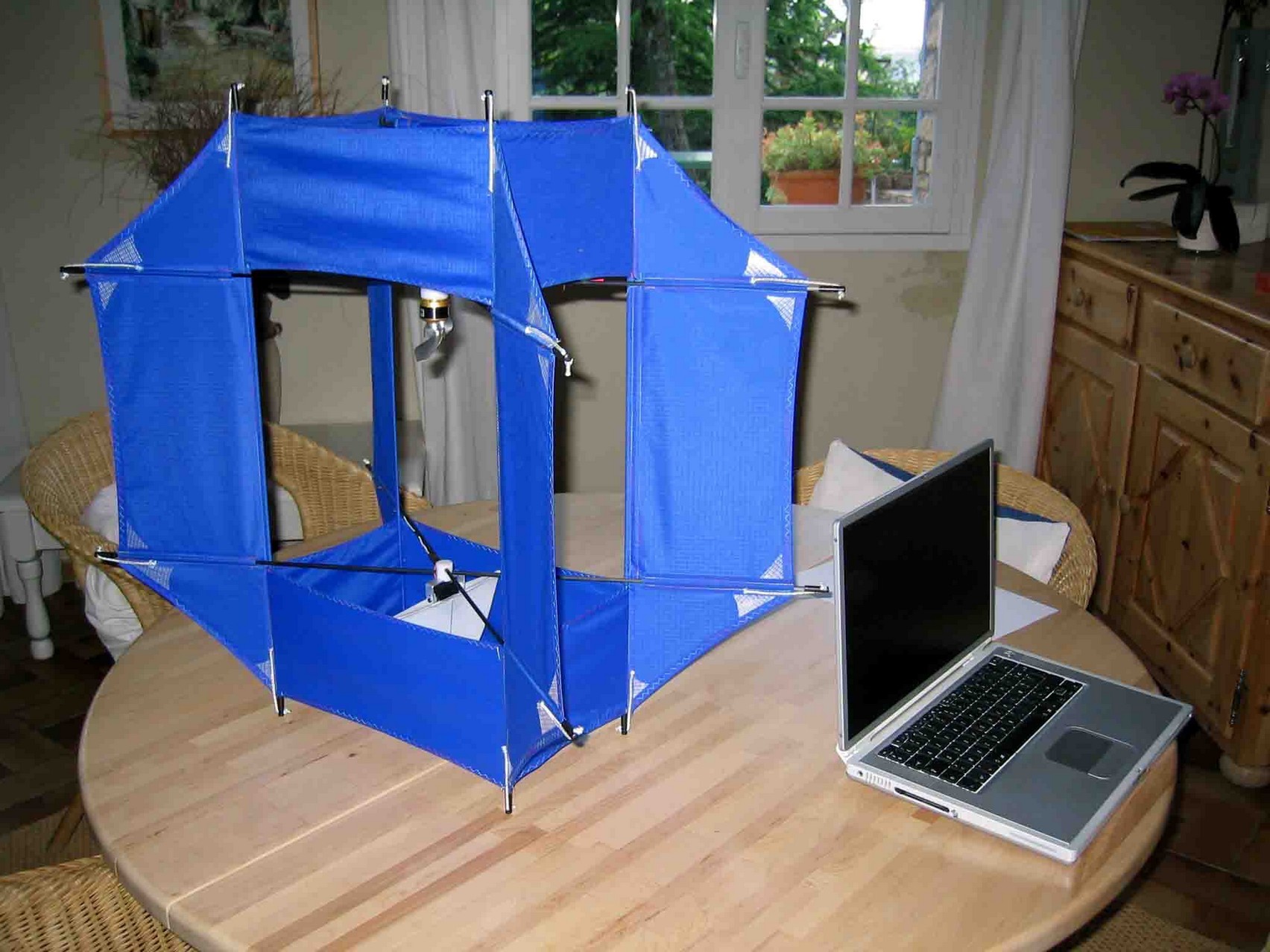 |
Le cerf-volant fini (premier modèle) |
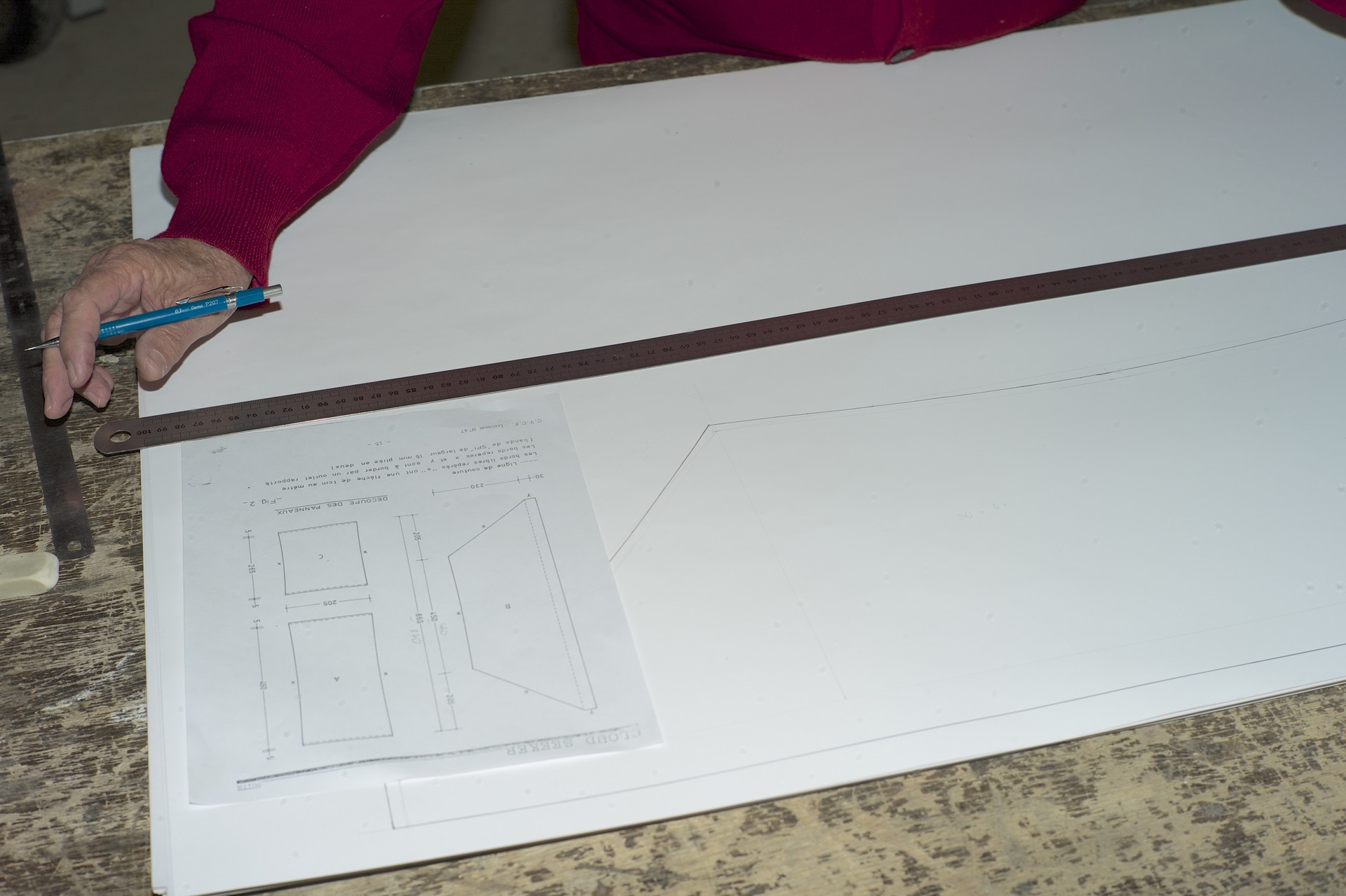
Plans, patrons et assemblages |
A ce stade de fabrication, le Cloud Seeker peut être utilisé comme un cerf-volant pur en installant une pâte d’oie en fil sur les repères noté centre de gravité (le rond divisé en quartiers noirs et blancs) sur l'illustration et une ligne.
