L’idée de départ de BigPix
est l’interaction entre le public et un engin volant nocturne.
Cette idée m’est venue lors de la rencontre modéliste
The Legendary Fat Fighters à Urbach mi-juillet 2022.
Lors de cette rencontre, où j’avais été invité
en tant que constructeur d’un Fatty F4U, j’ai découvert
en soirée les appareils nocturnes issus des créations
de Gérard Jumelin comme une Etoile
Filante, un cœur (L'Un
dans l'Autre) et un papillon multicolore ainsi qu’un paon
flamboyant. Je connaissais déjà les avions auxquels on
ajoute des LED pour le vol de nuit mais je n’avais jamais vu ce
concept où les LED sont le point de départ et où
la structure volante est construite en Depron pour servir l’éclairage
et non l’inverse. Dans le même temps je finalisais à Paris,
avec un groupe d’étudiants en informatique de l’ESGI,
un projet de lampe interactive à base de LED pilotées
en WiFi par le téléphone. Le court-circuit tombait sous
le sens : "faire voler une lampe interactive". Je disposais
de toutes les briques techniques, il ne manquait plus qu’à
imaginer l’engin volant.
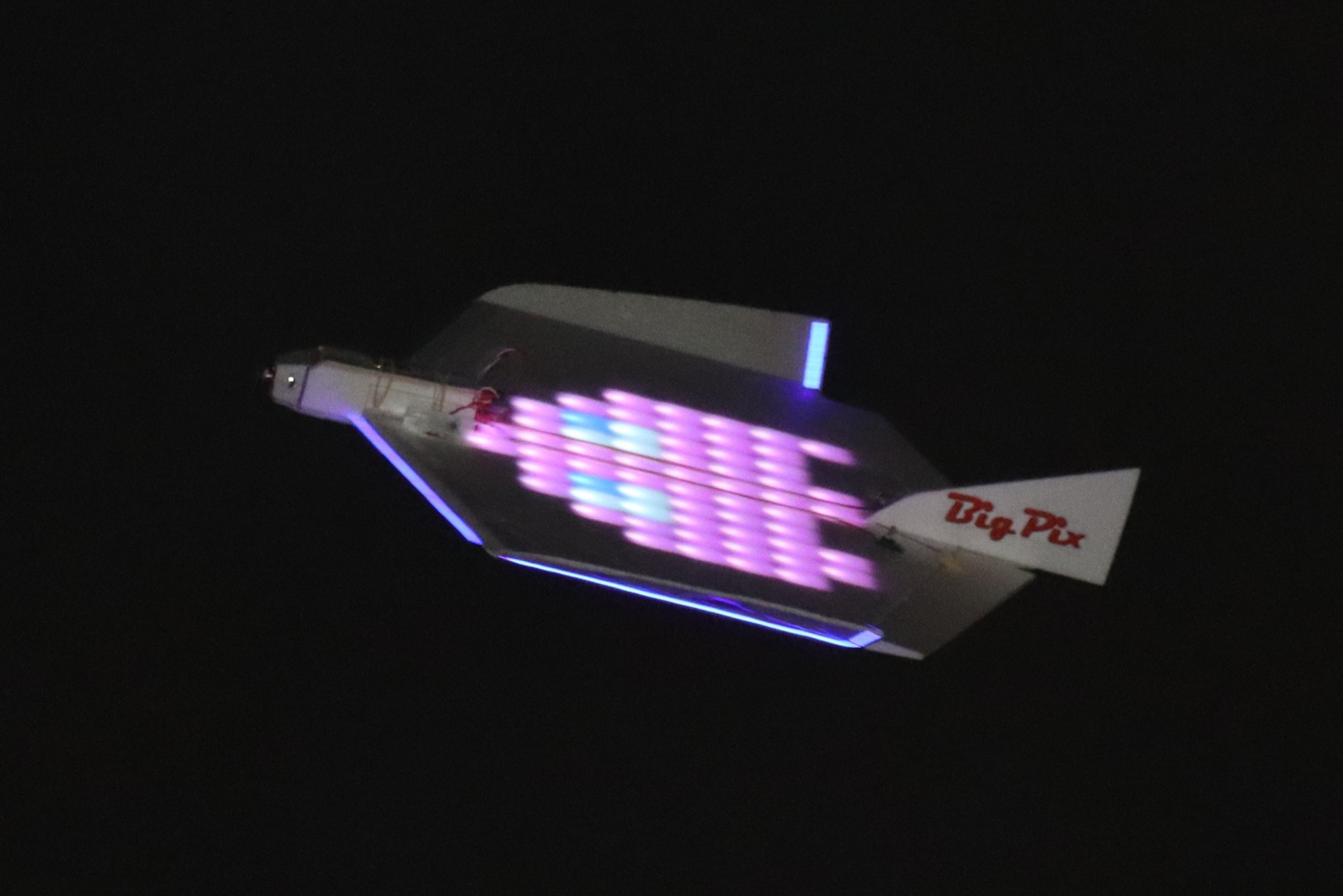
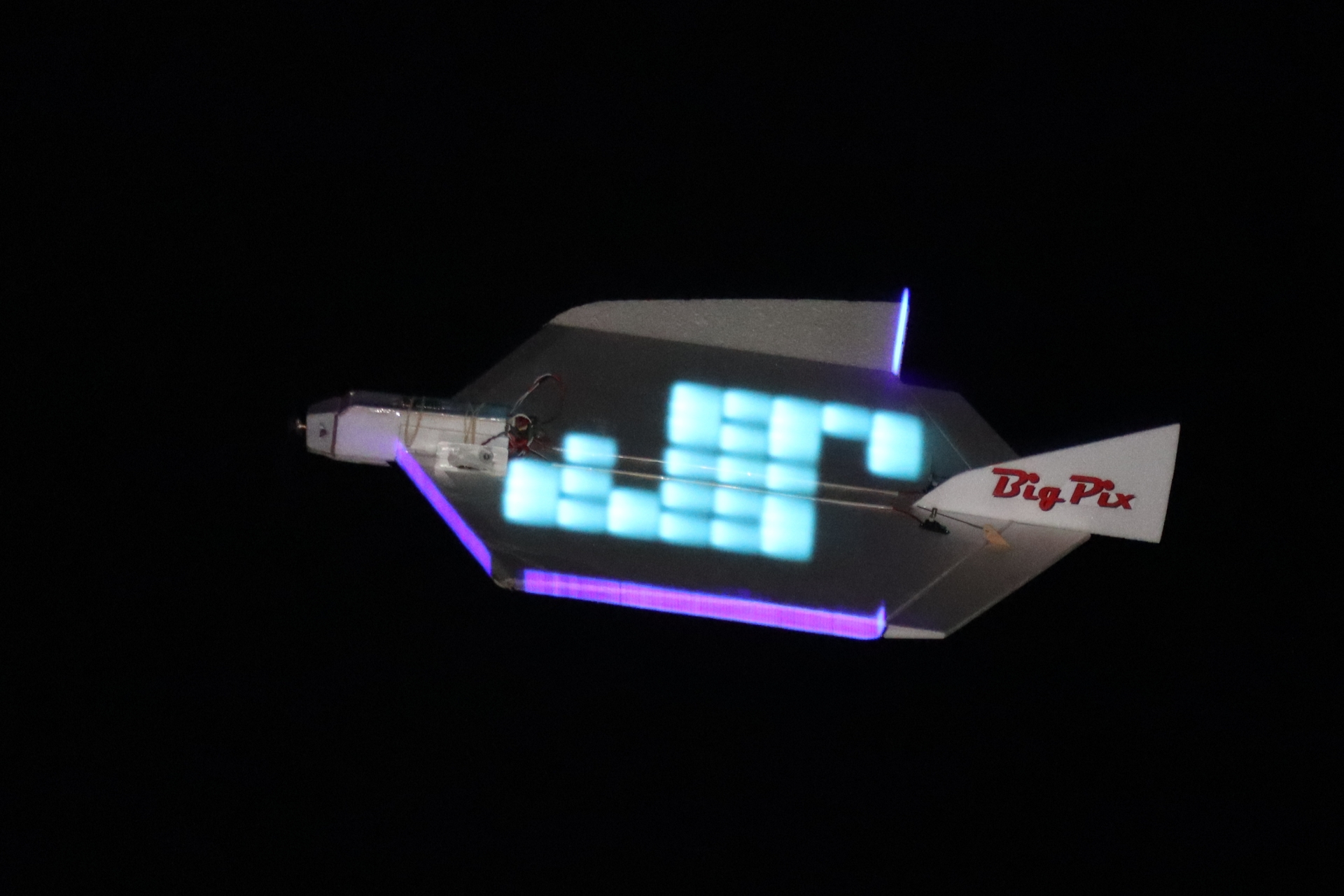
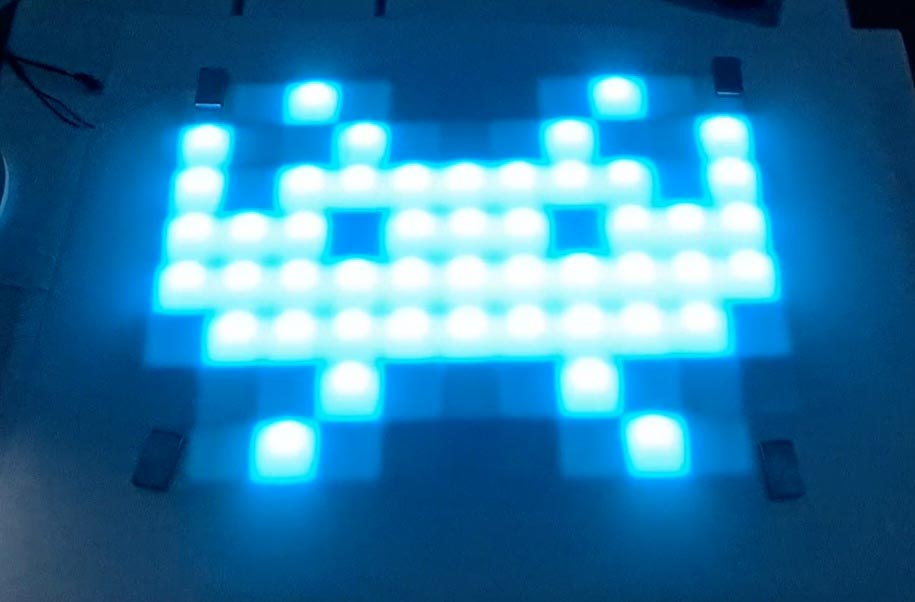
Les photos ne suffisent
pas pour se rendre compte de l'effet produit par ces LED pilotées.
C'est sur cette vidéo en vol de nuit que le BigPix dévoile
ses pixels animés.
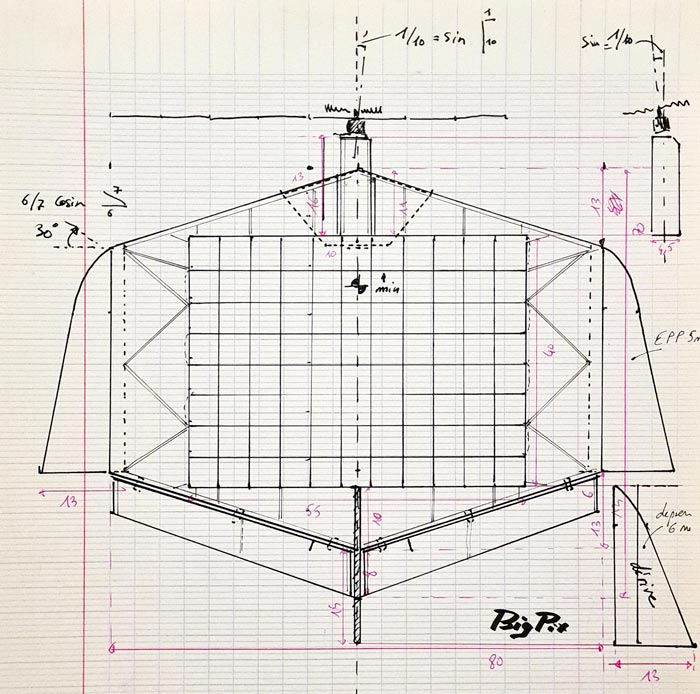
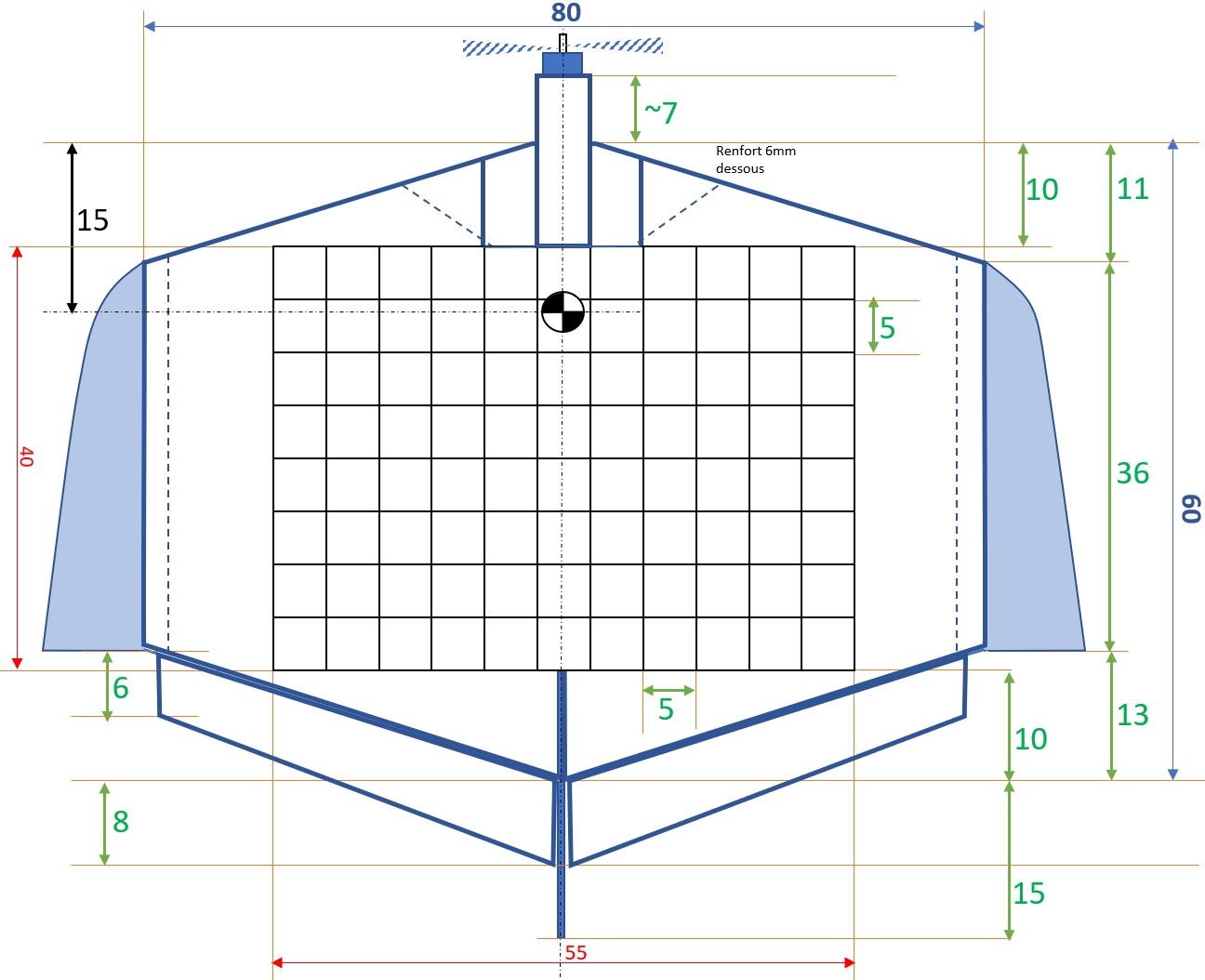
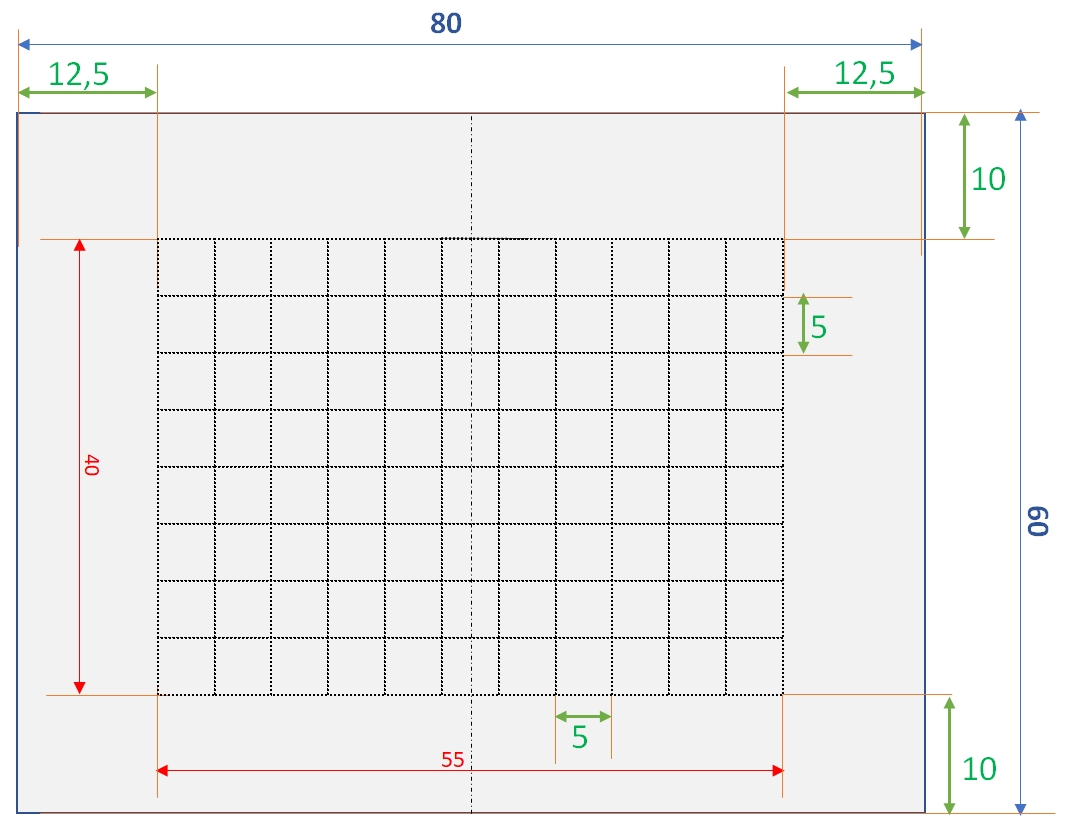
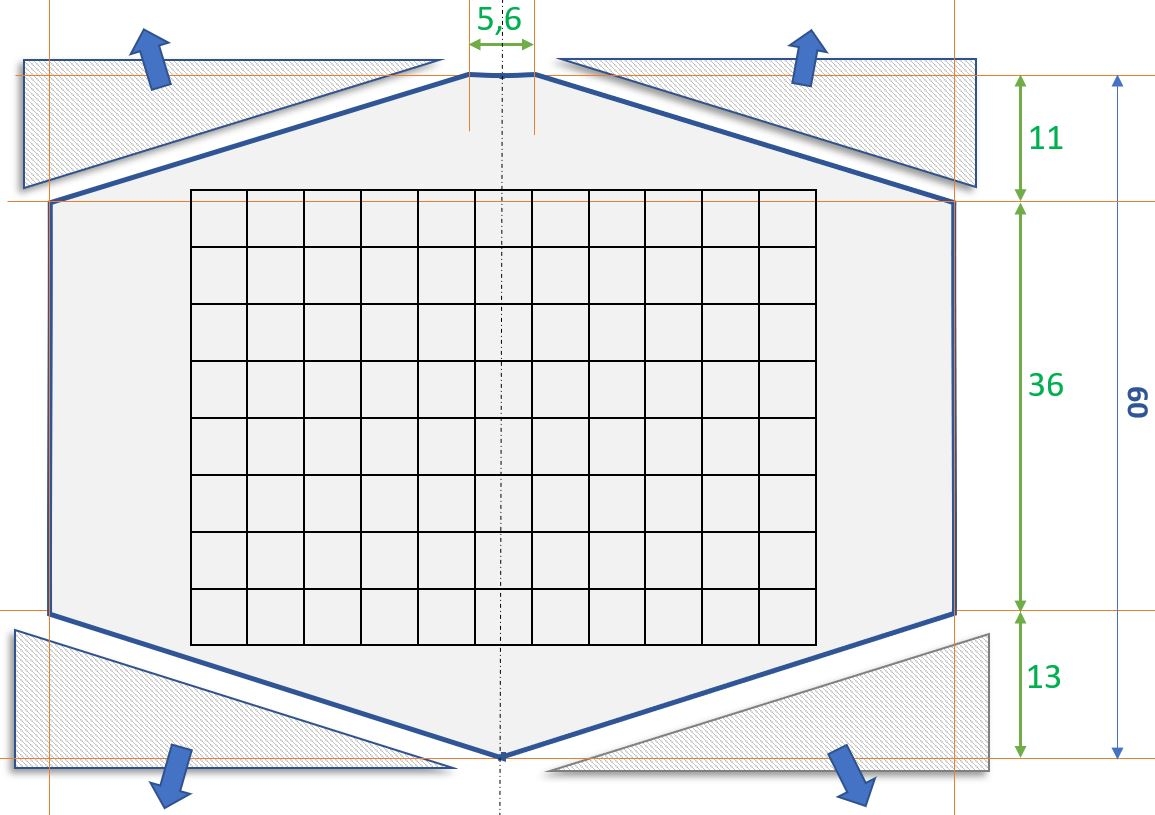
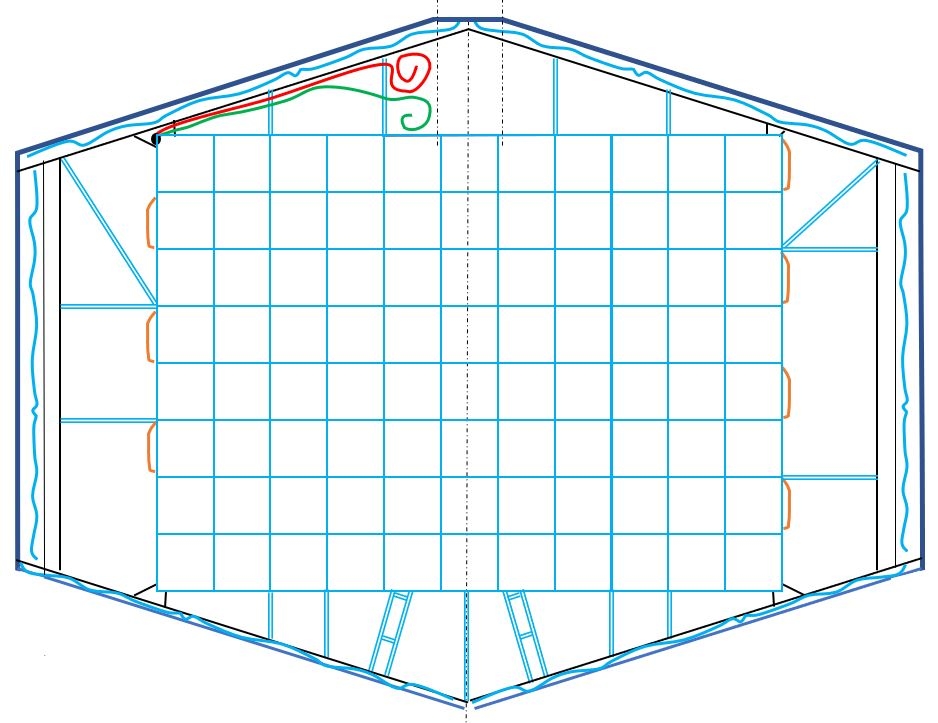
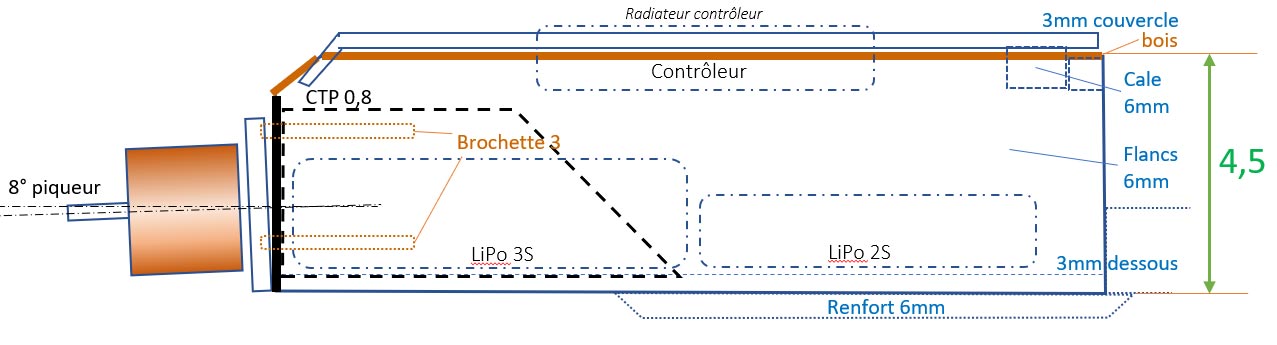
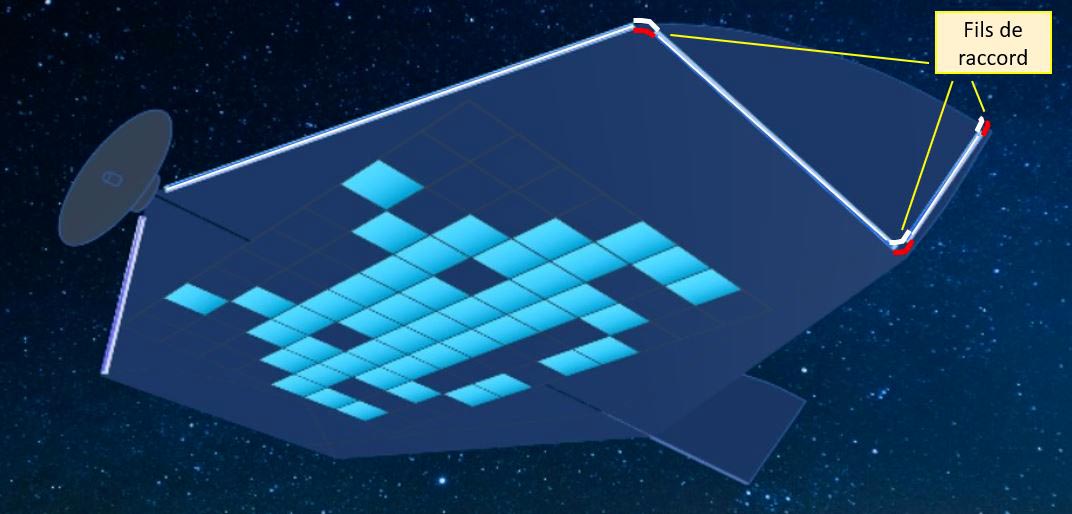
Ce plan annoté pourrait
suffire pour construire le BigPix car sa géométrie
n'a rien de compliqué.
