 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||
 |
Présentation : Serge Romani
Dans les années 50 en lisant des revues que mon père achetait (Mécanique populaire ou Science et vie) je rêvais devant les essais d’engins plus ou moins farfelus que concevaient les Américains. Je ne sais pas pourquoi mais cette plateforme faite par Hiller m’avait tapé dans l’œil. A l’époque, j’étais loin de penser faire du modèle réduit, et la radio ce n’était même pas en rêve : on était encore au « tout ou rien » et ça coutait la peau des fesses…
 |
|
Plus tard, dans les années 70, après des essais infructueux et quelques déboires, j’avais abandonné un premier proto : je n’avais pas de gyro et c’était impilotable. Du coup, j’avais mis l’idée au placard.
Beaucoup plus tard, quand sont apparus les multirotors et leur carte de vols l’idée a refait surface. N’étant pas un pro de la programmation pour Arduino ou autres, j’ai pris une KK2. L’avantage : il existe un programme préétabli « single copter 2M 2S » c’est juste ce qu’il me fallait. La réalisation a pu être entreprise. |
 |
CONSTRUCTION |
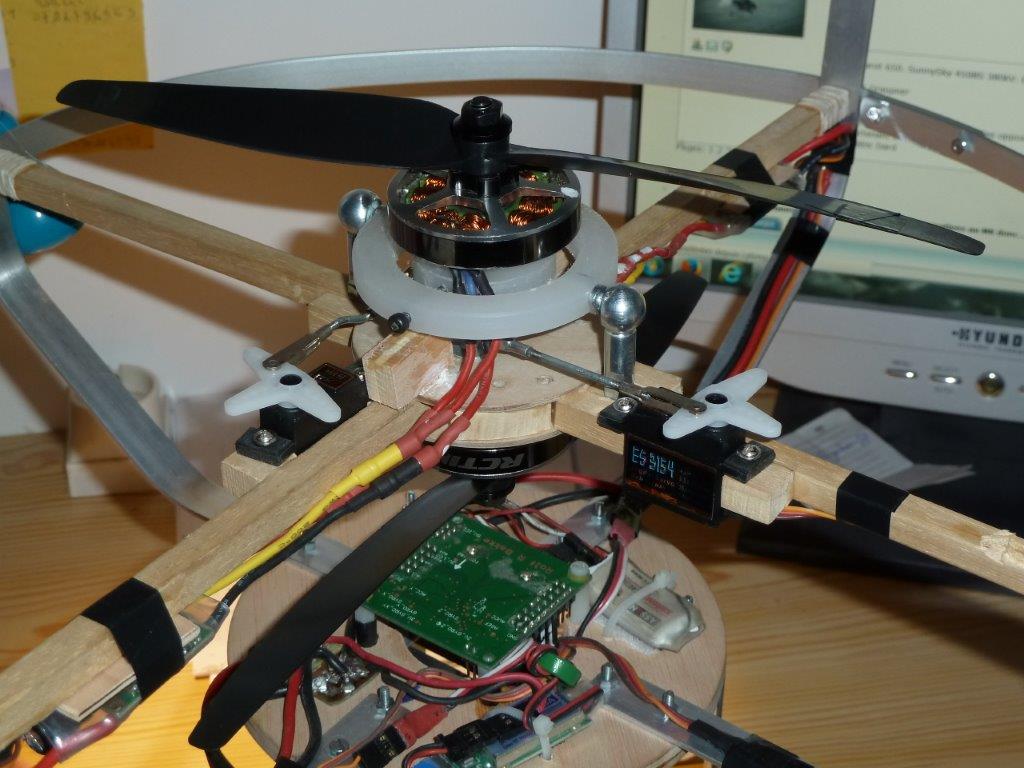
J’ai commencé par un petit modèle
avec deux moteurs, deux contrôleurs et deux servos 9 g achetés
loin là-bas... Sur les photos, on voit des Axi mais ils chauffaient
trop.
Pour la structure au début, c’était du plat d’alu
de bricaillerie, des gouvernes en Dépron de 3 mm, des boules et
des ronds en polystyrène achetés chez Cultura (pub gratuite).