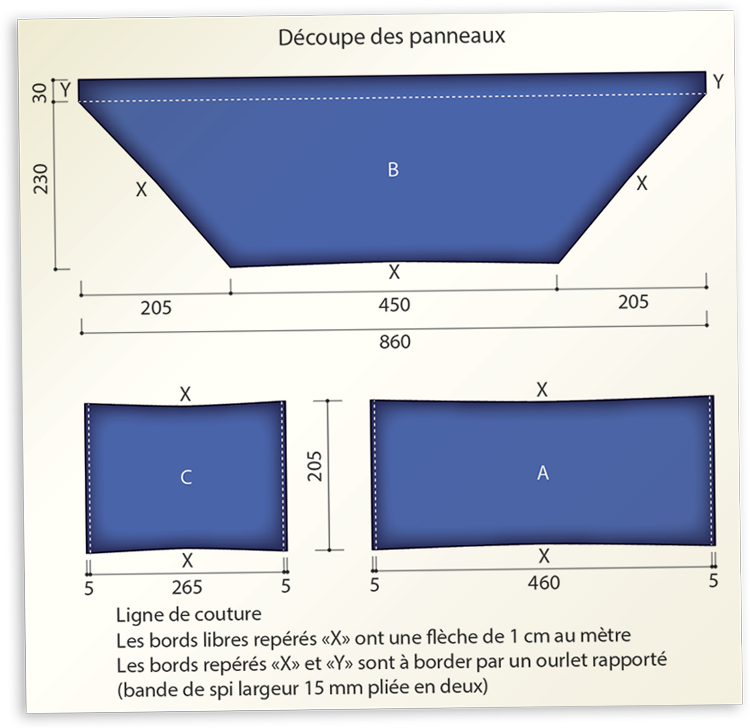 |
| Plan de découpe des panneaux, il faut noter que les cotés marqués X ne sont pas droits mais doivent avoir une légère découpe arrondie afin de répartir au mieux la tension du tissu : environ 1 cm de creux. |
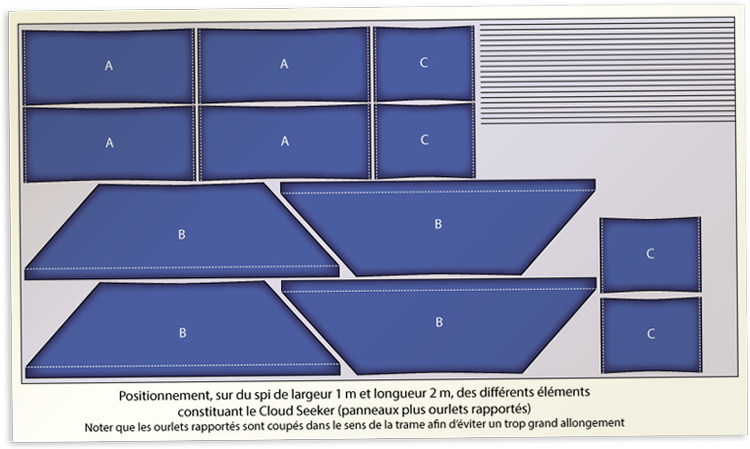 |
Positionnement des différents
panneaux sur la toile de spi pour minimiser les pertes. |
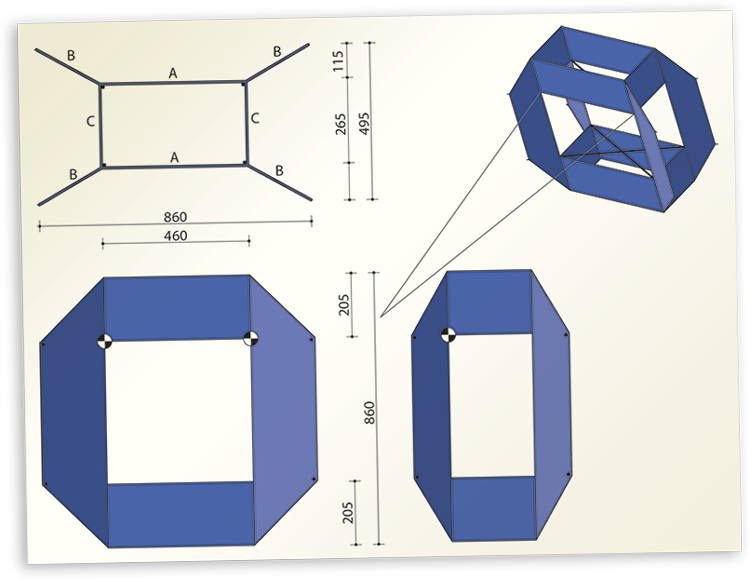 |
Schéma de montage du cerf-volant. |
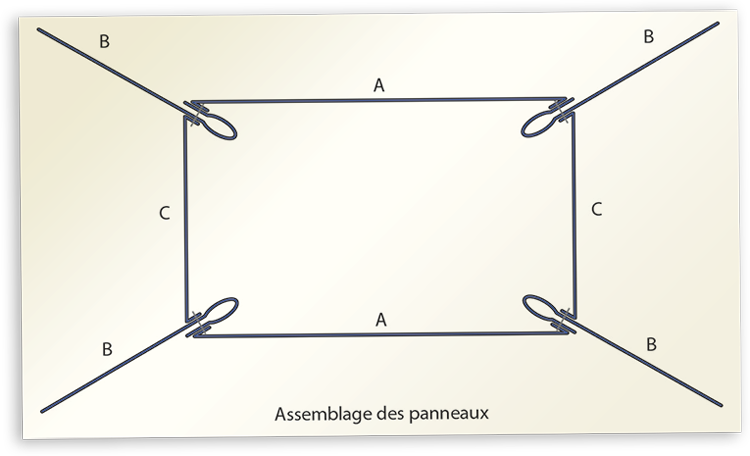 |
Assemblage des panneaux. |
 |
 |
|
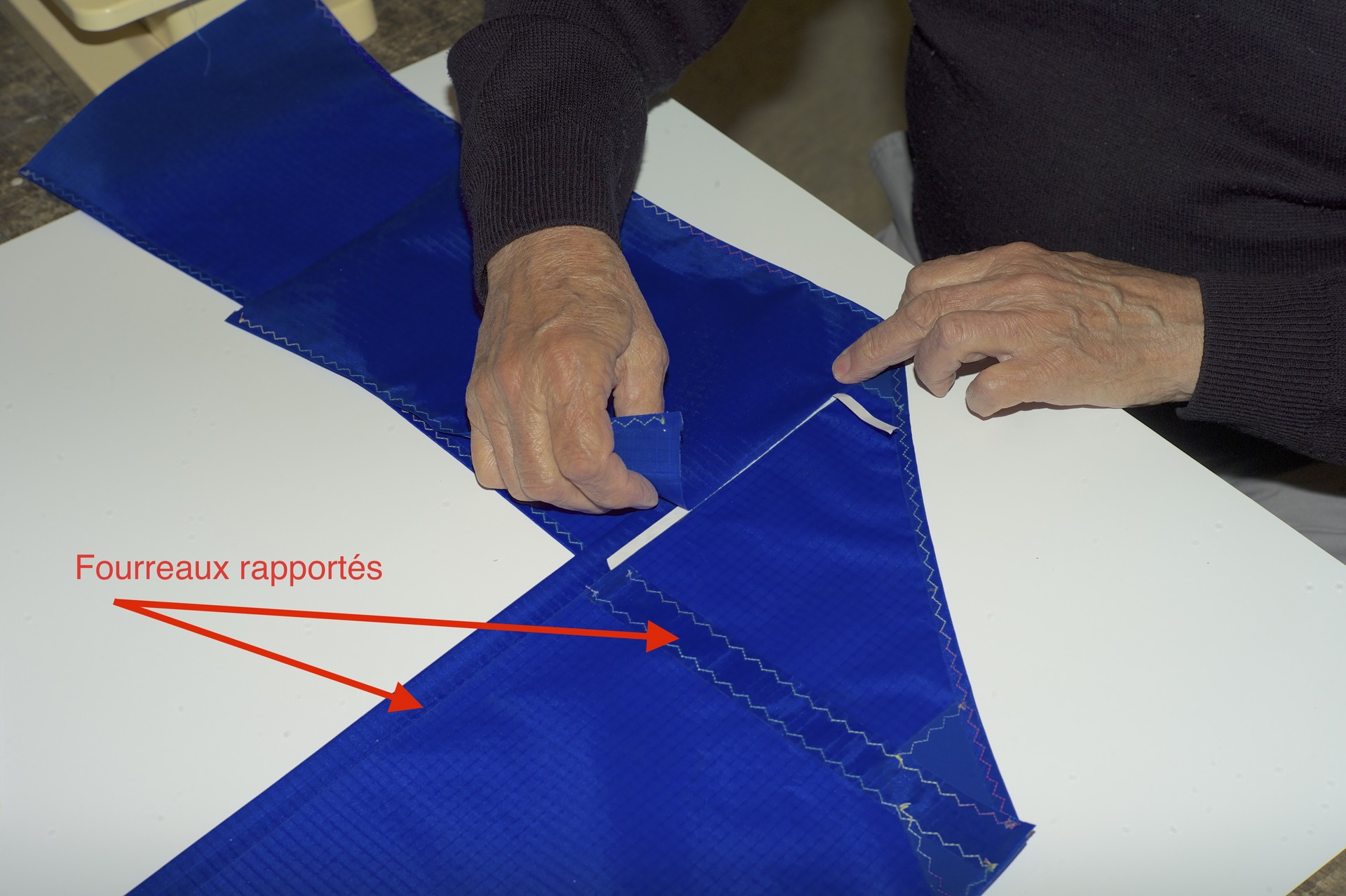
Fourreau rapporté |
Montage du fourreau avec l’adhésif
double face. |
 |
 |
|
Couture à 6 mm du bord. |
Deux types de fourreaux : pour couture à plat largeur entre 25 et 30 mm, pour une couture en ourlet : 40 mm pour des longerons de diamètre 5 mm. |
 |
 |
|
Deux autres protos.