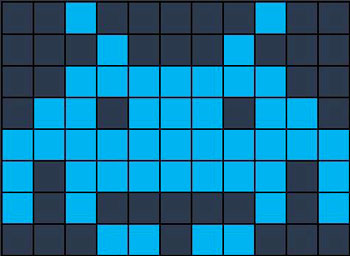
Assez rapidement le principe d’une matrice de
pixels s’est imposé et le projet est devenu "faire
voler un écran". Le choix des dimensions de la matrice 11
x 8 découle du motif des SpaceInvaders
dont j’avais déjà réalisé le code
informatique. Les bandes de LED RGB pilotables ont imposé une
taille de pixel de 5x5 cm d’où le nom BigPix trouvé
par le président de mon club d'aéromodélisme de
Colombes, Philippe Copigny. Il restait simplement à créer
la forme autour du rectangle de 55 x 40 cm, disque… octogone…
va pour un hexagone et je suis reparti du club avec un Hexafly sous
le bras comme modèle.
On était le soir du 7 août 2022 et l’appareil devait
voler pour Inter-Ex 2022 à Vittersbourg le 27 août. En
effet, Stephan Brehm, le coordinateur d’Inter-Ex et aussi membre
des Legendary Fat Fighters, m’avait invité tout en précisant
que ce serait bien de venir avec quelque chose de volant et d’original.
J’ai tout de suite commandé les LED puis testé la
programmation et le type de Depron pour faire les pixels. La matrice
était terminée le 11 au soir. La programmation des motifs
le 12. Premier vol le 18 au matin. Programmation du serveur Web et premier
vol de nuit interactif le 23, les derniers motifs comme « Matrix
» ont été codés pendant une étape
sur la route Paris - Vittersbourg où se tenait la rencontre.
Un grand merci à Stephan Brehm et à Philippe
Copigny pour avoir suivi le projet et donné de nombreux conseils
techniques.
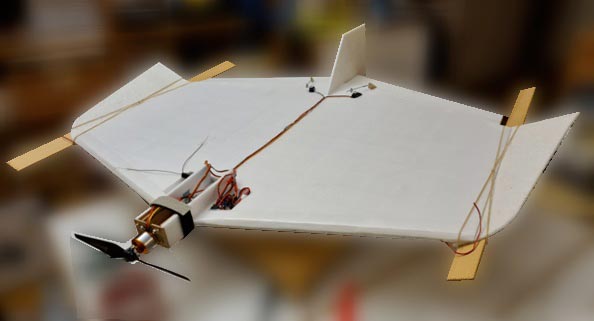
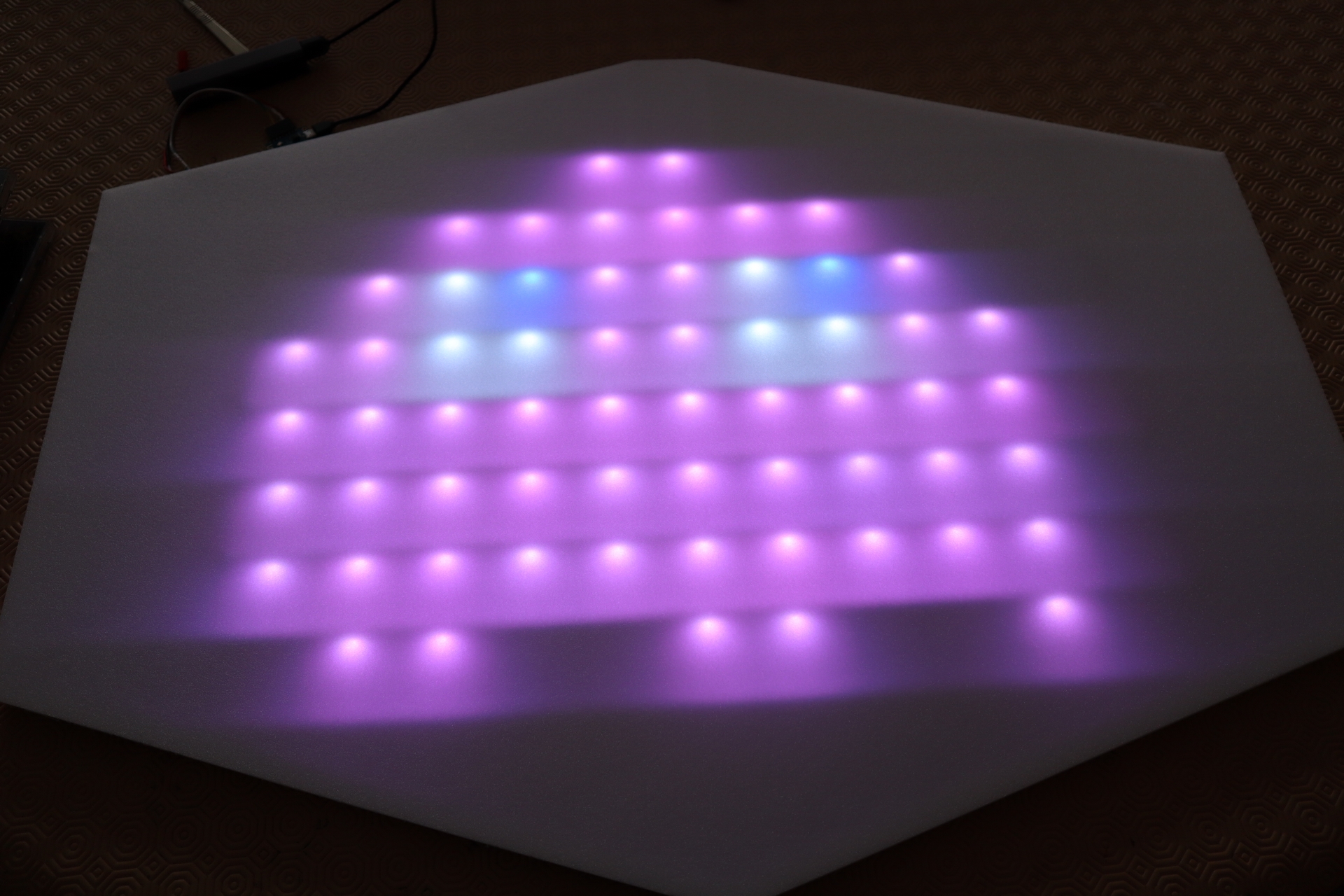
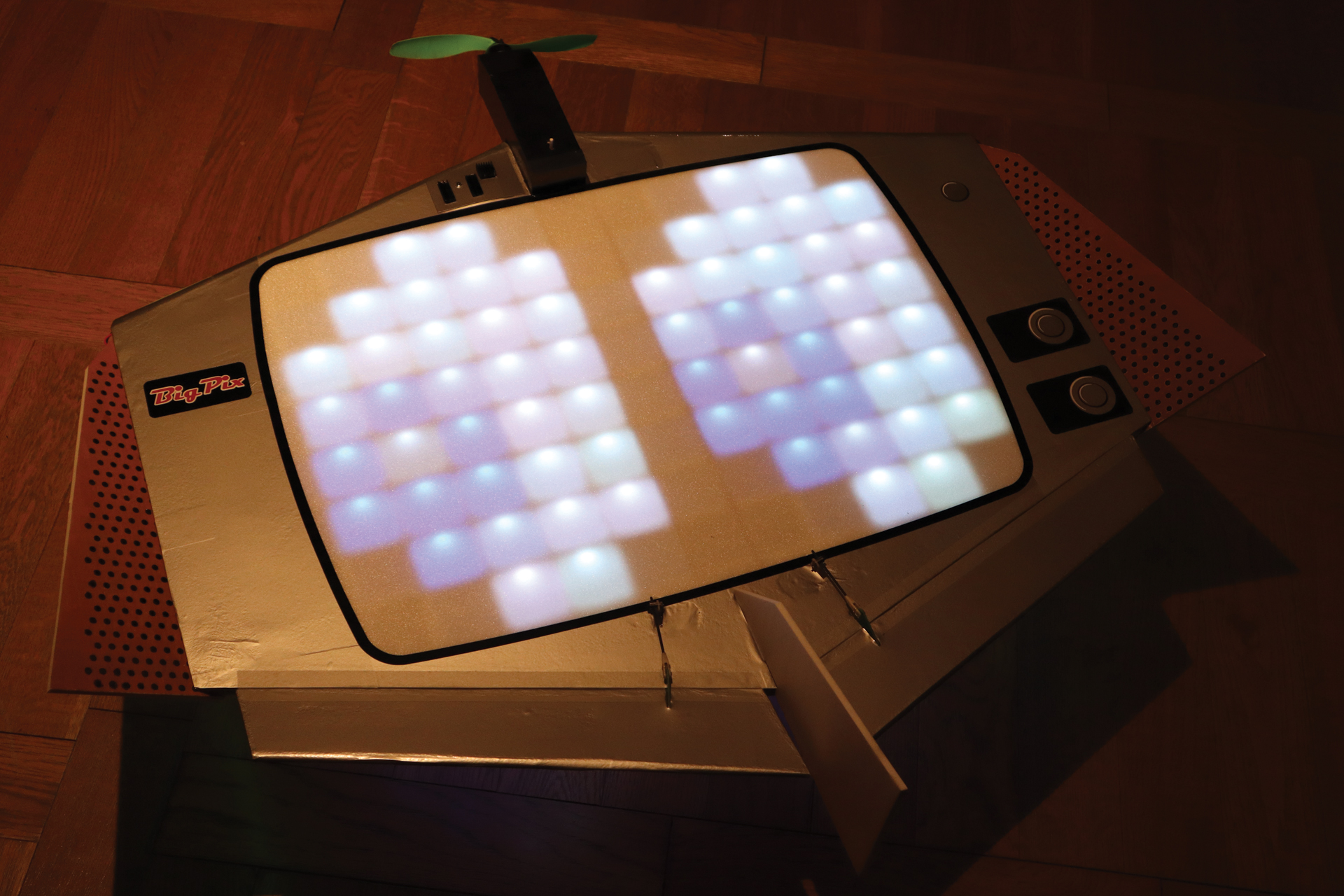
De jour, le BigPix cache son jeu. C'est
un hexagone d'un blanc immaculé. Par contre, tout change
à la tombée de la nuit, lorsque les LED affichent
leurs images colorées et animées.
Caractéristiques techniques
Envergure : 100 cm
Longueur : 80 cm
Poids : 646 g
Surface : 45 dm²
Charge alaire : 14,4 g/dm²
Radio : 3 voies avec mixage delta
Eclairage :
• Carte électronique : ESP8266 mini D1 (LOLIN ou Wemos)
• LED : 1 bande de LED RGB-WS2812b-5V-5m-300 LED sécable
toutes les 3 LED (max)
• Une bande de LED linéaire monochrome étanche
de 2m
• Composants électroniques : 2 réf. L7805CV,
une résistance 2.2 Ohm et une 75 Ohm (minimum 5W chacune)
• Batterie : Li-Po 2S 1400 mAh
Les motifs affichés peuvent être
modifiés à distance avec le Wi-Fi du téléphone.
En vol, ça fonctionne encore très bien quand le modèle
est éloigné d'une centaine de mètres.
Il faut bien sûr un peu d'informatique
pour faire défiler les images mais rien de compliqué.
Tout est expliqué étape par étape ci-dessous.
Le concepteur a déjà créé plusieurs
motifs.
L'heure du T...
Pour faire défiler un texte personnalisé
sur l'écran du BigPix, la clé est la lettre 't'
(comme dans texte...) suivie de ce qu'on souhaite afficher (sans
tenir compte de la casse, BigPix est majuscule...).
Voici un exemple à taper dans la barre d'adresse du navigateur
sur le téléphone :
Pour afficher BONJOUR, il faut écrire
http://10.1.1.1/tbonjour
Il y a en fait deux lettres clés "t"
et "T". Comme BigPix peut être vu de dessus ou
de dessous le texte va défiler en vue de dessous avec 't'
et vue de dessus avec 'T'.
Autre point : le texte ne sera lu que jusqu'au premier
espace, c'est pour ça qu'il faut ajouter des points entre
les mots dans les phrases pour les séparer. Ils ne seront
pas affichés.
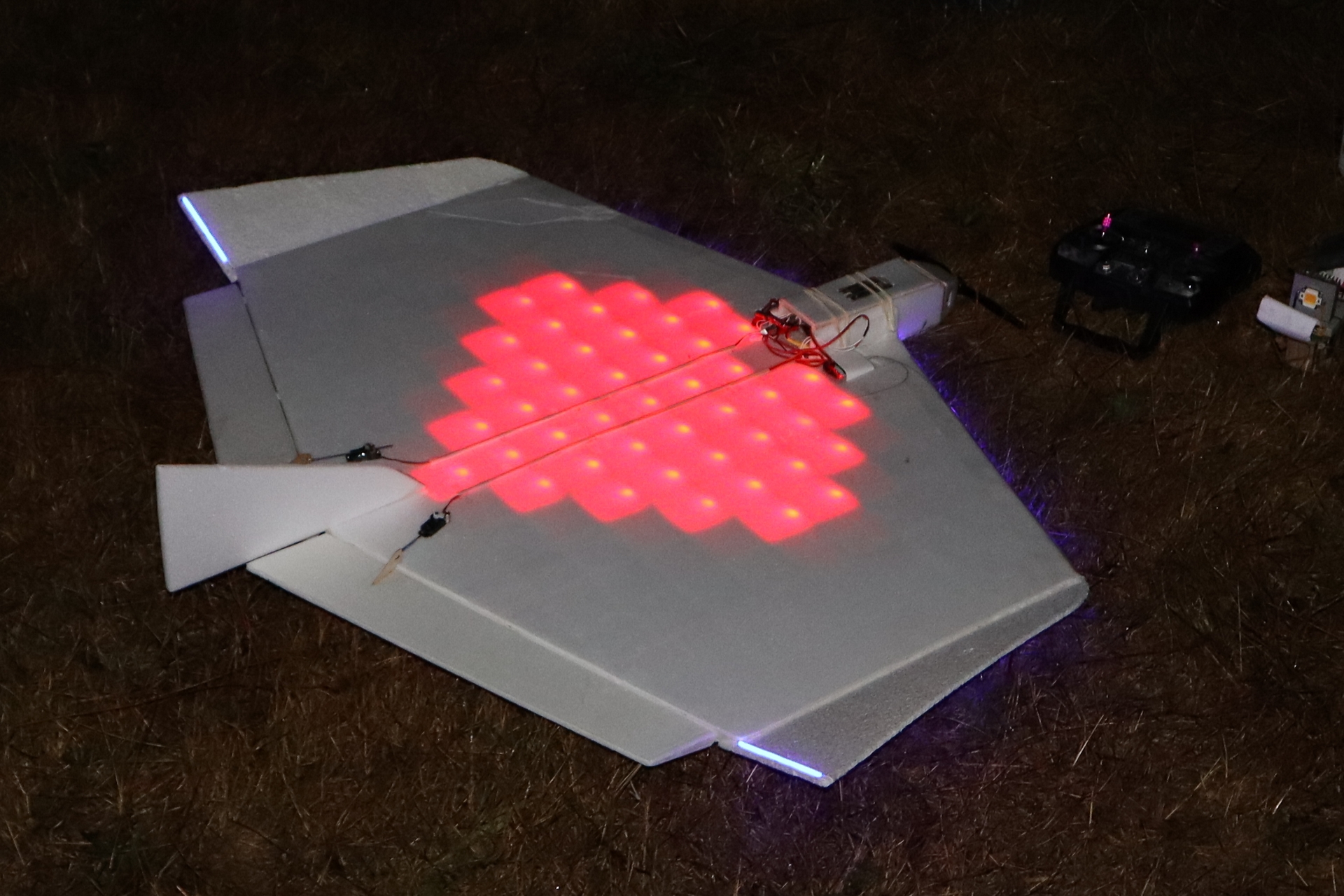
A la rencontre The Legendary Fat Fighters
d'Urbach en Allemagne. C'est de là que tout à commencé.