Je vous épargne les détails de la construction pas à
pas.
 |
 |
|
Quelques photos du
proto en forme de donut. Les gouvernes sont en Dépron, commandées
par 2 servos. La batterie est placée au-dessus des moteurs. |
||
 |
 |
|
| Les moteurs tournent en sens opposé pour éliminer les effets de couple. | ||
Pour les réglages de la carte, la notice
est très explicite pour les Quadri mais pour les Single, il faut
y aller à tâtons. J’ai voulu faire quelques essais
dans la salle à manger à cause de la météo
mais j’ai vite abandonné, je frisais l’incident diplomatique…
J’ai profité d’une journée indoor pour les premiers
essais. L’avantage, c’est qu’on peut le tenir à
la main pour régler les trims, et comme ça avait l’air
d’aller, je l’ai lâché. A ma grande surprise
ça volait et c’était même assez stable, bien
que le centre de gravité soit au-dessus des hélices.
Premiers essais concluants du Coaxcopter. |
Après ce succès, l’idée de la plateforme à repris son cours.
MATERIEL |
Pour le matériel, c’est principalement acheté en bricaillerie :
|
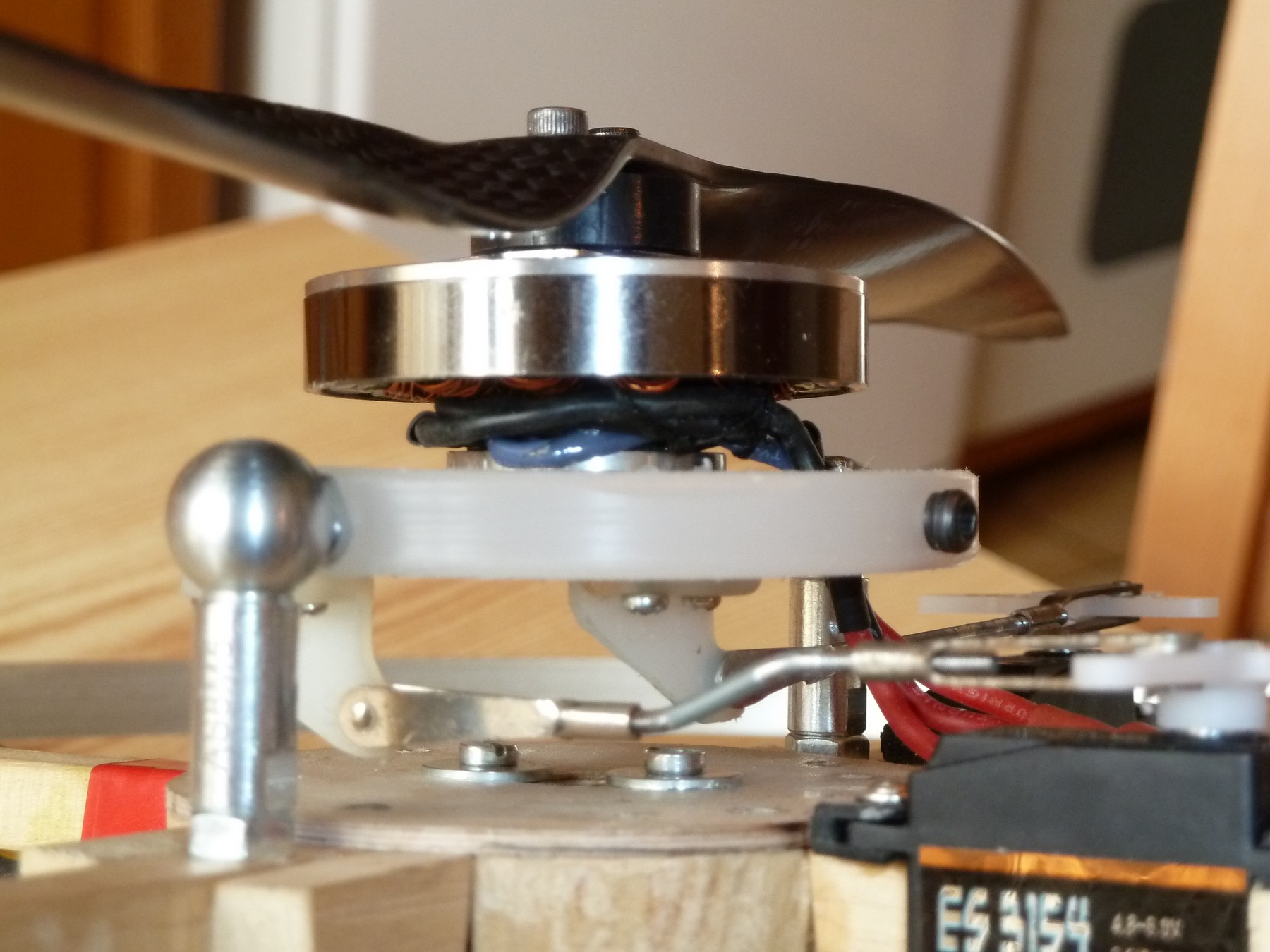
Les moteurs sont des RCtimer 5010 kV 620 et
hélices carbone 12''x5,5''.