A droite, un Père Noël et ses rennes. Comme quoi,
on peut extrapoler du Cloud Seeker, qui a volé avec les
bestioles qui courraient... mais comme l’engin était
trop petit, on ne les voyaient pas ! |
||
 |
Motorisations et gouvernes |
 |
Une fois que la cellule est terminée, son poids devrait approcher les 450 g en fonction du grammage du tissu qui peut aller du simple au double et du diamètre des longerons tant longitudinaux que des croix. Le poids total reste très raisonnable en dessous des 800 g ! Il serait possible de gagner encore du poids en diminuant les échantillonnages des tubes carbone, motorisation moins puissante, etc. Pour le mien, comme je souhaitais m’en servir pour de multiples
activités, j’ai choisi de l’équiper
avec du matériel qui me donnait une large gamme de puissance
et d’autonomie au dépend du poids total qui dépasse
le kilogramme. |
Malgré le poids total, la charge alaire reste très raisonnable. Dans mon cas, elle avoisine 14 g/dm² puisque la surface du cerf-volant est de l’ordre de 88 dm².
 |
 |
|
|
|
 |
Pour une hypothèse
de vol indoor par exemple, on peut tout revoir avec une baisse
importante du poids. |
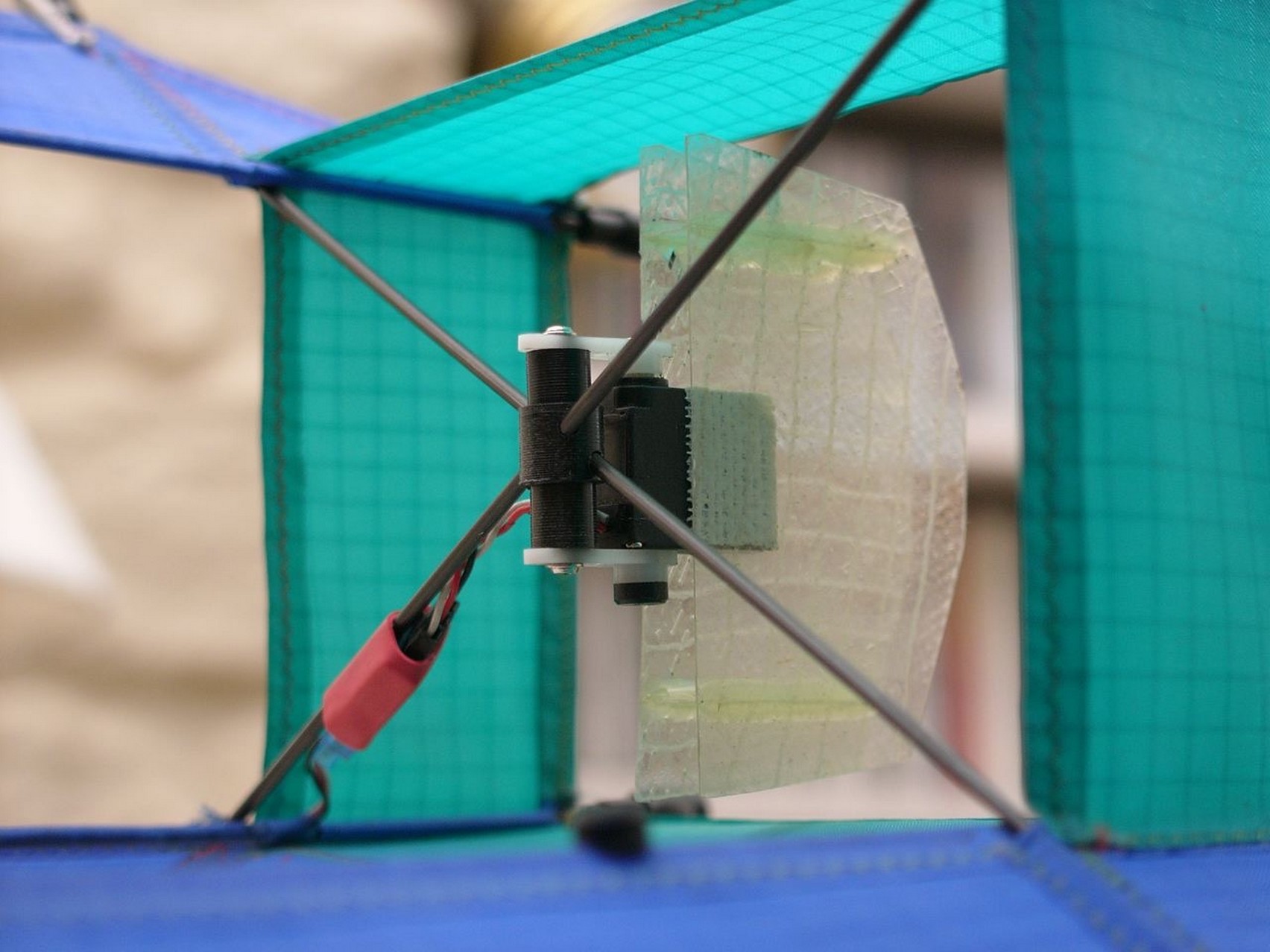
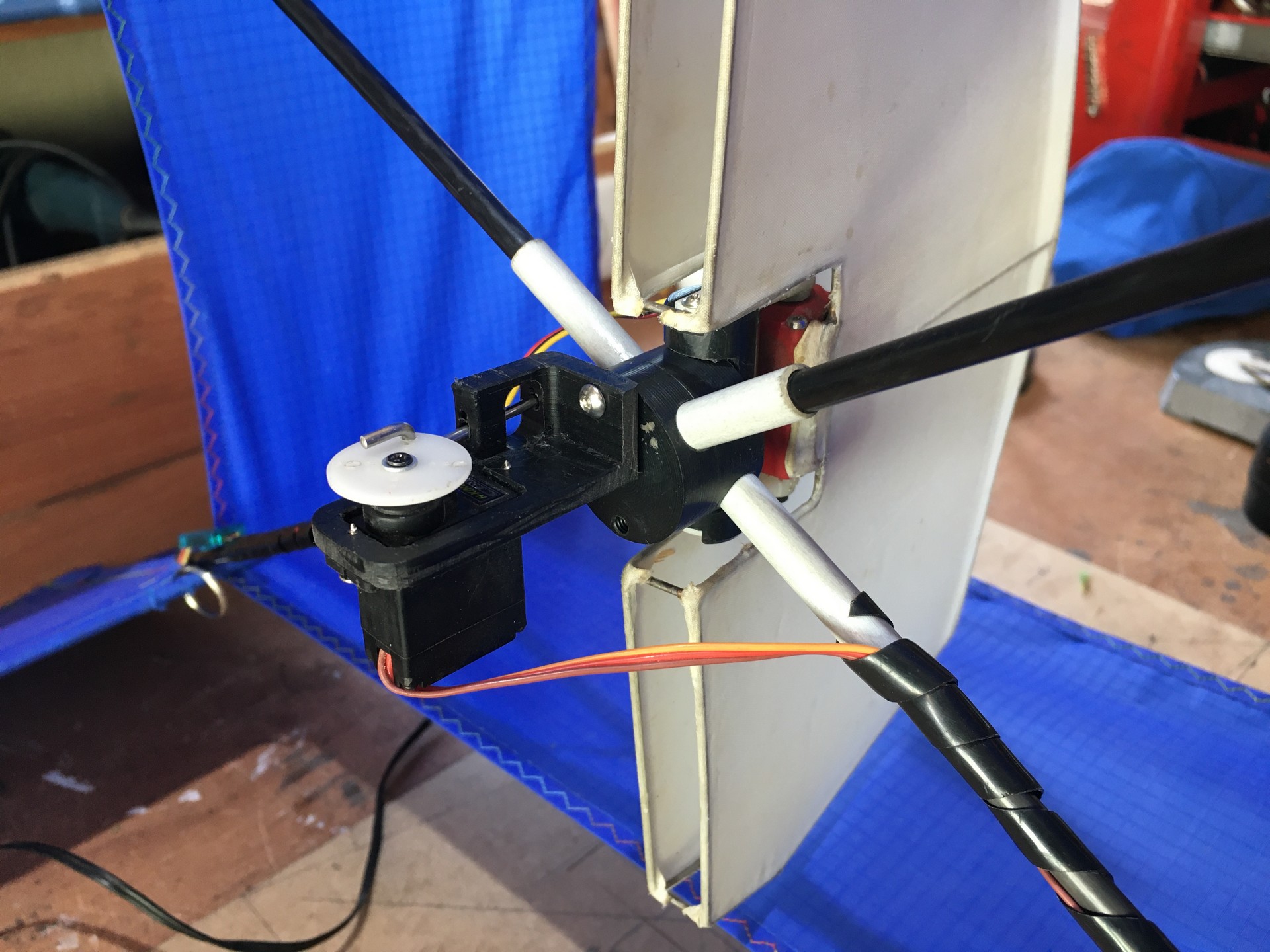
Pour la fabrication du support moteur, plusieurs possibilités (liste non exhaustive) et surtout laisser libre cours à son imagination...
A ce moment, il faut connaitre une chose très importante sur
le vol du cerf-volant motorisé : c’est sa totale indifférence
à l’action des gouvernes de profondeur aérodynamiques,
qu’elles soient positionnées en arrière ou en canard
avant du moteur. Sur un ordre à piquer ou à cabrer il
va commencer à réagir mais rapidement va revenir dans
sa position d’équilibre même avec un maintien de
la commande !