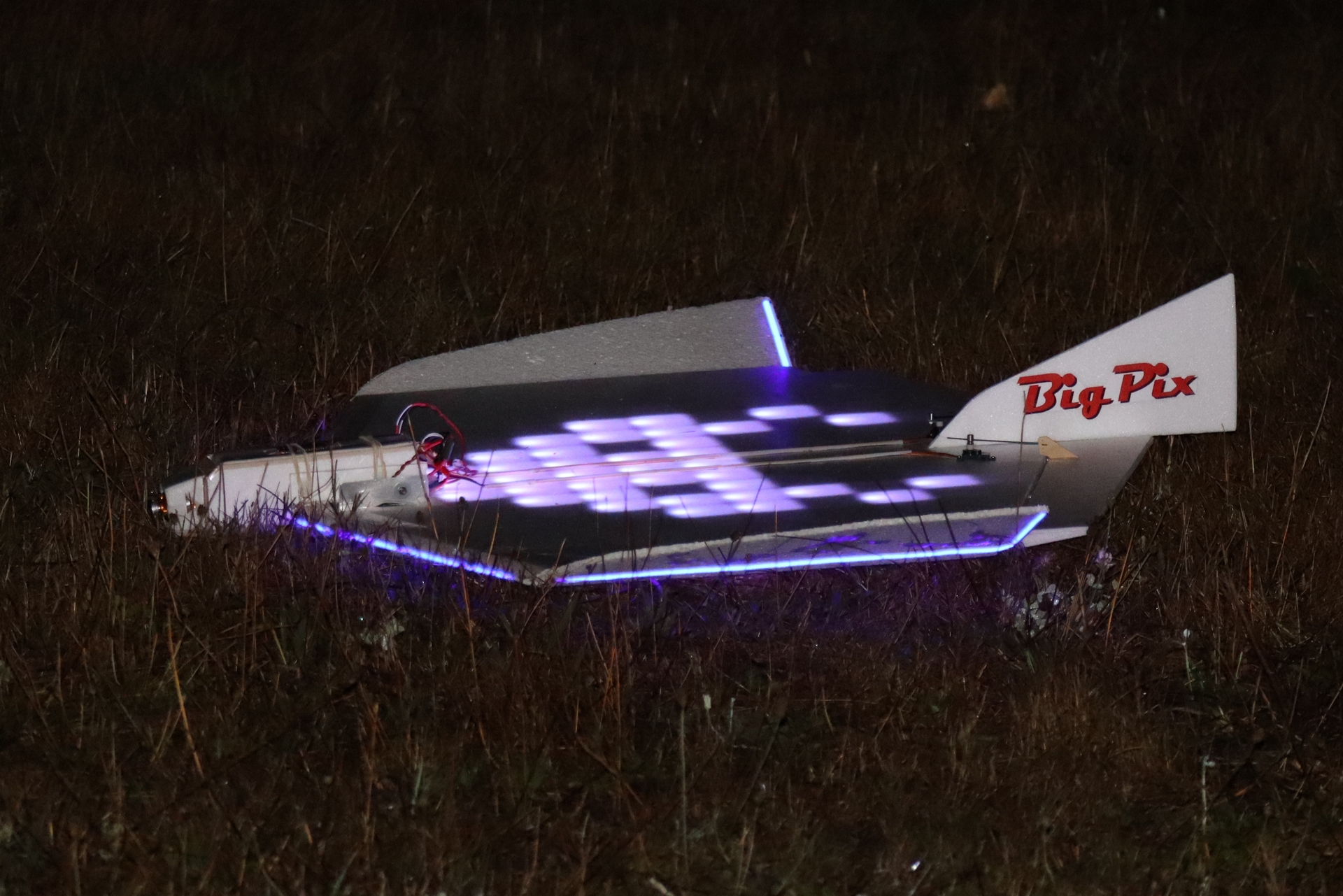
Ici, le coup de flash de l'appareil photo éclaire
le modèle. Dans la nuit, seul l'écran qui fait défiler
ses LED est visible, ainsi que les fines bandes au bord d'attaque
et sur les côtés qui permettent au pilote de bien idendifier
la position du BigPix.
Matériel
nécessaire
Eclairage
Une carte ESP8266 mini D1 (LOLIN ou Wemos)
Une bande de LED RGB-WS2812b-5V-5m-300 LED sécable
toutes les 3 LED (max)
Une Li-Po 2S 1400 mAh
Une bande de LED linéaire monochrome étanche
de 2 m
Deux composants L7805CV, une résistance 2,2 Ohm
et une 75 Ohm (min 5W chacune)
Un bout de métal d’environ 8x2 cm pour
faire le radiateur du L7805CV de la matrice
Structure
Du Depron 3 mm, une plaque de 80x120 (plus des chutes)
Du Depron 6 mm, une plaque de 60 x 50 (ou chutes)
De l’EPP de 5 mm, une plaque de 40x25
Du contreplaqué avion (CtP) de 0,8 mm pour le
bâti moteur et les guignols (10x20)
Du ruban adhésif transparent large (5 cm)
Un petit stock de touillettes en bois (15 cm) et une
brochette en bois de 2 ou 3
Motorisation, pilotage
Un moteur Brushless type A2212/15T 930KV
Un contrôleur 30A avec BEC 2A
4 vis à bois de 3x10 et 5 ou 6 rondelles de 3
Une hélice 10x8.5" (la mienne est une Graupner
eProp)
Une télécommande et récepteur,
mixable en mode "élevonse
2 mini servos 7 g, fils de rallonge servos et tiges
de commande
Une Li-Po 3S 1300 mAh
Matériel, consommables
Colle contact pour polystyrène (UHU Por, etc.)
Colle PU bois extérieur (Sader, Bostik, etc.)
Colle Cyano pour polystyrène et son accélérateur
en bombe
Fer à souder, soudure, câble électrique
de type “servo”
Réglet 1 m, mètre à ruban
Une équerre (ou n’importe quel moyen de
faire un angle droit)
Cutter et un stock de lames neuves
Perceuse type Dremel, forets et meules
Pour le collage de fermeture
Une planche de bois bien plate, minimum 70x80 (table)
Deux enclumes ou un stock de livres bien lourds pour
une bonne pression
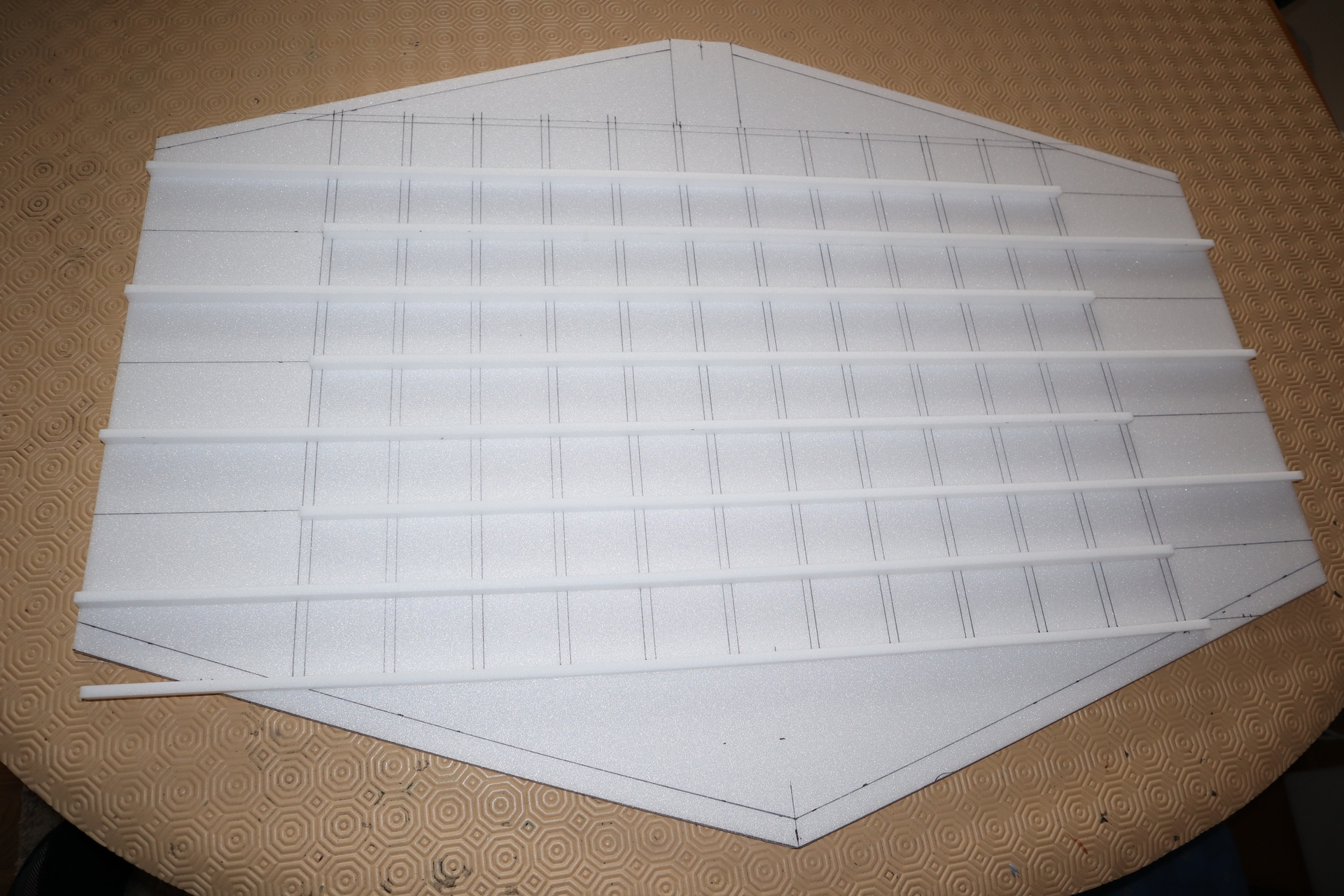
Les formes du BigPix restent simples.
L'aile est une planche qui enferme la matrice quadrillée.
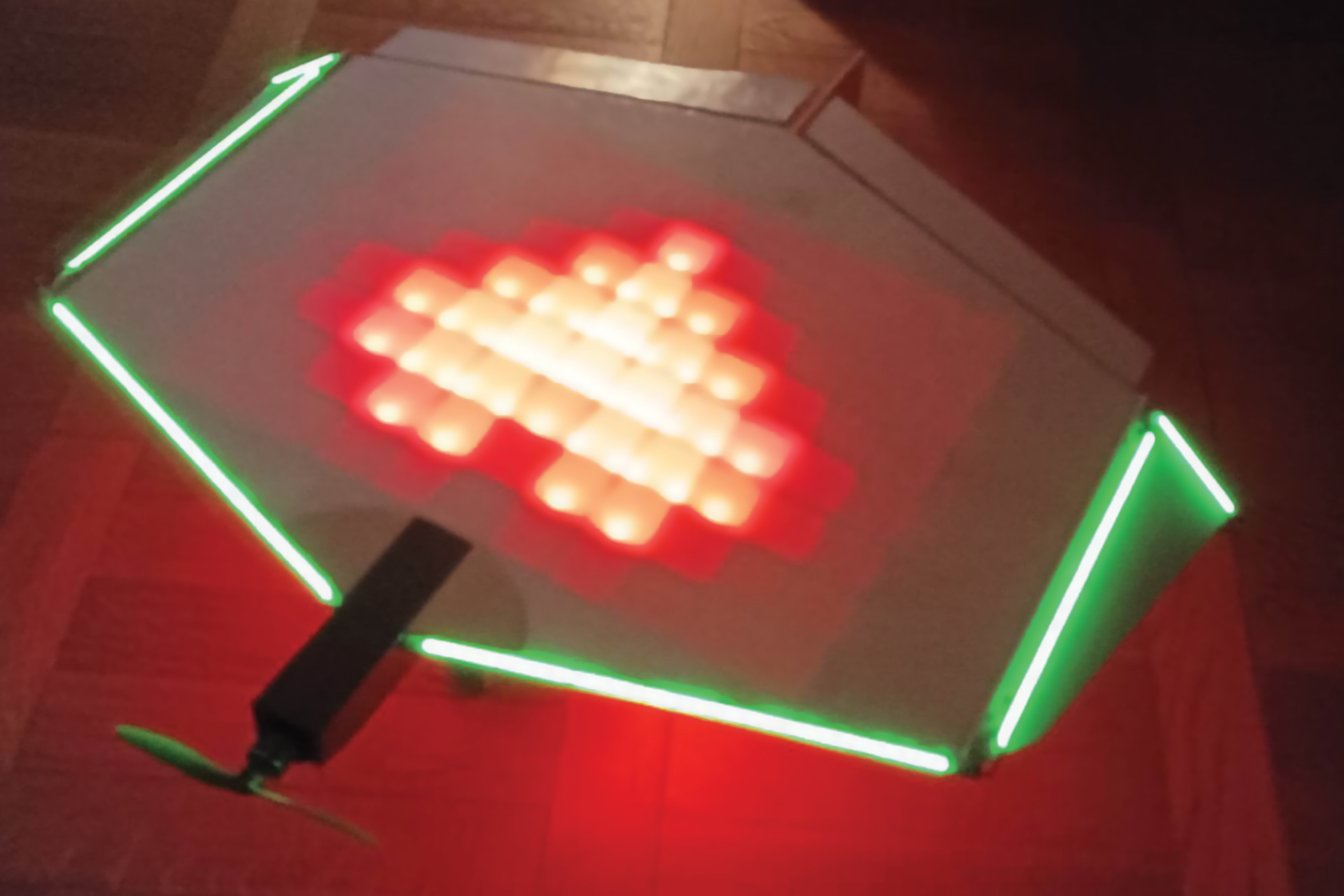
Light Painting sous les étoiles.
En vol à Savigny-sur-Orge
pour les 50 ans du club des Mouettes.
Motif arc-en-ciel en pointillé.
Le BigPix laisse envisager des photos intéressantes avec
exposition longue.
Processus général
La fabrication de BigPix ne présente pas de difficulté
majeure du fait des formes globalement droites et plates. C’est
une sorte de plaque en structure sandwich de type “nid d’abeilles”,
d’ailleurs le résultat final m’a surpris par sa rigidité
et sa solidité.
Il est clair qu’une partie de la construction est de l’électronique
voire même de l’informatique (on va commencer par ça)…
mais aucune compétence en codage n’est requise. Maintenant
si vous savez coder en Arduino alors vous pourrez créer vos propres
motifs et beaucoup plus, ou peut-être vous motiver pour s’y
mettre ?
En dehors des problèmes de manipulation du Depron, où
les risques de griffures sont permanents, quatre étapes nécessitent
une attention particulière car ce sont des points de non-retour
(sans gros chantier ou perte de matière). Ils sont mis en gras
dans les 17 étapes de construction ci-dessous :
1. Le chargement du programme dans l’ESP8266
et son raccord aux LED
2. La découpe de la planche de Depron 3 mm en deux 80x60 cm
3. La découpe et le montage des bandes horizontales de la matrice
en Depron 6 mm 4. La découpe de la bande de LED en bandes de 33 LED
puis soudure des raccords de 6 cm (ne pas se planter dans les fils)
et collage sur les bandes horizontales
5. La découpe et le collage des entretoises de la matrice en
Depron 6 mm
6. La découpe des coins de l’hexagone et le collage du
pourtour et des renforts
7. Le recouvrement complet du dessous de BigPix par du Scotch transparent
8. La mise en place des fils de pilotage des LED de la matrice 9. La fermeture de la boîte
10. La confection des élevons
11. L’assemblage des composants d’abaissement de tension
des Li-Po à 5V
12. La découpe à 45° du dessous du bord d’attaque
pour coller la LED linéaire 13. La découpe de la bande de LED linéaire et
le raccordement de ces bouts
14. La découpe à 30° du dessous des côtés
pour coller les ailettes
15. La construction et la mise en place du berceau moteur + Li-Po
16. La mise en place des servos et du récepteur
17. La découpe et le collage des ailettes et de la dérive
INFO : Toujours commencer par vérifier
que toutes les pièces et les plaques de Depron sont propres
(ça se nettoie à l’alcool à brûler
qui efface aussi les marques “Depron”).
Et ensuite, vol de nuit comme disait… ? … Arsène
Lupin !
L'informatique
Initialiser l’ESP8266
La toute première étape est informatique. Pour initialiser
l’ESP8266, le plus simple est d’utiliser l’outil
Arduino IDE, gratuit et bien documenté.
Installer Arduino IDE depuis le site https://docs.arduino.cc/
ou taper “install arduino IDE” dans un moteur de recherche.
Une fois le logiciel installé, une icône
doit apparaître sur le bureau. Lancer l’outil, puis
sélectionner :
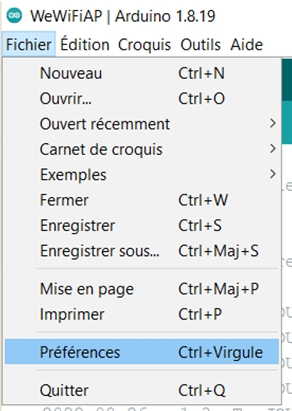
"Fichier > Préférences…"
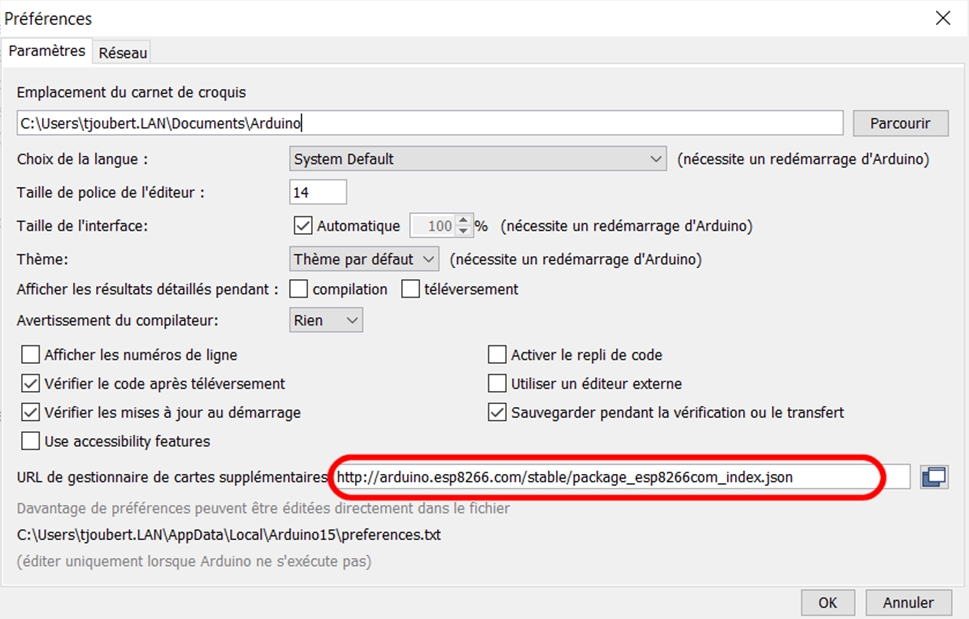
Une nouvelle fenêtre s’ouvre, dans la case “URL …
cartes supplémentaires” écrivez :
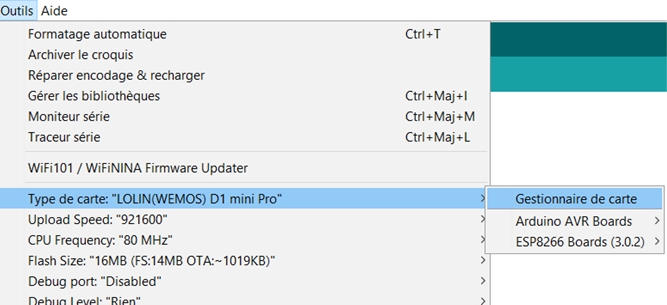
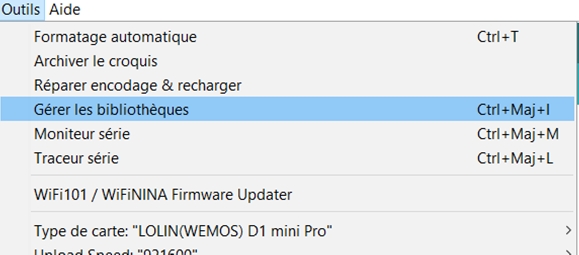
Ensuite avec la souris sélectionner "Outils ? Type
de carte : … > Gestionnaire de carte"
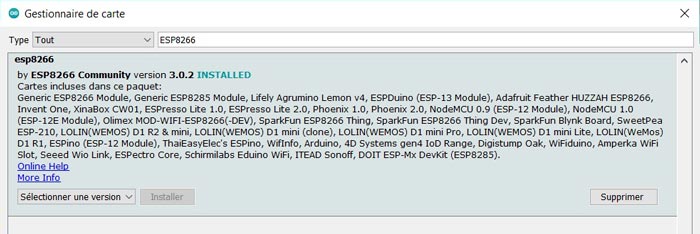
Ecrivez ESP8266 en haut dans la barre de recherche,
la carte doit apparaître comme ci-dessous, sélectionner
la version 3.0.2 puis cliquer sur le bouton "Installer".
Après un petit moment, la carte ESP8266 apparaît comme
"INSTALLED", vous pouvez fermer cette fenêtre.
Il n’y a plus qu’à connecter votre carte ESP8266
au PC avec un câble USB micro-B, puis à sélectionner
le bon type de carte et vérifier le port de communication.
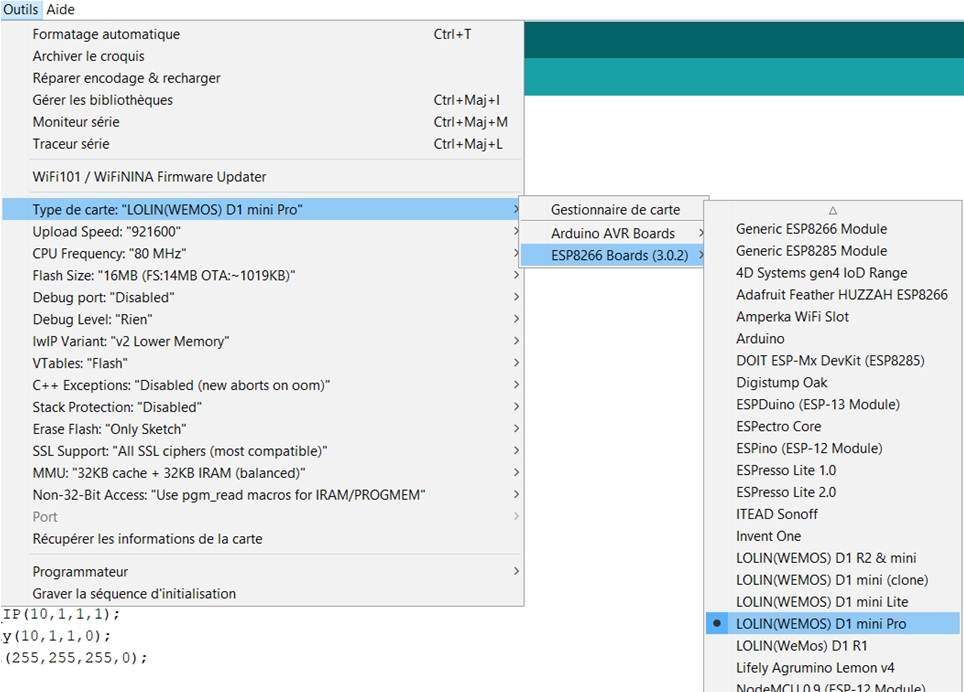
Sélectionner :
"Outils > Type de carte… > ESP8266 Boards (3.0.2)
> LOLIN (WEMOS) D1 mini Pro"
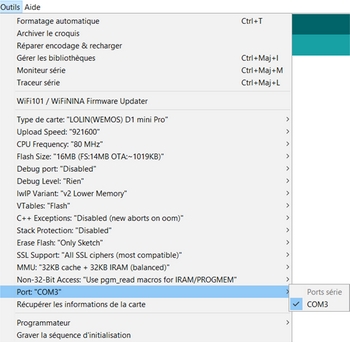
Ensuite Sélectionner :
"Outils > Port"
Et vérifier que dans la liste “Ports série”
il y a bien un port qui est coché, ça prouve que
la liaison USB marche bien (COM3, COM8, COM11… ça
dépend de votre PC).