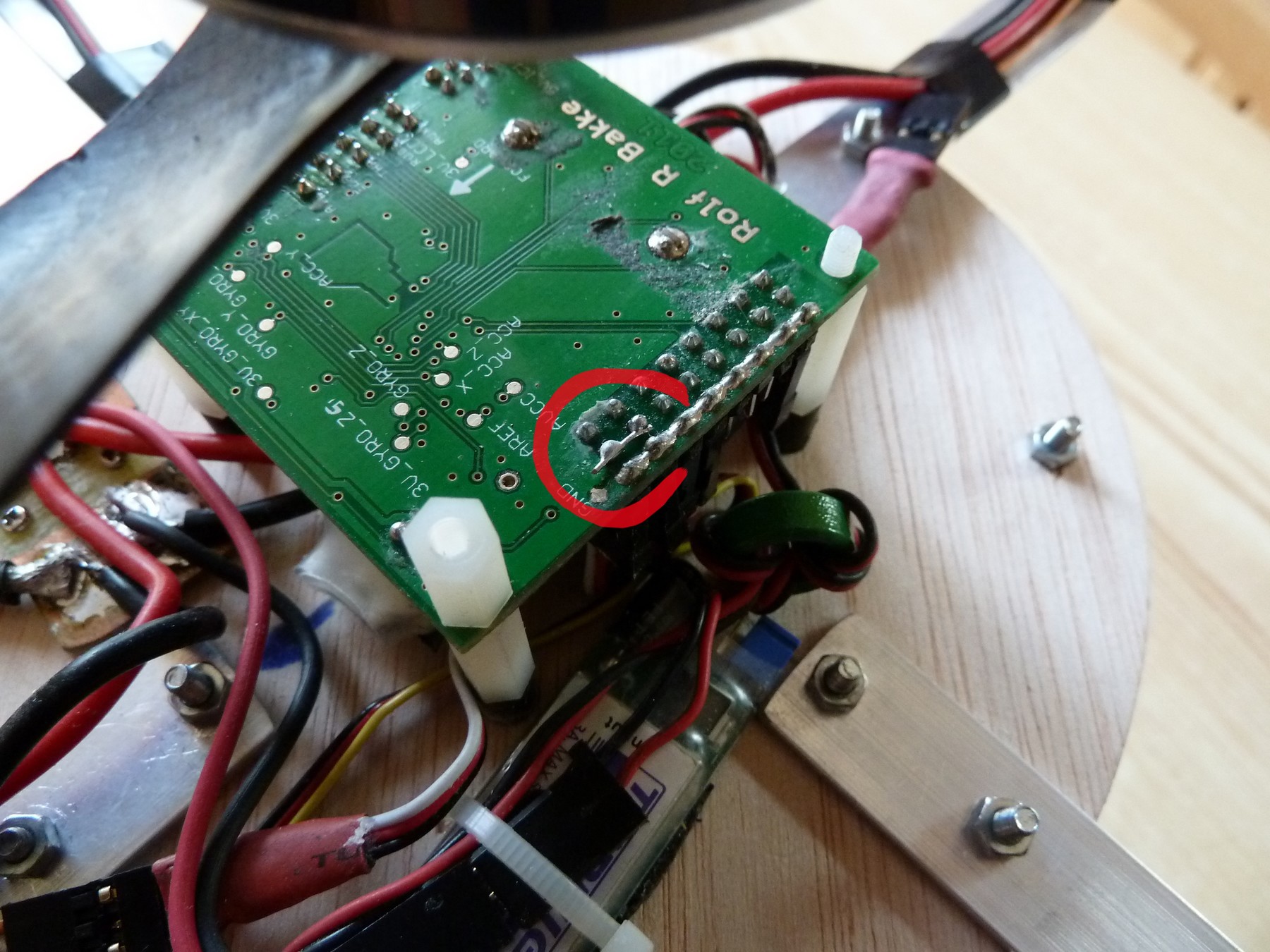
Les contrôleurs sont des 20 A. J’ai mis ceux que j’avais
mais comme ils sont opto j’ai été obligé de
faire une petite modif sur la carte : un pont entre les deux premiers
+ pour alimenter les servos et mettre un BEC externe. mais avec des contrôleurs
avec BEC, ce n’est pas la peine et c’est plus facile.
 |
 |
|
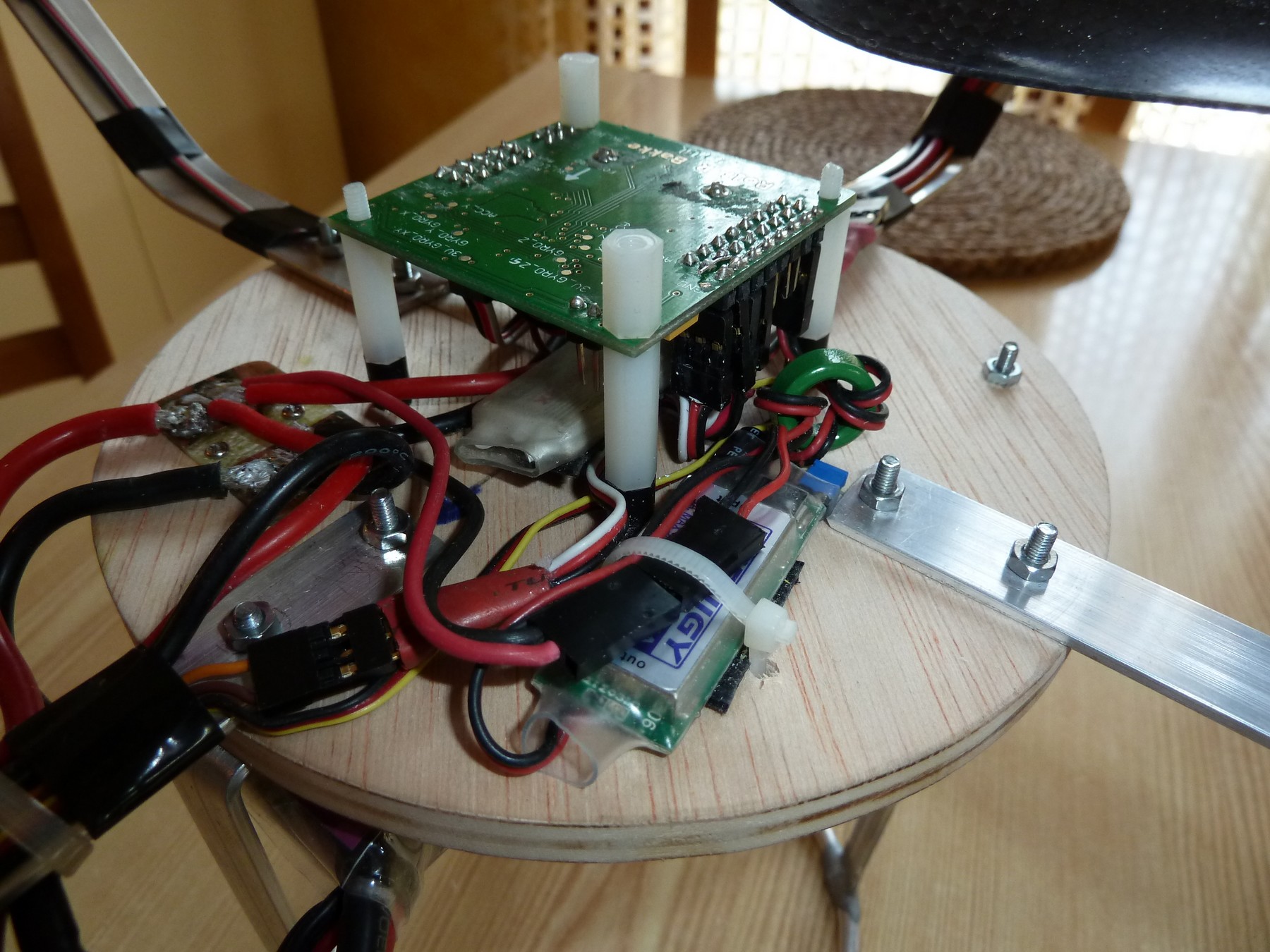
| Un pont est nécessaire entre les deux premiers + en cas d'utilisation de contrôleurs Opto. | Installation de la carte sur des colonnettes. Le BEC externe est ajouté sur le côté. |
L’accu est un 3S 3000 mAh. Avec un 4S
5000 mAh, ça marche aussi mais c’est beaucoup plus lourd.
J’ai utilisé 2 servos Hitec HS81 mais c’est un peu