Après un nombre important d’essais tous infructueux, la
seule solution efficace trouvée fut celle de la poussée
vectorielle du moteur ! Très efficace sur mon modèle qui
permet des figures excessives comme des décollages et montées
verticales sans fin même avec une banderole de 5 m de long.
A ce stade, un autre point important en ce qui concerne son comportement en vol : comme la portance dépend uniquement de son assiette de vol il ne peut pas être réglé comme un planeur ou avion car si en vol son incidence devient nulle = plus de portance = direction la planète !
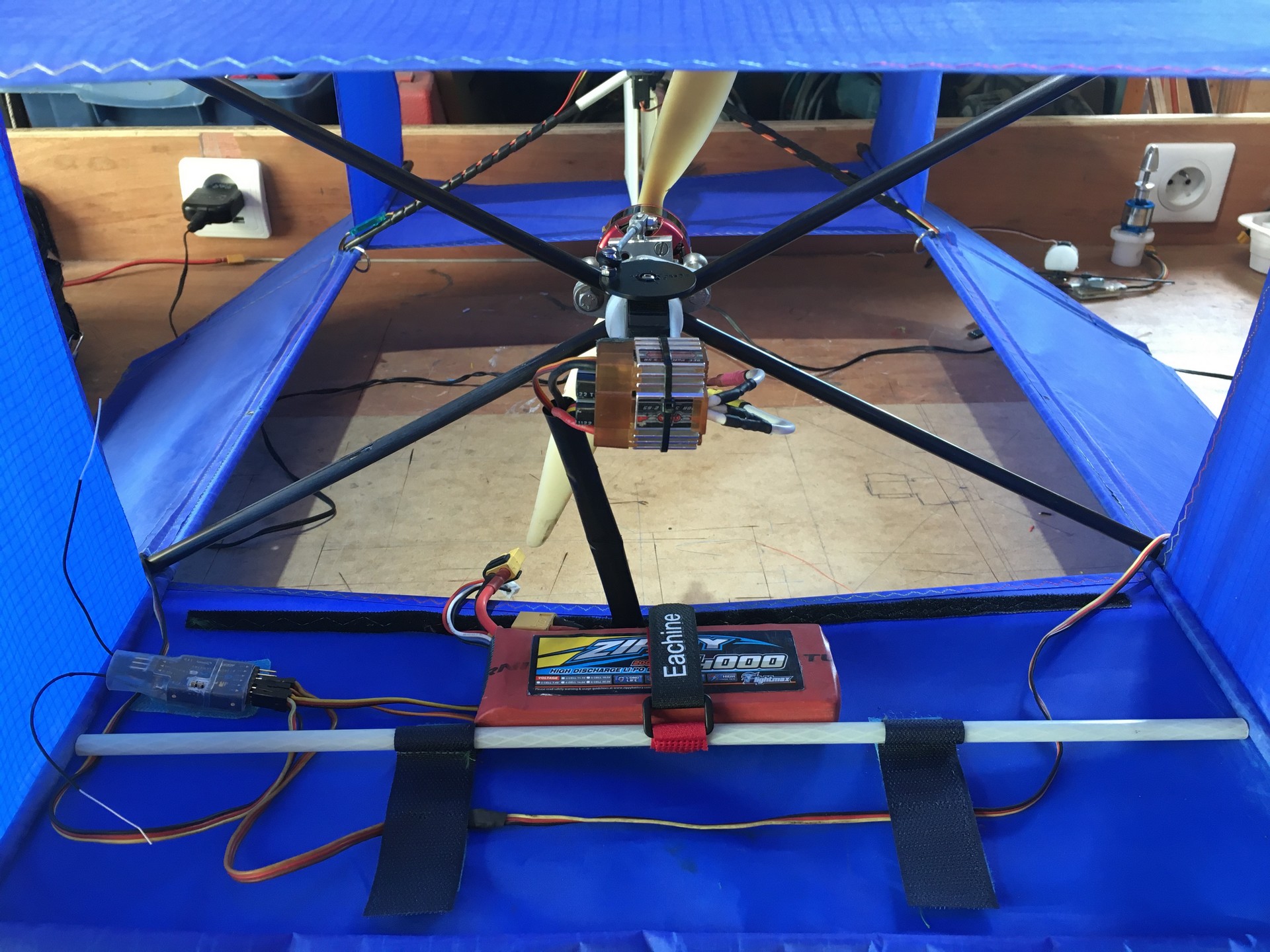 |
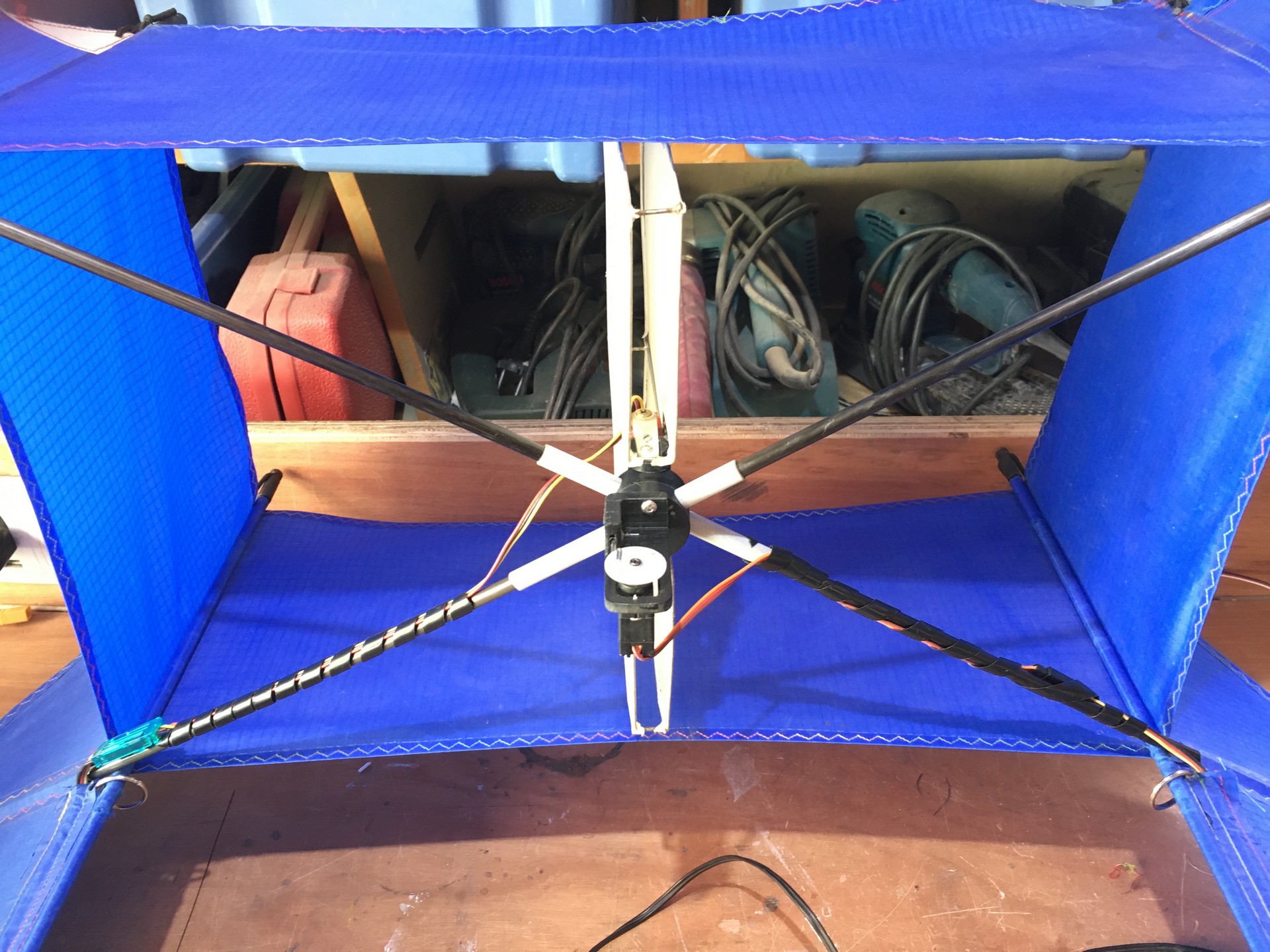
La batterie est placée
vers l'avant, à proximité du moteur. Question de
centrage. |
Il est apparu qu’il fallait que le cerf-volant se cabre systématiquement quand il ralentit !
Sans cela les vols deviennent plus aléatoires et c’est une règle que j’applique pour tous mes engins volants de ce type ou cycliste, triporteur compris.
La poussée vectorielle du moteur permet aussi de régler finement cette assiette de vol en fonction soit des conditions météo, vent par exemple soit du type de vol en indoor, etc.
C’est là que ce situe la différence fondamentale entre son réglage, celui d’un planeur, d’un avion ou d’un cerf volant pur !