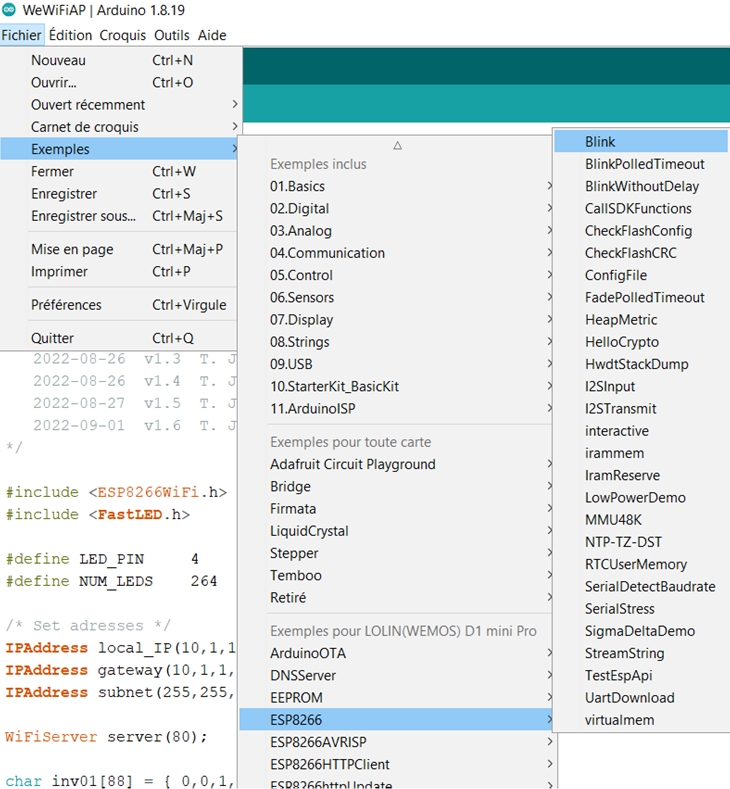
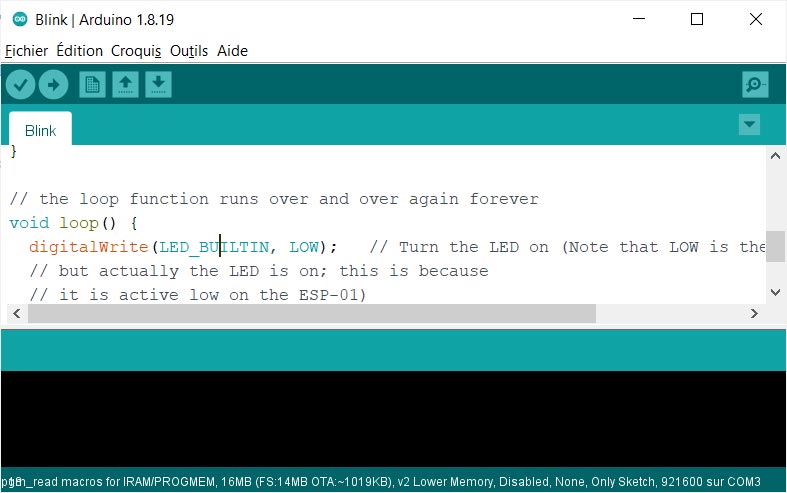
A cette étape, vous pouvez vérifier que tout marche
en chargeant dans votre ESP8266 un programme simple - “Blink”
- qui fait clignoter la LED bleue sur la carte.
Sélectionner "Fichier > Exemples > ESP8266
> Blink"
Le programme "Blink" apparait dans une nouvelle fenêtre.
Pas besoin de comprendre le programme, dans cette fenêtre, cliquer
sur :
"Croquis > Téléverser" (ou
l’icône flèche du bandeau d’outils)
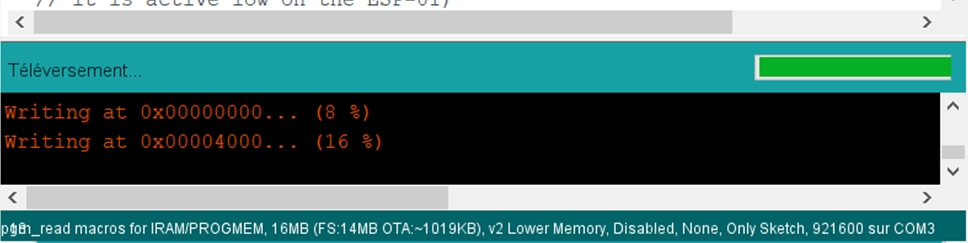
Le programme est préparé puis envoyé dans la
mémoire de l’ESP8266, on voit les étapes se dérouler
en rouge dans la fenêtre du bas avec une barre de progression
verte qui avance :
A la fin on lit "Hard resetting via RTS pin…"
et la LED bleue de la carte ESP8266 se met à maintenant clignoter
lentement.
NOTE :
Les petits curieux peuvent lire le programme et même remplacer
les nombre 1000 et 2000 par le nombre 500, puis re-téléverser…
ça va clignoter plus vite.
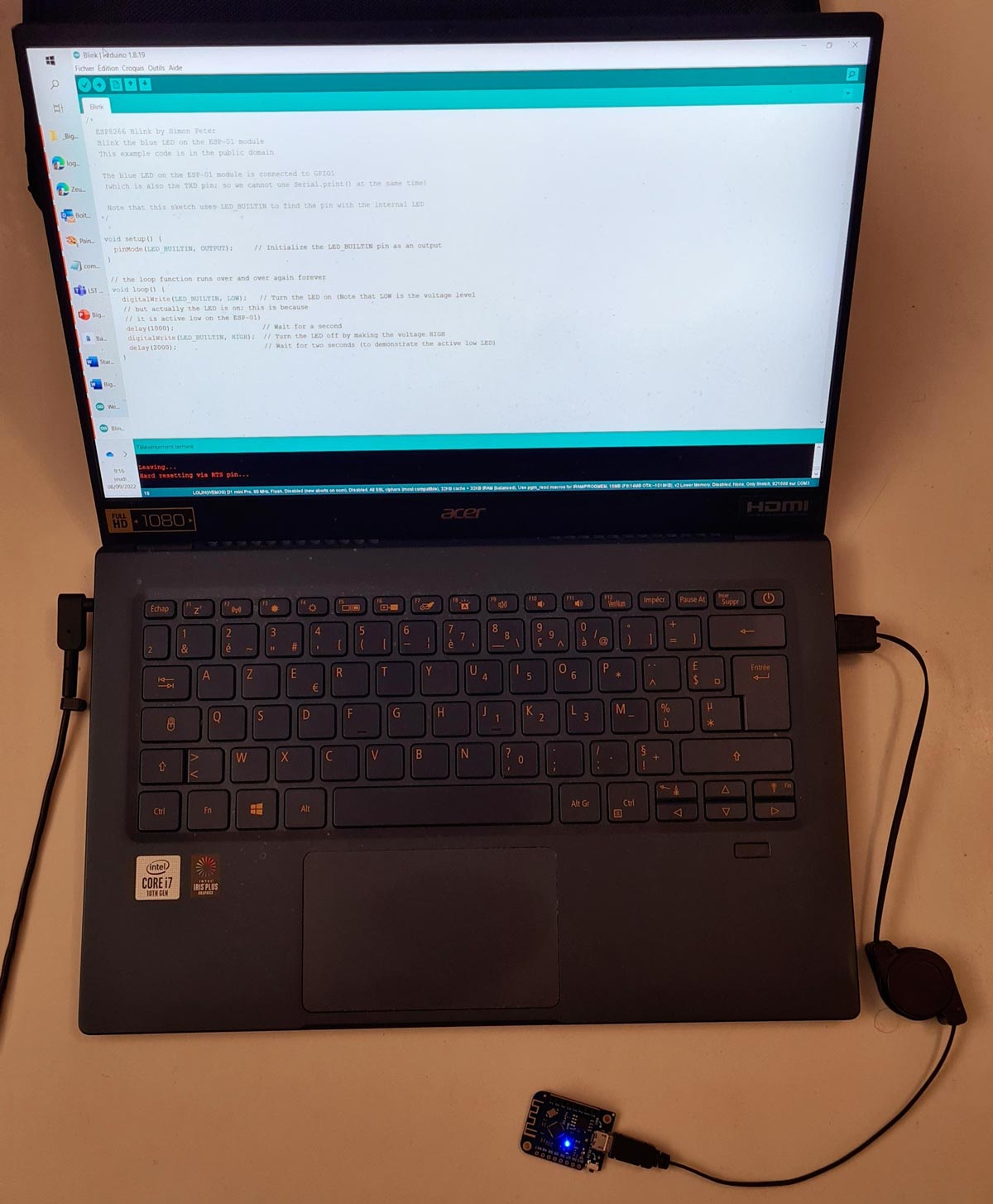
On peut noter que le programme est maintenant gravé
dans la carte ESP8266. Si on la débranche du PC pour la brancher
sur une batterie USB… elle clignote.
Installer la bibliothèque FastLED
Le logiciel BigPix utilise la bibliothèque
Arduino “FastLED” pour piloter les LED RGB, il faut
donc l’installer.
Sélectionner : "Outils > Gérer
les bibliothèques"
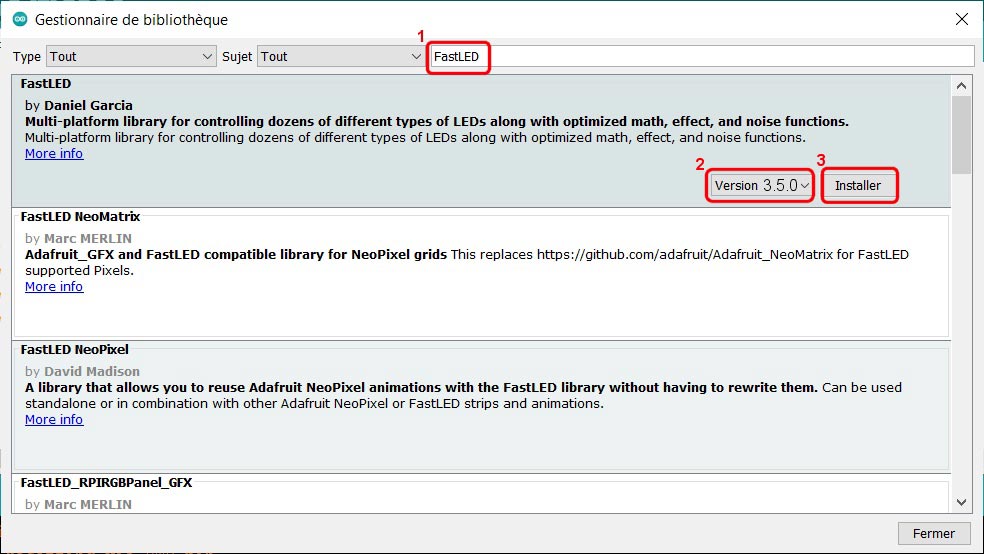
Dans la fenêtre qui apparait, taper FastLED
dans la barre de recherche en haut :
Une liste de bibliothèques apparait. Celle utilisée par
BigPix est celle dont le nom est simplement "FastLED"
éditée par Daniel Garcia. Sélectionner la version
3.5.0 et cliquer "Installer".
Après quelques secondes la bibliothèque FastLED apparaît
comme "INSTALLED".
Charger le programme BigPix
A la place de "Blink", on va maintenant graver "BigPix"
dans l’ESP8266.
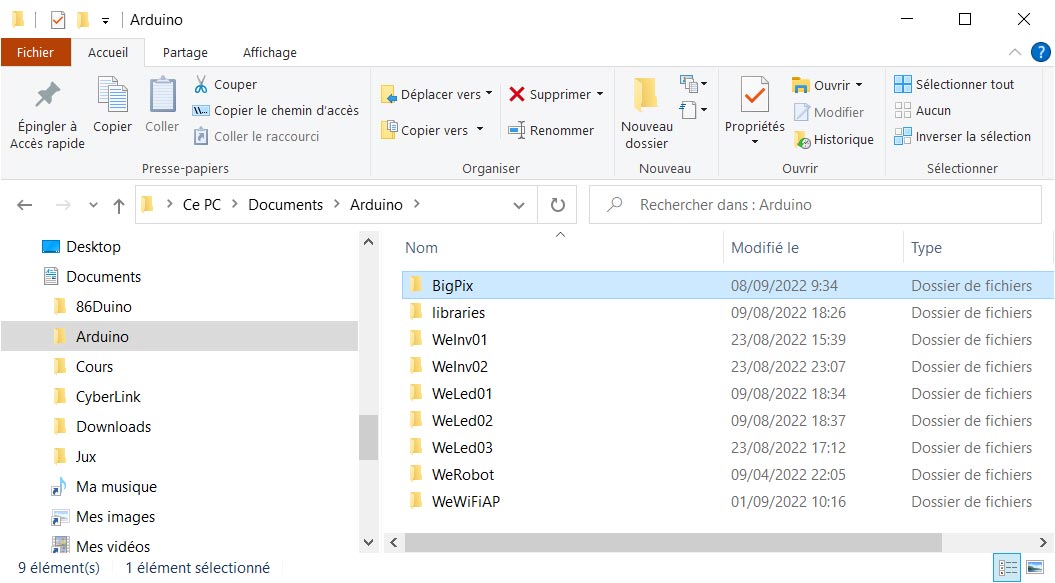
Il faut récupérer le fichier "BigPix-master.zip"
(Cliquer ici pour le télécharger)
puis le décompresser sur votre PC, par exemple dans le dossier
Documents/Arduino/BigPix (bien conserver le dossier
BigPix et ne pas simplement mettre BigPix.ino dans le dossier Documents/Arduino).
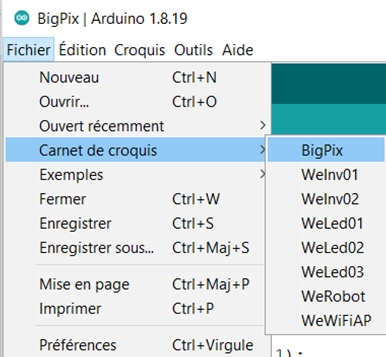
A partir de là, BigPix doit apparaître dans votre liste
de croquis
Sélectionner : "Fichier > Carnet de croquis"
Le croquis BigPix est visible.
Si vous avez mis Le dossier ailleurs que sous "Documents/Arduino"
alors il faudra sélectionner :
"Fichier > Ouvrir"
Puis naviguer jusqu’au dossier BigPix.
Vérifiez que votre ESP8266 est bien branchée au PC via
USB puis cliquer sur "Croquis > Téléverser"
(ou l’icône flèche du bandeau d’outils) comme
vous l’avez fait avec “Blink”. A la fin de l’opération
votre ESP8266 est maintenant chargée avec le programme BigPix.
Il ne se passe pas grand-chose et c’est normal, BigPix ne fait
en effet plus clignoter la LED bleue comme Blink.
La partie informatique est maintenant terminée, il est temps
de passer à un peu d’électronique.
Piloter les LED RGB
Il faut maintenant que le programme BigPix pilote les LED. Tant que
cette étape ne marche pas… ce n’est pas la peine
de continuer ? On va donc brancher la bande de LED RGB sur l’ESP8266
(en respectant les ATTENTION ci-dessous
et en n’inversant aucun fil !).
Au début de la bande de LED RGB, on trouve 5 fils :
Deux fils d’alimentation de puissance
à souder (5V rouge, GND blanc)
Trois fils de commande et d’alimentation
basse puissance
Les fils rouges et blancs de ces deux prises sont reliés entre
eux. Cela veut dire qu’il faut éviter de mettre deux sources
d’alimentation différentes d’un côté
et de l’autre. Une seule source à la fois :
soit la Li-Po
soit l’ESP8266 alimentée via
un câble USB
Evitez d’avoir branché en même temps la Li-Po et
le câble USB sur l’ESP8266.
ATTENTION : Ne jamais mettre plus
de 5V sur les fils rouges, vous risquez de perdre définitivement
la bande de LED ainsi que l’ESP8266 ! Or précisément
c’est un risque non négligeable quand on manipule de
nuit des Li-Po de 8V et 12V.
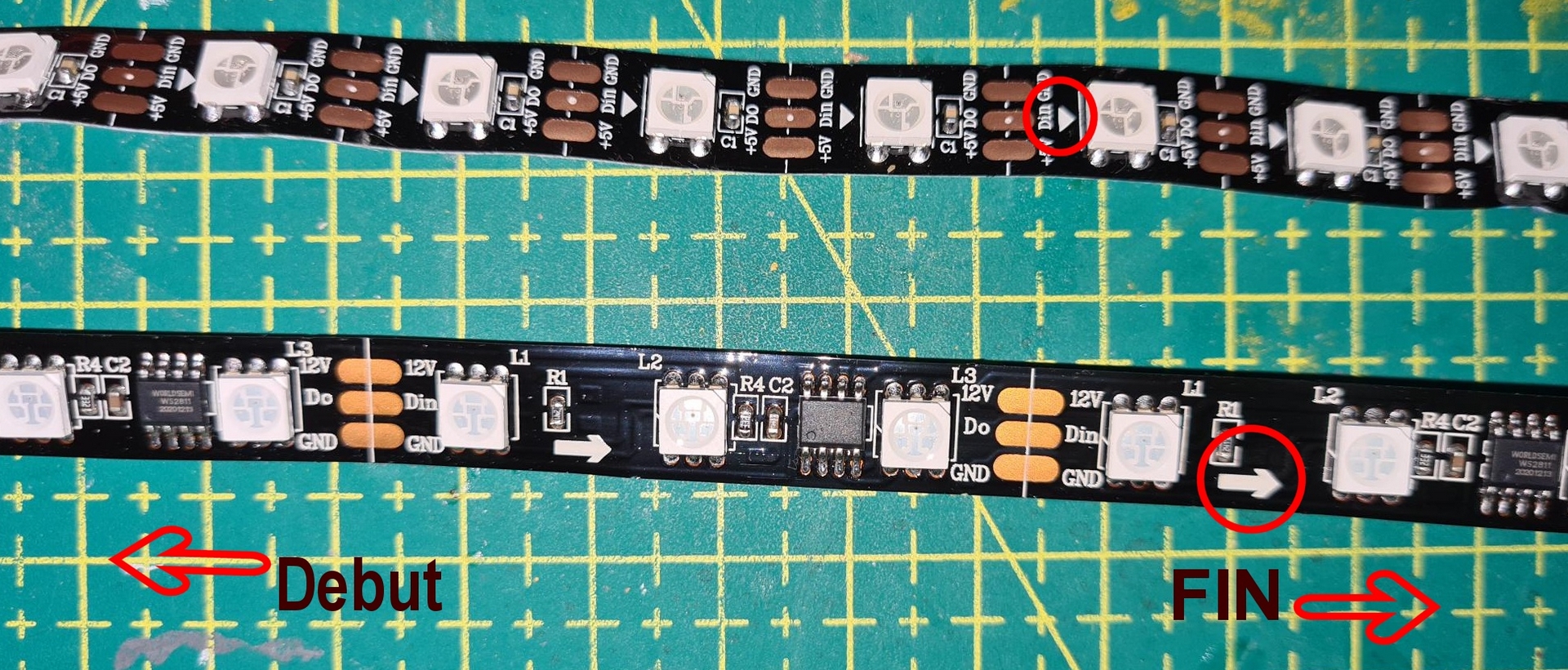
Contrairement aux bandes de LED classiques, les bandes de LED RGB WS2812b
ont une direction : il ne faut pas confondre le début
et la fin (qui a aussi 5 fils pour les connecter entre-elles et faire
ainsi de très longues guirlandes).
Les revendeurs livrent normalement des bobines qui commencent par le
début et il faut tout dérouler pour trouver la fin, mais
une petite vérification ne fait pas de mal. Il y a normalement
sérigraphié sur la bande une petite flèche qui
indique le sens.
Pour tester l’éclairage BigPix, on va connecter le début
de la bande de LED RGB. En reliant les trois fils de commande à
l’ESP8266 comme indiqué ci-dessous :
Rouge sur 5V
Blanc sur GND
Vert sur D2
Il y a plusieurs techniques pour relier les fils à l’ESP8266,
on peut les souder directement mais du coup on ne pourra plus débrancher
facilement (pourquoi pas…?). Mon choix a été de
souder un connecteur femelle sur l’ESP8266 et un connecteur mâle
coté LED RGB. Ces deux connecteurs sont disponibles dans le sachet
de l’ESP8266.
ATTENTION : Quand on branche ou
débranche des fils sur l’ESP8266 ou la bande de LED
RGB il est fortement conseillé de le faire HORS TENSION.
On commence donc toujours les manips par le petit refrain "Dé-braaaannn-che
tout !..." (débrancher l’USB côté
PC).
Si on a téléversé le logiciel dans l’ESP8266,
quand on branche celle-ci avec un câble USB micro-B sur une source
d’alimentation (le PC ou une batterie USB) alors les LED vont
s’allumer et le motif vert d’initialisation (une LED sur
trois) va défiler.
Quand cette étape fonctionne, vous avez fait le plus compliqué
du projet BigPix
Conservez cette configuration pour faire des tests tout au long du
montage de BigPix.
Le Depron et la colle
Vues générales
BigPix peut être réalisé sans plan, tout est plat
et droit, deux mesures se répètent un peu partout :
13 cm et 5 cm.
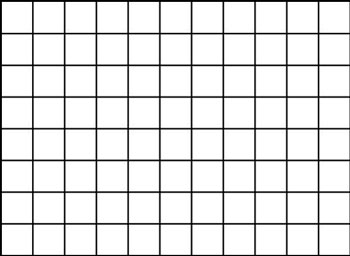
Confectionner la matrice
Le cœur de BigPix est une matrice de 8 lignes et 11 colonnes
qui délimite 88 cases carrées de 5x5 cm, chacune de ces
cases est équipée de 3 LED RGB et peut donc afficher :
255x255x255x3 = 49 744 125 couleurs ! (mieux que les meilleurs
écrans).