juste : à changer.
Un morceau de plaque époxy cuivrée pour raccorder les fils
de puissance des moteurs ainsi que l’alimentation.
Un bonhomme tapé dans le coffre à jouets des enfants (il
y a longtemps qu’ils n’y jouent plus). Par contre, il faut
le modifier car il pèse beaucoup trop. Je n’ai gardé
que la tête, les mains, les bottes et les habits et j’ai refait
un corps en Styrodur. Mine de rien, je suis passé de 220 g à
95 g, ce n’est pas négligeable.
Je vais là aussi vous épargner la construction pas à
pas, je pense que les photos sont assez explicites
Le diamètre de la jupe fait 40 cm
Les gouvernes font 6 cm de corde, mais on doit pouvoir les diminuer un
peu car il faut très peu de débattements.
 |
 |
|
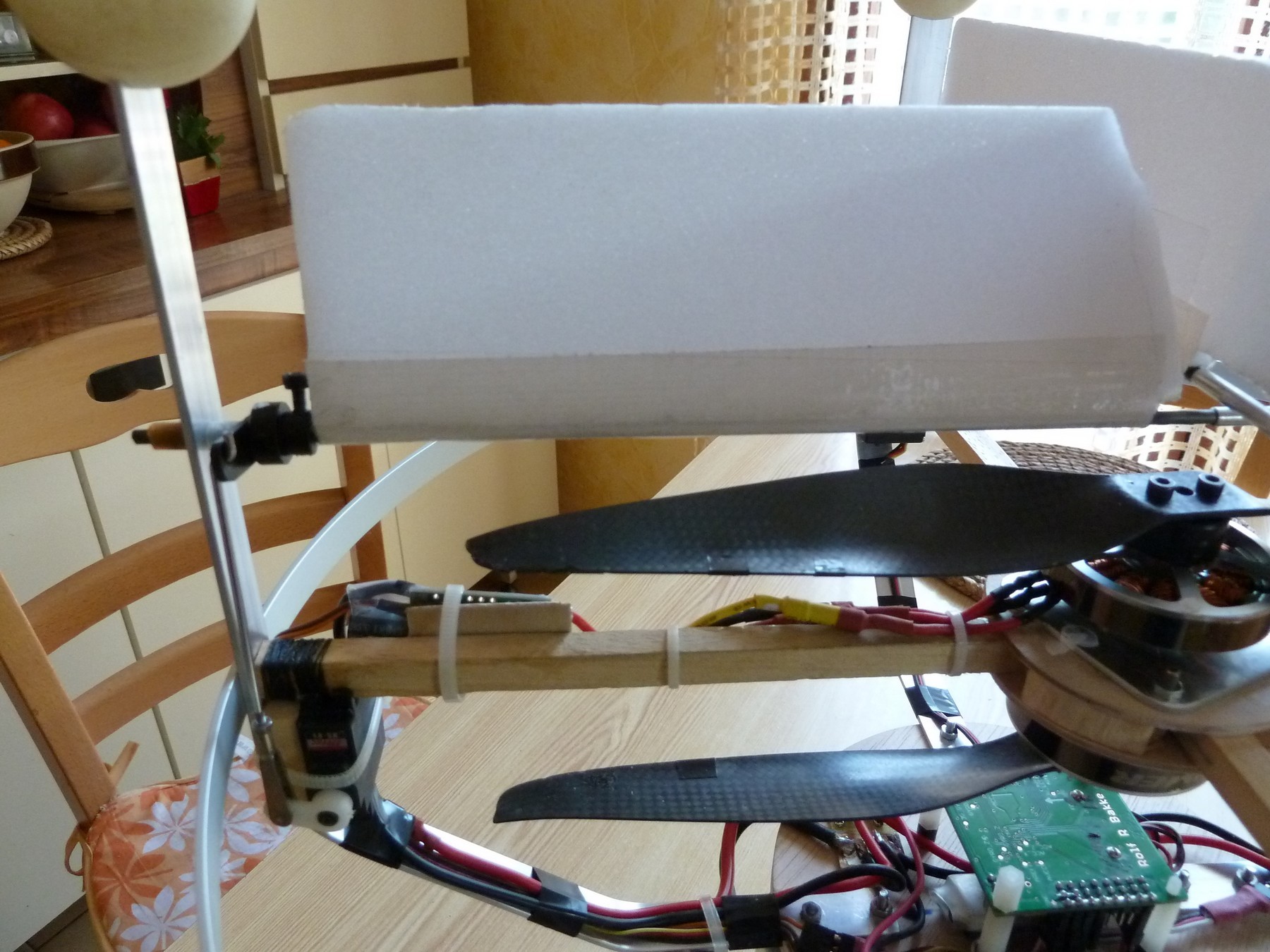
| L'équipement est fixé avec des colliers en nylon sur la croix en bois dur. | ||
 |
 |
|
 |
La plateforme commence à
ressembler à l'original. |
REGLAGES
DE LA CARTE |
Dans « load motor layout »
choisir “ Single copter 2M 2S”
J’ai mis le moteur de dessous en 1 (branchement sur la carte) avec
l’hélice à pas inverse.
Le moteur de dessus en 2 avec l’hélice à pas normal.
En 3, le servo droite gauche
En 4, le servo avant arrière
Sur la radio, choisir un modèle avion sans aucun mixage.
J’ai programmé ma carte comme sur la photo 4, mais il faudra
peut être adapter à votre configuration.
J’ai procédé comme suit : j’ai enlevé
les hélices, j’ai armé la carte avec le manche de
direction à droite, j’ai mis un peu de gaz et j’ai
vérifié que les gouvernes étaient dans le bon sens.
Pour régler le neutre à ce moment-là, il faut intervenir
dans « mixer editor » et « offset »
pour changer la valeur.
Ensuite il faut regarder que les compensations se font dans le bon sens
en inclinant l’appareil avant-arrière et droite-gauche. Pour
inverser, il faut aller dans « mixer editor » « aileron,
ch3 » ou « elevator ch4 »et inverser
le signe + ou –.
Pour les premiers essais, brancher la batterie, armer la carte, tenir
l’appareil à la main par-dessus, mettre un peu de gaz pour
monter à 1 m et régler les trims. Si tout a l’air
d’aller, lâcher tout et ça vole.