Réglage du moteur et du volet de direction |
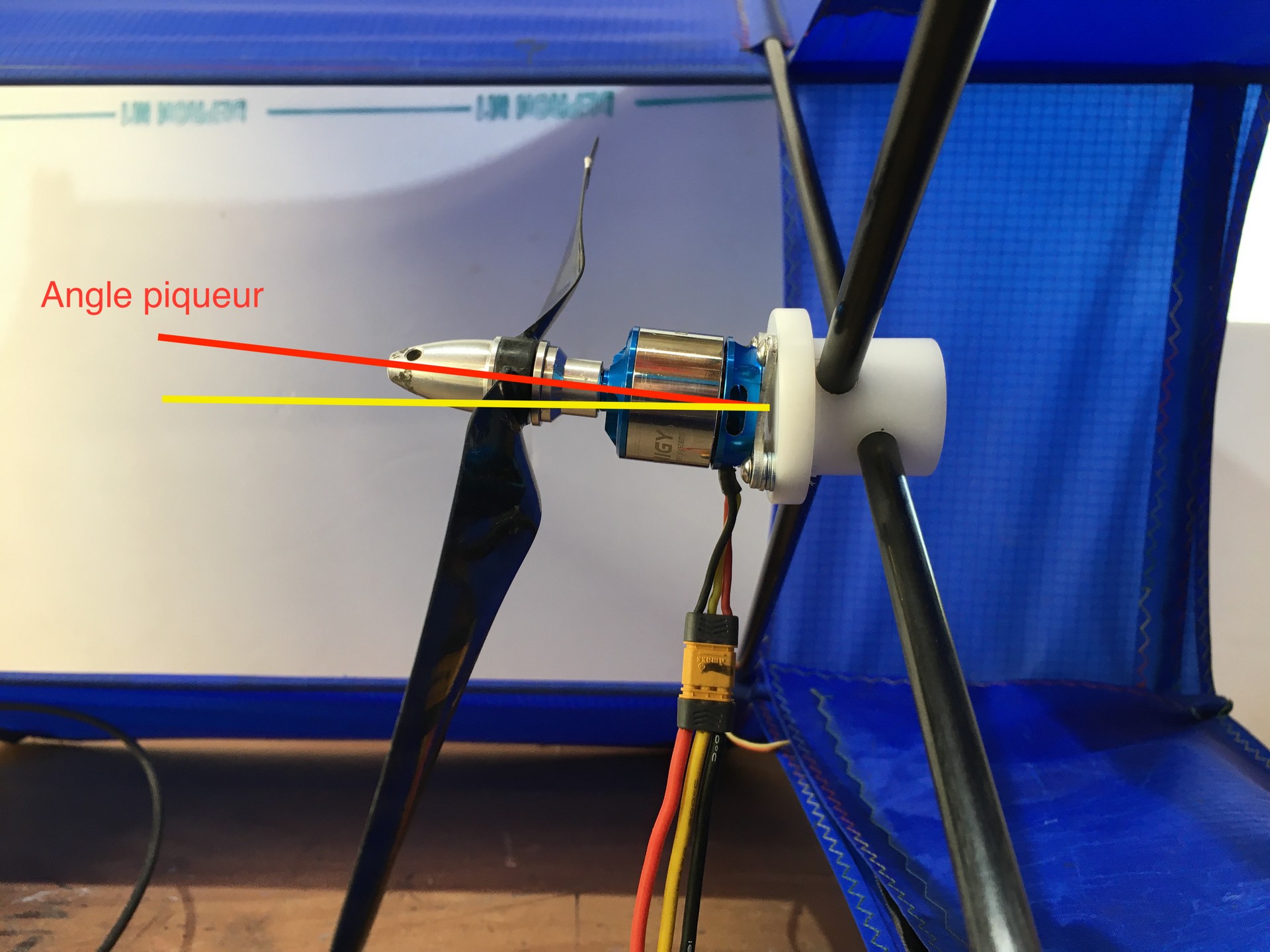
Après les premiers lancés main pour régler son comportement en plané comme vue au-dessus arrive le réglage du volet de direction et surtout du moteur.
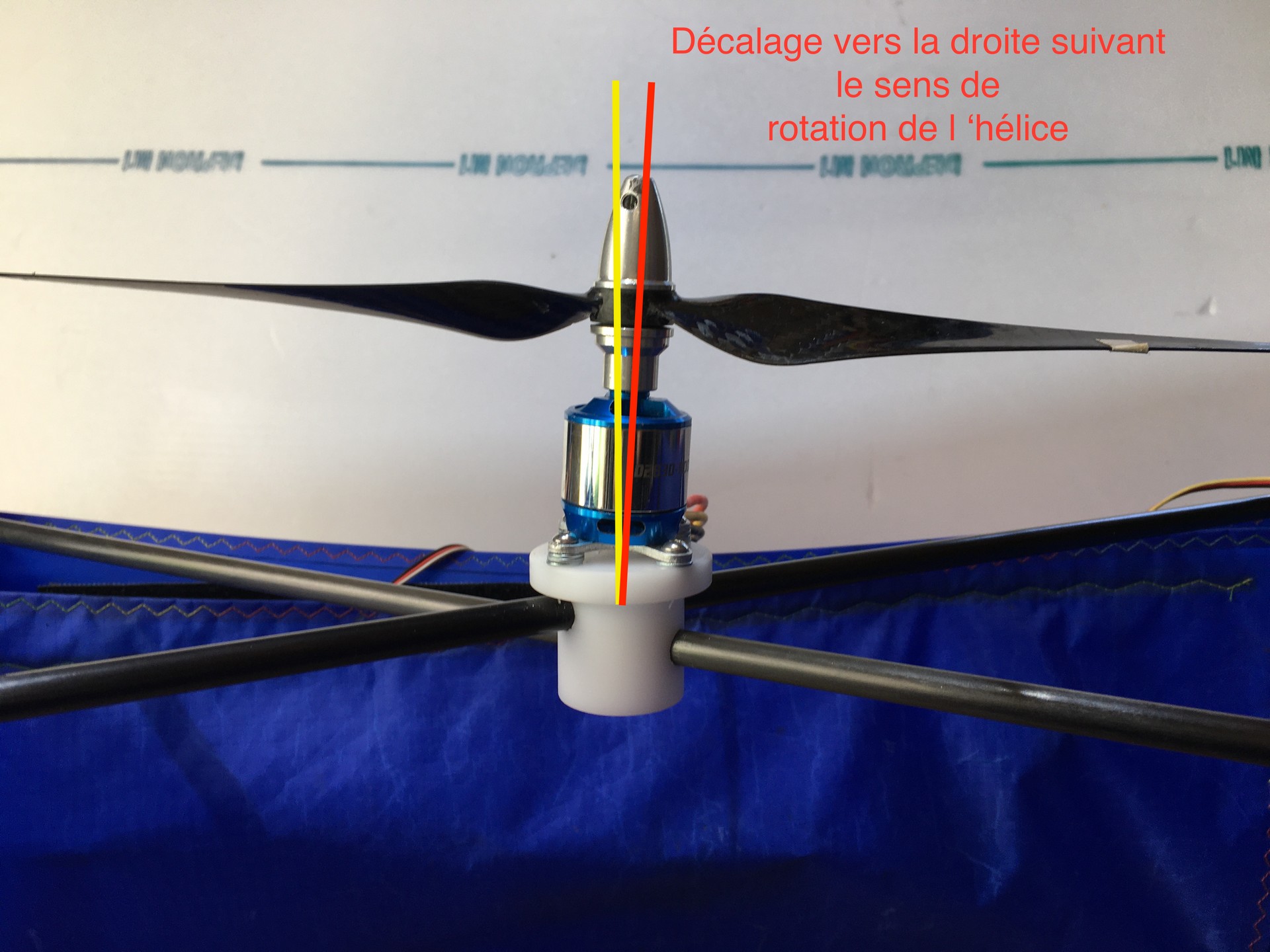
Latéralement, quelques degrés juste pour combattre le couple de l’hélice, ça tout le monde connaît. Par contre, pour le piqueur, il y a une astuce, d’abord calé à 0 pour voir le comportement du cerf-volant à faible vitesse et ensuite lui donner soit du cabreur soit du piqueur en fonction de son comportement en l’air !
 |
 |
|
Angle piqueur et anticouple (pour rappel, le moteur est monté en propulsif). |
||
S’il grimpe comme un malade rajouter progressivement de l’angle
piqueur, c’est-à-dire moteur qui pousse vers le haut et
s’il à tendance à descendre, faire l’inverse
!
C’est simplement fait en rajoutant des rondelles sous le support
moteur. Le mystère de ces trucs-là, c’est que deux
cerfs-volants identiques peuvent avoir un comportement totalement inverse
au moteur, même en ayant respecté le centrage ; je n’ai
jamais compris pourquoi.
Par contre là est le principal intérêt du moteur orientable qui permet un réglage fin de l’assiette de vol. Sans être indispensable c’est un confort supplémentaire.