La construction de cette matrice se fait sur une moitié de
grande plaque de Depron 3 mm de 120x80 tout juste coupée donc
en deux rectangles bien droits de 80 x 60 et c’est normalement
un rectangle aux coins bien droits. Il est ainsi aisé d’y
dessiner la matrice 8x11 en prenant des mesures avec une équerre
à partir des bords, comme dans le schéma ci-dessous :
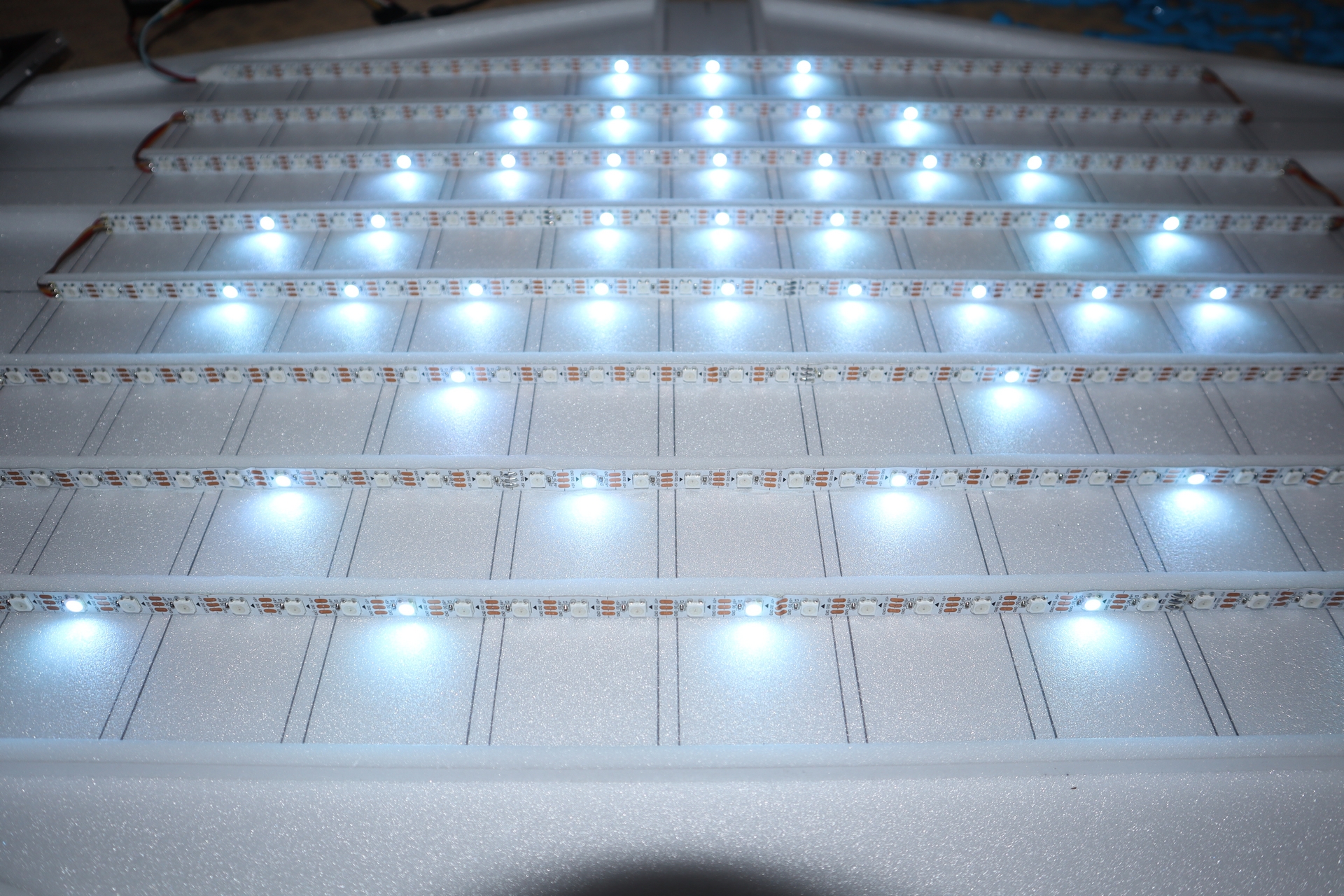
Après avoir tracé les lignes de la matrice, on va la
réaliser. Commencer par découper 9 bandes de Depron 6
mm de 56 cm de long avec la largeur de votre bande de LED RGB –
a priori 9 mm mais le fait de mesurer sur la bande de LED élimine
toute surprise. On voit ci-dessous ces bandes horizontales avec leurs
LED sur une matrice bien avancée.
Coller ensuite les 9 bandes horizontales à leur place et sur
un des côtés de 6 mm. J’ai utilisé de la colle
contact, si vous faites de même, attention de toujours bien racler
la colle contact avant séchage sinon elle fera “chewing-gum”.
Procéder bande par bande, laisser sécher 5 mn au moins
puis coller les bandes bien droites et bien en place. Eviter de tirer
dessus, ce qui aurait pour effet de faire une matrice en “cuvette”.
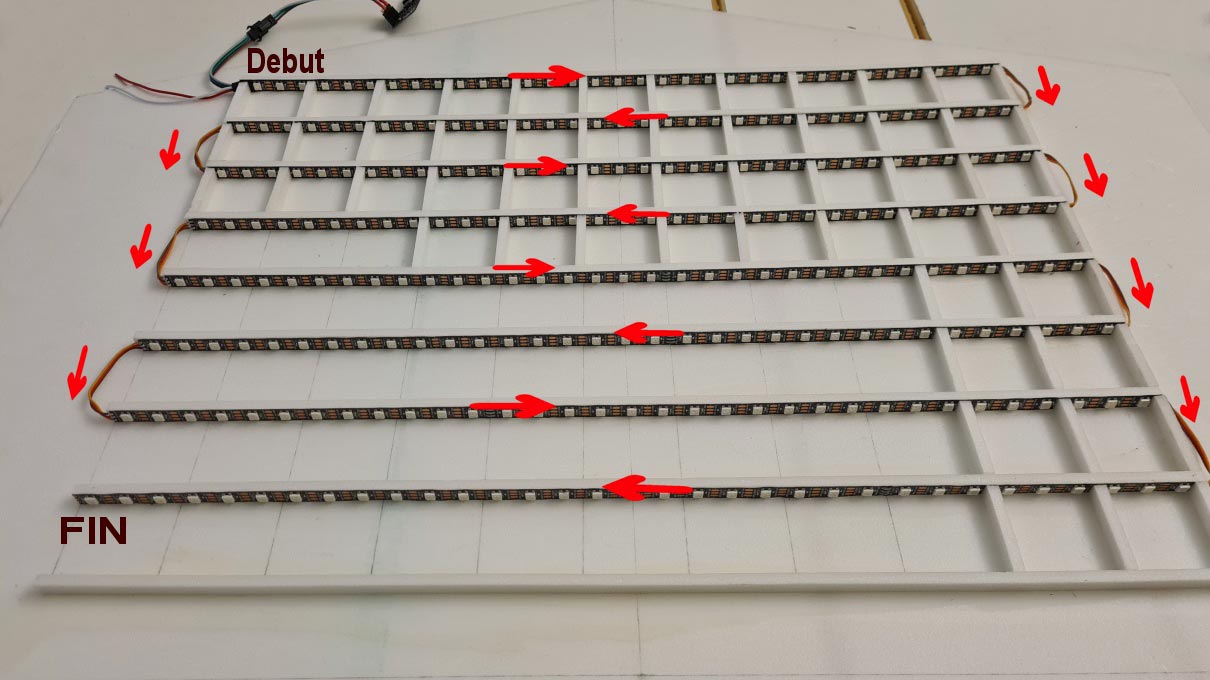
Une fois les 9 bandes horizontales en place, on va coller des LED sur
les 8 du haut comme dans la photo ci-dessus (la 9e bande ferme la matrice).
NOTE : Le début
de la bande de LED RGB doit se situer en haut à gauche quand
on regarde dans le sens du vol, c’est-à-dire à
l’avant gauche. Si on ne respecte pas ce positionnement les
LED ne vont pas s’éclairer conformément au motif.
Dans le ruban de 300 LED mesurant 5 m, on va progressivement couper
huit bandes de 33 LED (55 cm) que l’on va relier entre-elles en
soudant des fils de 6 cm de long (j’ai utilisé des câbles
de servos qui ont 3 fils). Ne pas prendre des fils trop fins car le
courant doit parcourir toute la guirlande.
Quand vous soudez les 3 fils entre les bandes de 33 LED, bien relier
5V avec 5V, GND avec GND et D0 avec Din.
Le sens de parcours de la bande RGB est indiqué dans la photo
ci-dessous :
Je conseille de couper une seule bande à la fois et de souder
les fils de 6 cm qui la relient au reste de la bobine avant de la coller
au Depron (fer à souder et Depron ne font pas bon ménage…).
Quand la bande est soudée, alors la coller en place sur la bande
horizontale… puis passer à la suivante.
CONSEIL : Pour éviter
les mauvaises surprises dues à la découpe et à
la soudure, je fais ce travail avec l’ESP8266 reliée
et opérationnelle. A la fin de chaque étape de soudure
je branche l’ESP au PC et je fais un test de figures pour
vérifier que je n’ai rompu aucun lien.
Quand toutes les bandes horizontales sont équipées
de leurs LED, alors découper les 96 longerons en Depron
6 mm pour finaliser le quadrillage
Pour ce faire, je découpe des bandes plus longues et je
fais la découpe finale in-situ.
Il y a en effet toujours des légers écarts à
la mesure exacte.
La colle que j’ai utilisée pour ces longerons est
la PU, en enduisant bien les longerons puis en raclant légèrement
pour ne pas laisser de surplus de cette colle qui est un peu lourde
et gonfle terriblement.
Je mets toujours un poids pendant les premières heures
de séchage pour éviter les déplacements liés
à ce gonflement.
Lorsque la matrice est terminée (de l’ordre d’une
journée de boulot) on peut la tester en déposant la plaque
restante de Depron 3 mm dessus et en branchant l’ESP au PC.
Connecter un téléphone au réseau WiFi “BigPix”
puis tester les motifs en tapant 10.1.1.1 dans le navigateur ou la barre
de recherche (selon les modèles).
Fabriquer l'hexagone
On peut maintenant procéder à la découpe de la
forme finale, bien mesurer sur les côtés 11 cm de découpe
pour le haut en ayant marqué 5,6 cm au milieu pour le futur emplacement
moteur, et 13 cm de découpe pour l’arrière.
Il n’est pas utile de découper à ce stade la plaque
de Depron 3 mm du dessus, on risque de rater un ajustement au moment
du collage. On la laisse donc rectangulaire et on la coupera une fois
la boîte fermée et sèche.
NOTE : Les modélistes
économes pourront plus tard recoller les chutes de Depron
3 mm bord-à-bord pour bricoler les élevons.
Réaliser le contour
Une fois l’hexagone bien formé, on peut coller le contour
:
Bord d’attaque
Côtés
Arrière
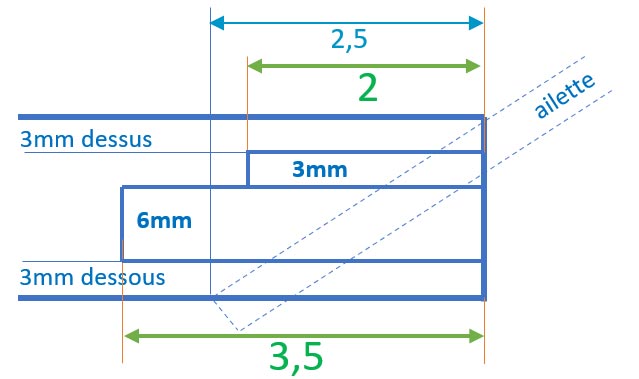
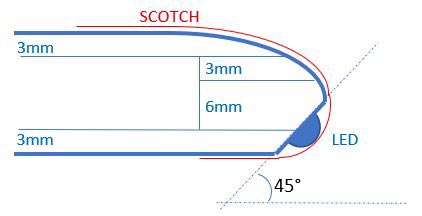
Pour faire le bord d’attaque,
découper deux bandes de Depron 6 mm de 40 cm de long sur
1,5 cm de large. Faire de même avec du Depron 3 mm puis coller
d’abord les bandes 6 mm puis dessus les bandes 3 mm comme
dans la vue en coupe finale ci-contre :
Bien noter que la bande de LED monochrome sera plus tard collée
A L’EXTERIEUR du bord d’attaque. Ces LED sont protégées
par un enrobage silicone qui les rend étanches et résistantes
aux chocs. On les recouvrira en plus de scotch transparent pour améliorer
la tenue du bord d’attaque.
NOTE : Ne pas commencer
à faire ces découpes ou arrondis tout de suite, seulement
quand on aura fermé la boîte.
Latéralement, pour faire les supports des Ailettes,
découper deux bandes de Depron 6 mm de 37 cm de long sur
3,5 cm de large. Découper également deux bandes de
Depron 3 mm de 37 cm de long sur 2 cm de large. Ensuite, de chaque
côté, coller d’abord les bandes 6 mm puis dessus
les bandes 3 mm comme dans la vue en coupe finale ci-contre :
Pour l’arrière, simplement découper
deux bandes de Depron 6 mm de 40 cm de long et 9 mm de large puis les
coller verticalement sur leur côté de 6 mm (comme pour la
matrice).
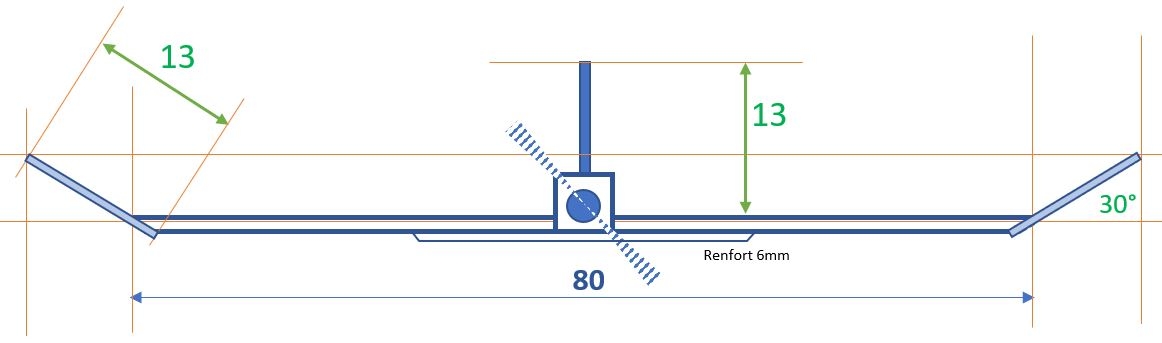
Ajouter les renforts
Pour que la partie de l’hexagone autour de la matrice se tienne
bien, on y installe quelques renforts en entretoises de Depron 6 mm
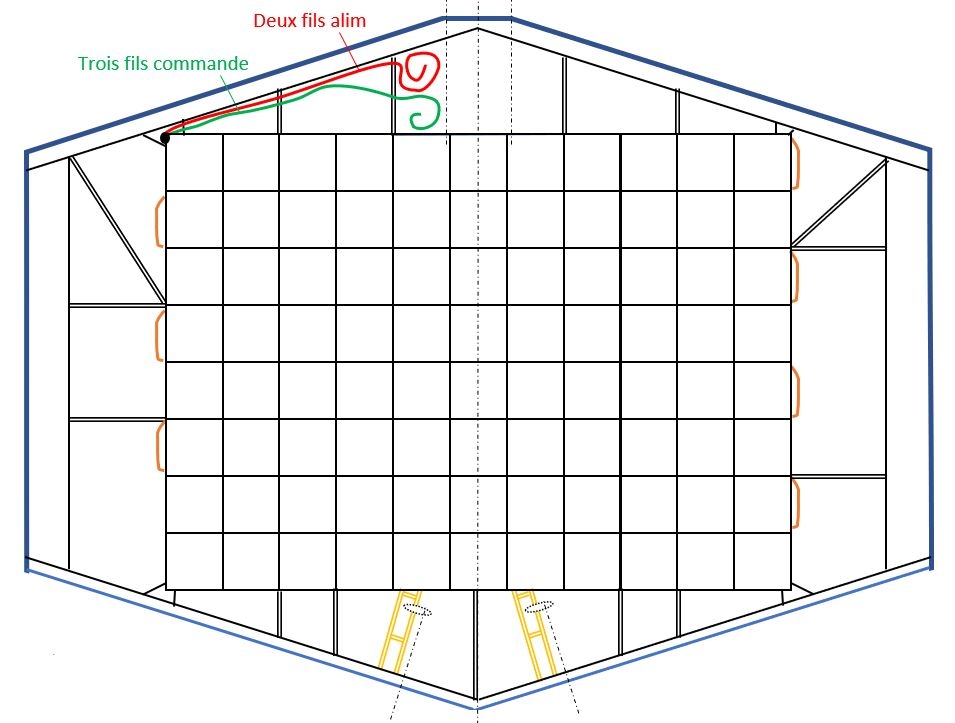
de largeur 9 mm. Voici à quoi doit ressembler votre construction
juste AVANT FERMETURE DE LA BOITE :
On notera les structures porte-servo, elles sont représentées
en orange car ELLES DEPENDENT DE VOS SERVOS. Découper et mettre
ces structures en place autour des servos qui seront dans l’appareil.
Vérifier attentivement les sens de rotation de vos servos pour
que les élevons fonctionnent bien avec la radio finale.
On notera aussi les fils d’alimentation (2 fils rouge et blanc)
et de commande (3 fils rouge, blanc et vert) de la matrice de LED qui
sont mis à la bonne longueur, remontés et enroulés
dans un compartiment que l’on ouvrira au cutter (lame neuve requise)
après la fermeture de la boîte (les tenir en place avec
un bout de scotch).
NOTE : Les fils des
servos et globalement de câblage du récepteur passent
tous à l’extérieur de la boîte. Il m’est
arrivé trop souvent d’avoir à changer le récepteur
ou des servos sur mes avions pour y ajouter inutilement ici une
petite session de chirurgie Depron…
Maintenant que votre forme est bien renforcée, la retourner
et recouvrir de scotch l’intégralité du dessous.
J’ai utilisé du scotch transparent large plutôt qu’une
grande feuille autocollante car je trouve plus facile de procéder
bande par bande, mais vous faites comme vous le sentez.
Avec mon scotch large, je fais une première bande verticale au
centre et je vais vers un côté en ayant un recouvrement
d’environ 3 mm entre les bandes. Ensuite je procède
de même pour l’autre côté. Pour éviter
les bulles, je plaque le scotch avec une carte de crédit (périmée
ou pas).
Fermer la boîte
Etape cruciale, si on oublie quelque chose à l’intérieur
ou si le collage est mal fait, oups !
> Avant de passer au collage, il peut être
utile de poser la structure sur une feuille de papier large et de tracer
la forme de l’arrière, elle servira ensuite de référence
au moment de fabriquer les élevons pendant le séchage
de la boîte.
Pour le collage du dessus en Depron 3 mm j’ai utilisé
la colle PU car elle laisse le temps d’encoller et de centrer.
De plus son gonflement assure une bonne répartition finale même
dans les zones peu encollées.
NOTE : Mon autre option
était une époxy lente mais elle est lourde et n’a
pas l’effet de gonflement. Il est possible aussi de faire
cette étape avec de la colle contact, c’est léger
et la phase d’encollage est très cool, par contre le
risque est énorme à la mise en place…
Commencer par encoller TOUTES les surfaces supérieures de la
structure existante (essentiellement du Depron 6 mm sur champ, ainsi
que le bord d’attaque et les côtés. Tout ce qui est
en bleu clair dans le dessin ci-dessous (oui il ne faut pas traîner)
:
Pour bien assurer que la colle est partout et uniforme, je dépose
d’abord un filet au tube presque partout. Puis je prends deux
touillettes en bois (une dans chaque main) que j’utilise comme
des spatules pour étaler/racler/nettoyer (technique apprise auprès
d’un plâtrier).
Quand vous êtes content de votre encollage (ou que l’alarme
sonne !), mettre en place la plaque de Depron 3 mm du dessus (encore
rectangulaire), puis retourner le tout, le poser par terre sur une surface
bien plate, y déposer délicatement une belle planche bien
plate et CHARGER COMME UNE MULE ! ! Personnellement j’ai mis 80
kg.
… Et si c’est de la PU ou de l’Epoxy lente, on oublie
pour une dizaine d’heures au moins.
Confectionner les élevons
Rien de bien sorcier, les deux élevons sont creux avec deux
nervures chacun.
L’avant est en Depron 6 mm, les nervures et les bouts sont en
Depron 3 mm ainsi que le recouvrement.
J’ai confectionné mes guignols en CtP 0,8 mm mais si vous
n’avez pas dépensé toute votre prime de vacances,
des guignols du commerce font l’affaire (attention au poids…
ils sont bien à l’arrière).
Pour l’articulation des élevons j’ai utilisé
des charnières classiques, pour écouler un stock qui jaunit
avec les années, mais vous pouvez utiliser du Scotch ou du Blenderm
(chacun selon une expérience durement acquise).
Et on met tout ça à l’abri parce que le Depron tout
léger et tout nu ça se griffe pire que de la peau de bébé.
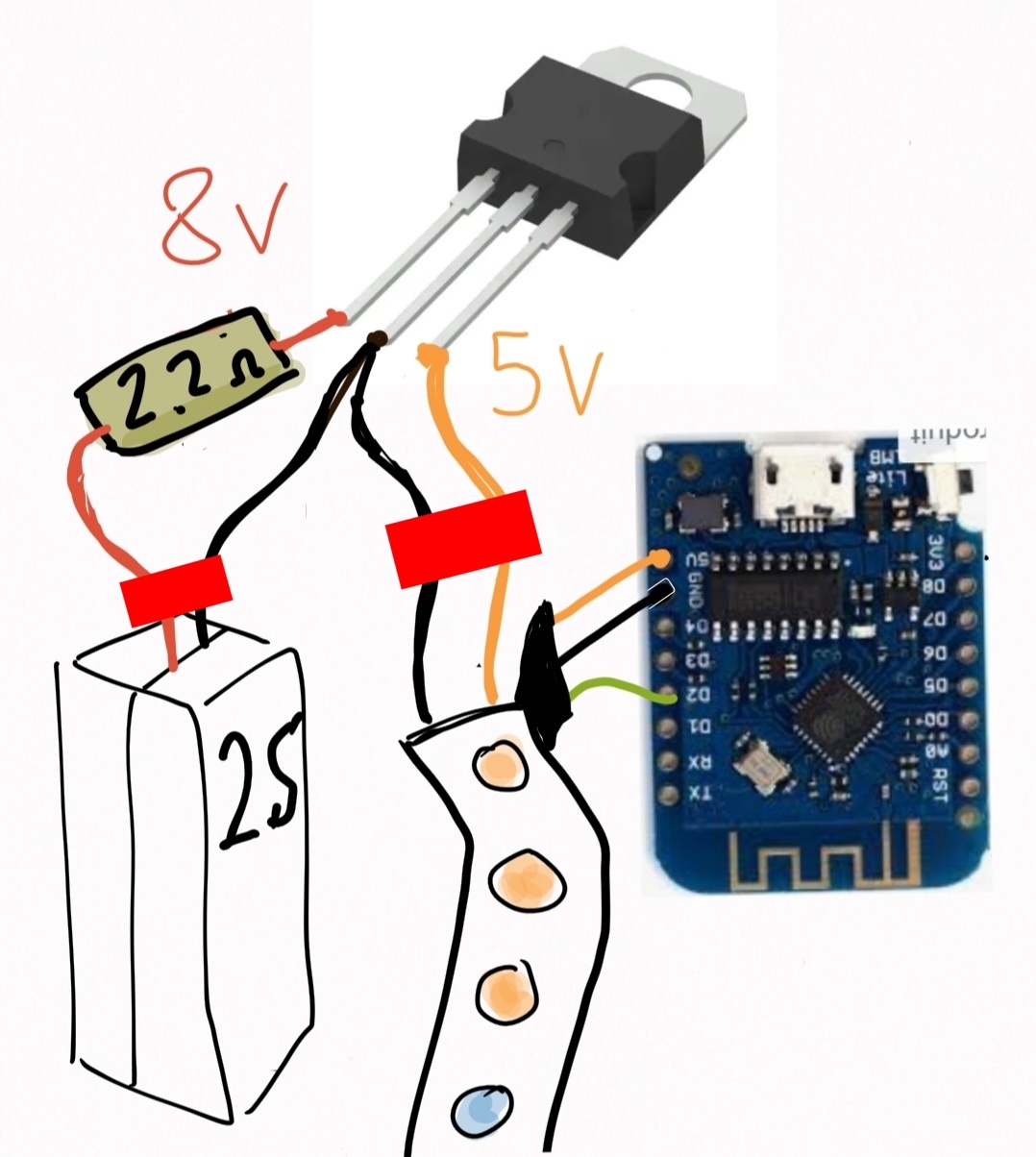
Confectionner les abaisseurs de
tension
Comme on n’a pas encore décoffré la boîte,
on a le temps de faire un peu de soudure pour réaliser les deux
circuits abaisseurs de tension. En effet nos accus sont 3S (~12V) et
2S (~8V) et nos LED ainsi que l’ESP8266 fonctionnent à
5V, nous allons utiliser deux instances du composant L7805CV qui nous
délivre un 5V en sortie depuis une large plage de tensions d’entrée.