Pour décoller du sol, il faut mettre les gaz franchement pour monter
à 1 m et réduire pour voler.
| Réglages KK2 |
||||||||||||
| Load motor layout |
Load motor layout |
|||||||||||
| PI Editor |
P Gain |
P Limit |
I Gain |
I Limit |
Misc. |
Minimum Throttle |
10 |
|
|
|
||
| Roll (aileron) |
50 |
100 |
25 |
20 |
Height Dampening |
0 |
|
|
|
|||
| Pitch (profondeur) |
50 |
100 |
25 |
20 |
Height D. Limit |
30 |
|
|
|
|||
| Yaw (direction) |
50 |
20 |
50 |
10 |
Alamr 1/10 volt |
0 |
|
|
|
|||
| Stick
|
Roll (aileron) |
40 |
Servo filter |
50 |
|
|
|
|||||
| Pitch (profondeur) |
40 |
Mixer |
|
CH1 |
CH2 |
CH3 |
CH4 |
|||||
| Yaw (direction |
40 |
Throttle |
100 |
100 |
0 |
0 |
||||||
| Moteur |
90 |
Aileron |
0 |
0 |
-100 |
0 |
||||||
| Self-Level |
P Gain |
70 |
Elevator |
0 |
0 |
0 |
-100 |
|||||
| P Limit |
30 |
Rudder |
100 |
-100 |
0 |
0 |
||||||
| Trim roll |
0 |
Offset |
0 |
0 |
48 |
55 |
||||||
| Trim pitch |
0 |
Type/Rate |
High |
High |
Low |
Low |
||||||
| Mode |
Self Level |
Aux |
CPPM |
Roll |
1 |
|
|
|
||||
| Arming |
|
Pitch |
2 |
|
|
|
||||||
| Link roll pitch |
Yes |
Yaw |
3 |
|
|
|
||||||
| Auto disarm |
Yes |
Throttle |
4 |
|
|
|
||||||
| CPPM Enable |
No |
Aux |
5 |
|
|
|
||||||
| En 1 et 2, on branche les contrôleurs. En 3 et 4 servos, on branche les servos. |
||||||||||||
EVOLUTION |
 |
 |
|
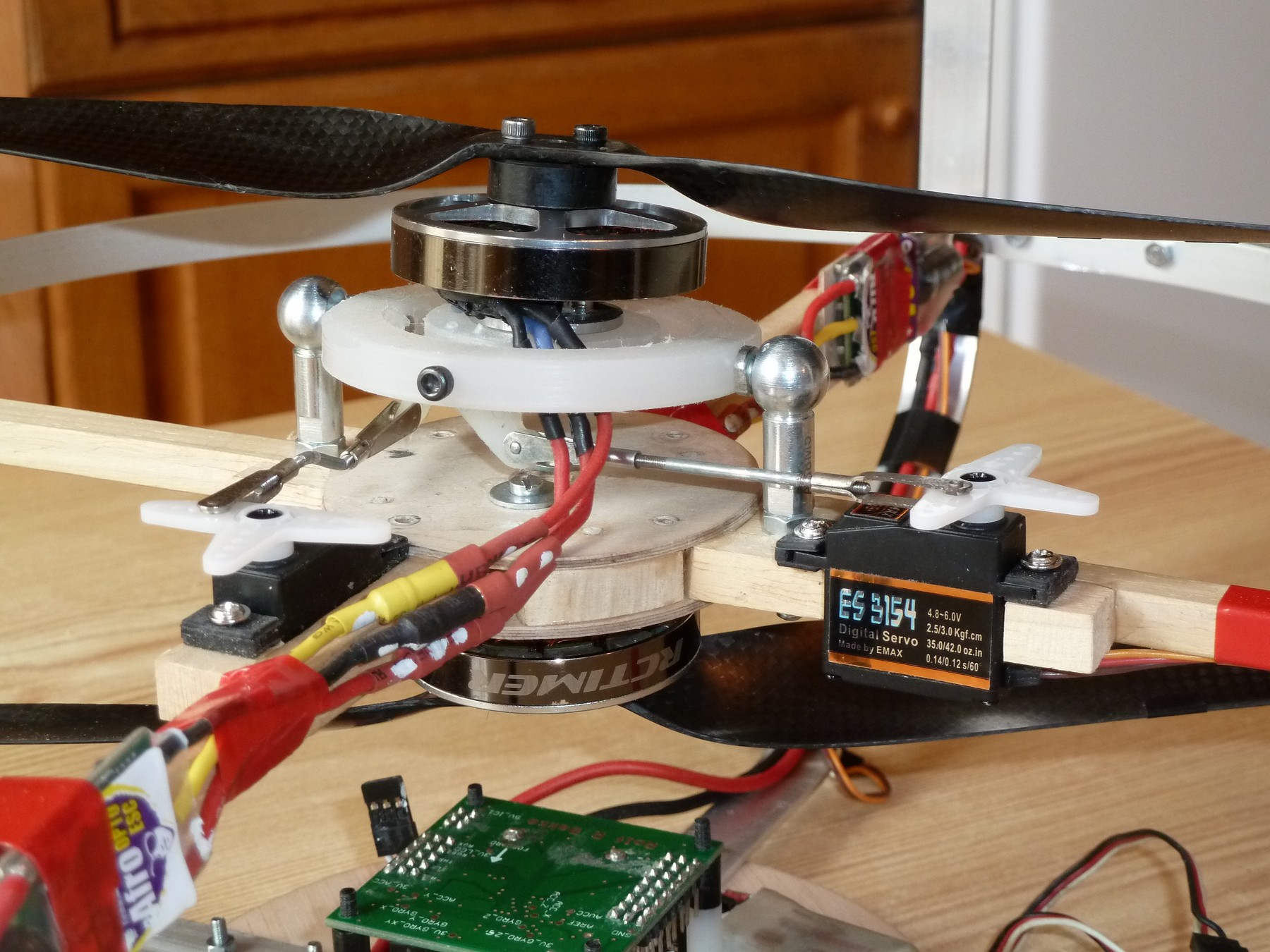
| Pas la suite, le moteur du bas a été monté sur cardan. Il peut donc s'incliner légèrement pour commander le roulis et le tangage. | ||
 |
 |
|
| Le moteur sur son cardan. | Le châssis est encore plus simple sans les gouvernes. |