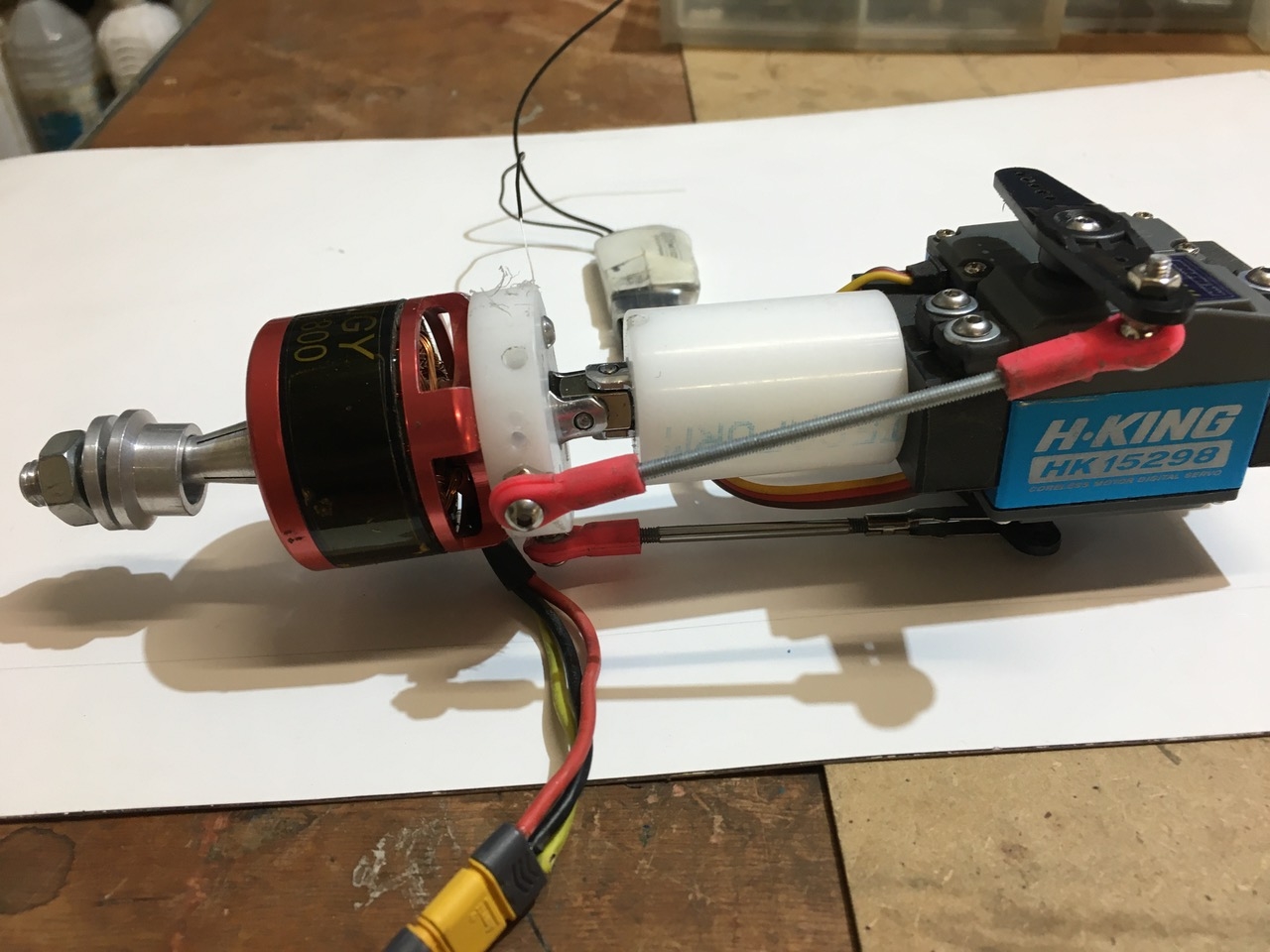
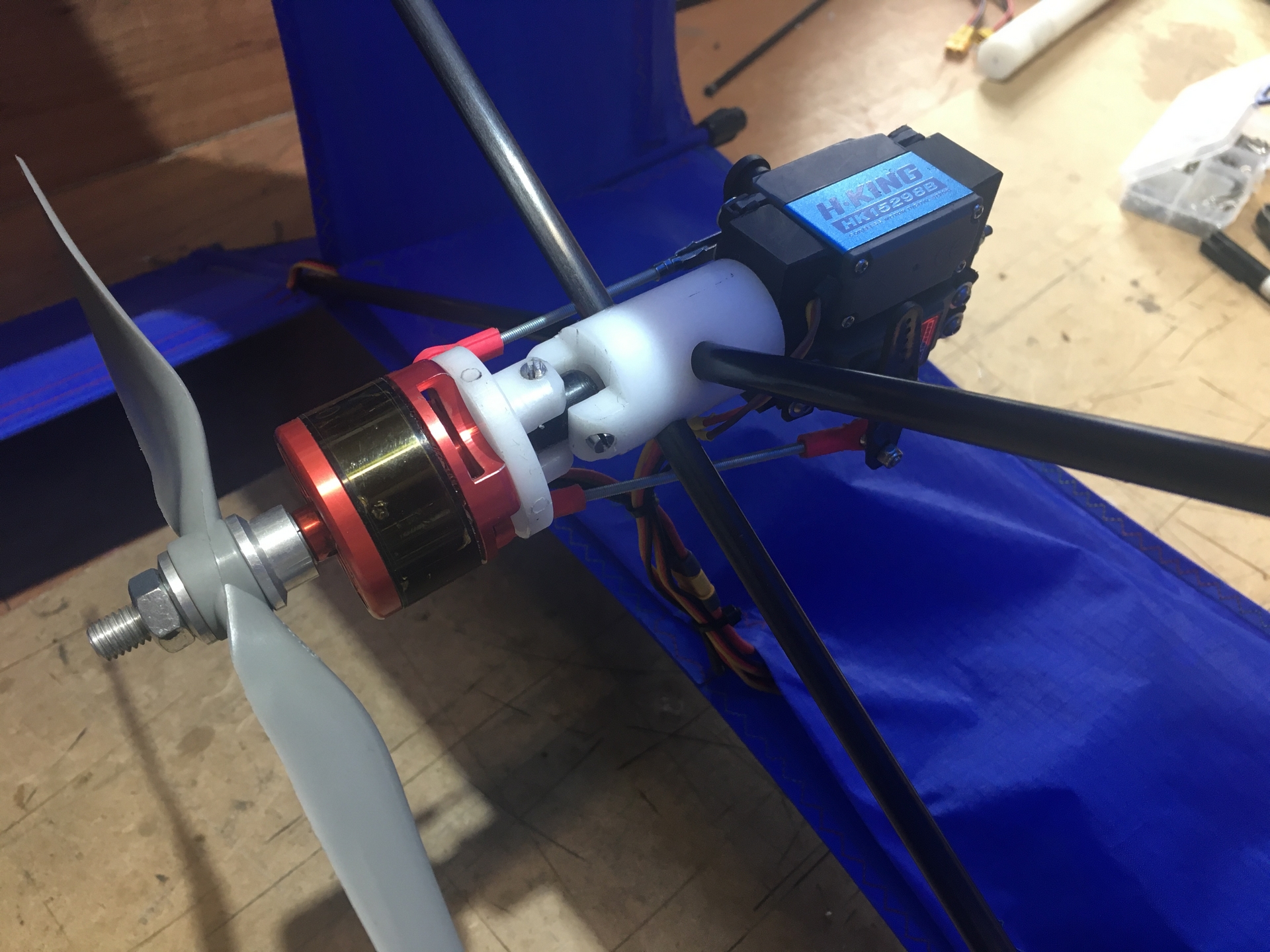
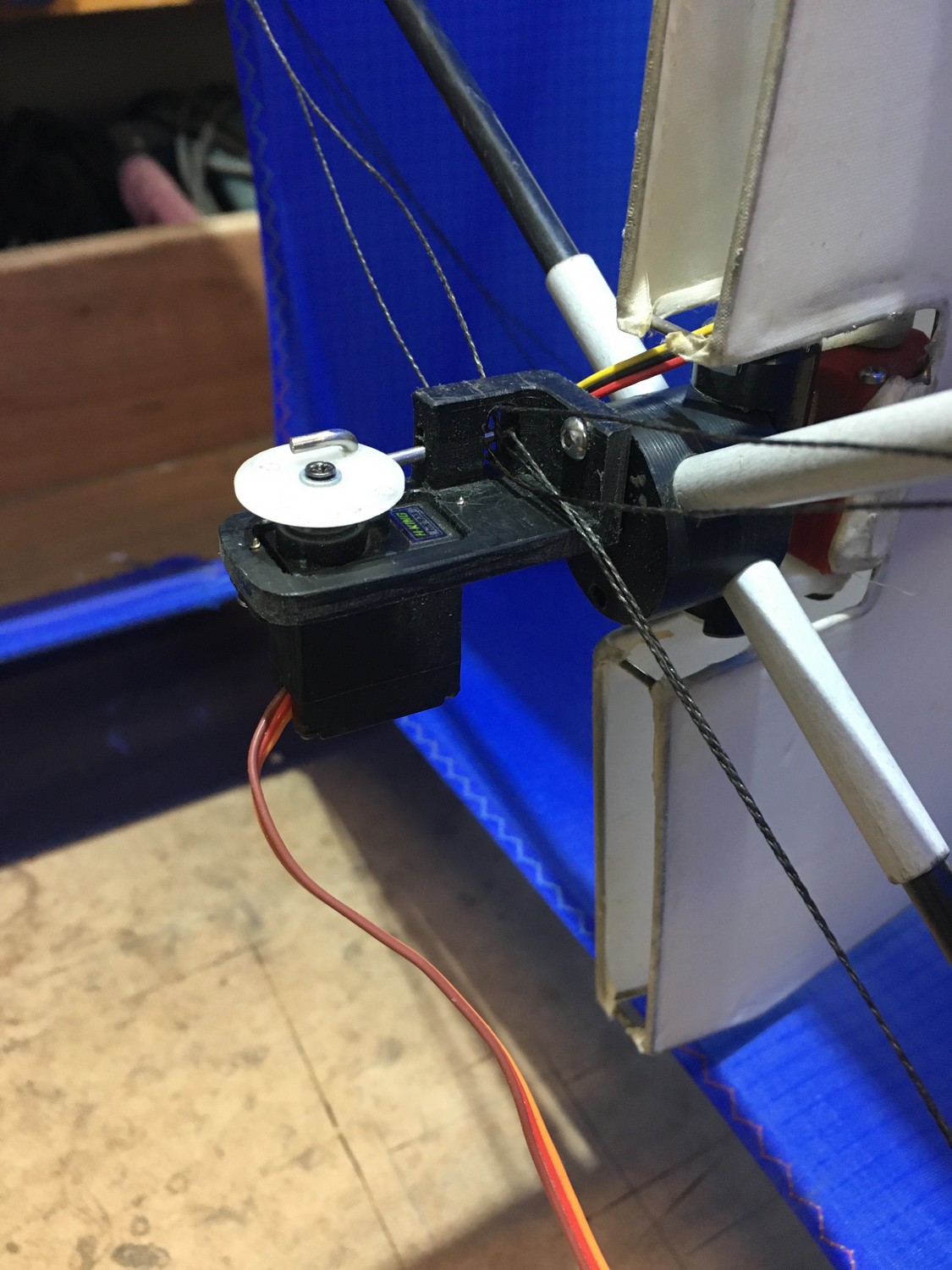
Support moteur |
 |
 |
|
J’emploi
du plastique POM (Céloron, Ertalon, Ertacetal, etc.) en
barres ou en plaques qu’on peut se procurer chez Otelo (pub
gratuite) ou ailleurs mais ce n’est pas indispensable. |
||
 |
Du rond de bois dur,
frêne par exemple convient très bien, passé
au tour mais encore une fois cela n’est pas indispensable. |
 |
 |
|
Depuis longtemps
j’utilise des chapes à boules soit métalliques
(Conrad) soit plastique pour avoir une articulation fiable et
sans jeu. |
||
De nouveau, ce ne sont que des pistes personnelles qui marchent depuis des années mais là encore l’imagination devrait faire le reste.