NOTE : Je fabrique deux
5V plutôt qu’un pour des raisons de sécurité,
BigPix est destiné au vol de nuit et j’ai décidé
de séparer l’électricité destinée
au pur vol (moteur, Rx, LED linéaire) de l’électricité
destinée à la matrice (ESP8266, LED RGB). Ces deux
circuits travaillent en effet à des intensités bien
différentes (ampèremètre, ampèremètre…
est-ce-que j’ai une gueule d’ampèremètre !).
Ci-dessous la représentation des deux montages… comme
dirait Angelo, c’est assez trivial :
NOTE : Les pavés
rouges dans les dessins ci-dessus sont des prises avec détrompeur,
votre modèle préféré ira à condition
qu’elles laissent passer un bon ampère.
Et voilà à quoi ça ressemble en vrai :
On voit que le L7805CV de la matrice RGB a été monté
sur un radiateur improvisé qui sera placé (ainsi que la
résistance 2,2 Ohms) dans le vent de l’hélice. En
effet, ce circuit peut aller au-delà de 5 W et du coup les composants
chauffent bien (de ce fait c’est mieux de mettre de la pâte
thermique… si vous en avez).
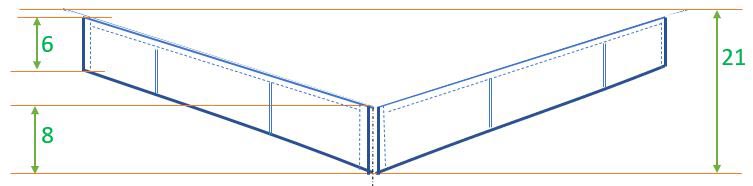
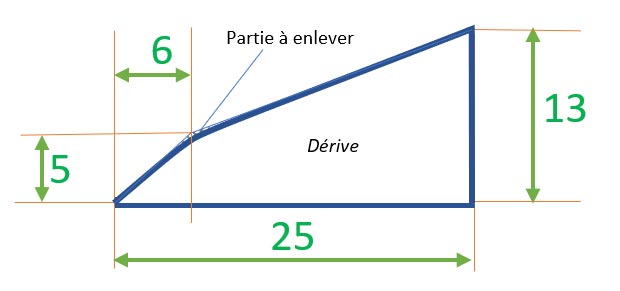
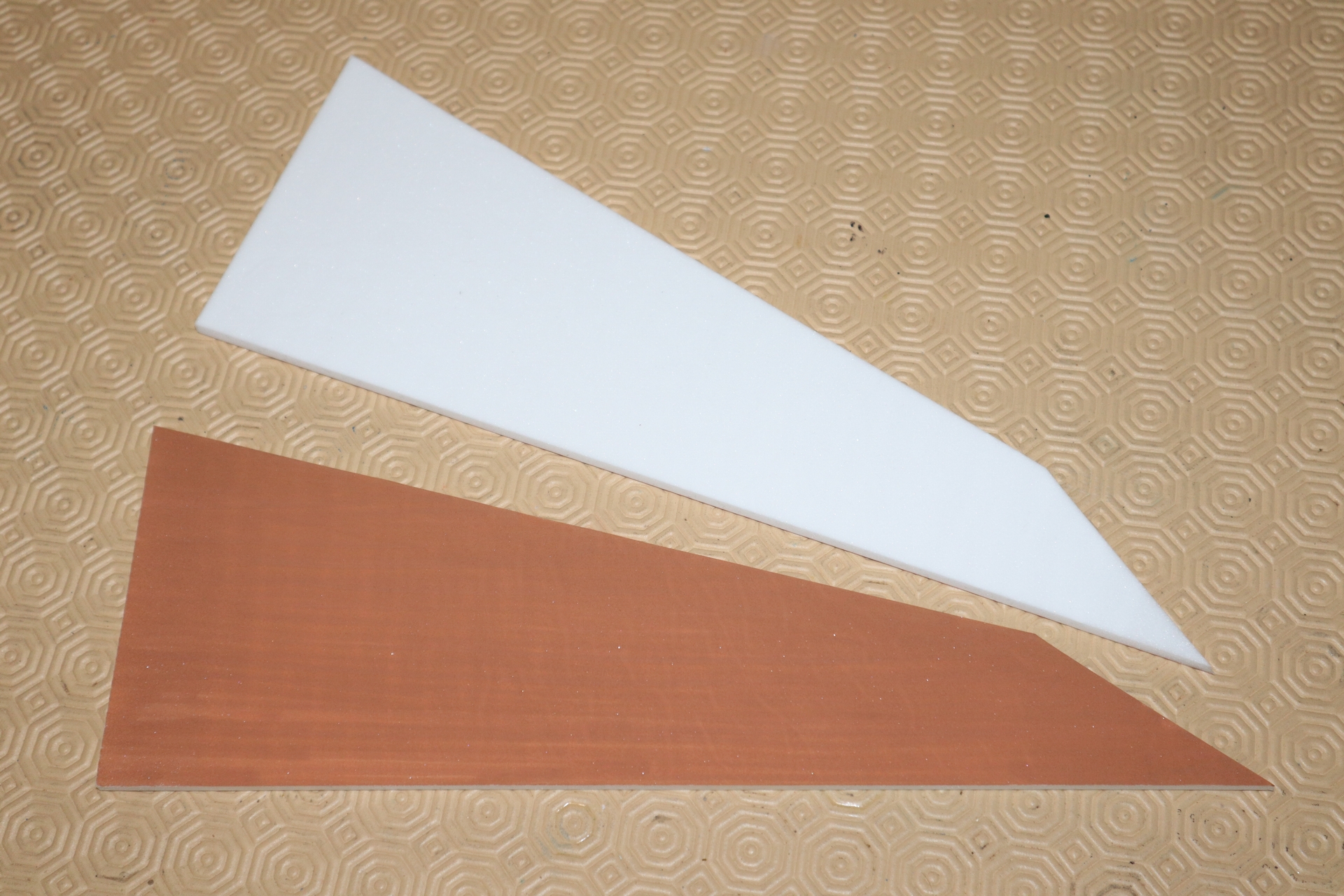
Découper ailettes et dérive
Les ailettes et la dérive ont des formes très semblables,
la dérive est simplement un peu plus courte et les ailettes sont,
si-possible, faites dans un matériau qui résiste mieux
aux chocs que le Depron (du cristal conviendrait… mais il est
trop lourd).
J’ai découpé mes ailettes dans de l’EPP 5
mm. Vous pouvez aussi prendre du Vector-Board de 4 mm ou 5 mm. Si vous
n’avez aucun de ces matériaux sous la main, du Depron 6
mm fera l’affaire.
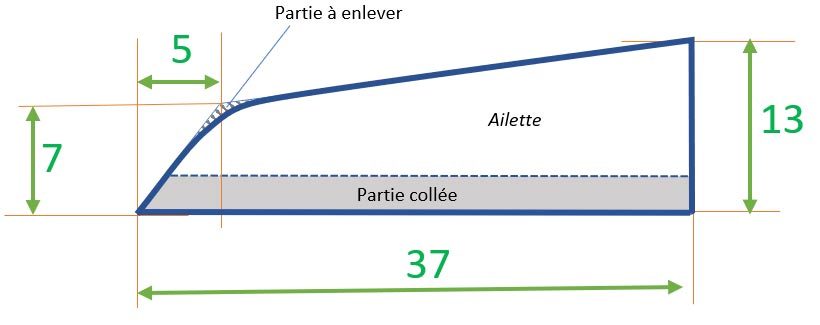
Les deux ailettes sont identiques, pas besoin de reporter
la forme depuis un plan on peut les dessiner à partir des
4 longueurs données ci-dessus :
Découper un rectangle de 13 x 37
A partir du coin inférieur gauche mesurer
5 cm en horizontal puis mesurer 7 cm à la verticale, marquer
le point.
Avec un réglet, tracer deux lignes partant
de ce point et allant aux coins inférieur gauche et supérieur
droit.
Couper selon ces deux lignes et arrondir l’angle
(au cutter ou ponçage).
La dérive est faire en Depron 6mm, procéder comme
pour les ailettes avec les dimensions suivantes :
Le montage final
L’heure de décoffrer la boîte a fini par arriver.
Vous enlevez les 80 Kg et la planche. Si ce que vous découvrez
ne convient pas, alors reprendre les opérations à l’étape
2 “Depron et colle” - sinon passer à l’étape
suivante.
Sur cette belle boîte bien solide il nous reste quelques opérations
de découpe et de collage (bord d’attaque, LED linéaire,
élevons, ailettes), ainsi que toute la confection du GMP (Groupe
Moto Propulseur). BigPix n’est pas destiné à faire
un planeur et ce GMP va de surcroît nous faire économiser
un paquet de plomb.
Tester la matrice finale
Découper délicatement au cutter une petite ouverture
dans le caisson qui contient les fils. Pour bien visualiser le caisson,
le mieux est de tenir la structure devant un éclairage et on
peut marquer l’emplacement de découpe car voit très
bien les délimitations par transparence.
Agrandir ce trou proprement à une forme rectangulaire pour pouvoir
y glisser l’ESP8266 mais pas plus.
Récupérer les fils, brancher la prise à 3 fils
sur l’ESP8266 (celle à 2 fils reste libre pour ce test)
et alimenter cette dernière… Le motif d’initialisation
doit s’allumer (tadah !…).
NOTE : On peut même
connecter un téléphone au réseau WiFi “BigPix”
puis tester les motifs en tapant 10.1.1.1 dans le navigateur ou
la barre de recherche (selon les modèles).
Bord d'attaque
L’objectif est d’intégrer les LED
linéaires au bord d’attaque tout en donnant à
ce dernier un bon profil et en le renforçant à la
fin avec du scotch.
Pour la mise en place des LED, poser la structure à l’envers,
face scotchée vers le haut sur une table de travail. Puis à
l’aide d’un réglet et d’une lame de cutter
neuve, enlever une bande à 45° sur toute la longueur du bord
d’attaque. L’idéal est de découper les 40
cm d’un seul trait ; si la lame s’arrête et repart,
le Depron fait une marque.
Ensuite couper deux longueurs de 40 cm de LED linéaire (elles
sont sécables tous les 5 cm), puis souder des fils aux deux extrémités
(attention au repérage GND, 5V). Mettre une longueur de fils
de 15 cm au moins côté pointe et 10 cm côté
ailettes pour le raccordement aux autres bandes de LED linéaires
et à l’abaisseur de tension.
Coller progressivement les deux longueurs de LED à droite et
à gauche en partant du centre.
Ensuite retourner la structure, face nue vers le haut, puis poncer le
haut du bord d’attaque de manière à former un profil
tel que montré ci-dessus. On peut accélérer le
processus en dégrossissant d’abord avec un cutter.
Lorsque tout le bord d’attaque est poncé, coller un scotch
large sur chaque demi-longueur de 40 cm.
NOTE : Pour éviter
les plis, je colle d’abord sur toute la demi-longueur supérieure
puis je tire le scotch au centre pour en coller une petite partie
jusqu’en bas en faisant le tour des LED. Ensuite je colle
le scotch vers le bas progressivement en tirant dessus perpendiculairement
au bord d’attaque.
Elevons, servos et récepteur
Commencer par rallonger les fils des servos car en général
ils ne font pas les 65 cm requis. Pour trouver la bonne longueur de
fils, installer d’abord le récepteur en découpant
son logement dans la partie droite à l’avant de la structure,
symétrique à l’emplacement de l’ESP8266 (laisser
l’emplacement hachuré bien dégagé pour la
boîte GMP).
La forme à plat sur une table de travail, présenter les
ailerons puis procéder en fonction de la méthode choisie
pour faire les charnières (perçage ou ci-dessous Blenderm).
Comme pour le logement de l’ESP8266, percer délicatement
au cutter les logements des servos en les ayant d’abord repérés
à la lumière traversante.
Mettre les servos et les tiges en place de manière à bien
repérer l’emplacement souhaité pour les guignols
(je les mets perpendiculaires à l’articulation mais ça
n’est pas obligatoire). Ce qui est obligatoire, c’est que
l’axe du guignol soit bien dans un axe perpendiculaire à
l’articulation (comme ci-dessous), sinon le mouvement de la gouverne
sera plus important d’un côté que de l’autre.
Fixer les guignols et les relier aux servos, régler les tiges
au neutre puis allumer la radio après avoir relié les
servos au récepteur.
Avec la radio, régler les débattements maximum (au niveau
de la dérive) :
15 mm vers le haut
15 mm vers le bas
Confectionner la boîte GMP
Le moteur ainsi que le contrôleur et les deux Li-Po sont enfermés
dans une petite boîte qui constitue le nez de BigPix. Cette boîte
est fabriquée à part puis on la colle à la fin
à la structure après y avoir découpé son
emplacement.
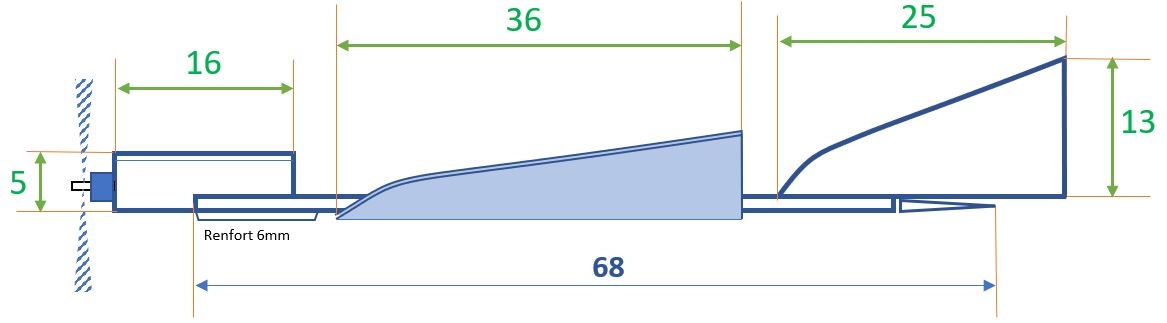
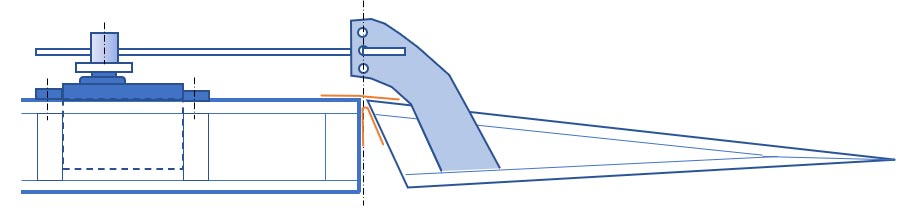
La construction de la boîte doit assurer le centrage final de
BigPix. On voit ci-dessous le CG à 25% de la pointe avant :
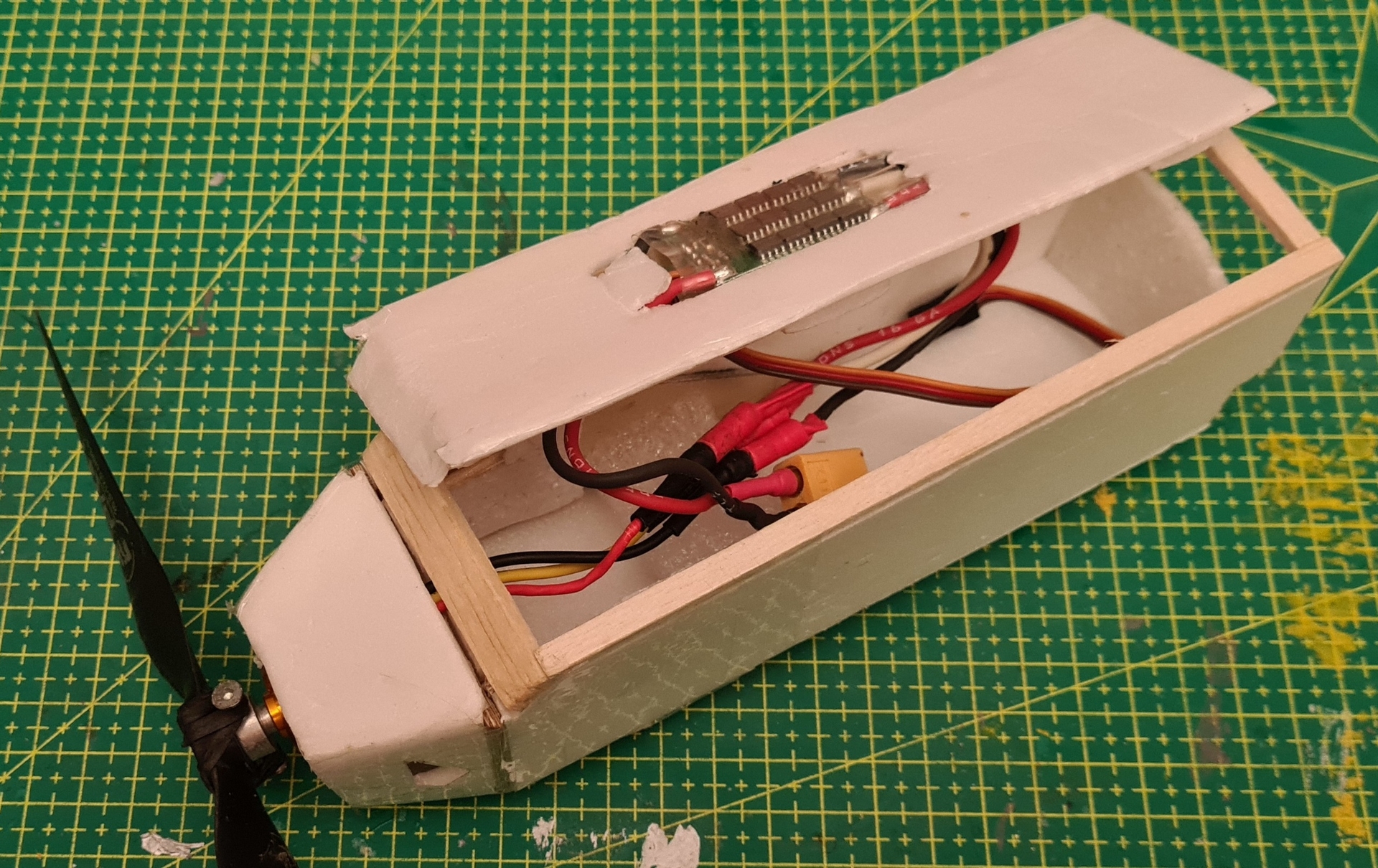
On voit ici cette boîte en cours de montage
(oui j’ai fait ça avant de fermer… c’est
pas bien).
Il est TRES important d’effectuer la mise en place de TOUS
les éléments (moteur, contrôleur, Li-Po, Rx,
servos, ESP8266… et aussi les ailettes et la dérive)
AVANT collage pour s’assurer que le centre de gravité
de l’appareil ne nécessitera PAS de plomb (faire tenir
les éléments en place avec du scotch, des élastiques,
des aiguilles…).
La première étape consiste à découper
les trois pièces en CtP puis à couper des longueurs de
4 cm dans une brochette de diamètre 3 (idéalement en bambou).
Placer le moteur sur la cloison pare-feu. Faire en sorte que le moteur
soit aligné avec le bas de la cloison de manière à
descendre l’axe de traction de la structure. Marquer les 4 trous
à percer, puis les percer ensuite dans la cloison pare-feu avec
un foret de 2.
Percer également 4 trous dans la cloison pare-feu à
7 mm des bords verticaux. On y enfilera et collera des longueurs de
4 cm de tige à brochettes qui serviront de liaison mécanique
avec les flancs de renfort en CtP.
Ensuite découper les flancs de la boîte GMP en Depron 6
mm puis ajuster tout cela avec la structure en CtP tout juste réalisée
de manière à ce que les flancs s’alignent avec les
deux entretoises centrales de l’avant de la matrice de LED RGB
(comme ci-dessus).
NOTE : La longueur des
flancs en Depron 6 mm n’est pas indiquée sur le schéma…
car elle dépend de votre GMP. Mettez tout en place et trouvez
la longueur pour que le CG soit au bon endroit. Dans mon cas, cette
longueur est de 16 cm.
Sur un plan de travail, coller la cloison pare-feu avec les flancs
CtP après les avoir bien mis en place, puis coller ensuite les
flancs en Depron de chaque côté de la structure en CtP.
Coller aussi les longueurs de brochette pour bien renforcer l’avant
de la boîte.
Couper à 45° le coin supérieur avant des flancs en
Depron pour ajouter un peu de profilage aérodynamique à
la boîte GMP, puis y coller une entretoise en balsa ou spruce
(ou plusieurs longueurs de touillette côte-à-côte).