Pour aller un peu plus loin dans la ressemblance avec la plateforme d’origine, j’ai voulu supprimer les gouvernes en Dépron. Pour cela j’ai dû monter le moteur du bas sur un cardan. J’avais essayé avec du contre-plaqué mais ça ne me convenait pas. J’ai donc taillé les pièces dans une planche à découper en téflon (pas celle de la cuisine mais une qui allait partir à la poubelle !). J’ai monté deux servos 2,5 kg, les commandes sont en rayon de vélo - c’est fou ce que ça peut servir pour un prix dérisoire mais faut une filière de 2 mm.
Les premiers essais étaient catastrophiques : plus de stabilité. Finalement, c’était que le centre de gravité placé trop bas, j’ai remonté la batterie de 5 cm et tout est rentré dans l’ordre, ça revole comme avant. Le centrage est environ 1 cm au-dessus de l’hélice
du moteur du haut.
|
 |
|
 |
La denière version avec le
moteur inférieur inclinable est visible sur cette vidéo. |
 |
 |
|
| Moteur du haut fixe et du bas articulé. | En vol devant la télé suisse. |
 |
 |
|
| Oups, un peu trop violent... | Finalement, c'est bien stable. |
 |
 |
|
J’espère vous avoir donné envie, c’est très agréable de chercher à faire soi-même plutôt que d’acheter tout fait. J’espère avoir été assez clair dans mes explications, ce n’est pas facile pour ne rien oublier, mais je vous fais confiance pour mettre votre touche personnelle au cas où vous voudriez essayer. |
Ce qui est bizarre c’est que lorsque tout marche bien, le plaisir diminue très vite et il faut passer à autre chose... Mais ceci n’engage que moi, chacun fait comme il le sent, manquerait plus que ça !
Contacter l'auteur : serge-romani@jivaro-models.org
 |
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||