Mise à jour :
|
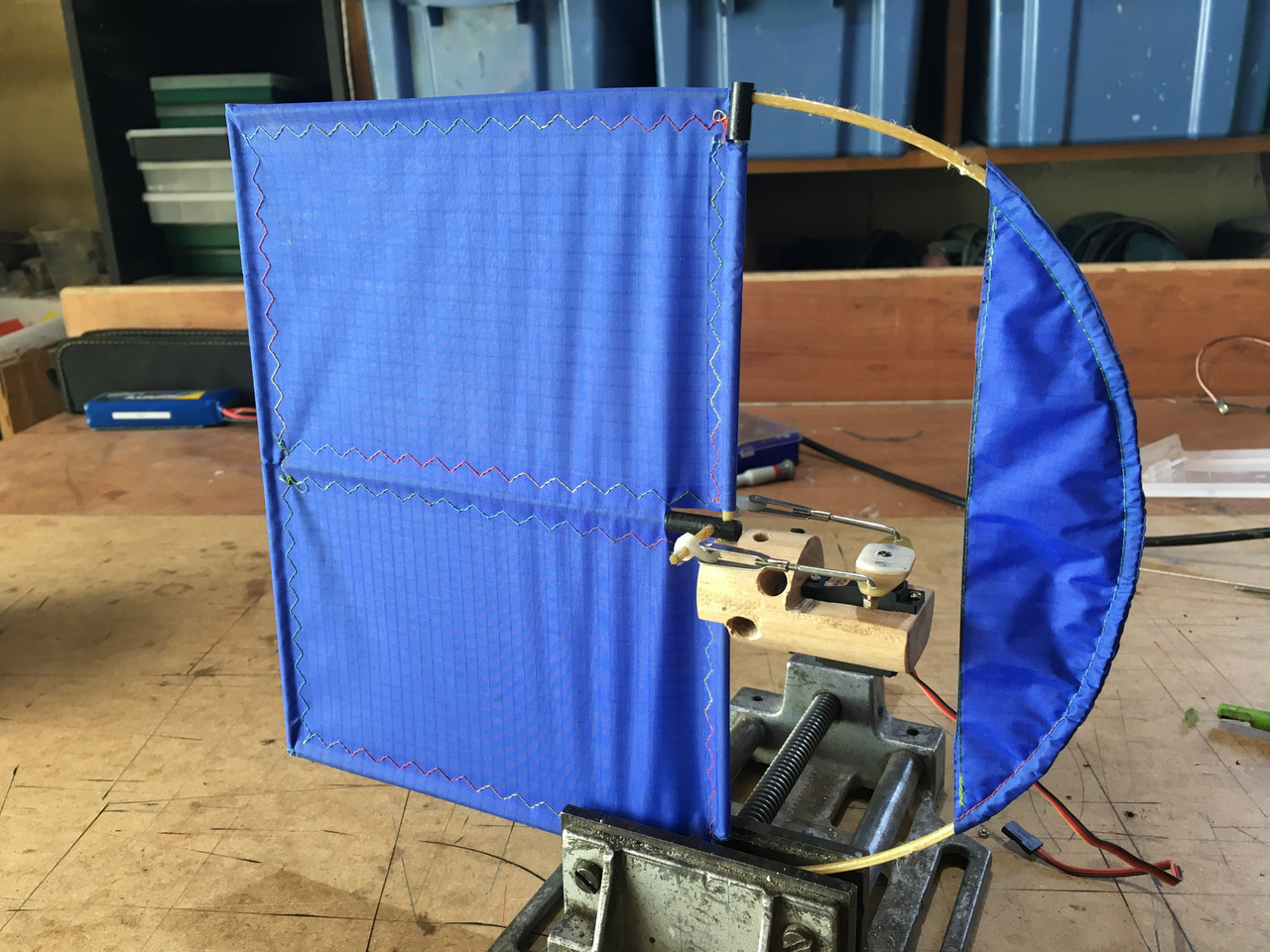
Gouvernes |
Pour la gouverne de direction, différents choix sont possibles (non exhaustif), la base de départ est la même que celle du support moteur. Positionnée au centre de la croix en carbone arrière, sa taille est juste limitée par la hauteur du caisson, la plus grande possible semble un bon choix pour favoriser les évolutions non conventionnelles.
 |
 |
|
Depuis de début,
j’utilise les servos moteurs « à l’envers
», c’est-à-dire que le palonnier est fixe.
C’est le corps du servo qui pivote ; pas de tringlerie de
commande, une action directe. |
Sur certains modèles, le corps du servo est emprisonné entre deux surfaces qui fonctionnent comme des volets à fente avec un excellent rendement. |
A l’opposé du palonnier est fixé le même (libre) par une vis ou boulon sur le fond du servo et les deux palonniers sont raccordés par deux vis sur le support en POM (ou bois).
 |
Servo robotique Hitec
HSR-8498HB |
Pour cet usage j’ai trouvé que les servos utilisés en robotique convenaient parfaitement pour des volets de grande taille car leur conception intègre directement le palonnier commandé et le libre en opposition, c’est en général du matos costaud (et pas cher).