Coller également des touillettes en bois sur les bords supérieurs
de la boîte GMP pour éviter qu’ils ne s’abiment
à l’usage.
Découper deux bandes de Depron 3 mm pour faire le couvercle et
le plancher de la boîte GMP. Le plancher doit être à
l’intérieur, il est 12 mm moins large que le couvercle.
Le coller en place. Pour fermer le couvercle, on peut le tailler et
le courber à l’avant afin qu’il se glisse sous le
profilage, puis on met un bloqueur à l’arrière (ou
idéalement un aimant). Coller également une entretoise
en travers à l’arrière pour la tenue mécanique
de la boîte.
Façonner le nez de BigPix
Découper l’avant de la structure pour y loger la boîte
tout juste terminée.
Poser l’aile bien à plat sur le plan de travail, la boîte
GMP doit se loger sans jeu dans la découpe de l’aile -
le plus simple est d’utiliser la boîte elle-même comme
gabarit de découpe.
Mettre un film plastique sur la table pour ne pas coller tour ça
ensemble définitivement puis coller la boîte à l’aile
(Cyano, Araldite ou PU selon ce qui reste dans les tubes…).
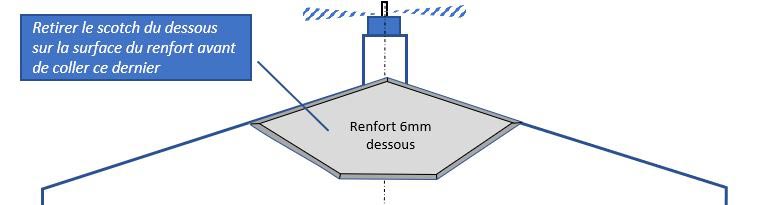
Ensuite, découper en Depron 6 mm le renfort inférieur
que l’on collera sous la structure. Tailler les bords de ce renfort
à 45° avec une lame de cutter neuve AVANT collage.
Quand le collage de la boîte est sec, retourner le tout. Avec
une lame de cutter neuve, détourer délicatement et retirer
le scotch de la surface du dessous de l’aile destinée à
recevoir le renfort, sinon le collage ne prendra pas. Puis encoller
le renfort et le fixer en place.
Après séchage, remettre du scotch sur ce renfort destiné
à prendre tous les atterrissages dans les dents. J'en ai profité
pour mettre aussi du scotch sur le nez et sur le couvercle de la boîte
GMP.
Coller la dérive et les
ailettes
La dérive et les ailettes sont déjà découpées
car elles ont servi au centrage, il suffit maintenant de les coller.
Pour la dérive, on colle à la cyano en faisant bien attention
à l’alignement dans l’axe de vol et à la mise
en croix (dérive à 90° de la surface de l’aile)
Pour les ailettes, j’ai utilisé de la PU donc il a fallu
faire un montage avec élastiques et baguettes pour les tenir
en place :
LED de contour pour le vol de nuit
BigPix peut voler dans cet état mais de jour uniquement. Pour
le vol de nuit il faut terminer le contour des ailettes avec des LED
linéaires de manière à bien visualiser l’assiette
et la direction de l’appareil dans le noir.
Dans ce qui reste de LED linéaire, découper deux bandes
de longueur 35 cm pour les coller en bas sur la face du dessous des
ailettes, puis quatre bandes de 10 cm pour en coller deux le long du
bord de fuite de chaque ailette, une au-dessous et une au-dessus.
Relier ces différentes bandes entre elles pour la partie droite
et pareil pour la partie gauche, en soudant des fils 5 V et GND afin
qu’elles soient toutes alimentées.
Le vol de BigPix
La nuit sur le terrain, une lampe est
bien pratique pour effectuer les branchements sans se tromper.
Pour le décollage, le BigPix est
posé à plat sur la main. Avec une très faible
charge alaire, il s'envole sans difficulté après une
petit impulsion.
J’ai mis dans BigPix tout ce que je connaisais des avions maniables,
faciles et lents. Le pilote doit en effet assurer le spectacle, et de
nuit !
On retrouve donc les ailettes de l’excellent Polyclub, un poids
plume qui nous met à 14,4 g/dm², des gouvernes qui ont été
agrandies par rapport à celles de l’Hexafly car BigPix
est tout plat, il n’a pas le profil KF de ce dernier.
Au final, ça vole comme une fleur, le seul point délicat
est le décollage, la surface inférieure étant plate
et lisse, rien pour agripper. Je pose BigPix à plat sur la main,
légèrement en avant du CG, puis je mets 2/3 gaz en gardant
le pouce de l’autre main sur la profondeur, ça part gentiment
droit devant à une condition : avoir respecté les angles
d’anti-couple et de piqueur moteur… sinon c’est le
crash quasi assuré (mais BigPix est solide !).
Thierry et son surprenant BigPix
en vol de nuit. Nul doute qu'il va faire des adeptes chez les
pilotes noctambules.
Lorsque j'ai découvert une petite vidéo
du BigPix de Thierry Joubert, j'ai été aussitôt
séduit. Une machine volante pour le vol de nuit, avec des
motifs animés qui en plus peuvent être modifiés
à distance pendant que la machine évolue, avec un
simple téléphone : le top !
Quelques jours plus tard, je l'ai vu voler à Inter-Ex et
Thierry a gentiment proposé de rédiger un article
pour les Jivaros. Et quel article ! Tout y est soigneusement détaillé
pas à pas, du câblage à la fabrication du
modèle en passant par la programmation.
Il s'avère que le BigPix est relativement économique
avec sa cellule en Depron qui reçoit une carte électronique
ne coûtant que quelques euros. Hormis la radiocommande,
ce qui revient le plus cher, ce sont les quelques mètres
de LED.
Cet écran
comporte une matrice bardée de LED RGB pilotées
depuis un smartphone, ce qui permet de faire défiler
n'importe quel texte ou d'afficher des motifs.
Dès que j'ai pu, j'ai attaqué le mien en
suivant les étapes et en adaptant quelques points selon
mes envies.
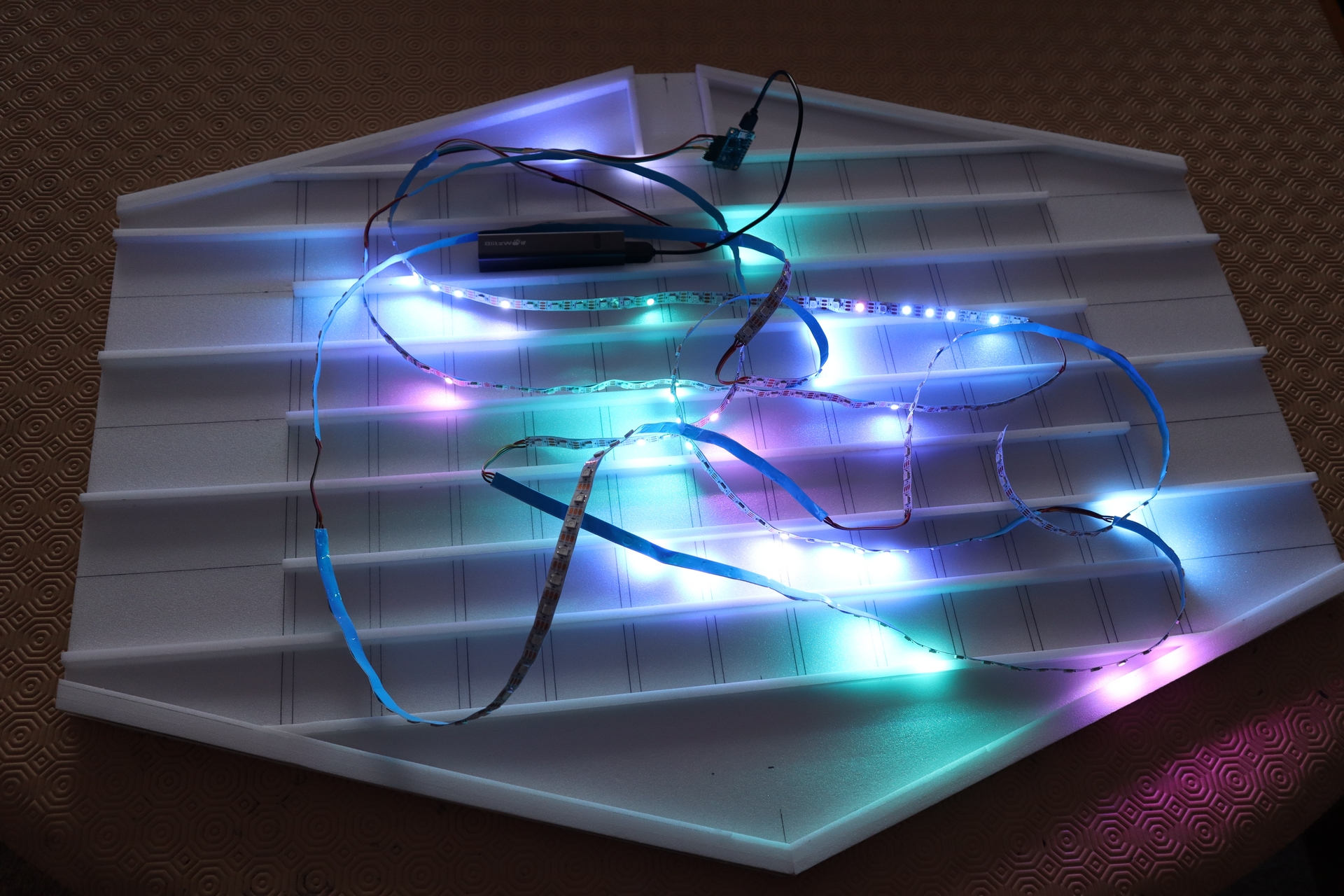
Fabrication de la matrice : les
bandes horizontales sont prolongées alternativement
jusqu'aux saumons pour rigidifier, tout en laissant passer
le câblage des bandes de LED. Avant collage, on s'assure
que tout fonctionne.
Collage des
bandes de LED. En plein jour, les LED se voient peu.
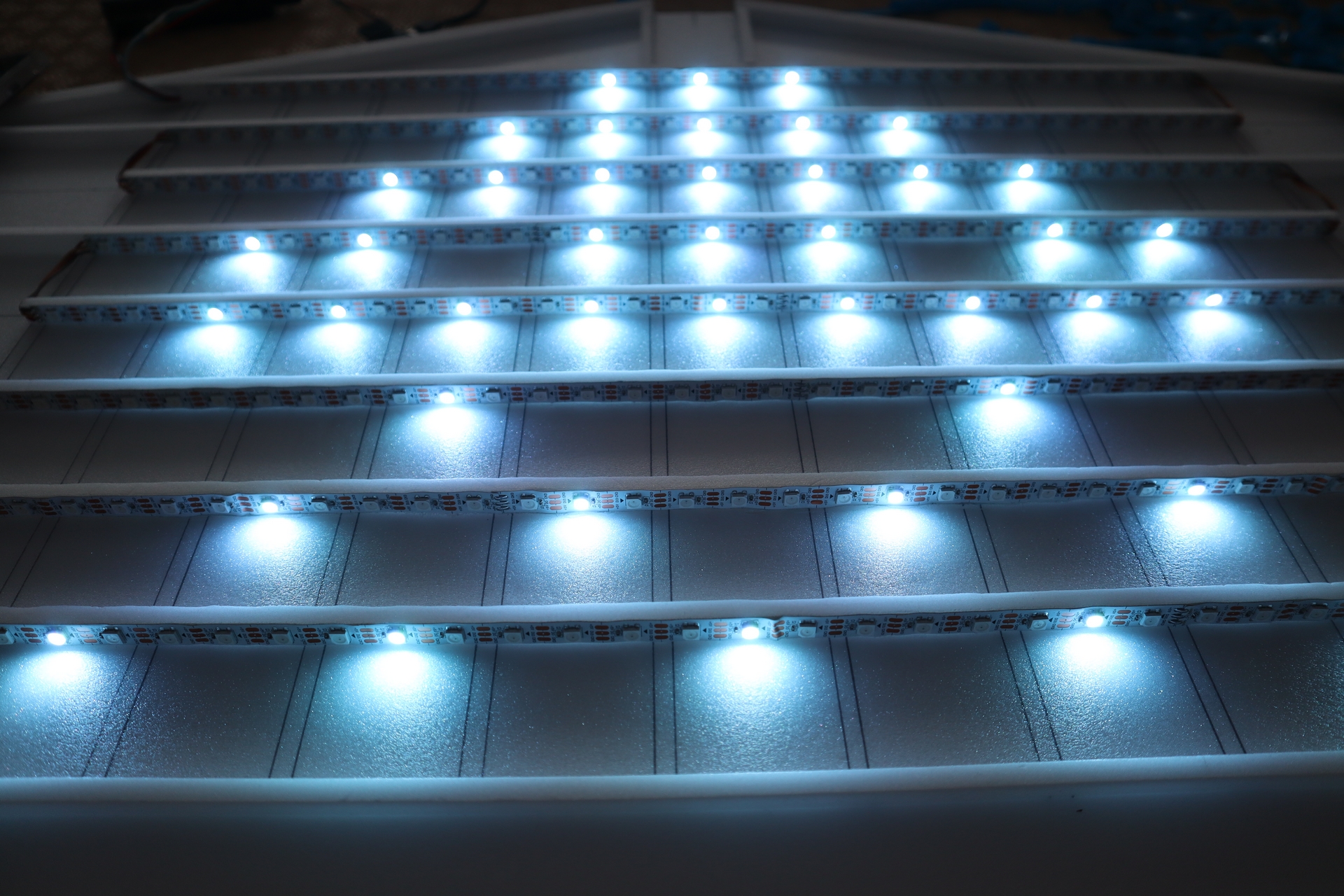
Dans le noir par
contre, ça crache ! Et en plaçant le coffrage
supérieur en Dépron, on constate que la diffusion
se fait parfaitement.
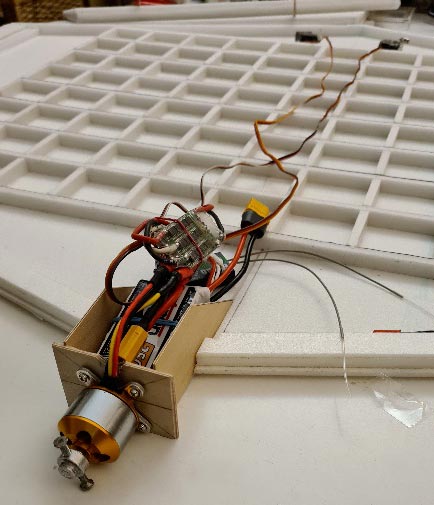
Ca en fait, des mètres de
LED. Elles sont pilotées par la carte Arduino. J'ai
choisi de placer celle-ci dans le fuselage et non pas dans
l'épaisseur de l'aile afin de pouvoir la re-flasher
si nécessaire.
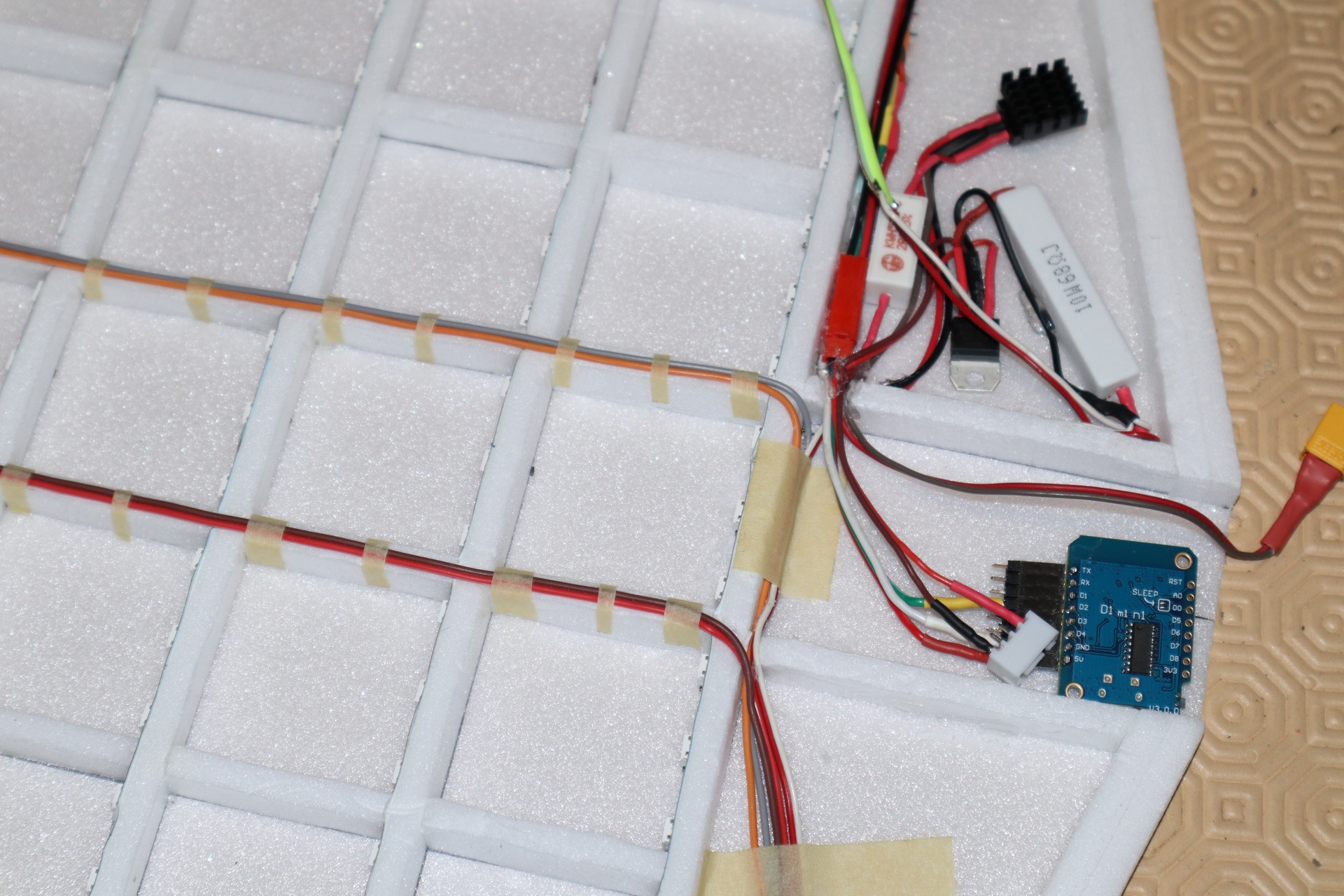
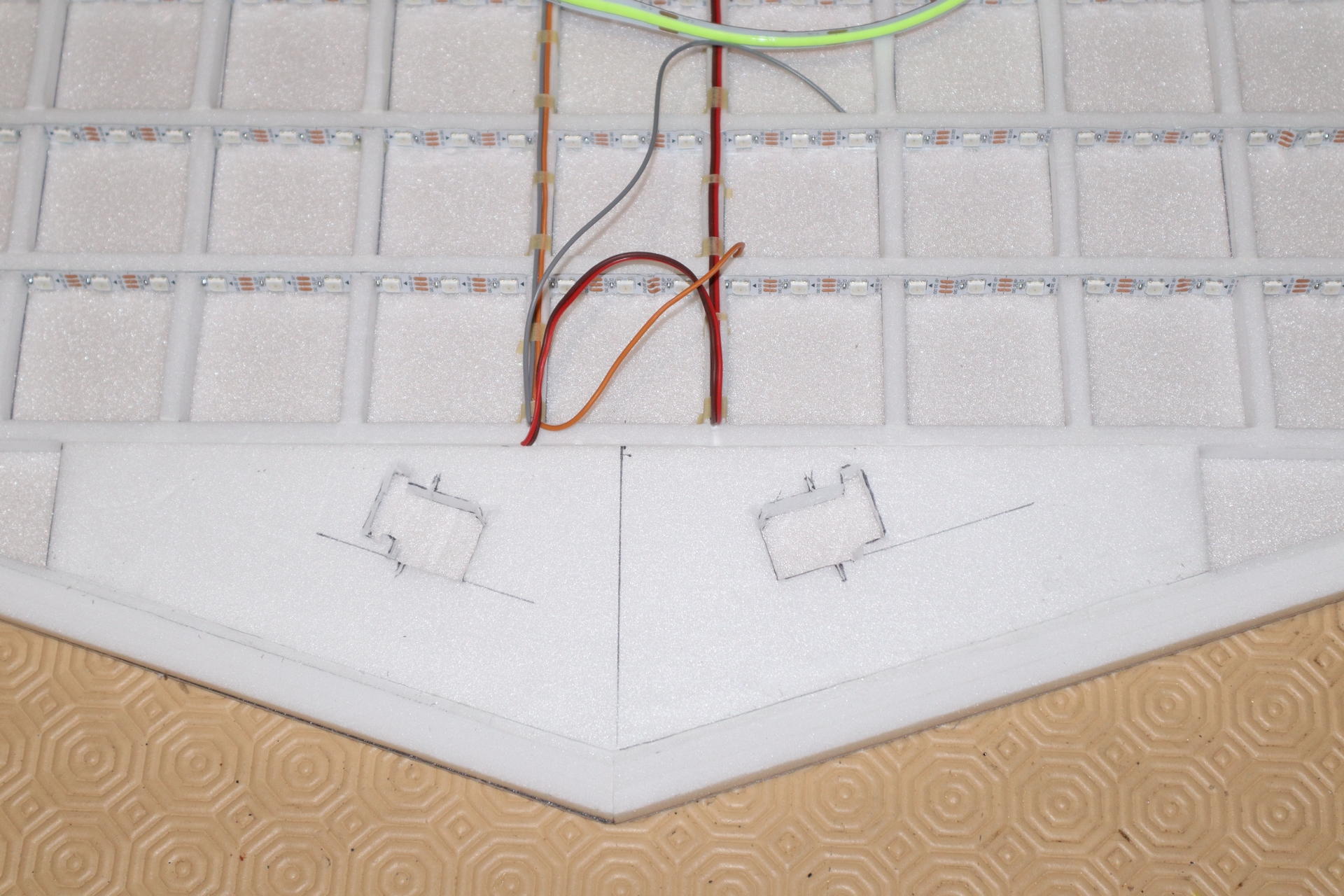
Sur le proto de Thierry, les fils
servos passent au-dessus du coffrage. De nuit, ça ne
se voit pratiquement pas. Comme j'avais une idée de
déco, j'ai préféré les intégrer
au-dessus de la matrice, sous le coffrage. J'ai tiré
4 fils regroupés 2 par 2. Le "+", le "-"
et deux autres pour les signaux de servos. Côtés
servos, les fils d'alimentations se terminent en Y afin d'alimenter
chaque servo.