 |
 |
|
Autrement
la solution est très classique : articulation sur le support
en POM, ou bois dur et installation du servo en avant avec tringlerie,
l’avantage de cette formule, c’est qu’elle permet
de régler finement la course du volet en jouant sur le
différentiel de taille entre le palonnier du servo et celui
du volet. |
||
Fabrication d'une banderole
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||















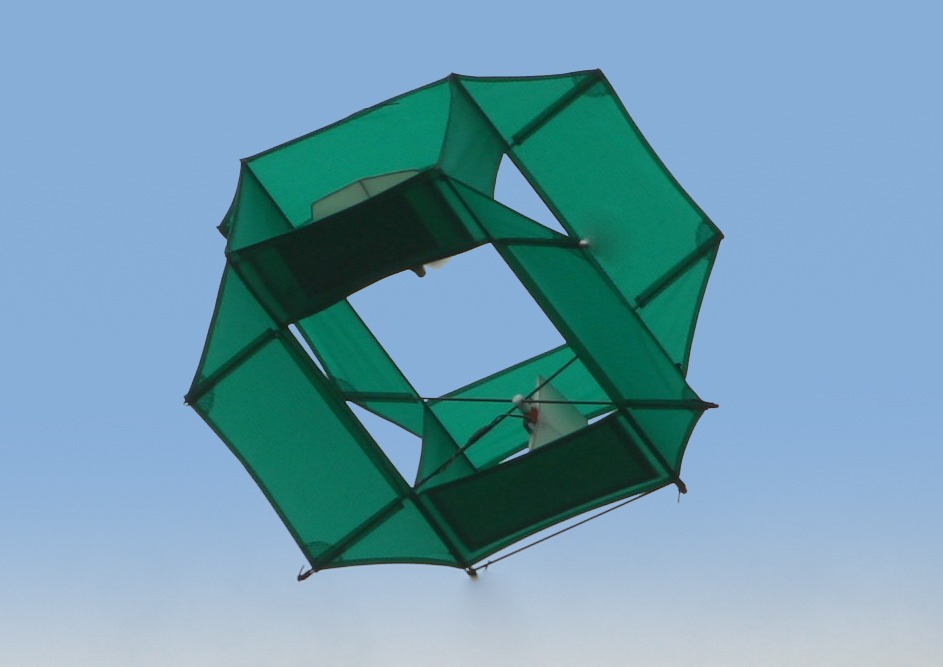
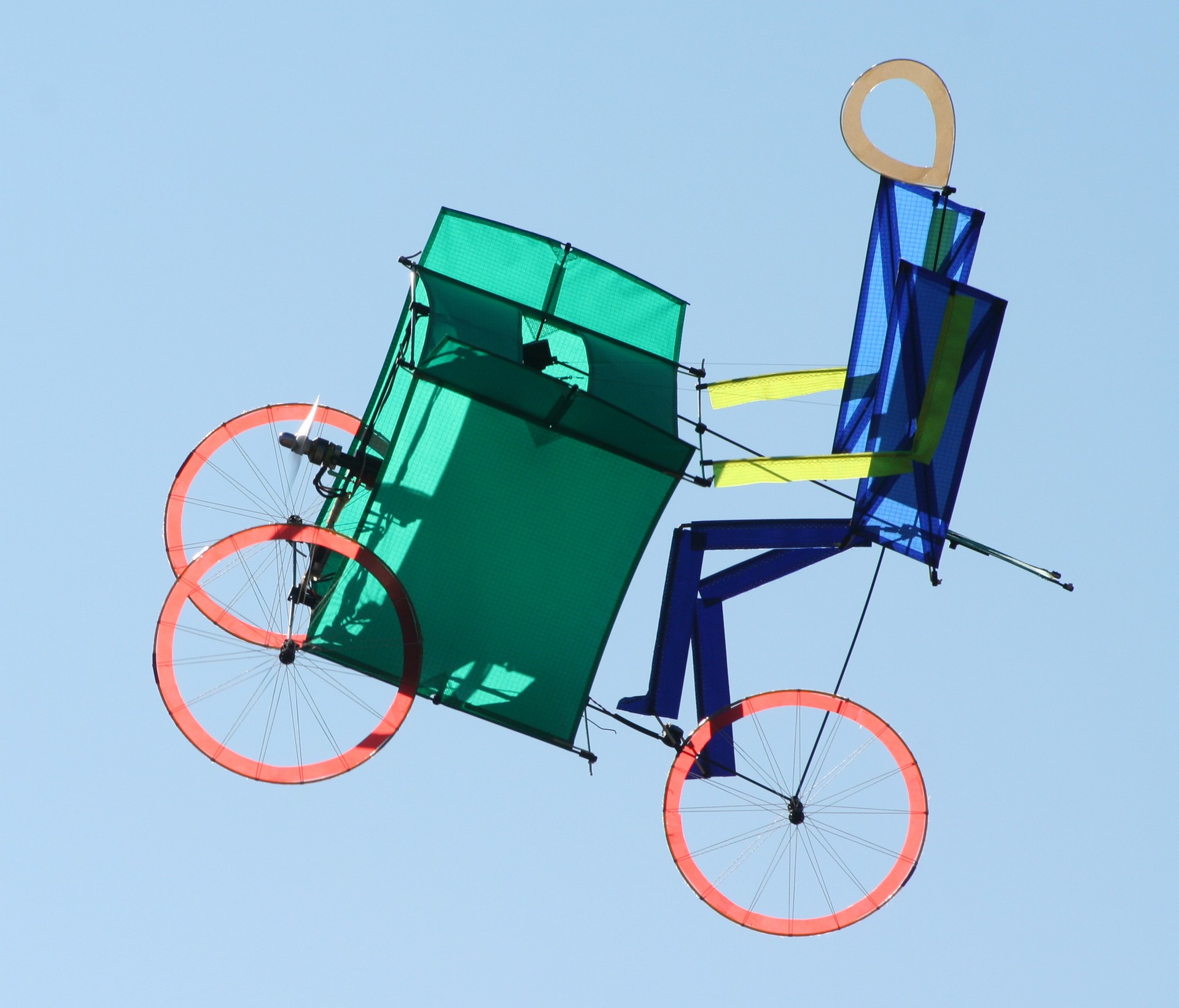
Pour terminer, l’avantage indéniable de ces cerfs-volants motorisés, c’est leur coté utilisation non conventionnelle, surtout qu’ils sont pratiquement indestructibles, ce qui permet de tester et essayer toutes les idées qu’elles soient déjà bien utilisées ou complètement farfelues !
Par exemple direction par moteur brushless positionné en travers avec un contrôleur de bateau avant/arrière, cerf-volant complètement cubique sans référence ni de haut/bas ni de couleur ! Ou la direction devient la profondeur et réciproquement en fonction de sa position en vol ! Extra pour se mélanger les pouces sur les commandes et quand la situation devient intenable, couper le moteur et le laisser tomber ou il veut… puis recommencer ! (je recommande)
 |
 |
|
C’est
là dedans que sont venues les idées et la réalisation
du Triporteur et du Cycliste mais ça c’est une autre
histoire… |
||
Un autre utilisateur... Patrick m'a très gentiment proposé d'essayer son Cloud Seeker. Depuis le temps que je vois voler ses scultpures insolites en tubes et toiles sans avoir pris le temps de m'y mettre à mon tour, j'ai accepté avec grand plaisir de piloter celui-ci et je n'ai pas regretté un instant. Bien sûr, il a fallu réfléchir un tout petit peu pour assembler les quelques morceaux de l'appareil démonté. Les tubes qui se croisent dans les supports moteur et dérive sont inhabituels, le moteur qui s'incline aussi. On se pose des questions sur les débattements, le centrage... Comment cela va-t'il réagir en fonction de l'inclinaison du moteur ? Et sur le terrain, on s'en pose encore en se demandant comment on va le lancer, comment ça va répondre ? Est-ce que ça va atterrir entier ? Et surtout, pas à des kilomètres du pilote, emporté par le vent... Finalement, dès les premières
secondes, on est rassuré. Déjà parce que
c'est hyper stable. Ensuite, parce que la puissance ne manque
pas, même lorsqu'il y a du vent. Et avec la charge alaire
ridicule, il n'y a aucun risque de casse.
Laurent Berlivet (Juillet 2020)
|
|||||||||||||||||||||







Un Cloud Seeker dans le ciel de Belgique (8 novembre 2020) La machine à coudre a été sortie, en applicant les conseils de Patrick.
Ci-dessous, le "planeur" terminé, pas encore équipé.
Début novembre, une belle journée sans trop de vent et donc les premiers essais de la chose.
Premier lancé, moteur à
fond. Cela monte très vite, presque tout droit. Mais
dès que j'essaie de lui faire faire quelque chose, il
fait n'importe quoi, mais pas ce que je lui demande. Beaucoup
de cabrioles dans tous les sens, et il s'éloigne dans
le vent. Je ralentis un peu le moteur ... les cabrioles continuent,
mais un peu plus calmement. Mais je suis loin, je ne vois pas
du tout dans quelle position il est, ni dans quel sens il va.
Finalement en faisant des "huit"
face au vent, moteur presque au ralentit, je maîtrise
un peu la chose.
Les quelques conclusions de cette journée
: Finalement, je suis très proche des commentaires de Laurent. Prochaines impressions à la prochaine belle journée sans vent, sans doute pas tout de suite !
Une journée froide mais sans vent, et me voila au terrain avec le Cloud Seeker et son moteur orientable dans les deux plans.
Rien qu'avec le moteur incliné à droite ou à gauche, il tourne lentement. Si on insiste avec plus d'angle, il plonge et il faut largement compenser à la profondeur. Et tant que le dosage exact des actions n'est pas "dans les pouces" cela donne des grimaces bizarres. Mais si on rajoute de la dérive, il faut donner moins de virage moteur, et le virage est plus beau. Fainéant, je rajoute un petit mixage "ailerons donne dérive". Une fois ce mixage bien dosé on peut faire de beaux virages sans toucher le stick de gauche. Et si on veut virer plus serré "à plat, style indoor" il suffit de mettre un peu de dérive en plus. Pas de vent du tout, et une bonne maîtrise du virage et on peut maintenant le placer exactement où on veut dans le ciel.
|








Contacter le signataire : patrick-blanc@jivaro-models.org
 |
| Ci-dessus, c'est un Cody de 240 cm d'envergure, à la géométrie un peu différente, disparu tragiquement sur la ligne HT derrière l'atelier... |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||