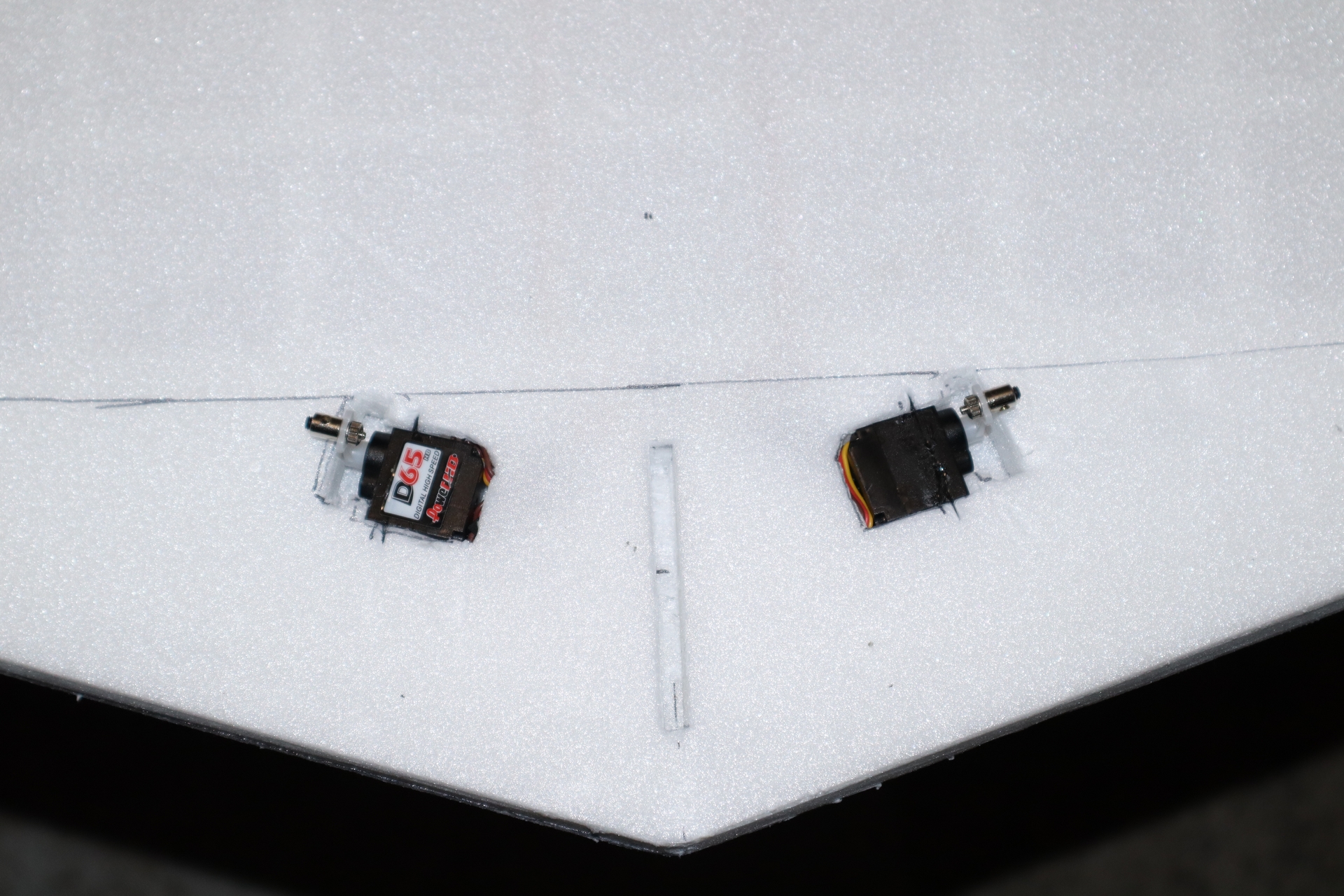
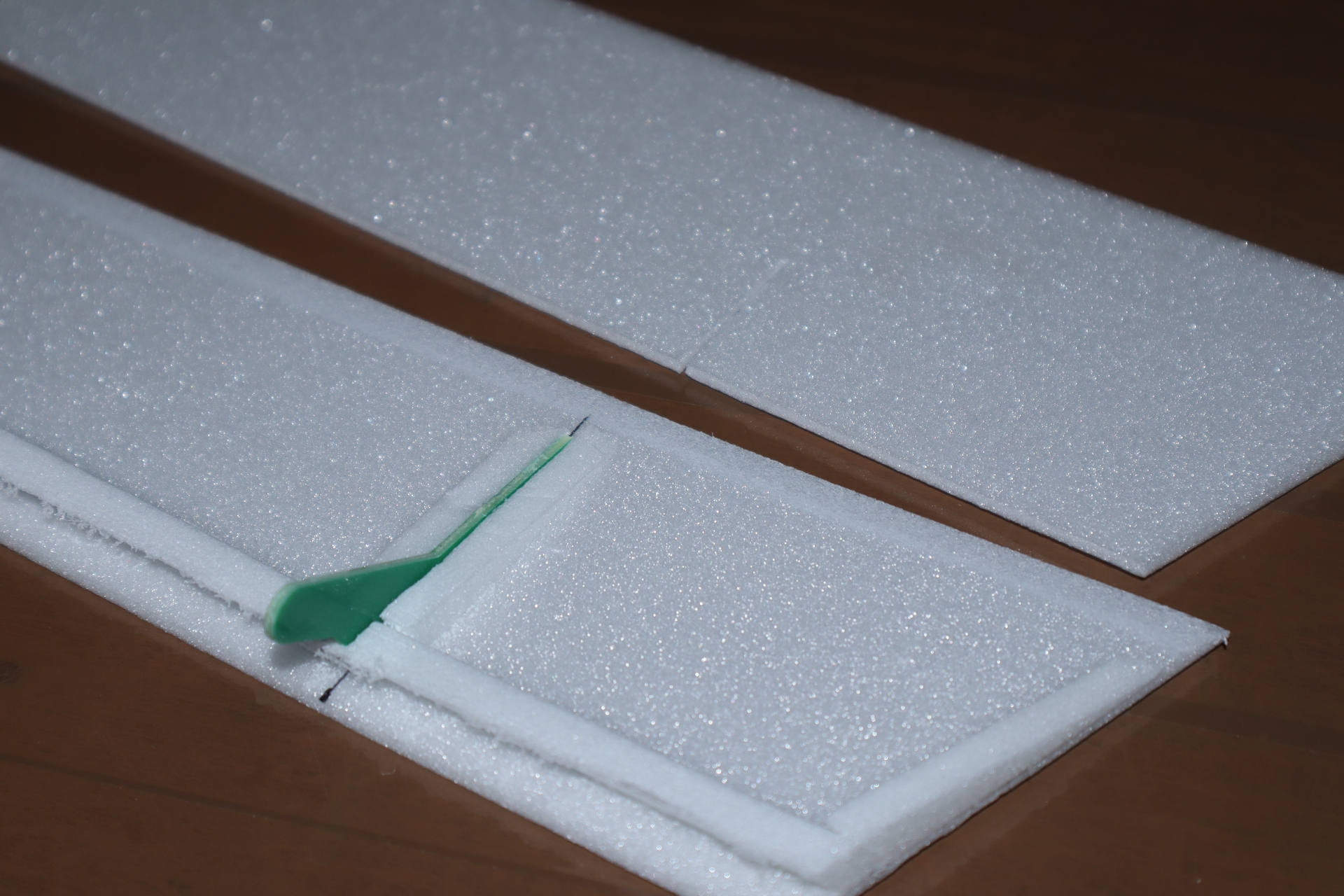
Ces derniers sont glissés
à plat avec seulement les palonniers qui dépassent.
Une feuille de polystyrène Choc de 0,5 mm recouvre
le fond du compartiment servos en passant sous la dérive,
qui est démontable et tient simplement par emboîtement.
Cette dérive ainsi que les ailettes sont en Super Board
de 5 mm. C'est pratiquement incassable.
Les ailettes ont été
rendues démontables. Pour cela, des pièces ont
été dessinées en 3D et imprimées
en PLA. Elles bloquent les écrous de 4 mm en nylon
et se collent sur une bonne surface dans les saumons, sans
que rien ne dépasse. Les quelques grammes ajoutés
n'ont aucune incidence sur la charge alaire étant donné
la surface de l'aile.
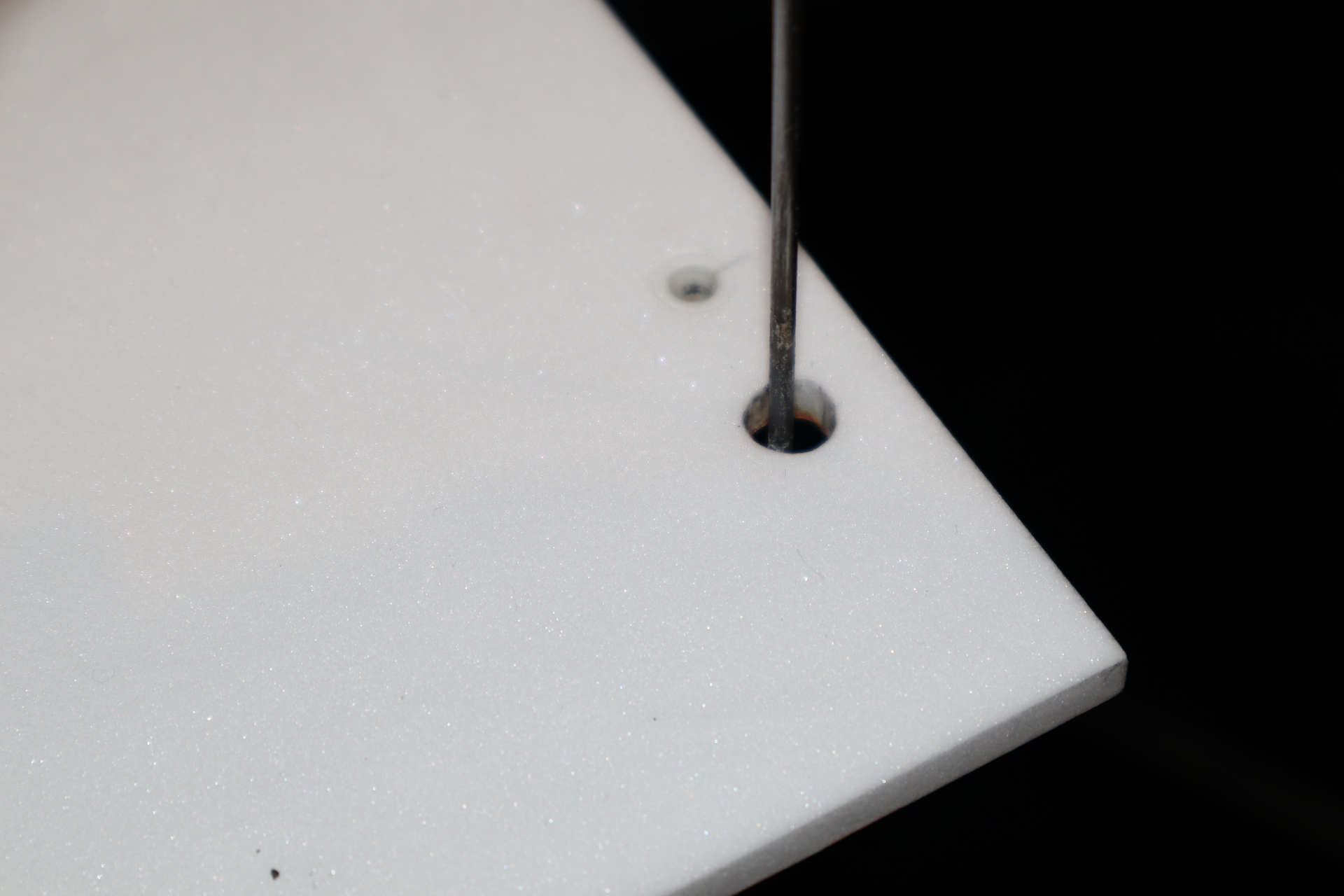
Des boutonnières sont percées
dans les ailettes. Un gros trou pour le passage de la tête
de la vis nylon, une saignée plus étroite que
la partie filetée, et un trou de blocage à l'extrémité.
Ces perçages sont effectués avec une corde à
piano chauffée à la flamme. Prévoir une
bonne ventilation lors de cette étape.
Plutôt que du ruban adhésif
transparent, c'est du film de plastification à chaud
(lamination) de 42.5 micron qui a été utilisé.
Il se pose parfaitement sur le Depron, en chauffant modérément
pour ne pas fondre la mousse mais suffisamment pour activer
la colle thermofusible et le tendre légèrement.
Les guignols ont été
fraisés dans de la plaque époxy de 2 mm, bien
longs pour répartir les efforts.
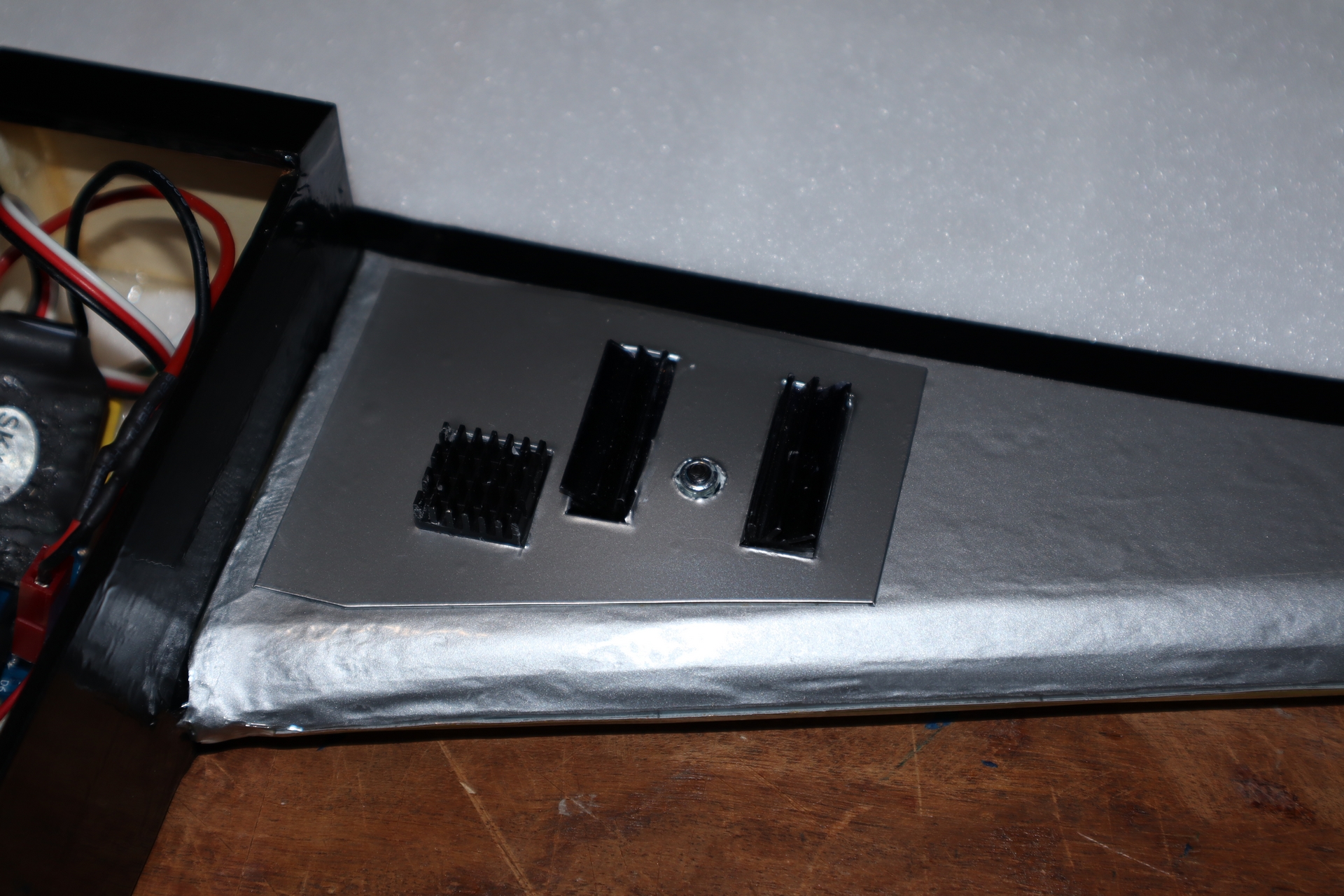
Les régulateurs de tension linéaires 5.0V chauffent
beaucoup et il est nécessaire de prévoir un
refroidissement. J'ai utilisé de la pâte thermique
et une vis pour fixer des radiateurs en alu récupérés
sur de vieilles cartes électroniques.
Une trappe en feuille de plastique
est ajourée pour laisser dépasser ces radiateurs.
Elle est collée au double-face.
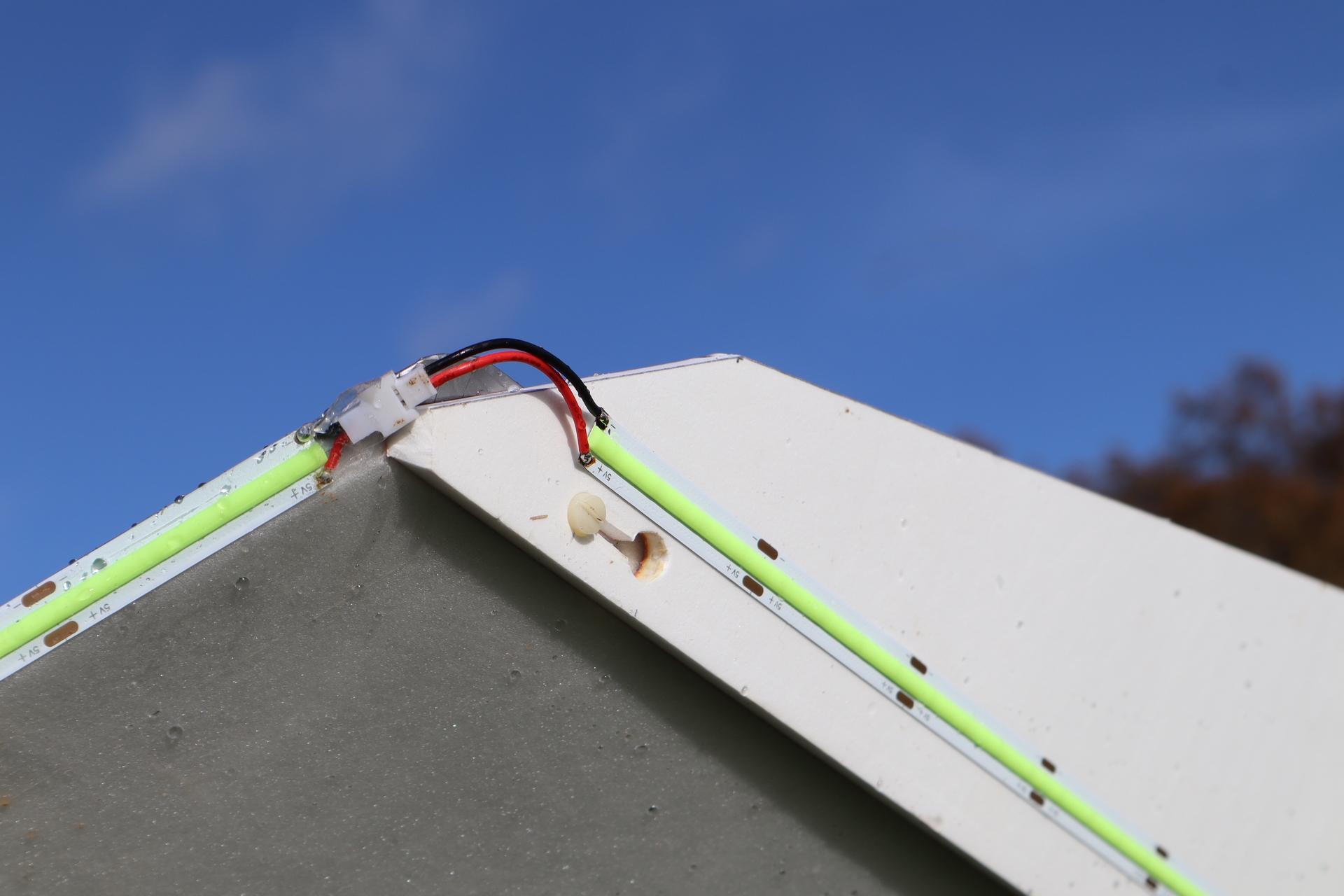
Bien pratiques,
les ailettes et la dérive démontables.
Le raccord des
LED Cob qui courent au bord d'attaque et le long des ailettes
est effectué avec un petit connecteur pour rester
démontable.
Le décor est inspiré
des téléviseurs d'antan. Je trouve qu'un modèle
destiné au vol de nuit peut quand même être
décoré afin d'être plus attrayant quand
on le voit de jour. La partie écran est recouverte
de film de plastification. Le gris et les éléments
rapportés sont en vinyle autocollant. Les ailettes
ont quant à elles reçues deux couches de feutre
Posca marron et un gabarit perforé à servi pour
simuler les trous après une voile de peinture noire
en bombe.
Détail des radiateurs qui
débouchent à l'extrados, et de la fausse plaque
portant le nom de baptême du modèle.
Les visuels intégrés
dans le programme de Thierry sont déjà variés
et assez nombreux, surtout qu'ils s'affichent dans différentes
couleurs. Il est cependant possible d'en créer soi-même.
Reste à trouver les idées...
On peut aussi faire défiler du texte très facilement.
En vol, ça se remue très
bien. Et même de nuit grâce aux LED Cob qui font
pratiquement le tour, à l'intrados.
Premier vol de jour, c'est
préférable. Si tout fonctionne correctement,
celui de nuit peut être envisagé.
Les bordures vertes
sont visibles sous pratiquement tous les angles ce qui permet
de bien identifier la position du modèle.
Pause longue sur l'appareil
photo avec le pilote qui tient le modèle puis l'objectif
est masqué avec la main durant le lancé, pour
être à nouveau dégagé et fixer
les traînées de lumières.
En vol, ça
se remue très bien. Et même de nuit grâce
aux LED Cob qui font pratiquement le tour, à l'intrados.
Premier vol de jour, c'est
préférable. Tout fonctionne correctement
donc le prochain aura lieu de nuit.